ÇRçmmciemerïti
Onbi±rgi'rurciuenpremiercetuiqrinousabméhvie,etnousprenÆ
en soin à cfiaquÆ instam± « fll±flJ{ », b cœment dè a;woi;r now dormé hfbi et b cowage
@our tertrim ce trwa;i[
run spéciab remercieri'ierï± pour +aMf jL guaDwhe » qui à proposé ce sujet, et qui m'a, eru:admé et sou;ümu par ses conseib, sa
Comp`réhension et ses emouffqgemmts.
Je tiens a;wsi à p'réserï±er ri'ies riemerâmen± a:ux::rræm6fies & jwry qui om±
accepté & juger rnon mo&stc trwa;i[
q]ow hs emebna;ms qri on± contri6ués à nome fbma,tbn.
Œ.qfl[®IJ4
I
1
1
1
I
I
1
1
I
I
I
I
I
I
I
I
I
]
I
dédie ce trœvœïl aux persomes
les plus chères dans ma vie:
A mes tiès chers parents.
A mes chers sœurs ei f ir`eres
A toute ma fiœmïlle.
A tous mes amles.
A tous mes coll`egues.
A tous les enseignants qui m'ont aidé de
pr`es ou de loin dq[ns mes études.
I
1
i
1
I
I
1
1
I
I
I
I
I
I
I
I
I
I
I
I
I
Sommaire
I
I
I
I
I
I
I
I
I
I
I
I
I
1
1
I
I
I
I
I
I
So-aire
Introduction GénéraleChapitre I
Modélisation et simulation de la machine asynchrone
1.1. Introduction
1.2. Description de la machine asynchrone triphasée
1.2.2. Principe de fonctionnement d'une machine asynchrone 1.3. Modélisation de la machine asynchrone
1.3.1. Hypothèses simplificatrices
1.3.2. Représentation du Modèle triphasée 1.3.3. Transfomation triphasé-biphasé
1.3 .3 .1. Transfomation de PARK 1.3.3.2. Transfomation de CLARKE 1.3.3.3. Transfomation de CONCORDIA
1.4. Ecriture du modèle biphasé de la machine asynchrone 1.4.1. Ecriture du modèle dans un repère arbitraire de Park 1.4.2. Choix du repère et défmition de référentiels
1.4.2.1. Référentiel lié au stator
1.4.2.2. Référentiel lié au rotor
1.4.2.3. Référentiel lié au champ toumant 1.4.3. Expression du modèle de la machine
1.4.4. Modèle non linéaire de la machine asynchrone
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
1
1
I
So-aire
Chapitre 11
Théorie de la commande
H.1 Introduction H.2. Présentation du problème11.3. Commande avec retour d'état à grand gain
11.4. Commande avec observateu à grand gain retou de sortie
11.5. Incoporation d'une action intégrale filtrée à la commande
11.6. Conclusion
Chapitre 111
Application de la commande a grand gain à la machine asynchrone
IH.1. htroduction
111.2. Application de la Commande à la Machine Asynchrone
111.3. Expression de la loi de commande
IH.4. Simulation de la commande
H.6. Conclusion
Conclusion Générale
Références bibliographiques
ANNEXE A : Caractéristiques de la machine utilisée ANNEXE 8 : Forme triangulaire canonique d'observabilité
ANNEŒ C : Observateu pou les systèmes à fome triangulaire
ANNEŒ D : Observateu à grand gain pou la machine asynchroneI
I
I
I
1
1
I
I
I
I
I
I
I
1
1
I
I
I
I
1
1
I
I
I
I
I
I
I
I
I
I
I
I
I
1
1
I
1
1
I
I
I
Liste des symboles
Liste des symboles
/
S,ra'b'c
c¥,4 d,g j*, J, q)sdbc.Prdbc usapgurap Zsap'lrap q)sap,q)rap Usdq>Urdq 1sdq,1rdq q)sdq'q)rdq Rs,Rr /S,/' Ls'Lr„sr
„
®s , ®r ® QLa fféquence du réseau d'alimentation
hdices indiquant le stator et le rotor respectivement
lndices indiquant les trois phases de la machine asynchrone
lndices indiquant le repère fixe lié au stator
lndices indiquant le repère toument avec le champ tournant hdices indiquant le repère toument avec la vitesse du rotor
Flux crée par les trois phases statoriques et rotoriques Tension statoriques et rotoriques dans le repère c¥ -4 Courant statoriques et rotoriques dans le repère c¥ - Æ Flu!: crée par le stator et le rotor dans le repère c¥ - ¢
Tension statorique et rotorique équivalent dans le rçpère d - q
couant statoriques et rotoriques dans le repère d - g
Flux statorique et rotorique équivalent dans le repère d - q
Résistance statorique et rotorique
lnductances propres statorique et rotorique
lnductance cyclique statorique et rotorique
hductance mutuelle entre une phase statorique et rotorique
lnductance cyclique mutuelle
Pulsation des comant statorique et rotorique
Vitesse électrique du rotor Vitesse mécanique du rotor
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
1
1
I
I
Liste des symboles
Oc 0 Gs Ôr
P
Cem Cr8
/vÉ/
Cr S Va ) 1'6 . ''c X X L) X LJ '.'a4 tJ ¢rŒÆ ÔS
J2/2
ZJC'
Position du rçpère de Park par rapport au stator
Position angulaire du rotor par rapport au stator
Position angulaire du repère d -g par rapport au stator
Position angulaire du repère c7 - g par rapport au rotor Nombre de paire de pôles
Couple électromagnétique Couple résistant
Le glissement de la machine asynchrone Coefficient de ffottement visqueux
Moment d'inertie du rotor
Coefficient de dispersion
Opérateu dérivé de Laplace
Les tensions des trois phases de réseau
Vecteur d'état
Le dérivé du vecteu d'état Vecteu d'état estimé
Les courant statorique estimé sur les axes c¥ - Æ Les flux rotorique estimé su les axes c¥ - Æ La vitesse de rotation estimée
L'unique solution de l'équation de Lyapunov
Matrice identité Matrice Jacobinen Couple de charge estimé
I
1
1
1
I
I
I
I
I
I
I
I
1
1
1
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
1
1
1
I
1
1
I
1
htroduction GénéraleIntroduction Générale
La machine asynchrone est un système dynamique qui pose un certain nombre de problèmes à cause de ses caractéristiques : système non linéaire, multivariable, fortement couplé
et en plus ses paramètres physiques peuvent varier sous l'effet themique et aussi sous l'effet de
la charge. A cela il faut ajouter que certaines variables ne sont pas accessibles directement à la
mesure, et que d'autres, leu mesure coûte chère ou affecte la fiabilité et la robustesse des
systèmes d'entrainements, notamment les flux et la vitesse de rotation, ce qui oblige l'utilisation
d'estimateus ou d'observateus d'état pou reconstruire ces variables non mesuables qui sont
nécessaires am procédures de commande et de surveillance des systèmes motorisés.
La mise en œuvre des lois de commande pou machine asynchrone doit faire face à des nombreuses difficultés, en plus de celles dormées précédemment, telles que les incertitudes de
modélisation, les bruits de mesures, les imperfections de l'onduleu et la complexité de certains
algorithmes de commande qui imposent l'utilisation de calculateus rapides. Par ailleurs, la
commande au minimum de capteu est devenue un sujet important et un champ attrayant de la perspective industielle où plusieus démarches ont été déjà proposé, commande backstepping,
commande avec mode glissante (SMC), commande non linéaire, commande avec mode glissante
d'ordre supérieu, commande vectorielle de la machine asynchrone avec mode glissant, et d'autres. Dans `ce contexte, les travaux présentés dans ce mémoire portent su l'élaboration d'un algorithme de conmande à grand gain de la machine asynchrone à base d'observateus dédié aux
systèmes non linéaires.
Nous avons orienté nos travaux dans plusieurs directions qui ont abouti aux contributions
suivantes : en premier lieu, une étude attentive de la modélisation de la machine asynchrone a été
faite. Elle nous a permis de comprendre et de foumir une description type du modèle non linéaire
de la machine. En deuxième lieu nous nous sommes intéressés au problème de commande, ce qui nous amène à la présentation de la théorie du control à grand gain avant d'aller à son application à la machine asynchrone. En troisième lieu nous présentons l'étude et l'application de ce type de control à la machine, commençant par l'élaboration de la loi de commande jusqu'à l'utilisation d'ui observateu susceptibles de foumir l'estimation de l'état qui sera intégré dans la boucle de commande, mais, ce dernière n'a pas fàit partie de notre travail, mais plutôt, un outil. Cela nous a permet de le présenter juste parmi les annexes.
Enfin, quelques remarques et perspectives sont domées dans la conclusion.
I
I
I
I
I
I
I
I
I
1
1
I
I
I
I
I
I
I
I
I
I
Chaptire 1
glÆodé [isa;tion et simutition
I
I
I
I
I
I
I
I
I
I
I
I
I
1
1
I
I
1
1
I
I
Chapitre l Modélisation et simulation de la machine asynchrone
1.1. Introduction
L'utilisation de la machine asynchrone est l'objet d'une évolution très rapide, elle est très exploitée dans de nombreuses applications en raison de sa robustesse et possibilité de lui
appliquée des commandes électroniques perfomantes.
La modélisation de la machine asynchrone est une phase primordiale dans son analyse. En
autre, elle est d'm apport précietK en pemettant d'me part de restituer me image de se que l'on peut observer expérimentalement et d'autre part de privoire des comportements de la machine
asynchrone plus variés que ceux de l'observation expérimentale.
Dans ce chapitre nous étudierons le modèle mathématique de la machine asynchrone triphasée
établi sous des hypothèses simplificatrices [1].
1.2. Description de la machine asynchrone triphasée
La machine asynchrone comporte une partie fKe constituée d'une carcasse à l'intérieue de
laquelle sont logés le circuit magnétique et le bobinage du stator d'une part, et une partie mobile
appelée rotor d'autre part, les deux parties sont séparé entre eux par entrefer pou limiter les
pertes magnétiques.
Le principe de fonctionnement du moteu asynchrone est basé su l'induction des couants dans le bobinage du rotor par un champ toumant dans l'entrefer dû à la circulation des courants polyphasés dans le stator. Ce champ tournant va créer un couple moteu qui s'exerce su les conducteus des courants induits, n provoque ainsi le démarrage et la rotation du rotor dans le
même sens que le champ toumant.
1.2.1. Eléments de constitution de la machine asynchrone
La machine à induction comprend un stator et un rotor constitués de tôles d'acier au silicium et comportant des encoches dans lesquelles on place les enroulements. Le stator est fixe; on y
trouve les enroulements reliés à la souce. Le rotor est monté su un axe de rotation su le quel
sont placés les enroulements qui seront accessibles de l'extérieu [2].
1.2.1.1. Le stator
l,e circuit magnétique est un empilement de tôles d'acier découpées, faisant apparaîffe les différentes encoches statoriques, on isole habituellement les tôles d'une mince couche de vemis ou de silicate de soude (figure 1.1). Le bobinage statorique est constitué de deux parties: les
conducteus d'encoches et les têtes de bobines. Les conducteus d'encoches pemettent de créer
dans l'entrefer le champ magnétique à 1'origine de la conversion électromagnétique. Quant aux têtes de bobines elles permettent la fermeture des courants en organisant leu circulation,
I
I
1
1
I
I
I
I
I
I
I
I
I
I
I
1
1
I
I
1
1
Chapitre 1 Modélisation et simulation de la machine asynchrone
l'objectif étant d'obterir une répartition des forces magnétomotrices et du fl" la plus
sinuso.i.dale possible dans l'entrefer, pou limiter les oscillations du couple électromagnétique.Figiire 1.1 : Photo du stator d'une machine asynchrone.
1.2.1.2. Le Rotor
Le circuit magnétique du rotor est constitué d'un assemblage de tôles ferromagnétiques rainurées. Dams les petits moteus, les tôles sont découpées dans une seule pièce et assemblées su ui arbre. Dans les plus gros moteurs, chaque alimentation est constituée de plusieuis sections montées su un noyau. On trouve deux types de rotor : bobiné ou à cage d'écueuil.
a. Rotor Bobiné
Les enroulements rotoriques sont locàlisés dans les encoches situées à la périphérie du rotor.
Ces enroulements sont bobinés de manière à obtenir un emoulement triphasé à « p » paires de pôle. Les bobinages rotoriques sont toujous couplés en étoile, et les trois bomes accessibles sont reliées à la carcasse du stator à l'aide d'un système constitué de trois bagues toumamts et de trois
balais fixes.
b. Rotor à cage
La grande majorité des moteurs sont à cages. Dans chaque encoche rotorique est placée une barre. Ces barres sont en cuivre pou les moteus de forte puissance, et en alliage d'aluminium pou les machines de frible et moyenne puissance. Elles sont réunies à chaque extrémité du rotor par des ameauK réalisant le court-circuit. L'enroulement rotorique ainsi réalisé n'est pas accessible à partir du stator.
I
I
I
I
I
I
1
1
1
I
I
I
I
1
1
I
I
1
1
I
I
Chapitre 1 Modélisation et simulation de la machine asynchrone
RLlu E nT m d hi llr 3
CdLH d éL. ui¥u.il € n
lluniiiiiumiïiu[£
Figure 1.2 : Photo du rotor d'une machine asynchrone.
1.2.2. Principe de fonctionnement d'une machine asynchrone
Le fonctiomement d'une machine asynchrone est basé su le principe de l'interaction électromagnétique du champ toumant crée par le couant triphasé foumi à l'enroulement
statorique par le réseau, et des courants induits dans l'enroulement rotorique lorsque les
conducteus de ce dernier sont coupés par le champ toumant. De cette façon le fonctionnement d'me machine asynchrone est analogue à celui d'un transfomateu : 1e stator étant comparable à
l'enroulement primaire et le rotor à l'enroulement secondaire qui, dans le cas général, peut
toumer à la vitesse de rotation donnée par le rapport suivant:
q -± (1.1,
P
L'interaction électromagnétique des deux parties d'une machine asynchrone (sans collecteu)
n'est possible que lorsque la vitesse du champ toumant ( #] ) diffère de celle du rotor ( # ), c'est-à-dire, lorsque#±n , car dans le cas contraire, c'est-à-dire lorsque7!=n, le champ serait
irmobile par rapport au rotor et aucun courmt ne serait induit dans 1'enroulement rotorique. Le
rapport :
g -- nT
„1est appelé glissement d'une machine asynchrone [2] et [3].
(1.2)
I
I
1
1
1
I
1
1
I
1
1
I
I
1
1
I
1
1
1
1
I
Chapitre l Modélisation et simulation de la machine asynchrone
1.3. Modélisation de la machine asynchrone
1.3.1. Hypothèses simplificatrices
Afm de simplifier la modélisation de la machine, on va admettre les hypothèses simplificatrices suivantes :
> entrefer constant.
> effet des encoches négligé.
> distribution spatiale sinuso.i.dale des forces magnétomotrices d' entrefer.
> circuit magnétique non saturé et à peméabilité constante. > pertes fenomagnétiques négligeables.
> l'influence de l'effet de peau et de l'échauffement su les caractéristiques n'est pas prise
en compte.
Pami les conséquences importantes des hypothèses, on peut citer :
> l'additivité des flux.
> la constance des inductances propres.
> 1a loi de variation sinuso.i.dale des inductances mutuelles entre les enroulements
statoriques et rotoriques en fonction de l'angle électrique de leus axes magnétiques.
1.3.2. Représentation du Modèle triphasée
On a représenté au stator trois bobinages, dont les axes sont décalés de 120°, et trois autres au rotor, parcourus chaque fois par un système de courants triphasé. Par convention, les bobinages sont alimentés par un système de tentions triphasé sinusoi.dal direct [4].
On peut considérer la machine asynchrone triphasée comme rçprésentée par les bobinages de la figue (1.3).
Les enroulements des trois phases statoriques et des trois phases rotoriques dans l'espace peuvent être rçprésentés comme indiqué su la fig.1.3, les phases rotoriques sont court-circuitées su elles mêmes. 0 est l'angle électrique entre l'axe de la phase Æ statorique et la phase ¢ rotorique.
1
I
I
I
1
1
I
I
I
I
I
I
I
I
I
I
I
1
1
I
I
Chapitre l Modélisation et simulation de la machine asynchrone
Figure 1.3 .. Modèle d'une machine asynchrone triphasée.
La loi de faraday permet d'écrire :
v-Ri+d9P-d'
1.3.2.1. Au stator
L'écritue matricielle pou les ftois phases statoriques est résumée par ces écritures [5].
a. Equation é]ectriques
Les équations électriques sont données par :
["Æri]-[RS][z.J+i[¢£J
Cette notion est 1'écriture condensée de :
La résistance statorique étant la même pou les trois phases: R„ = R„ = R„ = Rs
b. Equation magnétique
Les équations magnétiques sont données par :
(1.3)
(1.4)
(1.5)
1
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
1
1
Chapitre 1 Modélisation et simulation de la machine asynchrone
[¢#bc]=[/s][Z.Mbc]+[M„][Z.J
Cette notion est l'écriture condensée de :
cos(¢ cos(O+¥) cos(O-¥)
cos(O-¥) cos(O) cos(O+¥)
cos(O+¥) cos(G-¥) cos(O)
(1. 6)
(1.7)
1.3.2.2. Au rotor
L'écritue matricielle pou les trois phases rotoriques et résume par ces écritures, condensée [5].
a. Equations électriques
Les équations électriques sont données par :
[#ric]=[Rr][Z.ri]+#[¢ric]
Le rotor étant en court-circuit, ses tensions sont nulles.
Der"ê"eRru=Rrb--R„=Rr
b. Equation magnétiqueLes équations magnétiques sont données par :
[¢ri*]=[/r][z.nric]+[M„][z.sh
Cette notation est 1'écriture condensée de :
Sachant que :
cos(O) cos(O-¥) cos(O+¥)
cos(O+¥) cos(O) cos(O-¥)
cos(G-¥) cos(O+¥) cos(O)
(1.8)
(1.9)
(1.10)
(1.11)
I
I
I
I
I
I
I
I
I
I
I
I
I
I
1
1
I
I
I
I
I
Chapitie 1 Modélisation et simulation de la machine asynchrone
[""]-[„"r=„"
cos(O) cos(O-¥) cos(O-¥)
cos(O-¥) cos(O) cos(G-¥)
cos(O-¥) cos(O-¥) cos(O)
(1.12)
Cette demière matrice est nommée inductance mutuelle entre le rotor et le stator [5].
1.3.3. Transformation triphasé-biphasé
La transfomation des axes consiste à transfomer des équations triphasées de modèle de la machine asynchrone à des équations équivalent dans un système biphasé (fK: e ou toumant) dont l'objectif est la simplification. Ils existent plusieus transfomations: Park, Clark, Concordia [6].
1.3.3.1. Transformation de PARK
A cause de la complexité et la non linéarité des équations précédentes il est difficile de
simulerlesystème,alorsilestindispensabledetransfomerlesystèmetriphasééquilibré(a,Z},c) en m système (d, q) par la transformation de Park. A condition de conserver la force
magnétomotrice et la puissance instantanée [5].
Figure 1.4 : Représentation de la machine asynchrone dans le repère biphasé.
Le passage avec la transfomation triphasé biphasé sera écrit :
I
I
I
1
1
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
Chapitre 1 Modélisation et simulation de la machine asynchrone
donc
[x¢.]-p(G)[Xati]
(1.14)
avec
p¢)-#
cos(¢ cos(O~¥) cos(O+¥)
-srio -sri(O-¥) -sin(G+¥)
111
7Ï2, 7Ï2, ~Jï2
L'inversion de la matrice p(6)) est donnée par:
Lp(o)T'-R
cos(O)cos(o-¥)
cos("¥)
-sin(O)1.3.3.2. Transformation de CLARH
Le passage d'ui système triphasé czGc à un système biphasé de CLARKE c¥Æ s'écrit:
iliiiËil
C'estàdire LrŒ,J=C23LX|Avec :
C23=3[: *`,2 _-J;`,22]
Le passage inverse s'écrit:
(1.13)
(1.15)
(1.16)
(1.17)
1
I
I
I
1
1
I
I
1
1
I
1
1
I
I
1
1
I
I
1
1
Chapitre l Modélisation et simulation de la machine asynchrone
[jrd=C32Lr¢,J Avec: C32
10
-L12 Jï312
-112 -Jï312
(1.18)
Le choix de la matrice de passage non nomée (Clarke) est pratique en commande où l'on traite des grandeus dg .Cela pemiet, par exemple, d'apprécier directement le module du courant absobé par le moteu [7] .
1.3.3.3. Transformation de CONCORDIA
Le passage d'un système triphasé abc à un système biphasé c¥¢ s'écrit:
ilEŒËn
Donc: LXŒ,J=r23LrÆbc]Avec :
r23-#[: :`,: __t`,22]
Le passage inverse s'écrit :
[x4k]=r32L¥Œ4JDonc:r32=Jz7ï 10
-1/2 Ji3/2
-112 -Jï312 (1.19) (1.20) (1.21)Le choix d'une matrice norinée (Concordia) est souvent utilisé pou des raisons de symétrie de transfomiation directe et inverse [7].
1.4. Ecriture du modèle biphasé de la machine asynchrone 1.4.1. Ecriture du modèle dans un repère arbitraire de Park
En utilisant la transfomation de Park, le modèle triphasé de la machine asynchrone domé par
les équations les (1.22), (1.23), (1.24), et (1.25) peut être domé en biphasé comme suit :
a. Equations électriques
Les équations des tensions statoriques et rotoriques deviennent:
(1.22)
I
I
1
1
1
I
I
I
1
1
I
1
1
I
I
I
I
I
I
I
I
Chapitre 1 Modélisation et simulation de la machine asynchrone
[:] -[Ror R?,][:.::]+#]+[(®cO-®, -`"co_®'][:;:]
b. Equations magnétiquesL'écritue des flux statoriques et rotoriques devient:
[#-[t £Os][:-::]+[ï M[::]
[#-[t £O,][:.:+[ï M[:.::]
Ou: (1.23) (1.24) (1.25)Ls~-ls-M,Lr--lr-M,M=%Msr,æs--d4£;,ær=d4£:,œ=%,æ=pç2flc=d%
d'
c. Equation mécaniqueL'étude du comportement de la machine asynchrone aux différents régimes de fonctionnement
en particulier, le régime transitoire met en évidence l'équation du mouvement qui est définie
corme suit :
c--cr--Jd#+f-Q
(1.26)1.4.2. Choix du repère et définition de réfiérentiels
Jusqu'à présent, nous avons exprimé les équations et les grandeurs de la machine dans un
repère (dg) qui fait m angle électrique Os avec le stator et qui fait également m angle
électrique Or avec le rotor, mais qui n'est pas défini par ailleus, c'est-à-dire, qu'il est libre. Le référentiel est choisi en fonction de l'étude à réaliser. Dans la pratique il existe tiois types de référentiels.
1.4.2.1. Référentiel lié au stator
Ce système d'axe est immobile par rapport au stator [5].
Dan ce cas :
I
I
I
I
I
I
I
I
1
1
1
1
I
I
I
1
1
I
I
I
I
Chapitre l Modélisation et simulation de la machine asynchrone
o-oet:=;) et ®c-#-o
Ce référentiel est choisi lorsqu'on désire étudier les variations de la vitesse de rotation, associé ou non avec des variations de la fféquence d'alimentation. Le modèle sera écrit :
Les équations électriques prennent la fome suivante:
(1. 27)
Iies équations magnétiques deviennent:
[;::] -[£os £Os][:.ri[ï M[:::;]
(1.28)
(1.29)
(1.30)
1.4.2.2. Réfiérentiel lié au rotor
Ce système d'axe est immobile par rapport au stator, et dans ce cas :
o-oet:=;) et ®c-#-o
Ce référentiel est intéressant dans les problèmes ou la rotation est considérée comme
constante, par exemple pou l'étude des contraintes d'un court-circuit.
Les équations électriques prennent la forme suivante:
]+#;]+[: _o®][:;]
(1.31)(1.32)
I
I
I
I
I
I
I
I
1
1
I
1
1
I
I
I
I
I
I
I
I
Chapitre 1 Modélisation et simulation de la machine asynchrone
I,es équations magnétiques restent les même du repère lié au champ toumant:
[:;;]-[£os £OJ[:+[ï Æ;:]
[;;]-[£or £O,][::;]+[ï M[:.:;]
1.4.2.3. Référentiel lié au champ tournant
Ce système d'axes toume avec la vitesse de champ électromagnétique @s crée par les emoulements du stator, dans ce cas:
Oc=Ose{:=:}et®c=#=®s
Ce référentiel est le seul qui n'introduise pas de simplification dans la fomiulation des équations. n est très intéressant dms les problèmes ou la fféquence d'alimentation est constante, ce qui simplifie considérablement les calculs. 11 est également utilisé dans les problèmes d'alimentation des moteurs asynchrones par convertisseur statiques de fféquence lorsque l'on
veut étudier la fonction de transfert du moteu relativement à des petites perturbations autou
d'm régime domé.
Les équations électriques prennent la fome suivante:
[:] -[Æ;r Rï[:::]+#:]+[(®,0-®, -`®so_®'][:::]
Les équations magnétiques deviennent:
[:;:] -Fos £OJ[:.::]+[ï Æ:'::]
[:::] -[£or £O,][::::]+[ï M[:'::]
(1. 33)
(1. 34)
1
I
I
I
I
I
I
I
1
1
I
I
I
I
I
I
1
1
I
1
1
Chapitie l Modélisation et simulation de la machine asynchrone
1.4.3. Expression du modèle de la machine
Le modèle de la machine asynchrone sera exprimé [1], dans notre cas, dans le rçpère statique(c¥Æ), et nous allons choisir le flux rotorique ¢„ , ¢„ comme et le courant statorique z.„ , z.„ variables d'état, pou cela nous devons effectuer une recherche des équations différentielles qui décrivent ces deux variables et cela à partir du modèle donné par les équations
(1.27), (1.28), (1.29), et (1.30).
• Equations des flux rotoriques ¢ra . ¢rp
à partir de (1.28) et (1.30) :
_#
notant que cz7 = pQ , on écrit donc :
M%isa-Ei:rpra-œpfl
isp+œpra-¥prp
ÀÆRr
Lr .p ',u Lr
• Equations des courant statoriques z.„ , z-s, À partir de (1.29) et après dérivation :
de (1.27) on écrit :
#:]-[_:s _:s][-:;]+[: :][::;]
En dérivant (1.36), on obtient : (1.35) (1.36) (1.37) (1.38) (1.39) Page 14I
1
1
I
I
I
I
1
1
I
I
I
I
1
1
I
I
I
Chapitre l Modélisation et simulation de la machine asynchrone
En remplaçant les équations (1.39) et (1.40) dans (1.38) :
-yisa+fr+bQprp
Æ
-risp-kppra+frprp
En plus, l'expression de la vitesse est :
d#-#,praisp-prpisa,-%Q-C5
dt JL_-"u" ''pbu' J J
(1.40)
(1.41)
(1.42)
Donc à partir de les équations (1.37), (1.41) et (1.42), on obtient un système non linaire d'ordre
cinq peut être s'écrit sous la fome :
=`==`=:`EEEE
Æ-yisa+frpra+kdlprp
Æ-risp-kftpra+frprp
„.1
-frisa-frprœ-pÇ2prp 1Mfrisp+pQpra-±rprp
#tpratspflrptsaj_%Q_Cj
/
Les paramètres qui interviens dans le modèle de la machine sont:
Tr--±,o-L-#,y-=+#'k--
„
dLrLs
(1.43)
1.4.4. Modèle non Hnéaire de la machine asynchrone
Le modèle utilisé dans ce chapitre est un modèle de Park classique pou lequel nous exprimons les grandeus électriques dans un rçpère dit "rçpère fixe ou lié au stator" [8], le modèle d'état de machine asynchrone (1.43), dans ce référentiel est une représentation non
linéaire de la fome:
I
I
I
I
I
I
1
1
I
I
1
1
I
I
I
]
1
1
1
]
I
Chapitre l Modélisation et simulation de la machine asynchrone
-/(x)+g(x)"
Avec : Jr= ZJ¢ Zs, ¢,¢¢,,
Q
Æ-yisa+frpra+kftprp
Æ-yisp-kftpra+frprp
„.1
•frisa-f:pra-pÇ2prp
1Mlrisp+PQpra-±rprp
#(Pratsp-Prptsa)-
f-ç2-C-JJ x : Le vecteu d'état. # : Le vecteu de commande./(x) : La fonction dynamique du système. g (x) : La matrice de cormande.
Ce modèle peut être réécrit sous une autre fome plus condensé de la manière suivante :
-yis+frpr-bçu2Pr
„.1
-fris-frpr+pÇUTpr
p#,i:JTpr-%Q-CÏ
JJ
(1.44) (1.45) Avec : [Z.s]=[;.::], [¢,]=[;;;], [«s]=[#:] ef /2=[: -oL]1.5. Simulation du modèle d'état et interprétation des résultats
La simulation numérique du modèle mathématique (1.44) de la machine asynchrone à rotors
bobinés utilisés, perinet d'avoir une idée globale et correcte su leus perfomances. La machine
asynchrone utilisée est une machine de puissance 1.1 KW7, [1]. dont les paramètres sont donnés
dans l'annexe .4 , la simulation est fait dans un repère biphasé de Park liée au stator pou des
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
1
1
I
I
1
1
Chapitie 1 Modélisation et simulation de la machine asynchrone
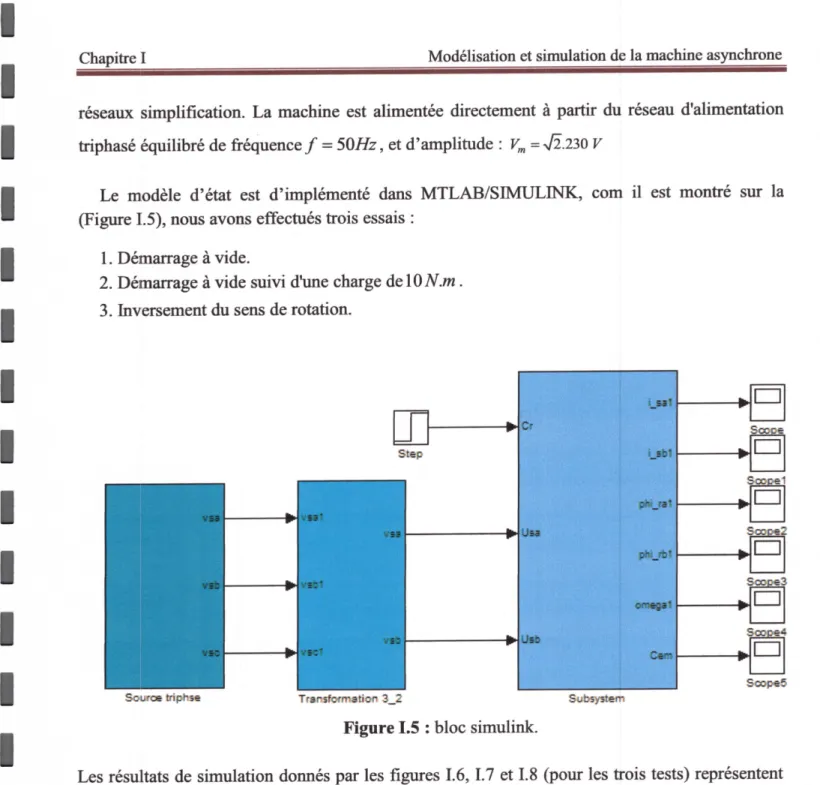
réseauK simpüfication. La machine est alimentée directement à partir du réseau d'alimentation
triphasé équilibré de fféquence / = 50fJz , et d'amplitude : frm = J£.23o y
Le modèle d'état est d'implémcmté dans MTLAB/SIMULINK, com il est montré su la
Œigure 1.5), nous avons effectués tiois essais : 1. Démarrage à vide.
2. Démarrage à vide suivi d'une charge de 10JV.m .
3. Inversement du sens de rotation.
î._--ËEÏHËE-E
Sburœ m.phæ Tiansft-timt 3_2
Figure 1.5 : bloc simdink.
Subîyst-Les résultats de simulation donnés par les figures 1.6, 1.7 et 1.8 ®our les trois tests) rçprésentent l'évolution des grandeuris fondamentales de la machine asynchrone : le courants statoriques (z.m ) ,
le modde de flux (||¢r||) , la vitesse (Q) et le couple électromagnétique (Cfl ) .
I
I
1
1
I
I
I
1
1
I
1
1
I
I
I
I
I
Cmapitre 1 Modélisation et simulation de la machine asynchrone
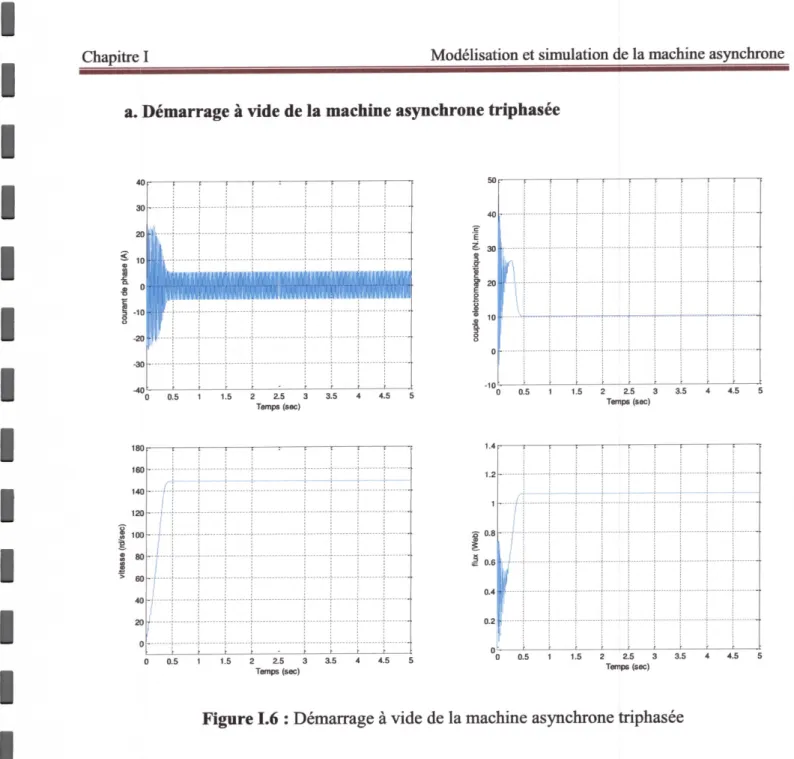
a. Démarrage à vide de la machine asynchrone triphasée
0.5 1 1.5 2 2.5 3 Tcmps (sœ) 0 0. 5 1 1.5 2 2.5 3 3.5 4 4.5 5 Temps (sœ) 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Tomps (eoc) 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Tmps (se€)
Figure 1.6 : Démamage à vide de la machine asynchrone triphasée
L'allue de la vitesse présente des oscillations dans les premiers instants de démarrage suivi par un accroissement presque linéaire, jusqu'à la valeur de synchronisme après un temps d'envions 0.25 s. Elle montre aussi la possibilité de ffeinage et d'inversion du sens de rotation en pemutant entre les commandes de deux phases.
Le couple électromagnétique est fortement pdsateu dans le régime transitoire, 11 présente au
démarrage des oscillations très importants avant se stabiliser à la 10Nm.
Le courant statorique présente au démarrage des oscillations successives autour de zéros
d'amplitude maximale de 22A jusqu'à l'instant O.2s.
I
I
1
1
I
I
I
I
I
I
I
I
I
I
I
1
1
I
Chapitre 1 Modélisation et simulation de la machine asynchrone
b. AppHcation d'une charge en régîme permanent
0.5 1 1.5 2 2.5 3 T®mp9 (Sœ) 0 0.5 1 1. 5 2 2.5 3 3.5 4 4.5 5 Temp6 (sec) 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 T®mps (sœ) 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Tmœ (§ec)
Figure 1.7: Démarrage en plaine tension suivi d'une application d'un couple résistant
Cr = 10N." à l'instant f = 2.5 sec .
Lors de 1'application de la chaffge nous remarquons une décroissance de la vitesse rotorique jusqu'à la valeu 150#d/sec qui se traduit par un glissement. On conclut que la vitesse chute lorsqu'on charge la machine.
Après l'application du couple résistant l'amplitude maximale des oscillations du courmt statorique prend une valeur supérieue à la valeu où le fonctionnement est à vide.
Modélisation et simulation de la machine asynchrone Chapitre 1
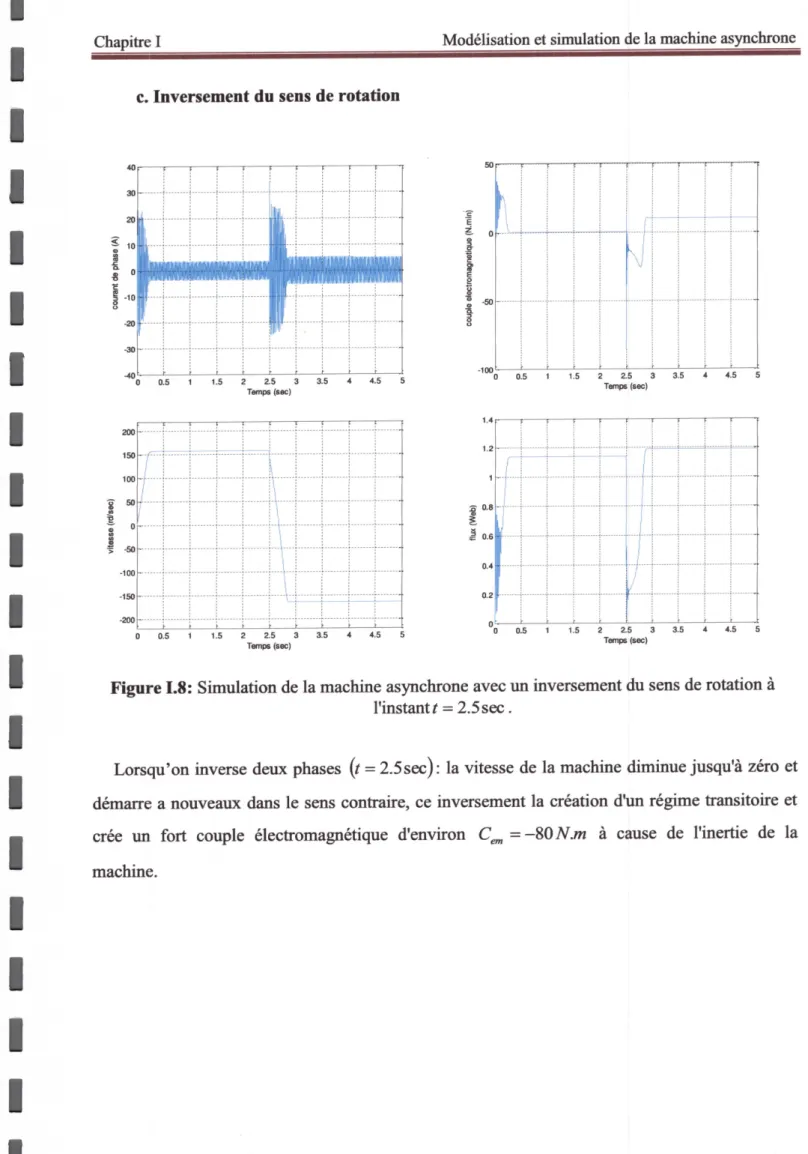
c. Inversement du sens de rotation
I
1
1
I
I
1
1
I
I
I
I
I
0.5 1 1.5 2 2.5 3 Tcmp8 (8oc) 0 0.5 1 1.5 2 2. 5 3 3.5 4 4.5 5 T"p (sec) 0.5 1 1. S 2 2.5 3 3.5 4 4.5 5 Temps (sœ) 0.5 1 1. 5 2 2.5 3 3.5 4 4.5 5 TemB5 (Sœ)Figure 1.8: Simulation de la machine asynchrone avec un inversement du sens de rotation à
l'instant f = 2.5 sec .
Lorsqu'on inverse detK phases (f = 2.5sœ) : la vitesse de la machine diminue jusqu'à zéro et
démane a nouveaux dans le sens contraire, ce inversement la création d'un régime transitoire et crée un fort couple électromagnétique d'environ Cc" =-80N.m à cause de l'inertie de la
machine.
I
I
I
1
1
I
1
1
1
I
I
1
1
1
I
I
I
I
I
I
I
Chapitre 1 Modélisation et simulation de la machine asynchrone
1.6. Conclusion
Dans ce chapitre, nous avons présenté le modèle de la machine asynchrone triphasée établi
sous des hypothèses simplificatrices. L'application de la transfomation du PARK nous a pemet
d'avoir un modèle biphasée équivalent de cette machine.
Nous avons réalisé l'alimentation de la machine asynchrone par un réseau triphasé à fi.équence fixe et tension constamte afm de voire le comportement de la machine sous différentes contraintes, cela à travers une simulation Matlab.
La remarque la plus importante est que la vitesse de la machine n'est pas du tout contrôlée, cela nous conduit à l'introduction d'une loi de commande afin de commander la vitesse.
1
1
I
I
I
I
I
I
I
I
I
1
1
I
I
I
1
1
I
I
I
Cha,ptire 11
qhéorie de h comma;nde
1
I
I
I
I
I
I
I
I
1
1
I
I
I
I
1
1
1
I
I
I
Chapitre H Théorie de la commande
11.1 Introduction
A propos de la commande de la machine asynchrone, la littératue regorge de livres et de publications qui montrent plusieus stratégies importantes de la commamde. Débuté par le premier dispositif, la cascade hyposynchrone dçpuis 1969 par Mikhail Kostenko et Ludvik Piotrovski à Moscow [9], qui pemet de réduire la vitesse d'une machine asynchrone avec un
rotor bobiné duquel on retire de l'énergie pou la réinjecter au réseau d'alimentation, ce qui
augmente le glissement réduisamt la vitesse et sans affecter le rendement. Un autre dispositif plus simple s'adapte avec tous les types du rotor et réalisé par la loi connue de la commande scalaire
O//f = Constmte) pou contrôler des variables scalaires, la vitesse se varie en fonction de la
fi.équence d'alimentation. Comme il ne contrôle pas le couple moteur, m de ses inconvénients, il
n'est pas perfomant dans le régime transitoire.
A la différence de la commande scalaire, d'autres dispositifs ont été conçus pou la
commande vectorielle proposée par Blaschke depuis 1971 [10]. Cette commande est m teme générique désignant l'ensemble des commandes contrôlant des variables vectorielles. La
commande par contrôle direct de couple (DTC) pemet d'obtenir de meilleues perfomances
lors des régimes transitoires [11]. Cette commande inclut le contrôle du couple afin d'obtenir de
meilleues perfomances lors des régimes transitoires.
I-t cette demière décemie, la commamde sans capteurs est devenue un sujet important et
ui champ attrayant de la perspective industrielle. En effet, de l'implémentation des capteurscomme les capteus mécaniques de vitesse (encodeus, resolvers ,... ) ou les capteus de champs magnétiques dms les circuits magnétiques, résulte parfois un manque d'espace, une réduction de
robustesse des systèmes ou de nouvelles influences extemes comme le bruit de mesures ou le bruit induit transporté par les connexions.
Les avantages de la cormande sans capteur ont attiré l'attention en particulier dans les domaines de la commande de la machine asynchrone, où beaucoup de travaux étaient fàits à
cette égard [12] et d'autres. La plupart de ces trava" met en évidence la nécessité d'avoir des
observateus ou estimateus des variables d'état qui remplacent les capteurs pou la commande avec retou d'état ou retou de sortie. D'autre travaux plus récents se sont intéressés à la commande sans capteurs de la machine asynchrone, et on trouve que le remplacement des capteurs par des observateus ou estimateus est toujous un bon moyen pou femer la boucle de
commande sans affecter la stabilité. Plusieus démarches de commandes ont été proposé,
I
1
1
I
I
I
I
I
I
I
I
I
I
I
1
1
1
I
1
1
Chapitre H Théorie de la commande
commande Backstepping [13], la commande par mode glissant (SMC) combinée avec correcteur intégral non linéaire [14], la commande avec mode glissant d'ordre supérieur [15], et d'autres...
La commande de la machine asynchrone sans capteu dans ce chapitre est faite dans les coordomées (Œ,Æ), avec un contrôleu à grmd gain proposé et adopté pou la classe des
systèmes non-linéaires. Dans ce chapitre, le problème de commande est présenté dans le premier
paragraphe, en suite, la stratégie de commande grand gain avec l'incorporation de l'observateu est étudiée, avant que, me application de la présente stratégie sera portée su le modèle de la machine asynchrone pour montrer ses performances dans le prochaine chapitre afm de voir
1'efficacité et 1'importance de cette stratégie.
11.2. Présentation du problème
Considérons la classe suivante des systèmes non linéaires
± - f (x) + g(xfi,
J,-Œ-x',
X=
' f
(x)-/'(JC)
/2(Jf)
et c-(/, 0 ,... 0,)la sortie }7 € RP , les variables x € R" etxÆ € RP ,1'entrée zÆ € RS .
SoitÆ(f)=}J=]f`(f)€RPmefonctionsuffisammentdérivabledépenddesvariablesd'étatquine sont pas forcement accessibles à la mesure.
La synthèse de la loi de commande nécessite les hypothèses suivantes:
H:ypoMhÀese H.1 .. Elle existe une transfiormation ® qui est un difféomorphisme défini comme
suit :
•-(::):R"-R--®(x,-(;::;t:))
qui met le système (T1.L) sous la f iorme..
(11.2)
I
1
1
I
I
I
I
I
I
1
1
I
I
I
I
1
1
1
I
I
I
Chapitre 11 Théorie de la commande
Z=.4,z+B,(G(Ç,z)w+g(Ç,z))+y(z) €-„(Ç,z,")
J, - Cz - zl
Z--z' z2 z3 z,y(z)-y'(zl)
y2(zl,z2) y2(z`,z2,z3)yr(z)
et cr =(/p Op ... Op). Avec:les variables zk €T+P et Ç€FT-rp , avec k=1 ,..., r , g(€,z)€RP et G(€,z) est une matrice de
dimension pxm avec p<_m . La matrice v(z) a une structure triangulaire par rapport à x .
Le problème de commande considéré consiste en une pousuite asymptotique parfaite de la trajectoire de sortie z] (f) que l'on notera {z; (f)} € RP , soit:
!±(zl(,,-zà(f,)-O. (11.4)
Compte tenu de la structue du système (11.3), il est possible de domer la dérivée de la trajectoire d'état de référence notée {zd(f)} obtenue avec la séquence d'entrée associée {#d(f)} qui correspond à la trajectoire désirée {z; (/)} . Cela pemet de définir le modèle de référence (désiré) comme suit:
2d=14rzd+Br(G(ç)Zd)Wd+g(€)Zd))+y(Zd)>
Où zd=
(11.5)
€RP est l'état de référence du modèle, notons que, les composantes
z5 €RP,Æ = 2 ,..., r aussi comme l'entrée associée wd €Rm peuvent êtres calculées à partir du système (11.5) comme suite :
I
I
I
I
I
I
I
I
I
1
1
I
I
I
I
I
1
1
I
I
I
Chapitre ll Théorie de la commande
zZ = 2£_] _yÆ_L tzà ,..., z;_] , pou Æ e [2 ,..., r]
#d=(G(Ç)Zd))+(Zdr-g(€,Zd)).
Remarque 11.1 : La matrice (G(€,zd))+ rçprésente l'inverse à droite de la matrice G(€,zd) qui
estdonnéepar(G)+=G7(GGr)-].
Coinme zd est suffisamment dérivable, il est possible de déterminer par récurrence l'entrée et l'état du modèle de référence (c'est à dire wd et z; pou Æ = 1 ,..., r) en fonction des dérivées par
rappoftautempsdelatiajectoriederéférence(c'estàdriez£(.)=#pou[.€[1,...,r-1]),
corme suit :
z;-ÆÆ(z;,zà('),zà(2),...,z;`Æ-1))pourÆ€[1,...,r]
Les fonctions ÆÆ serons domées par:
• pour Æ -1 :
¢l(z;)-zà
• pour Æ = {2 ,..., r} :
(11.7)
4t(z;,zàtL',...,zàtÆ-]')=Ë#(z;,...,zàt">)zàtJ+]>-yt-i(4i(z;),...,¢Æ-i(z;,z;tiJ,...,z;t*-2>))
En effet, d'après l'équations (H.6) on a:
z5 -z5-' -yÆ-' (zà ,..., zf-l) pou Æ € [2 ,..., r]
=£(Æt(z£,z;ti>,...,z£tÆ-i]))_yÆ-i(z;,zàti>,...,z;-i)
=Ë#(z£,...,z£tÆ-2j)z£tHÆ-i(4i(zà),...,¢Æ-i(z;,z;ti>,...,z:tÆ-2>))
Le problème de pousuite parfaite en sortie donné par l'équation (11.4) peut être alors étendu au problème de poursuite de trajectoire d'état défini par :
I
I
I
I
I
I
I
1
1
I
I
I
I
I
I
I
I
I
I
I
1
Chapitre H Théorie de la commande
!± e(f)=O où e(f) = (z(f)-zd(f)) (H.8)
Et ce dernier peut être interprété comme un problème de régulation pou le système d'eireu
obtenu à partir des équations du système (H.3) et du modèle de réfiérence (H.5) : é=4e+Br(G(Ç,Z)W-G(€,Zd)Wd)-B,(8(€>Z)-8(€>Zd))+y(Z)-y(Zd)
€-„(Ç,z,")
En remplaçant z par e+ zd , le système (11.9) s'écrit alors
é =4e+B,(G(Ç,e+zd)w-G(Ç,zdp,)-B, (g(€,e+zd)-g(¢,Zd))+y(e+zd)-y(Zd) (II.10a)
€ = 7(Ç,e+Zd,W) (H.10b)
11.3. Commande avec retour d'état à grand gain
On peut suggérer me structure de loi de commande avec retou d'état du type grand gain, comme dans [16] et [17] compte tenu des observateus du type grand gain proposés dans [18],
soit :
« = (G(€,z))+(G(€,Zd)%d+V(e))
v(e)=-Kc(/'B,rËA,e)
où e représente l'erreu de pomsuite z -zd , la matrice A, est une matrice diagonale donnée en fonction du scalaire strictement positif / par :
A,-d,.¢g(J,tJp,....,7±Jp)
1a matrice g est la solution de l'équation algébrique de Lyapmov suivamte:
_s+A:_S+_SAr___SBrB:Ë
et Kc : RP ri RP est me fonction bomée satisfaisant la propriété suivante :
V@€Qona:@rKc(@)2±@r4p,r@
où Q est un compact quelconque de RP .
(11.12)
(H.13)
(H.14)
I
I
I
I
I
I
I
1
1
I
I
I
I
I
I
I
I
I
I
1
1
Chapitre 11 Théorie de la commande
Remarque 11.2 : Du fait que l'équation algébrique de Lyapunov :
S+A:S+SA,-C:C (11.15)
où C, = B,r , admet me solution unique S symétrique et positive définie [19], il en sera de même
pou l'équation algébrique (11.13), qui a une solution unique Ë symétrique et positive définie , elle peut être donner comme suit :
-s=TS-lT
Utilisant quelques manipulations algébriques] , on obtient: BrrË=CS-]r=[C;Jpcg9-]Jp...C;Jp]
Cette loi de commande avec retou d'état, domée par l'équation (11.11), réalise bien l'objectif de pousuite considérée (11.8) comme l'indique le résultat fondamental suivant:
Théor`eme T1| .. Sous l'hypothèses 3.1, 1 'erTeur de poursuite e(t) du système (T1.8) généré par la séquence d 'entrée donnée par (T1.11)-(T1.14) converge exponentiellement vers zéro pour des valeurs de 1 relativement grandes.
Démonstration: La démonstration du théorème est similaire à celle donnée par [16], en tenant compte des équations (11.10) et (11.11), l'équation d'état du système avec retou d'état s'écrit
co-e suit :
é=4e+Brv(e)+B,(g(Ç,Z)-g(Ç,Zd))+y(e+Zd)-y(Zd)
~-Are-BrKc(lrB:ËAie)+Br(8(¢9Z)-8(¢9Zd))+V(Z)~V(Zd)
Soit le changement de variable ë = A, e . Compte tenu des identités A, 4A7] = / 4 ,
AjBr=7±Brete=A;[ë,Sondérivéàpeutêtieexprimépff:
_e-A,è
(11.16)
1
I
I
I
I
I
I
I
I
1
1
I
I
I
I
I
I
I
I
1
1
Chapitre 11 Théorie de la commande
=A,Are~AiBrKc(1rBrTÉAie)+AiBr(g(¢9Z)-g(Çozd))+Ai(V(Z)-V(Zd))
-1AÏ-A,B,Kc(1rB:Ëë)+A,B,(g(€,z)-g(t,zd))+A,(v(z)-v(zd))
=,4ë-±BrKc(,,B,rËë,+Br(g,Ç"-g,Çfd,,+A,(yo-y@,
(H.17)La convergence de 1'erreu de pousuite ë vers zéro sera établie en utilisant 1'approche de Lyapuiov. Considérons la fonction quadratique suivante:
v--ëTÉe'
Alors
V--2ëT-s,è
-21ëTÉAF-+ë,§BrKc(1rB:Ëë,+±ëTËBr(g(€,z,-g(€,zd,,
+2ër5A,(y(z)-y(Zd))
L'équation (16) peut s'écrire comme suit:
A:_S+_SAr____S+ËBrB:_S
(11.18)
(H.19)
et si en multipliant les detK côtés de cette équation à gauche et à droite respectivement par ër et ë , on obtient:
2ëT_sArë___ëT_së+ëT_sBrB:_Së
ce qui modifie 1'expression (11.19) comme suit:
v--1V+1ëT-sBrB;-Së-fëT-sBrKc(1rBTr_së)
+±ërÈBr(gŒ,z)-g(€,zd))+2ërËA,(y®-yŒ))
=-1V+1ëT-SBrBTr-S-e-(1r-SBr-SërKc(1rBTr-Së) (11.20) Page 281
I
I
I
I
I
I
1
1
I
I
I
I
I
I
1
1
I
I
1
1
Chapitre 11 Théorie de la commande
+±ërËBr(g(ÇA-g(Çzd))+2ërÈA/(yo-y(Zd))
--„+,(ërÊBrBrr5ë-±(,,ËB,Ëë)rKc(„Ëë))
+±ërËB,(g(Çd-g(Ç,z,))+2ar5A,(yo-y¢d))
En posamt @ = Brg ë et en utilisant l'inégalité (11.14), on obtient:
(1r~SBr-SërKc(1rB:-Së)>_+~2(1r-SBr-Sër(1rBTr-Së)=`-212rëTËBrB:Èë
Avec cette relation, l'équation (11.21) devient:
v--1V+ëTËBr(g(¢,z,-g(t,zd,,+2ëTËA,(v(z,-v(zd,,'
(11.21)
(11.22)
Maintenant, compte tenu de la fonction y et de sa structure triangulaire, on peut montrer que l'on a pou / 21 :
2ë-r5A,(y(z)-y(Zd))S;Oiy
de même a partir de la fonction g , on a:
+ëTËBr(g(Ç,z,-g,Ç,zd,,=-"V
où Ü] et Ü2 sont des constantes indépendantes de / .
En combinant (11.22), (11.23) et (11.24), on obtient :
y < -(/ -Ül -Ü2) y
Par conséquent :
y(ë)=e-`/-Ü)`y(ë(O))
avec: Ü=Üi+Ü2.
Ainsi se temine la démonstration du théorème.
(11.23)
(11.24)
(11.25)
(11.26)
1
I
I
I
I
1
1
I
1
1
I
1
1
1
I
I
I
I
I
I
I
Chapitre 11 Théorie de la commande
Remarque 11.3 : Dans le cas où la structure de la matrice 4 est de la fome:
(11.27)
où 4. € RPXP , pou z. € [1, q -1] , est une matrice carrée inversible. Comme il a été montré dans [16] et [17], on peut donner la loi de commande v (e ) correspondante par:
v(e,--(Ë4)_'Kc(„gA,Ae,
avec
A = dz.¢g(#443...>Ë4)
(11.28)
11.4. Commande avec observateur à grand gain retour de sortie
Maintenant, on cherche à résoudre le problème de commande à grand gain incoiporant un
observateu pou les systèmes multivariables décrits par les équations (11.1), et pour atteindre cela, nous procéderons comme dans [17].
La commande avec retou de sortie qui nous conceme est obtenue en utilisant l'observateu à grand gain domé en Annexes où il a été proposé initialement par [18], cet observateu prend ici la fome suivante :
£ = i4£+¢(«(£), £)-6A;LS-Lcrc£ (H.29)
où € est l'erreu d'observation £-]f , la matrice Ao est une matrice diagonale donnée précédemment en fonction du scalaire positif 0> 0 (Voire Amexes), elle est donnée de la même manière que A, fomiulée a son tou par (H.12). La matrice S est donnée par (11.15). Maintenant, si nous soustrayons (B.1) de (11.29), on peut écrire :
é = i4£+¢(#(£), £)-¢(w(£), jr)-6A;ts-[Crc£ (11.30)
I
I
I
I
1
1
I
I
I
I
I
I
1
1
1
I
I
I
I
I
I
Chapitre ll Théorie de la commande
Coinme pou le système (11.1), le système (11.29) doit passer, à sont tour, par une transfomation qui le ramène vers les coordonnées (€, z) , il sera donné comme suit:
é = 42 +Br tGtÊ,ê,æ +gtê,2,j+y© _O¥t®ctê,2,jA;]S_]Cfc€, t[[.3ïa,
€ = 7(Ê,%)~Og+(®C(Ê,2))A;]S-]Crc€. (II.31b) Cette équation représente l'observateu dans les nouvelles coordonnées, où, 2 et ê sont les estimés respectives des variables z et € données par (11.3). Le terme € donné par (11.30)
représente l'erreu d'observation, alors que, 1'équation de l'erreu de pousuite (la dérivée de
l'erreu de pousuite é=é-2d) sera obtenue à partir des équations du système (11.31) et du modèle de référence désiré (11.5), elle peut être donnée comme suit :
é=4ê+BrtGtê,ê,æ_GtÊ,zd,„dj+Brtgtê,2,_gtê,zd,j
+y©-y@-o¥(®c,ê'ê,)A;ls-lcrc£,
ê-"(ê,2,")-O
(®c(2,ê,)A;ls-lcrc£.Parce que ê = 2 -zd , il est possible de remplacer 2 par ê + zd , ce demier système s'écrit alors:
é=4ê+B,(G(Ê,ê+zd)æ-G(Ê,zd)wd)+B,(g(ê,ê+zd)-g(ê,zd))
+y,ê+z-(z-¥(®c(2,ê,)A;1s-lcrcg,
ê=„tÊ,ê+z„j_o¥t®ct2,ê,jA;,S_ïcrc€.
La loi de commande donnée dans (11.11) aura 1'expression suivante:
û=«(ê,2)=(G(ê,2))+(2d'-g(ê,zd)+v(ê)),
v(ê, --Kc(1 rB:ËA,ê),
où 2dr , A, et Ë sont donnés respectivement par (11.7), (11.12) et (11.13).
(II.32a)
(II.32b)
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
Chapitre 11 Théorie de la commande
Comme dans la plupart des travaux relatifs à la synthèse des observateus grand gain, nous avons
besoin de l'hypothèse suivante:
Maintenant, nous énonçons ce qui suit:
Théorème 11.2. La commande avec retou de sortie du système (11.1) par la loi de commande a gramdgain(II.33)réaliseunepousuiteparfaiteasymptotique,soit]jge(f)=0.
Démonstration. On a deux parties dans cette démonstration, dans la première on montre que
1'erreur d'observation €(Z) converge exponentiellement vers zéro, i.e. }+i= £(f) = 0, puis on
prouve la convergence exponentielle vers zéro de l'erreu de pousuite e(f) , i.e. }iE e(f) = 0 .
Le résultat de la première partie est établie de la même manière que dans [16], c'est à partir d'une fonction de Lyapunov utilisant le vecteu de l'erreu g=OqAo£ avec q=1,2 ,..., g dont l'équation peut se déduire de (11.30) et est donnée par:
È = OJ4g +09Ao (¢(#(£), £)-¢(w(£), x))-OS-[CrŒ.
Posons maintenant K =E7'Sg et rappelant que g=09Ao£, la dérivée de la fonction y[ est
domée par:
V\=2fTSË
=-GK+2GgërsAo(¢(#(£),£)-¢(w(£),x))_GËrcrŒ
S-GK+||209ErsAo(¢(w(£),£)-¢(#(£),x))|| (H.34)
Maintenant, comme ¢ est triangulaire, et comme la fonction Kc est bomée (qui interviens dans
l'équation (11.33) pour le calcule de la commande), on obtient:
||2G9ërsAo(¢(#(£),£)-¢(#(£),x))||Sc¥Ë
où c¥ est une fonction positive qui ne dépend pas de 0 et / , voire [16] pou plus de détailles, on obtient:
71 s-(G-yo(`))ï
(11.35)I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
Chapitre ll Théorie de la commande
avec yo - 21 rrm(S)
1 rrin(S) C¥ où /mH(S) et /nrin(S) désignent respectivement la plus grande et la plus
petite valeu propre de S . Ceci conduit naturellement à la convergence exponentielle vers zéro
de l'erreu d'observation pou des valeurs de 0 relativement grandes
K(E)<e-(G7°(`))`K(g(o)). (11.36)
La seconde paftie est établie à partir d'une fonction de Lyapunov utilisant l'estimé de l'état
ë = / rA, ê dont l'équation peut se déduire de (11.32) et est domée par:
é-|A,ë-1rA,B,Kc(B:S-ë)+1rA,B,(gûç,ê+zd)-g(Ê,zd))
+/rA,(y¢+zÙ(zd))-OrrA,¥(£)A;ïS-]Crc€
-1Afi-1B,Kc(B:Ëë)+1B,(gû¢,ê+zd)-gûç,zd))
+/rA,(y¢+zÙ(z))~O]1/rA,¥(£)A;]S-]Crc€
La demière équation tient compte du fait que CAo = C .Considérons la fonction quadratique suivante: y2 = / -2rër5 ë , alors : V2=2|-2r~eT-S=e
-2`-2rërË(,4a-,BrKc(BrrËë)+,Br(g(Ê,ê+zd,-g(ê,zd,)
+/rA,(y¢+zÙ(zd))-Ori/rA,¥(£)A;[S-`Crc€)
(11.37)
(11.38)
Tenant compte de l'équation (11.20) et en utilisant l'identité A,Br = 7±8„ la dérivée de la fonction y2 peut s'écrire comme suit:
72=_Œ2+/-2r+[(±wrwwrKc(+2/-rërËA,B,(g(Ê,ê+Zd)-g(Ê,Zd))
+2/-rër5A,(y(ê+zd"zd))-2G.-y-rërËA/g=(£)A;ts-[Crc€
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
Chapitre ll Théorie de la commande
où w = Ærrj ë . En utilisant l'inégalité (11.14), on obtient:
72S-„2+`-,ërÉB,(g,Ê,ê+zd,-g,ê,zd,)+2,-rërËA,(y,ê+zd,-y,zd,)
+|| 2/-roHërËA, ¥(£)A;[S-[Crc€ ||
s-„2+2`-r||Èë||||B,(g,ë,ê+z,,-g,ê,z,,)||+2,-,||5ë||||A,(y(ê+zd)-y(zd))||
+||2/-rohër5A,¥(£)A;[S-]Crc£||
Par ailleurs, le théorème de la valeur moyenne donne:
||/-rA,(y-,-y(zJ,||=||A,#(Ç|,A7l||||ë||
(11.39)
pourfi"amatriceË(Ç])1estboméesuü.Etcomptetenudelasmictmedey(xL
ceftematriceesttriangularierifiérieue.LamatriceA,Ë(Ç])A;]nedépendquedestermesen 1 // et sa nome est bomée par une constante indépendante de / pour/ 21. De la même façon
Ona:
||-Æ,(g,ê,ê+zd,-g(ê,zd,)||-||/-rA,Ær(Ï(ê,Ç2))e||
= ,, A, BrgtÊ,Ç2jA7]ë ,,
= 11 Ï(Ê,Ç2) 1111 ë 11
pour£m.1anomedelamatriceï(çf2)estboméesurüpmuneconstmte(nedépend
pas de / ). 11 en résulte que:
2,, jë ,, || /-rA/ (y(ê,ê+zd,-y(ê,zd,) || = y|y
2,, Ëë ,, || /-rA/ (g(ê,ê+zd,-g(ê,zd,) || = y2y
I
I
I
1
1
I
I
I
I
I
1
1
1
I
I
1
1
1
1
1
I
Chapitie ll Théorie de la commande
où y],y2 >0 sont des constantes indépendantes de / .. Et en combinant ces deux dernières expressions avec (H.39), on obtient :
72<-(/-/)y2+2||O.~9/rërËA,¥(£)A;[S-[Crcë||
avec y = y] +y2 . En tenant compte de l'expression (11.13) et de la matrice Ë et puisque ®(jc)
est une transfomation définie, on a pou 0,/ 21 :
Gl-q/rëTgA/#(£,A;ls-1crcg,,sp/=(s,/-r|,g,,|,ë,,,
Ou : P=SuP
t,,=(x,,,;-R").
En combinant les inégalités (11.39) et (11.40), on obtient :
¢2S_t,_y,y2+P,àts,09,r,,€,,,,ë,,
=--(l-y)v2+CJTJT
Où C= PI Triïn(S)
(11.40)
(11.41)
11 suffit donc de prendre / >y et O>yo(/)pou obtenir la convergence exponentielle de l'estimé de l'erreu de pousuite. On en déduit que:
J-,=-=(Lf)J-,+
0 -1 -yo{1 ) + r cAinsi se temine la démonstration du théorème.
el=),-e-(Z),l=),
11.5. Incorporation d'une action intégrale ffltrée à la commande
On peut incoiporer dans la synthèse du système de commande avec retour d'état comme dans le
cas de la première classe considérée de systèmes non linéaires, une action intégrale filtrée. On obtient alors le modèle :
6f - ef
é'. = -reJ +rel
(11.42)1
1
1
I
I
I
I
1
1
1
I
I
I
I
I
I
I
I
1
1
I
Chapitre ll Théorie de la commande
où e\ = z' - z\d et T = diag
(:,...,:)
est une matrice de synthèse associé à l'action de filtragedésirée (7] > 0 où z. = 1 ,..., p sont des nonïbres réels) .
Le gain du système de commande avec retou d'état est alors déteminé à partir du modèle de
synthèse :
èa-Aaea+Ba(G(€,e+zd)ua-G(€,zd)ud)-Ba(g(€,e+zd)-g(€,zd))
+ya(e+Zd)-y(Zd)3 €-„(Ç,e+zd,„¢,.
avec ea , 4a , 84 et ya Sont définies comme suit:
(II.43a)
(II.43b)
La smcture de l'erreu (11.43) ressemble à celle de (11.10), donc, la loi de commande avec retou de sortie incoiporant une action intégrale filtrée sera donnée par:
•a(ê")-(G(ê,2))+(G(ê,2,)"v(êa))
=(G(ê,ê+zd))+(2dq-g(ê,zd)+v(êa)) vatêa,=_r_]Kœt,r+2BœrjaA„Aêû] Avec :Ad=dz.Œg(/p,±/p,...,±/p,±Jp)etA=düg(Tp/p,r,...,r,r)
(II.44a) (II.44b)où Ë¢ c'est l'uiique solution définie positive de 1'équation algébrique (11.13), qui sera donnée
co-e suit :
-sa+ATa_sa+ËaAa-_SaBaBTa_sa,
(11.45)
1
I
I
I
I
I
1
1
1
1
1
1
1
1
1
I
I
I
I
I
I
Chapitre ll Théorie de la commande
11.6. Conclusion
Dans ce chapitre, nous avons proposé une méthode de commande à grand gain combinée avec un
observateu produisant ainsi un contrôleu à retom de sortie. Une analyse de convergence basée su la méthode de Lyapunov a été effectuée. Une action intégrale filtrée a été incorporée dans la commande proposée pou réaliser un rejet asymptotique des perturbations du type échelon afin d'assuer une insensibilité adéquate au bruit de mesures qui peuvent intervenir. En suite,
l'application de cette commamde sera effectuée dans le chapitre suivante où le modèle de la
machine asynchrone sera transfomé vers la fome particulière exigée. Dans le chapitre suivant, nous nous intéresserons dans un premier temps, à l'expérimentation en simulation de cette structure de commande su le modèle d'un moteu asynchrone dans un rçpère lié au stator.
I
I
1
1
]
]
I
1
1
1
1
I
1
1
1
I
1
1
1
I
I
Cha,pitre 111
ftppaca;tion de h cormande a gra;nd gain
fl h machine asynchrone
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
Chapitre lll Application de la commande a gramd gain à la machine asynchrone
111.1. Introduction
Durant cette demière décennie, 1a commande au minimum de capteur est devenue un sujet important et un champ attrayant de la perspective industrielle où plusieurs démarches ont été déjà proposé, commande backstçpping, commande avec mode glissante (SMC), commande non linéaire, commande avec mode glissante d'ordre supérieu, commande vectorielle de la machine asynchrone avec mode glissant, et d'autres...
La commande de la machine asynchrone dans notre projet est faite par une approche non
linéaire dans les coordomées (c¥,¢) avec un contrôleu à grand gain et est adopté pou me
classe particulière des systèmes non-linéaires.
IH.2. AppHcation de la Commande à la Machine Asynchrone
Dms le premier chapitre nous avons étudié la modélisation de la machine asynchrone, cette étudenous permet de constater que le modèle non linéaire de la machine (donné par l'équation 1.44) n'est pas sous la forme conmandable désirée donnée au chapitre précédant (équation 11.3).
Alors, la première chose à fiiire pou pouvoir appliquer cette commande et de rechercher un autre
modèle de la machine, c'est-à-dire, effectuer un changement de variable qui nous permet de passer du modèle non linéaire vers la forme commandable désirée. Dans ce qui suit, nous allons effectuer ce changement de variables qui sera noté ® [17], nous rappelons que les deux premiers variables doivent êtres les grandeus à commander, dans notre cas, la vitesse f] et le carré de
module de flux ||¢r ||2 = ¢r2Œ + ¢,2p = ¢rr¢, déduit à partir de la figure suivante :
Figure 111.1 : Rçprésentation des vecteurs de flux de la machine et de l'angle €
La transformation ® qui ramène le modèle de la machine donné par (1.44) ou bien (1.45) vers la
forme canonique commandable suivante :
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
Chapitre lll Application de la commande a grand gain à la machine asynchrone
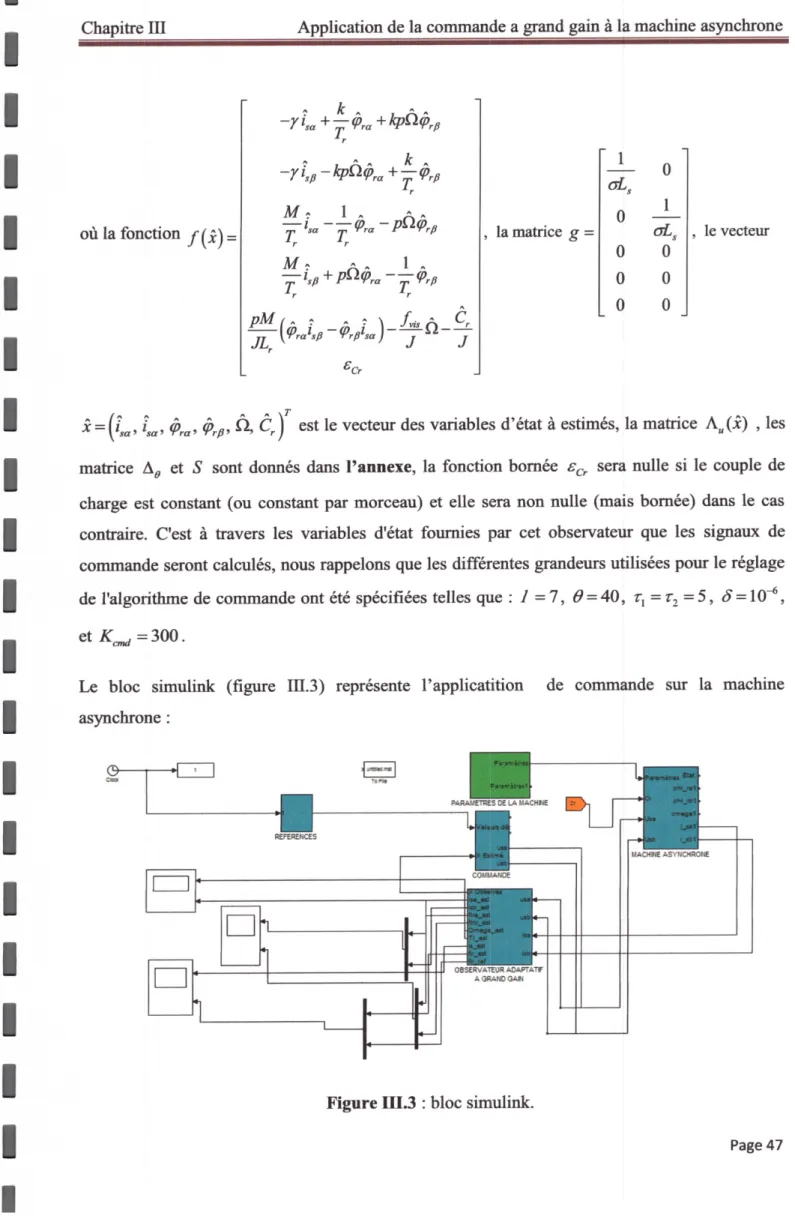
2=4z+BrtGt€,z,z„gt€,z,j+ytz,
€-ïl(¢,z,u)
J, - Cz - zl
est la suivamte :•-(::,R5-R5x-|;,|-z-|::|où®z-(::,et®ç-(Ç,
avec :Z]=(Z=:rr¢,),Z2=(:#Sr/2¢|etç=Æg(#)
(111.2)Maintenant, il est facile de montrer que le système obtenu avec cette transfomation qui nous
donne ces nouvelles variables peut se mettre sous la fome (111.1) en dérivant les nouveaux variables, en effet :
• Les composantes 2]] et 22 de la dérivée 2[ sont obtenues comme suit :
ïl\-h-p#r"Tpr-\-Jcr
2LL=±ZL2-±Cr etZ;=2¢,r¢,=2¢rr(¥Z.s+r+Pm2¢r)
-2MTqTris-frqTrpr+2pQqFJIpr
zi=-fz"ïz2
• Les composantes 2[2 et Z2 de la dérivée 22 sont:
z?-Ë(sTJ2Pr+isTJz¢r)
(111.3)
(HI.4)