Computational Exploration
of the
Structural Design Space
byCaitlin T. Mueller
B.S. in Art and Design, Department of Architecture Massachusetts Institute of Technology, 2007
M.S. in Structural Engineering, Department of Civil and Environmental Engineering Stanford University, 2008
Submitted to the Department of Architecture in Partial Fulfillment of the Requirements for the Degree of
Doctor of Philosophy in Architecture: Building Technology
at theMassachusetts Institute of Technology
June 2014© 2014 Caitlin T Mueller. All rights reserved.
The author hereby grants to MIT permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part in any medium now known or hereafter created.
Signature of Author: ______________________________________________________________ Department of Architecture May 2, 2014 Certified by: ___________________________________________________________________ John A. Ochsendorf Professor of Architecture and Civil and Environmental Engineering Thesis Supervisor Accepted by: ___________________________________________________________________ Takehiko Nagakura Professor of Architecture Chairman, Department Committee on Graduate Studies
Dissertation Committee:
John A. Ochsendorf
Professor of Architecture and Civil and Environmental Engineering Massachusetts Institute of Technology Thesis Supervisor
Sigrid Adriaenssens
Assistant Professor of Civil and Environmental Engineering Princeton University Thesis Reader
Jerome J. Connor
Professor of Civil and Environmental Engineering Massachusetts Institute of Technology Thesis Reader
Terry Knight
Professor of Architecture Massachusetts Institute of Technology Thesis Reader
Computational Exploration
of the Structural Design Space
byCaitlin T. Mueller
Submitted to the Department of Architecture
on May 2, 2014 in Partial Fulfillment of the Requirements
for the Degree of Doctor of Philosophy in Architecture: Building Technology
Abstract
This dissertation focuses on computational strategies for incorporating structural considerations into the earliest stages of the architectural design process. Because structural behavior is most affected by geometric form, the greatest potential for structural efficiency and a harmony of design goals occurs when global formal design decisions are made, in conceptual design. However, most existing computational tools and approaches lack the features necessary to take advantage of this potential: architectural modeling tools address geometry in absence of performance, and structural analysis tools require an already determined geometrical form. There is a need for new computational approaches that allow designers to explore the structural design space, which links geometric variation and performance, in a free and interactive manner.
The dissertation addresses this need by proposing three new design space strategies. The first strategy, an interactive evolutionary framework, balances creative navigation of the design space with a focus on performance. The original contributions of this strategy center on enhanced opportunities for designer interaction and control. The second strategy introduces structural grammars, which allow for the formulation of broad and diverse design spaces that span across typologies. This strategy extends existing work in geometry-based shape grammars by incorporating structural behavior in novel ways. Finally, the third strategy is a surrogate modeling approach that approximates the design space to enable fast and responsive design environments. This strategy contributes new ways for non-experts to use this machine-learning-based methodology in conceptual design.
These three complementary strategies can be applied independently or in combination, and the dissertation includes a discussion about possibilities and techniques for integrating them. Finally, the dissertation concludes by reflecting on its potential impact on design in practice, and by outlining important areas for future work.
Key words: conceptual structural design, design space exploration, structural optimization, interactive evolutionary algorithm, structural grammar, surrogate modeling, structural design tools
Thesis supervisor: John A. Ochsendorf
Acknowledgements
This dissertation would not have been possible without the thoughtful feedback and guidance from a variety of important advisors, colleagues, and friends. First, I am tremendously grateful to my dissertation advisor, Professor John Ochsendorf, who first introduced me to the joy of structural design in 2006, and who has been a supportive, creative, and incisive mentor in the years since. In particular, I thank Professor Ochsendorf for his open-mindedness, for his high expectations, and for his insistence on intellectual clarity.
My additional committee members have also been instrumental in a variety of ways. I thank Professor Jerome Connor for welcoming me into his weekly research meetings, and for many insightful discussions about the history and the future of structural engineering and design. I thank Professor Terry Knight for her knowledge and wisdom in computational creativity, and for her enthusiasm for interdisciplinary work. I thank Professor Sigrid Adriaenssens for sharing her formidable expertise and experience in innovative structural design, and for her advice about problem-framing and connecting with practice. As a group, my committee has been helpful, generous, and harmonious, and I greatly appreciate the productive group dynamic in addition to their individual contributions.
I acknowledge the help of additional faculty members and informal advisors. The Building Technology faculty — Professors John Fernández, Leon Glicksman, Les Norford, and Christoph Reinhart — were very helpful as I shaped my key research questions during the Building Technology Seminar, and in the years since. Faculty from the Computation for Design and Optimization program, especially Professor Karen Willcox, welcomed me to the world of computational engineering and provided important feedback. Finally, I thank author and educator Edward Allen for his groundbreaking books on creativity in structural design, and for his wisdom, support, and humor in discussions about my research.
I am grateful to my fellow students and friends for inspiring me with broad intellectual curiosity, and for their support and empathy. In particular, I thank the students of the Building Technology Lab, including Timothy Cooke, Noel Davis, Teri Hall, Jonathan Krones, Andrea Love, and David Quinn. I also thank my colleagues in the Structural Design Lab, which has become a flourishing scholarly community that I am honored to be a part of, especially Rory Clune, Catherine De Wolf, Benjamin Jenett, Samar Malek, and William Plunkett. Finally, I am indebted to student researchers who have directly helped me with the work in this dissertation: Virginie Arnaud, Ali Irani, Andrew Sang, Iovana Valdez, and Yuxing (Jocelyn) Wang.
Tireless and incredibly organized members of the MIT staff have played an important role in the success of this work. Most critically, I thank Kathleen Ross of the Building Technology Program for her never-ending energy and competence, and for saving the day for me on numerous occasions. I also thank the staff of the Department of Architecture headquarters, especially Renée Caso, for their clear-headed support and eagerness to help. I would also like to recognize the knowledge and warmth of the MIT Libraries staff, who have tracked down many obscure articles for me, and who have brightened my day during my visits to Barker and Rotch. I am also grateful for technological assistance from CRON, who have responded with patience to many computing emergencies over the years.
I am grateful to several generous sources of funding during my Ph.D. studies: the MIT Presidential Fellows program, the MIT Department of Architecture, and the Amar Bose Teaching Fellowship.
Finally, I thank my parents, Mark and Liz Mueller, and my husband, Martijn Stevenson, for their exuberant support of my academic pursuits. My parents cultivated a love of design and a passion for interdisciplinary learning in me at a young age, and taught me to aspire to creativity and intellectual courage. Martijn has been a close and extremely talented collaborator and partner, who continues to share his brilliance and expertise in software engineering with me, and who has also happily joined me in my explorations of the world of structures.
Table of Contents
List of Mathematical Symbols ... 15
I INTRODUCTION
17
1. Problem Statement
19
1.1. Conceptual design of architecture and structures... 191.1.1. Significance of structural form ... 20
1.2. Benefits of integrated structural design ... 21
1.2.1. Reduced environmental impact and construction cost ... 21
1.2.2. Architectural richness and elegance ... 21
1.2.3. Inherent safety and longevity ... 22
1.2.4. Counterexamples... 23
1.3. Existing computational design tools ... 24
1.3.1. Geometry-based tools for architects ... 24
1.3.2. Analysis-based tools for engineers ... 25
1.4. Key structural design tool features ... 25
1.4.1. Feedback features... 26
1.4.2. Guidance features... 26
1.5. Need for guidance-based structural design approach ... 26
1.5.1. Directed exploration ... 26
1.5.2. Diversity and surprise ... 26
1.5.3. Rapid and interactive results ... 27
C. T. MUELLER | PH.D. DISSERTATION, 2014 TABLE OF CONTENTS
2. Literature Review
29
2.1. Existing tools for structural design ... 29
2.1.1. Graphic statics tools ... 29
2.1.2. Real-time numerical structural analysis tools ... 30
2.1.3. Integrated numerical analysis modules for architectural modeling tools ... 33
2.1.4. Critique of feedback-only tools ... 35
2.1.5. Forming-finding tools for membrane and shell structures ... 35
2.2. Optimization in structural design ... 35
2.2.1. Optimization problem formulation ... 38
2.2.2. Gradient-based optimization ... 39
2.2.3. Heuristic optimization ... 39
2.2.4. Limitations of optimization in design ... 40
2.3. Promising directions beyond standard optimization ... 41
2.3.1. Interactive design space navigation ... 41
2.3.2. Grammar-based design space formulations ... 43
2.3.3. Design Space approximation through surrogate modeling ... 44
2.3.4. Integrated design approach ... 44
2.4. Challenges and opportunities ... 45
2.4.1. Specific research goals ... 45
II DESIGN SPACE STRATEGIES
47
3. Interactive Evolutionary Framework
49
3.1. Background on design space navigation...493.1.1. Navigation needs ...49
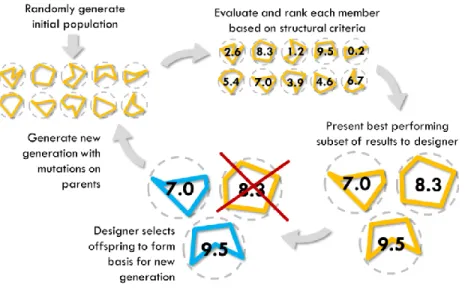
3.1.2. Evolutionary algorithms ...50
3.1.3. Interactive evolutionary algorithms ... 51
3.1.4. Applications in structural design ... 52
3.1.5. Specific needs ... 52
3.2. Framework overview ... 53
3.2.1. Framework and software architecture ... 53
3.2.2. Variables and design models ... 55
3.2.3. Analysis engines ... 56
3.2.4. Population generator ... 57
3.2.5. Graphical user interface ... 58
3.2.6. Extensibility ... 59
3.3. Enhanced interactivity and user input ... 60
3.3.1. Multiple design selection ... 60
3.3.2. Mutation rate ... 61
3.3.3. Generation size ... 62
3.4. Design quality and diversity enhancements ... 63
3.4.1. Hybrid automatic-interactive functionality ... 63
3.4.2. Diversity booster ...64
3.5. Expanded user experience... 65
C. T. MUELLER | PH.D. DISSERTATION, 2014 TABLE OF CONTENTS
3.5.2. Design refinement ... 67
3.6. Design example: cantilevered truss roof ... 68
3.6.1. Design problem formulation ... 68
3.6.2. Evolution of candidate designs ...69
3.6.3. Refinement of selected designs ... 70
3.7. Additional design examples ... 74
3.8. Summary of intellectual contributions ... 77
4. Trans-typology Structural Grammars
79
4.1. Background on design space formulation ... 794.1.1. Trans-typological design ... 80
4.1.2. Parametric design spaces ... 83
4.1.3. Rule-based design space ... 83
4.1.4. Structural grammars ... 86
4.1.5. Specific needs ... 87
4.2. Trans-typological design generation ... 88
4.2.1. General approach ... 88
4.2.2. Structural shapes ... 88
4.2.3. Recursive rules ... 90
4.2.4. Rules and state labels ... 90
4.2.5. Parametric and structurally aware rules ... 91
4.2.6. Structural performance evaluation ... 92
4.3. Design generation using grammar ...94
4.3.1. Manual rule application ... 95
4.3.2. Automatic random computation ...96
4.3.3. Hybrid manual-automatic computation ... 97
4.4. A trans-typology structural grammar for pedestrian bridges ... 98
4.4.1. Bridge design rules ...99
4.4.2. Implicit structural information and analysis engine ... 100
4.4.3. Randomly generated pedestrian bridge designs ... 100
4.4.4. Additional possible grammars ... 103
4.5. Summary of intellectual contributions ... 103
5. Performance-focused Surrogate Modeling
105
5.1. Background on design space approximation ... 1055.1.1. Need for computation speed ... 106
5.1.2. Approximation strategies ... 108
5.1.3. Surrogate modeling strategies ... 109
5.1.4. Specific needs ... 110
5.2. Ensemble black-box regression models as surrogates ... 110
5.2.1. Advantages of black-box and ensemble methods ... 111
5.2.2. Ensemble neural networks ... 111
5.2.3. Random forests ... 112
5.3. Performance-focused modeling approach... 113
5.3.1. Weighted sampling plans... 113
5.3.2. New rank-based error measures ... 117
C. T. MUELLER | PH.D. DISSERTATION, 2014 TABLE OF CONTENTS
5.4.1. User-specified accuracy ... 122
5.4.2. User-specified model-building preferences ... 122
5.4.3. Automatic parameter setting ... 124
5.4.4. Graphical testing results ... 124
5.5. Surrogate modeling case studies ... 126
5.5.1. Model accuracy ... 126
5.5.2. Model building time ... 128
5.6. Summary of intellectual contributions ... 128
III INTEGRATION AND CONCLUSIONS
131
6. Integrated Design Approach
133
6.1. Design space strategies applied together... 1336.1.1. General integration strategy ... 134
6.2. Evolutionary framework and structural grammars ... 134
6.2.1. Design models and variables ... 135
6.2.2. Crossover and mutation of variables ... 135
6.2.3. Analysis engines ... 137
6.2.4. Design problem setup ... 138
6.2.5. Design refinement ... 139
6.3. Evolutionary framework and surrogate modeling ... 139
6.3.1. Automatic surrogate model building ... 139
6.3.2. Model predictions and updates in interactive mode ... 140
6.3.3. Use of approximation in refinement mode ... 141
6.4. Structural grammars and surrogate modeling ... 141
6.4.1. Challenge of nonparametric formulation ... 141
6.4.2. Salient and emergent properties ... 142
6.4.3. Rule counts and parameter values ... 142
6.4.4. Pruning the design vector ... 143
6.5. Summary of intellectual contributions ... 143
7. Discussion and Conclusions
145
7.1. Need for novel design methodology ... 1457.1.1. Beyond guess-and-check ... 146
7.1.2. Beyond rapid feedback ... 146
7.1.3. Beyond standard optimization ... 146
7.2. Specific contributions ... 147
7.2.1. Interactive evolutionary framework ... 148
7.2.2. Trans-typology structural grammars ... 148
7.2.3. Performance-focused surrogate modeling ... 148
7.2.4. Integrated approach ... 149
7.3. Applications of proposed strategies ... 149
7.3.1. In practice ... 150
7.3.2. In the classroom ... 150
C. T. MUELLER | PH.D. DISSERTATION, 2014 TABLE OF CONTENTS
7.4. Directions for future work ... 151
7.4.1. Practical needs... 151 7.4.2. Technical needs ... 152 7.4.3. Theoretical needs ... 152 7.4.4. Cultural needs ... 152 7.5. Concluding remarks ... 153
IV APPENDICES
155
A. Structural Analysis Code Validation
157
B. Pedestrian Bridge Grammar Details
167
C. Automatic Surrogate Modeling Results
183
List of Mathematical Symbols
Symbol Meaning
Truss element cross-sectional area governed by local buckling Truss element cross-sectional area governed by axial stress
Cross-sectional area of th truss element Area of steel
Width
Number of copies used in weighted sampling plans Cost of assembly
Depth
Minimum allowable distance between designs to ensure diversity
Euclidean distance between th and th designs Size of the design space based on Euclidean distance
Modulus of elasticity of a material Axial force in truss element Objective function
Vector of applied loads Vector of reactions at supports
Sequence of rules comprising grammatical design representation Inequality constraint
Equality constraint Iterations
Required moment of inertia of a cross section
Effective buckling length
Submatrix of global stiffness matrix corresponding to free degrees of freedom
Submatrix of global stiffness matrix corresponding to free and fixed degrees of freedom Local element stiffness matrix
Submatrix of global stiffness matrix corresponding to free and fixed degrees of freedom Submatrix of global stiffness matrix corresponding to fixed degrees of freedom
Length of th truss element
Number of top-performing designs already included in group (for diversity check) Bending moment
Factored design bending moment
Number of elements considered (specifics vary)
Number of top-performing designs used to compute error measures Performance score
C. T. MUELLER | PH.D. DISSERTATION, 2014 LIST OF MATHEMATICAL SYMBOLS
Setting of th parameter in a parametric rule Uniform loading
Cost per connection
Observed rank of th observtion
Cost by volume of material Mutation rate, ranging from 0 to 1
̂ Predicted rank of th observtion Thickness
Normalized time
Transformation matrix from global to local coordinate systems Vector of displacements of free degrees of freedom
Vector of displacements of element degrees of freedom in local coordinate system
Volume of structural material
Scalar weights (randomly generated in evolutionary crossover) Design vector
th design variable in the design vector
th design variable in the design vector of the th design Lower bound of
Upper bound of
Design variable setting resulting from crossover
Design variable setting resulting from mutation
Randomly generated design variable setting
Observed value of th observtion ̂ Predicted value of th observtion
Mean of a normal probability distribution
Standard deviation of a normal probability distribution Variance of a normal probability distribution
PART I:
Introduction
“The loftiest and most difficult problems arise in architecture from the need to realize a synthesis between opposing sets of factors: harmony of form and the requirements of technology, heat of inspiration and the coolness of scientific reason, freedom of imagination and the iron laws of economy.”
CHAPTER 1:
Problem Statement
This dissertation presents new computational strategies that encourage creativity in conceptual structural design. The first chapter motivates this research with a discussion of current design approaches and available tools, critiquing existing methods and identifying the needs and opportunities that the research in this dissertation addresses.
1.1 Conceptual design of architecture and structures
In building design disciplines, including architecture and structural engineering, the design process is conventionally divided into four sequential phases: Conceptual Design, Schematic Design, Design Development, and Construction Documents (American Institute of Architects, 2007). In practice today, major decisions regarding the building’s geometry, massing, and overall form are usually made during the first phase, Conceptual Design (Hsu & Liu, 2000; Wang et al., 2002). This phase is typically carried out by the architecture team alone, before strong involvement of engineering consultants.
After the project has already taken shape, structural engineers and other consultants typically begin work, with the task of developing engineering strategies to enable the conceptual design vision, as illustrated in Figure 1.1. This means that in standard practice, structural considerations are often subservient to architectural goals (Macdonald, 2001). The design process is necessarily linear and unidirectional, and there are few opportunities for structural input to inform or improve the initial concept in significant ways (Holgate, 1986).
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 1: PROBLEM STATEMENT
Figure 1.1: Relationship between design freedom and design knowledge in building design projects. The most
opportunity for design impact and creativity occurs during conceptual design, but structural considerations usually enter the process far later. This limits the ability of structural engineers to contribute impactful ideas in the design process. After Fabrycky & Blanchard (1991) and Paulson (1976).
The structural engineering team’s tasks during schematic design include structural material and system selection, preliminary structural member sizing, and the development of structural strategies for unusual design elements and conditions. However, because much of the overall design geometry has already been set at this stage, the engineering team rarely provides advice or feedback to the architecture team on form.
1.1.1 Significance of structural form
History, theory, and nature show that for structural performance, overall form matters much more than material, member sizing, or internal topology (Thompson, 1942; Zalewski et al., 1998; Larsen & Tyas, 2003; Allen & Zalewski, 2010). The geometry of a building’s structure directly determines the distribution and magnitude of the forces it must resist (Macdonald, 2001). Uruguayan structural designer Eladio Dieste (1917 – 2000) is quoted in an elegant expression of this point:
The resistant virtues of the structures that we seek depend on their form; it is through their form that they are stable, not because of an awkward accumulation of material. There is nothing more noble and elegant from an intellectual viewpoint than this: to resist through form (Anderson, 2004).
As a simple example, Figure 1.2 shows three possible geometries for a long-span arch roof. As noted, the maximum force in the least efficient form is three times that in the most efficient.
Today, with advances in a broad range of technologies, it is possible to design, analyze, and build forms regardless of their structural performance (Addis, 1994). In fact, there is a recognized ingenuity in meeting the challenge of making structurally poor forms work in spite of their inefficiencies (Macdonald, 2001). However, this does not mean that this is the best way forward. This dissertation argues for an alternate paradigm in which structural considerations are integrated into form-making in the earliest phase of the design process: conceptual design.
time into design process
pe rc entage conceptual design schematic design design development construction documents 100%
design
freedom
knowledge
design
involvement of structural engineers
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 1: PROBLEM STATEMENT
Figure 1.2: Three possible geometries for a long-span arch roof, with maximum axial force under uniform vertical
loading in the arch noted below. The increased curvature of design (c) reduces the internal forces in the arch by a factor of three compared to design (a).
1.2 Benefits of integrated structural design
Integrating structure into conceptual design offers a way to harness the power of good structural form. There are considerable advantages to this approach, as evidenced by both the historical and more recent examples highlighted in the following sections.
1.2.1 Reduced environmental impact and construction cost
By finding efficient structural forms during conceptual design, considerable amounts of structural material can be saved. Material savings means consuming fewer resources and spending less on construction. Historically, structural designers such as Robert Maillart of Switzerland (1872 – 1940) were awarded projects by developing the most cost effective designs through creative form exploration (Billington, 1983). More recently, the Luxembourgian structural designer Laurent Ney (b. 1964) has similarly won design competitions with structurally efficient and visually striking forms (Ney et al., 2010). Finally, examples like the Pines Calyx conference center in Dover, England are able to significantly reduce embodied energy through a clear and architecturally integrated structure developed in conceptual design (Ramage, 2007). These examples are illustrated in Figure 1.3.
1.2.2 Architectural richness and elegance
Many in the architecture and design community have argued that a harmony between the aesthetic and technical goals in a project imparts crucial value and rigor. For example, in describing the work of Italian architect-engineer Pier Luigi Nervi (1891 – 1971), the architectural critic Ada Louise Huxtable writes, “His buildings are most remarkable for the clarity of their engineering. The power and grace of these extraordinary shapes and patterns stems directly from their structural logic, and are inseparable from it” (1960). Indeed, Nervi’s approach used structure directly as a form-generating principle to discover new and exciting shapes for architecture, as shown in Figure 1.4.
Other examples demonstrate the success achievable by simultaneously solving architectural and structural problems. In the Dulles Airport Terminal by architect Eero Saarinen (1910 – 1961), the evocative swoop of the hanging roof suggests flight, but also reveals the flow of internal forces through its structural simplicity. In the San Francisco International Terminal designed by Skidmore, Owings & Merrill (SOM), the three-dimensional
(c) Fmax = 500 kips
(b) Fmax = 750 kips
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 1: PROBLEM STATEMENT
truss design achieves a long, column-free span while also allowing filtered daylight to enter the space. These examples are illustrated in Figure 1.5.
Figure 1.3: Design examples illustrating materials savings, and thereby reduced cost and environmental impact, through
integrating structure into conceptual design and architectural form selection.
Figure 1.4: Projects designed by the Italian architect-engineer Pier Luigi Nervi.
1.2.3 Inherent safety and longevity
Building forms that result from integrated structural design are safe by their nature, rather than through extreme exertion on the part of structural engineers and the high-strength materials they employ. Lower internal forces make structures more robust and forgiving of material and construction variation. Examples that still stand after hundreds of years, such as the masonry cathedrals of Europe and the timber stave churches of Scandinavia, shown in Figure 1.6, prove that such forms are enduring.
(a) Shed roof by Robert Maillart in Chiasso, Switzerland (1924). Image from Billington (1990).
(b) Footbridge by Ney + Partners in Knokke-Heist, Belgium (2007). Image from Ney et al. (2010).
(c) Pines Calyx Conference Center by Cameron Taylor Bedford and the MIT Guastavino Team in Dover, England (2005). Image from The Bay Trust (2012).
(b) Gatti Wool Factory in Rome, Italy (1951). Image from Nervi (1956).
(a) Airplane hangar in Orvieto, Italy (1935). Image from Nervi (1957).
(c) Turin Exhibit Hall B in Turin, Italy (1949). Image from Nervi (1957).
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 1: PROBLEM STATEMENT
Figure 1.5: Examples of projects that concurrently fulfill architectural and structural goals.
Figure 1.6: Historical examples of projects that have endured due to their structural forms.
1.2.4 Counterexamples
In contrast, when architectural concepts are developed in absence of structural influence, results can be wasteful, expensive, maintenance-intensive, and in the worst cases, unsafe. Architect Frank Gehry’s Walt Disney Concert Hall in Los Angeles required a complex and materially intensive structure to fit inside and support its whimsical forms (Naeim et al., 1999). Unlike his later Dulles Airport, the thin-shell roof of Eero Saarinen’s Kresge Auditorium at MIT was famously designed according to geometric rather than structural principles (Billington, 1983; Mark, 1990), resulting in unexpected large initial deflections and years of repairs (Cohen et al., 1985). Finally, Terminal 2E of the Charles de Gaulle airport in Paris was shaped in a way that induced large internal forces and depended on high-strength materials to stand up. This building collapsed in
(a) Cathedral in Reims, France (1275). Image by Magnus Manske.
(b) Borgund Stave Church in Norway (1180). Image by Flickr user zoetnet.
(a) Washington Dulles Terminal by Eero Saarinen in Virginia, U.S. (1962). Image from California Literary Review.
(b) San Francisco International Terminal by SOM (2000). Image by Oleg Sklyanchuk.
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 1: PROBLEM STATEMENT
2004, less than a year after its opening, killing four people and resulting in €130 million in repair and replacement costs (Clark, 2008). These examples are illustrated in Figure 1.7.
Figure 1.7: Projects with forms not primarily guided by structural behavior.
1.3 Existing computational design tools
Today’s architecture and engineering practices make widespread use of computational tools throughout the design process, and currently available tools both reflect and enforce existing design strategies (Hsu & Liu, 2000; Wang et al., 2002).
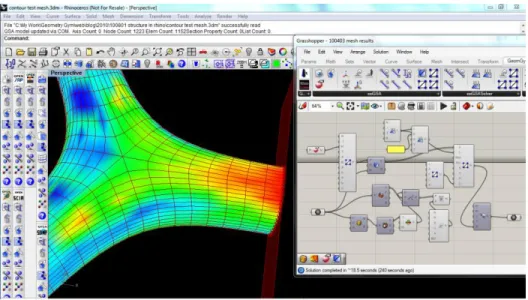
1.3.1 Geometry-based tools for architects
Architecture tools, starting with Computer-Aided Drafting programs in the 1980s, allow users to thoroughly document, and more recently generate, both conceptual and detailed designs. An increasing interest in complex geometry has led to powerful 3D modeling software which, coupled with scripting capabilities, enables the development of impressively intricate forms, as shown in Figure 1.8.
Figure 1.8: Geometries generated using generative algorithms in the program Rhino and the plugin Grasshopper
(Khabazi, 2012).
(b) Kresge Auditorium by Eero Saarinen in Cambridge, U.S. (1955). Image by Wikipedia user Dadero.
(a) Walt Disney Concert Hall by Frank Gehry in Los Angeles , U.S. (2003). Image by Flickr user BudCat14/Ross.
(c) Collapse of the Charles de Gaulle Terminal 2E in Paris, France (2004). Image from the Daily Mail.
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 1: PROBLEM STATEMENT
1.3.2 Analysis-based tools for engineers
Computational tools for structural analysis mirror architecture tools in their power and capacity for complexity, and yet also maintain existing design roles. Finite element analysis (FEA) programs are capable of determining stresses, deflections, and dynamic behavior for highly complicated geometry using sophisticated techniques, as shown in Figure 1.9. Recent developments focus on increased accuracy and speed under a range of conditions. However, these tools are of little use in conceptual design; they require that a geometry be provided to be analyzed, and are incapable of assisting with geometry generation. Again, these tools relegate engineers to the tasks of verifying the form and sizing the members, thus limiting or eliminating their involvement in conceptual design.
Figure 1.9: Sample analysis output from SAP2000, a finite element analysis program (Computers and Structures, 2012).
1.4 Key structural design tool features
The emerging research area of conceptual structural design computation seeks to bridge the gap between these existing computational approaches, enabling a true integration of structural input during conceptual design. This dissertation identifies two key types of features for such tools, feedback and guidance, as shown in Figure 1.10.
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 1: PROBLEM STATEMENT
1.4.1 Feedback features
A clear remedy for the lack of performance evaluation in geometry-generation tools is to integrate structural analysis capabilities into such software. It is critical that such analysis be fast, or ideally real-time, to allow for an interactive user experience. This type of feature shows users how design changes will affect structural performance according to metrics such as required material volume, structural stiffness, or estimated construction costs. This has been implemented in a number of applications both in research and practice, but is limited by the speed of computational structural analysis.
1.4.2 Guidance Features
To shift engineering software from the existing analysis and verification focus, tools for structural design should include form-guiding capabilities. This type of feature enables the software to suggest new geometries to the user in order to improve the structural performance of a design concept. While the field of optimization offers insight into ways to achieve this, there has been little progress in developing guidance-based tools for conceptual design both in research and practice. To truly encourage integrated conceptual structural design through modern computational tools, it is critical to develop methodologies that achieve this functionality.
1.5 Need for guidance-based structural design approach
This dissertation addresses the problem of integrating structural guidance into conceptual design through computational means. To achieve this, there are three specific requirements for which this research offers solutions through novel intellectual contributions.
1.5.1 Directed exploration
First, guidance-based tools must carefully balance the ability to suggest design changes with freedom of exploration within the design environment. There is no single correct answer in architectural design, and it is crucial that such tools allow for a plurality of design options, while nevertheless encouraging the user towards those with better performance. Chapter 3 offers a new approach to achieve these goals using an interactive evolutionary algorithm for design space navigation.
1.5.2 Diversity and surprise
For use in conceptual design, a guidance-based methodology should perform like a talented team member in a brainstorming session, generating a broad range of new and unexpected design ideas. This capability is important not only to improve structural performance, but also to discover exciting architectural forms. To accomplish this, the methodology should incorporate a broad and varied design space. Chapter 4 presents a strategy to formulate broad and diverse design spaces through structural grammars.
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 1: PROBLEM STATEMENT
1.5.3 Rapid and interactive results
Another challenge in integrating structure into computational design tools is that structural analysis can be computationally expensive and slow. A successful computational approach should include rapid performance prediction strategies to allow for an interactive, real-time user experience. Chapter 5 addresses this issue by introducing a performance-focused surrogate modeling strategy for design space approximation.
1.6 Organization of dissertation
This dissertation is divided into three parts: Introduction, Design Space Strategies, and Integration and
Conclusions.
The first part, Introduction, includes the problem statement and critical literature review for the research question considered in this dissertation.
Chapter 2 presents existing work in the field of computational tools and methodologies for conceptual structural design. This includes a critical review of structural optimization. Additionally, this chapter contains an overview of existing work relating to structural design tools in the three specific research areas that comprise the original contributions of this thesis. Further detailed background and literature review for these topics are provided in the subsequent chapters that present original work. Finally, this chapter summarizes current challenges and identifies the opportunities that this dissertation responds to.
The second part, Design Space Strategies, describes three new computational strategies for conceptual structural design, including additional literature review relevant to strategies employed in each chapter. Chapter 3 introduces an interactive evolutionary framework for structural design that guides users toward high performing designs while allowing for architectural exploration. This chapter includes extended background information on interactive evolutionary algorithms, parametric problem formulation, design performance evaluation metrics, and user controls and experience.
Chapter 4 proposes a new approach for trans-typology structural grammars that generate conceptual design possibilities across typology boundaries. A detailed review of shape grammars and a prescription for the new approach of structural grammars is included, as well as a discussion of structural typologies in conceptual design. A specific new grammar is presented, including a discussion of grammar properties, states, and rules, and examples of generated designs are also illustrated.
Chapter 5 discusses an approach for design space approximation to enable rapid performance evaluation of candidate design concepts. It includes a review of surrogate modeling in other optimization applications as well as a review of nonparametric regression techniques developed in the field of machine learning. The chapter also discusses new model training procedures and error measures, and introduces a strategy for building surrogate models in an automated way accessible for non-experts. The approach is exemplified through several case studies.
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 1: PROBLEM STATEMENT
The third part, Integration and Conclusions, shows how the three previously presented methodologies could be integrated into combined design approaches to solve a range of conceptual design problems, and concludes the dissertation with a summary of contributions.
Chapter 6 discusses the possibilities and challenges of integrating the strategies in pairwise combinations and into a single unified approach, including suggestions of techniques for achieving these integrations.
Chapter 7 summarizes the specific intellectual contributions of the thesis and discusses potential impact, envisioned applications, and important directions for future research.
Additionally, there are three appendices that document detailed results referred to in the Design Space
CHAPTER 2:
Literature Review
This chapter presents existing work in the field of computational tools for conceptual structural design, including a critical review of existing feedback-based tools and the field of structural optimization. Additionally, this chapter identifies and discusses specific developments in three key areas, and illustrates the need for further research that the work of this dissertation addresses.
2.1 Existing tools for conceptual structural design
As noted in Chapter 1, the majority of computational tools used in architecture and engineering in practice are either geometry-driven or analysis-driven, and reflect the lack of overlap between the two disciplines. However, some progress has been made in developing tools that bring these functionalities together to assist with conceptual structural design.
Almost all such tools employ feedback functionality, one of the two key features identified in Chapter 1. This section will present an overview of these tools, and will argue that new innovations are needed to bring the second key feature, guidance, to tools available for practitioners.
2.1.1 Graphic statics tools
Graphic statics is a graphical, as opposed to numerical, method of calculating internal forces in axially-loaded structures such as arches, cables, and trusses. Developed from fundamentals established in the early 1800s, the method was formalized in 1866 by Culmann in his book Die graphische Statik (1866). A recent book by Allen and Zalewski (2009) gives an overview of the method and applies the method to conceptual design problems.
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 2: LITERATURE REVIEW
Engineers made widespread use of this technique for both design and analysis until the 1970s, when numerical methods gained prominence due to the increasing calculation power of computers.
Recently, there has been renewed interest in graphic statics because of its rediscovered simplicity and power. Several researchers have developed computational implementations that allow users to manipulate structures in real time and observe the how internal forces change through the force polygon. One pioneering example is Active Statics, an online tool that contains seven interactive design examples (Greenwold & Allen, 2003). A screenshot from this tool is shown in Figure 2.1.
Further advancements are evident in eQULIBRIUM, an online interactive tool that illustrates graphic statics techniques on a wider range of example problems (Van Mele et al., 2009-2012). Additionally, Shearer (2009) has created RhinoStatics, a plug-in for the 3D modeling software Rhinoceros that performs graphics statics analysis of structures drawn by users. These are illustrated in Figure 2.3 and Figure 2.2 respectively.
While constituting an important step forward, this class of tools is limited in several ways. First, graphic statics techniques are restricted to relatively simple problems, generally two-dimensional and statically determinate. Second, with the exception of Shearer’s work, most currently available graphic statics computational tools work only on pre-set examples, and are not flexible enough to provide feedback on a design problem presented by the user. These issues are addressed in the next class of tools, which provide real-time numerical structural analysis.
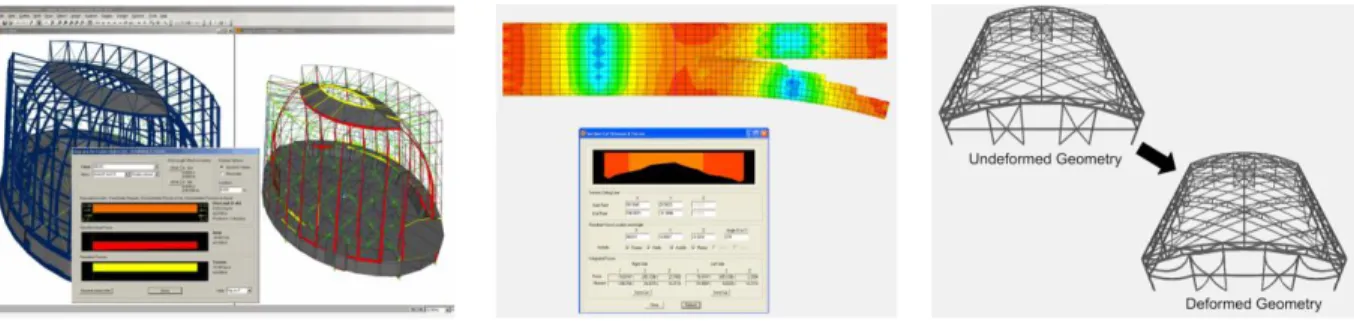
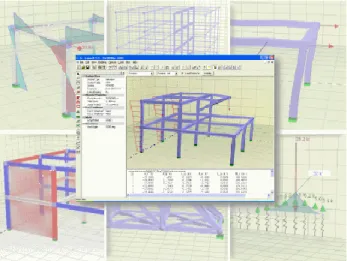
2.1.2 Real-time numerical structural analysis tools
Several tools have been developed that employ full numerical structural analysis, or finite element analysis, to provide real-time or rapid feedback about structural performance, including internal forces, reactions, and sometimes required material or cost, to users. These tools tend to be structural analysis programs directed at engineers, with the promise of allowing for a more free exploration of structural forms. The advantage of this class of tools over traditional structural analysis programs is the speed with which they convey results.
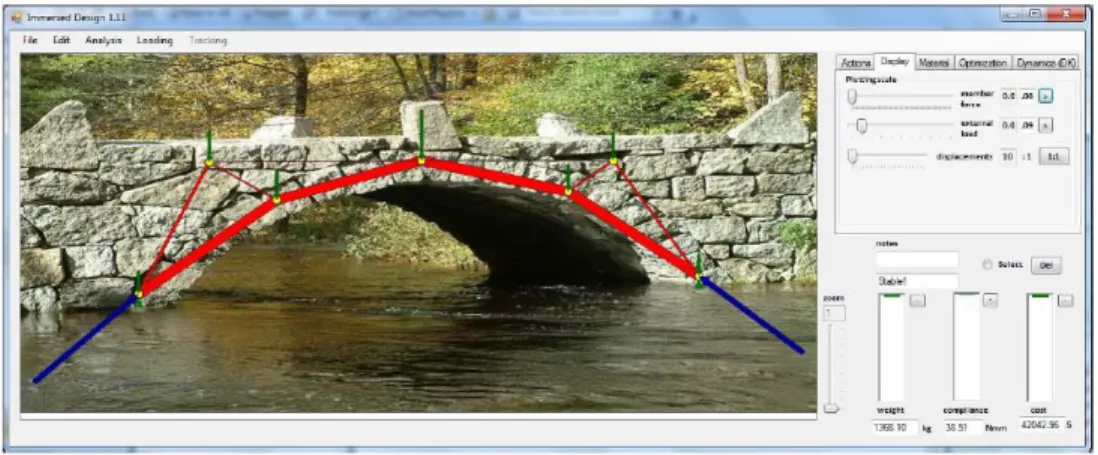
There are numerous examples, both in academic research and commercial use, as shown in Figure 2.4 through Figure 2.8. One of the first programs of this type is Arcade, a free academic software tool, which uses a physics engine to simulate the dynamic behavior of two-dimensional structures in real time (Martini, 2006). SAP2000, a widespread commercial structural analysis program, first introduced the Model-Alive feature, which offers real-time analysis for small to medium-sized structures, with its Version 12 (Computers and Structures, 2008). Dr. Frame 3D is a commercial software program that allows for real-time static analysis for a range of three-dimensional problems (Dr. Software, 2009). Work by Clune (2010) includes a two-three-dimensional structural design environment for truss structures that provides real-time feedback for multiple objectives – weight, compliance, and cost – and also incorporates optimization functionality. More recently, Autodesk released Force Effect, a tablet application that allows users to analyze and design structures in real time using a mobile device (Autodesk, 2011).
While these tools are effective to varying degrees, they are all restricted in the size and complexity of the structures that they analyze in real time because of computational limitations. Additionally, most tools of this class exist within the realm of structural engineering software, and are not designed to be used by architects or
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 2: LITERATURE REVIEW
Figure 2.1: Active Statics computational tool to use graphic statics in an interactive environment (Greenwold & Allen,
2003).
Figure 2.2: eQULIBIRUM, an interactive online tool that illustrates graphic statics techniques through a range of
examples (Van Mele et al., 2009-2012).
Figure 2.3: RhinoStatics computational tool to implement graphic statics within a CAD environment as a Rhino plugin
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 2: LITERATURE REVIEW
Figure 2.4: A screen shot of Arcade, showing a design process based on rapid feedback from the tool (Martini, 2006).
Figure 2.5: Model-Alive in SAP2000, showing the removal of a member and updated analysis (Computers and
Structures, 2008; 2011);
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 2: LITERATURE REVIEW
Figure 2.7: Work by Clune (2010) showing an interactive real-time analysis modeling environment.
Figure 2.8: ForceEffect real-time statics simulation for tablet and phone devices by Autodesk (2011).
2.1.3 Integrated numerical analysis modules for architectural modeling tools
Finite element analysis tools that integrate directly into architectural drawing and modeling programs allow for a smooth and fluid workflow, without the need to transfer design information and results between software programs. These tools are conceived as modules or plugins that perform structural analysis directly on architectural or geometric models. There are a number of examples of such tools, including Geometry Gym for Rhinoceros (Mirtschin, 2011) and Robot for Revit (Autodesk, 2012) .
While attractive, these tools have several drawbacks. From a practical standpoint, they are tied to the modeling program into which they are integrated, and are therefore only accessible to designers who use that program. Due to both the high rate of technology turnover and the breadth of programs in use, this presents a serious limitation. From a theoretical standpoint, it is generally problematic to treat an architectural geometry model
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 2: LITERATURE REVIEW
directly as a structural model, since many assumptions about structural properties, boundary conditions, and behavior must be made in translation.
.
Figure 2.9: Finite element analysis of a component within the Rhinoceros modeling environment using Geometry Gym
(Mirtschin, 2011).
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 2: LITERATURE REVIEW
2.1.4 Critique of feedback-only tools
The types of tools reviewed in this section begin to address the gap between geometry tools and analysis tools by bringing structural analysis to architectural geometry in a rapid way. However, while rapid feedback improves existing design methods by increasing speed, it does not fundamentally change them. Feedback-only tools still enforce a geometry-first, analysis-second paradigm that amounts to a guess-and-check approach. To move beyond this, tools must offer a way to synthesize new geometries using structural principles implicitly.
2.1.5 Form-finding tools for membrane and shell structures
One compelling way for designers to explore this synthesis is with a set of tools that employ form-finding techniques. These tools use various algorithms to discover equilibrium configurations for spatial structures that contain little or no bending, and move beyond feedback in important ways. Key examples of such tools include CADenary, a particle-spring tool for exploring pure-compression and pure-tension structures (Kilian & Ochsendorf, 2005; Kilian, 2006), RhinoVAULT, a tool for designing compression-only structures using thrust network analysis (Rippmann et al., 2012), and a web-based numerical form-finding tool from Princeton’s Form Finding Lab that uses dynamic relaxation for shell design (Adriaenssens et al., 2012; Adriaenssens, 2014). These tools move beyond feedback to guide designers to high-performing design options. However, they only work for a narrow range of structural typologies, and are not generally applicable to problems beyond membrane and shell structures. It is therefore necessary to look for a broader approach that can be used systematically on a range of problem types. As suggested in Chapter 1, this can be achieved, in theory, by structural optimization.
2.2 Optimization in structural design
Structural optimization is a promising field with a rich history, but it has nevertheless yet to make a significant impact on structural design in practice. This section explains the development of structural optimization theory and discusses the reasons for its disconnect with design.
The history of structural optimization can be traced back to Galileo Galilei (1564 – 1642), who in 1638 determined the minimal-material shape of a cantilevered beam subjected to a point load at its free end (Timoshenko, 1953; Heyman, 1998). By finding the parabolic profile, as illustrated in Figure 2.11, Galileo showed that mathematics can be used to find forms that use material as efficiently as possible to support a given load. For many years since, this has been the goal of structural optimization.
Since Galileo, scholars have solved a steady stream of increasingly complex structural optimization problems (Wasiutynski & Brandt, 1963). One of the most well-known contributions comes from Anthony G. M. Michell’s (1870 – 1959) work on another cantilever problem almost three hundred years after Galileo’s original work. Michell showed how to find an optimal truss solution for the point-loaded cantilever problem (and a few others) in his seminal 1904 paper, “The Limits of Economy of Material in Frame-structures,” as shown in Figure 2.12. Like Galileo, Michell was looking for minimal-material analytical solutions for key canonical problems, rather than offering a general approach for optimization of any structure.
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 2: LITERATURE REVIEW
Figure 2.11: Drawings from Galileo’s Dialogues Concerning Two New Sciences (1638), showing in (a) an incorrect
linearly varying solution for the minimal-material shape of a cantilevered constant-width beam supporting a point load at its tip, along with (b), the correct parabolically varying solution (Timoshenko, 1953).
Figure 2.12: Illustration from Michell’s 1904 paper which laid the foundations of truss optimization. This figure shows
the optimal form and member distribution of a cantilevered planar truss structure subject to a point load.
A more general approach that resembles methods in use today was developed in the 1960s, with critical work by Schmit (1960). A cohesive overview of work since is given by Spillers & MacBain (2009). In contrast with the analytical methods of scholars like Galileo and Michell, the new numerical methods attempted to find the optimum by iterating through potential solutions in a systematic way (Kirsch, 1981). While iterative approaches were practically impossible in the days of manual calculation, the newly developed computers brought rapid calculations for large problems to reality.
Importantly, structural optimization researchers in the 1960s referred to their discipline as structural synthesis (Schmit, 1981; Vanderplaats, 2010), revealing the early aspirations of the field and evoking ideas of design in its truest sense: creating something new. However, the work actually dealt with choosing member cross sections for predetermined geometries and member configurations (Fox & Schmit, 1966). For example, Figure 2.15 shows a three-dimensional truss tower with 25 elements, whose cross sections were selected using a numerical weight minimization algorithm. This type of problem is referred to as size optimization. While improvements since the 1960s have broadened the reach of structural optimization strategies, the general disconnect between the goals and reality of structural optimization persist today. In short, although structural optimization aims to generate new and exciting forms, most applications are limited to rather narrow problem spaces.
An important step forward in structural optimization was the development of shape optimization, or the determination of overall structural form as opposed to element sizes (Vanderplaats, 1982; Bennett & Botkin,
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 2: LITERATURE REVIEW
the automotive and aerospace industries, where an improved part would be used hundreds or thousands of times, yielding extensive savings, although there are also examples of shape optimization for trusses, sometimes called geometry optimization. Because it deals with overall form, shape optimization is more relevant to conceptual design than size optimization. An illustration of shape optimization for mechanical design is given in Figure 2.14.
Figure 2.13: 25-bar trussed tower with member cross sectional diameters and wall thicknesses chosen by an
optimization algorithm (Fox & Schmidt, 1966).
Figure 2.14: Shape optimization of a mechanical bracket supporting a rigid axel, with the objective of “minimizing
structural weight while assigning maximum allowable values to the von Mises stress” (Bennett & Botkin, 1986).
The third type of structural optimization used today is topology optimization, or the optimal connective arrangement of elements in a structure, developed numerically in the late 1980s (Bendsøe & Kikuchi, 1988;
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 2: LITERATURE REVIEW
Rozvany, 2001; Rozvany, 2007). This type of optimization can also be integrated with shape optimization and size optimization.
Specific methods have been developed to address each of the three classes of structural optimization problems, but in general they share a common formulation, described in the following subsection.
2.2.1 Optimization problem formulation
Formally, structural optimization is a numerical method of finding the best solution according to mathematically formulated functional requirements, or objectives, while conforming to mathematically formulated constraints. The solution is expressed in the form of numerical values for a design vector, , which represents a list of design decisions to be made – for example, nodal positions, material selections, cross sections – called design variables.
The objective function, ( ), is often a calculation of the weight or volume of the structure, such that a minimal-material structure can be found. However, this function can also consider stiffness, strain energy, deflection, dynamic behavior, or other quantitative goals, structural or otherwise. Objective functions are standardly given as functions to minimize, although maximization functions can easily be used, converted to standard form by minimizing the negative of the function. As indicated, the objective function is computed based on the values of the design vector. The optimal design vector will yield an objective function with the smallest possible value. The constraints, ( ) and ( ) , and the variable bounds, and , restrict the solutions according
to design or behavioral requirements. More specifically, design constraints can represent geometric or spatial requirements, constructability or fabrication limitations, or other functional considerations (Kirsch, 1981). Behavioral constraints set limitations on structural behavior, and include restrictions on performance metrics like internal stresses, deflections, or buckling capacity (Kirsch, 1981). Like the objective function, constraint functions are calculated based on the values of the design vector. A feasible design solution must not violate any of the constraints. It is also possible for a problem to be formulated without constraints; this is referred to as unconstrained optimization.
Together, the design vector, constraints, variable bounds, and objective function define a design space, or solution space, for a given problem. The dimension of this space is given as one more than the number of design variables, to represent the space of possible design vector values and their resulting objective, or performance, values. Structural design problems often have design spaces that are large and complicated. As an example, a simple structural optimization problem and its design space are shown in Figure 2.15.
The optimization problem is stated mathematically as follows: ( )
( ) ( )
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 2: LITERATURE REVIEW
gradient-based and heuristic, will be presented in brief overviews in the following subsections. As a whole, this approach to numerically computing the design vector to minimize the objective function according to constraints will be referred to as standard optimization in this dissertation.
2.2.2 Gradient-based optimization
In the broadest terms, gradient-based optimization works by finding the point in the design space at which the gradient or derivative of the objective function is zero, or where no improvement can be made without violating constraints. There are a wide variety of sophisticated algorithms that use this general approach, or at least make use of gradient information (Bertsekas, 1999; Papalambros & Wilde, 2000). This class of algorithms has the benefit of extensive theory, including guarantees that computation will converge to an optimal result at proven rates.
(a) (b) (c)
Figure 2.15: A simple 3-bar truss sizing problem (a); the variable and constraint plot (b); and the design space showing
objective function contours (c). (Kirsch, 1981).
However, there are limitations for using gradient-based optimization on so-called messy problems, which are the types often found in engineering and design. Some of the biggest issues include a lack of convexity, meaning that multiple local optima exist. Gradient-based approaches are unable to handle this on their own. Additionally, in engineering problems and structural design, the objective function is usually evaluated in such a way that derivatives do not exist, such as through black-box simulations. Gradient-based approaches must then work around this issue by approximating gradients through many expensive function evaluations, which can be both time-consuming and inaccurate.
2.2.3 Heuristic optimization
Heuristic optimization algorithms, sometimes called stochastic optimization algorithms, address these issues well. Instead of using gradient information in design space exploration, they incorporate randomness in a variety of ways. The most well-known method in heuristic optimization is genetic algorithms, a form of
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 2: LITERATURE REVIEW
evolutionary computing that uses Darwinian natural selection theory to grow and evolve populations of designs (Bentley, 1999).
These approaches are attractive for messy engineering problems, but also have important drawbacks. Unlike gradient-based methods, heuristic optimization approaches are not guaranteed to find the optimal solution, and may take a long time. However, they have been shown empirically to work well on the types of problems found in structural design, which usually have many local optima and undefined gradient information (Rayward-Smith et al., 1996).
2.2.4 Limitations of optimization in design
Despite the rich academic history of structural optimization, it has had relatively little impact on structural engineering in practice. (One important counterexample is the work of SOM’s William Baker and his collaborators, who have worked to apply structural optimization to real design projects in new ways (Stromberg et al., 2011; Baker et al., 2012). However, their efforts remain exceptional in the broader building engineering and design industries). Fundamentally, this can be attributed to an inherent difference in goals between optimization and the design of buildings. While optimization is necessarily a convergent process, or one in which an iterative and systematic algorithm converges upon a single solution, design is decidedly divergent. In design, it is recognized that a variety of significantly different yet suitable solutions can be found from a single starting point.
Moreover, the exercise of mathematically formulating objectives and constraints is difficult or impossible in the design of buildings. Many important goals and requirements are qualitative, or even subjective, such as visual impact, spatial experience, contextual fit, and overall architectural value. Since most structural design cannot occur in the absence of architectural goals, this presents a significant challenge.
In addition, the design process for buildings is often one of discovery: designers do not know all of their objectives and constraints at the beginning of the process, but develop them as they explore design possibilities. The designer’s interaction with the process of evaluation and iteration is key. In contrast, standard optimization is a relatively rigid and automated process in which goals and requirements must be enumerated completely at the start. Unlike the human design process, optimization on its own cannot handle unformulated objectives and constraints.
Another limitation of optimization in conceptual structural design is the design vector . Like the objectives and constraints, this list of design parameters must be fully established at the beginning of the process. Because the design vector completely defines design possibilities in a narrow way, it effectively predetermines the final design. This precludes optimization as an explorative approach able to generate design diversity, which is critical in conceptual design and should be included in a computational guidance-based tool.
From a more practical perspective, structural optimization can be very computationally time-consuming for realistically sized problems. This contrasts strongly with the rapid-fire brainstorming sessions typical of conceptual design, and seriously limits the use of optimization in an interactive design tool. Part of this issue is due to the high-powered structural analysis engines running behind optimization algorithms, which are arguably too detailed and sophisticated for the lower level of accuracy needed in conceptual design.
C. T. MUELLER | PH.D. DISSERTATION, 2014 CHAPTER 2: LITERATURE REVIEW
Finally, most structural designers lack intensive training in optimization, and there are few tools or approaches available that make optimization accessible to non-experts. Furthermore, optimization tools that do exist are often text-based or severely limited in their graphical displays, and often rely on piecing several pieces of software together. Human designers are necessarily highly visual, and can process and evaluate information much more quickly and fully when it is presented graphically. Therefore, in order to be useful for designers in practice, tools that use optimization should be easy to use, integrated, and strongly graphical.
2.3 Promising directions beyond standard optimization
Given the issues with standard optimization in conceptual architectural and structural design, it is necessary to look beyond the established approaches to find ways to bring computational design guidance to conceptual design tools. This section identifies three promising methodological directions that suggest remedies to the problems noted above, and which constitute the basis for the novel intellectual work of this dissertation. This section outlines background work and identifies needs for improvement in each area. A further and more detailed review of relevant theory and development in each area is given in the beginning of the corresponding chapter that presents novel work.
In addition to developing individual methodologies, this dissertation also addresses the need to combine disparate methods into integrated approaches for conceptual structural design. This section will also discuss existing work in the field of unified and integrated design environments for structural design.
2.3.1 Interactive design space navigation
As discussed previously, heuristic optimization is often preferable in real-world engineering problems due to its robustness and ease of use. Arguably, the use of randomness also approximates human creativity by allowing extraneous influences to enter the process of design discovery. However, on their own, heuristic optimization algorithms still have the problem of being too heavy-handed and reliant on a pre-formulated and quantitative problem setup.
Interactive heuristic optimization addresses this issue in a simple but compelling way: the designer is allowed to interact with the computer algorithm in deciding which designs to pursue in the iterative optimization process. The exact mechanics of the interaction depend on the specific heuristic algorithm chosen. In general, the interactive element allows the user to only partially formulate the design problem in a quantitative way, and to use unformulated or newly discovered objectives and constraints to make design selections.
A growing body of research in this field suggests that interactive heuristic optimization is a promising way to move beyond standard optimization for problems with qualitative goals, like architectural and structural design. Most notably, von Buelow (2008) has shown important results for the design of truss bridges and other simple structures using interactive evolutionary algorithms. Martini (2011) has also recently presented important work using a harmony search algorithm to produce multiple design results for a tied arch bridge. Examples from these contributions are shown in Figure 2.16 and Figure 2.17.