République Algérienne Démocratique et Populaire
Ministère de l’Enseignement Supérieur et de la Recherche Scientifique
Université des Frères Mentouri de Constantine
Faculté des Sciences de la Technologie
Département d’Electrotechnique
N° de série : ………. N° d’ordre : ……….
T
T
T
h
h
h
èè
è
ss
s
ee
e
Pour l’Obtention du diplôme de
DOCTORAT 3
ème CYCLESpécialité: ELECTROTECHNIQUE
Option : Gestion & Transformation de l’Energie Electrique
Présentée par :
LARAKEB Maria
Master en Electrotechnique
Thème
Identification Paramétrique d’un Générateur Synchrone
et Filtrage en Mode Perturbé
Soutenue le, 28 /06 /2018 à 10h00 Devant le Jury :
Président : Djallel Kerdoun Professeur Université Frères Mentouri Constantine
Encadreur : Ammar Bentounsi Professeur Ecole Nat. Polytechnique Constantine
Examinateur 1 : Faouzi Soltani Professeur Université Frères Mentouri Constantine
Examinateur 2 : Said Drid Professeur Université de Batna
Examinateur 3 : Boubakeur Azoui Professeur Université de Batna
i
Remerciements
La thèse de doctorat représente un travail qui s’inscrit dans le temps, au sein d’une équipe de recherche où des liens se tissent. De nombreuses personnes se retrouvent ainsi mêlées de près ou de loin pour sa concrétisation, entre le doctorant et son doctorat. Ce sont ces personnes qui m’ont permis de faire aboutir aujourd’hui ma thèse que j’aimerais mettre en avant dans mes remerciements.
Je commencerai par remercier très chaleureusement mon directeur de thèse le Professeur
Ammar Bentounsi de l’Ecole Nationale Polytechnique de Constantine pour son soutien
continu ainsi que la Docteure Hind Djeghloud de l’Université des Frères Mentouri Constantine 1 qui m’a suivie tout au long de cette thèse.
Mes sincères remerciements aussi à Messieurs les membres du jury de soutenance : Djallel
Kerdoun, Prof. au dept. d’électrotechnique de l’UMC, qui nous a fait l’honneur de présider
notre jury ; Faouzi Soltani, Prof. au dept. d’électronique de l’UMC, qui n’a pas hésité à faire partie du jury ; Said Drid et Azoui Boubakeur, Profs. au dept. d’électrotechnique de l’Université Batna 2, qui ont aimablement accepté notre invitation pour évaluer nos travaux. Ce travail n’aurait pas été possible sans l’appui du Laboratoire de Génie Electrique de Constantine (LGEC) qui m’a permis, grâce à une contribution de recherches et à un soutien logistique, de mener à terme ma thèse.
Sans oublier ma profonde gratitude envers tous mes enseignants.
Au terme de ce parcours, je remercie celles et ceux qui me sont chers. Leurs attentions et encouragements m’ont accompagnée tout au long de ces années. Je suis redevable à mes parents, à mon mari et à mes frères pour leur soutien moral et matériel et leur confiance indéfectible dans mes choix. J’ai une pensée toute particulière pour mon frère Mehdi dont sa mémoire ne pourra jamais être éteinte.
Enfin, un grand MERCI pour mes collègues et toutes personnes qui ont participé de prés ou de loin à la réalisation de ma thèse.
Liste des publications
ii
Liste des publications
L’ensemble de nos travaux de thèse de doctorat ont été valorisés par des communications dans des conférences internationales et une publication dans des revues indexées. Ces communications scientifiques sont listées ci-dessous :
1. M. Larakeb, A. Bentounsi, H. Djeghloud, "On-line Parameters Estimation of Low-Scale
SPSG Uusing Discrete Kalman Filters”, JES, 12-4 (2016):770-785. Indexed in SCOPUS
and Web of Science (Thomson Reuters).
http://journal.esrgroups.org/jes/edition-2016.php
2. M. Larakeb, A. Bentounsi, H. Djeghloud, and K. Rachid, "On-line Estimation of SPSGP Parameters using Discrete Kalman Filters”, IEEE-EEEIC, Florence, June 7-10, 2016.
http://eeeic.eu/call/http://eeeic.eu/wp content/uploads/2016/06/finalprogram3.pdf
3. M. Larakeb, A. Bentounsi, and H. Djeghloud, "Biased Kalman Filter Applied for On- Line Estimation of SPSG Parameters”, 5th ICSC, Cadi Ayyad University,Marrakech, May 25-27, 2016.
https://controls.papercept.net/conferences/conferences/ICSC16/program/ICSC16_ContentLi stWeb_1.html
4. A. Lebsir, R. Rebbah, M. Larakeb, H. Djeghloud and A. Bentounsi,”Modeling and Analysis of a Salient Poles Synchronous Machines using Finite-Elements Method”,SPEEDAM’2014,
June 18-20, 2014, Ischia, Italie.
http://ieeexplore.ieee.org/xpl/articleDetails.jsp?arnumber=6871907
5. H. Djeghloud, M. Larakeb, Y. Terriche, A. Bentounsi, and D. Kerdoun, “Lab. Implementation of a Hybrid Series Active Power Filter System Part II: Series Active Filter Designing”, PEMC2014, Sept.21-24, 2014, Antalya, Turkey.
http://www.pemc2014.org/files/PEMC_program_booklet_16_09.pdf
6. H. Djeghloud, Y. Terriche, D. Kerdoun, M. Larakeb and A. Bentounsi, “Laboratory
Implementation of a Hybrid Series Active Power Filter System Part I: Designing of Passive Components”, 16th Int. Power Electronics and Motion Control Conf. And Exposition,
PEMC2014, Sept. 21-24, 2014, Antalya, Turkey.
http://www.pemc2014.org/files/PEMC_program_booklet_16_09.pdf
7. H. Djeghloud, O. Guellout, M. Larakeb, O. Bouteldja, S. Boukebbous and A. Bentounsi,
“Practical Study of a Laboratory Undersized Grid-Connected PV System”, Int. Conf. on
Smart Grids and Technologies, ISGT2014, Kuala Lumpur, Malaysia, 20- 23 May 2014.
http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=6873863*
8. H. Djeghloud, A. Bentounsi, and M. Larakeb, “Real and Virtual Labs for Enhancing a SM
course”, 15th ICEMS’2012, October 21-24, 2012, Sapporo, Japan
ii 9. H. Djeghloud, M. Larakeb & A. Bentounsi, «Virtual laboratory of conventional electric
machines», 7th International Interactive Mobile and Computer Aided Learning Conference IMCL 2012, Amman, Jordan, 6-8 November 2012.
Table de Matieres
iii
Table de Matières
Remerciements ...
i
Liste des publications ...
ii
Table des matières ...
iii
Liste des figures ...
vii
Liste des tableaux ...
xii
Acronymes et abréviations ...
xiii
Introduction Générale ...
xiv
CHAPITRE I:
Etat de l’art sur l’estimation paramétrique des générateurs synchrones &
Modèles d’identification
I.1 Introduction……….. 01I.2 Différentes structures de générateurs synchrones……….. 02
I.3 Etat de l’art sur les méthodes d’identification……….05
I.4 Méthodes valides pour l’estimation paramétrique off-line………... 06
I.4.1 Essai faible glissement……….. 06
I.4.2 Essai de court-circuit triphasé brusque……… 08
I.4.3 Essais de rejet de charge (load rejection tests)……….. 08
I.4.4 Essais de réponse en fréquence (frequency response tests) .………..…. 09
iii
I.5 Méthodes valides pour l’estimation paramétrique on-line………... 15
I.5.1 Réponse en fréquence en ligne (on-line frequency response)……….... 15
I.5.2 Utilisation de la réactance opératoire………... 16
I.5.3 Identification avec une charge active………... 17
I.5.4 Analyse de données modélisées (analysis of design data)………... 17
I.5.5 Modèle d’identification et estimation des paramètres à partir des données d’exploitation………... 18
I.5.6 Utilisation de l’expansion des séries orthogonales……….. 18
I.5.7 Black-box modélisation de générateur synchrone………... 18
I.5.8 Utilisation des séries Volterra... 19
I.5.9 Utilisation du modèle Wiener-neural ……….. 19
I.5.10 Utilisation du filtre de Kalman………. 20
I.5.11 Autres méthodes………... 20
I.6 Conclusion………... 21
CHAPITRE II:
Modélisation et identification paramétrique off-line de l’alternateur synchrone
II.1 Introduction……….. 22II.2 Principe de fonctionnement des machines synchrones……… 23
II.2.1 Machine synchrone à pôles lisses……..……… 23
II.2.2 Machine synchrone à pôles saillants …..……….. 24
II.3 Modèle mathématique de l’alternateur synchrone………... 25
II.3.1 Expression des inductances propres et mutuelles rotorique ……… 26
II.3.2 Expression des Inductances propres et mutuelles statorique ………... 27
II.3.3 Généralités sur la transformation triphasé / diphasé……….. 28
Table de Matieres
iii
II.3.3.2 Transformation de Park ……… 30
II.3.4 Equations générales des tensions et flux du générateur synchrone……… 30
II.4 Modèle de l’alternateur dans le repère diphasé ‘’odq’’ de Park..………... 31
II.4.1 Transformation de Park appliquée aux flux de l’alternateur synchrone………… 31
II.4.2 Equations de tensions simplifiées de l’alternateur synchrone……… 34
II.4.3 Considération de l’équation du mouvement ……….. 36
II.5 Représentation d’état de la génératrice synchrone……… 37
II.6 Identifications paramétriques de la machine synchrone……….. 39
II.6.1 Détermination des paramètres électriques………... 40
II.6.1.1 Résistances statorique et rotorique……….. 40
II.6.1.2 Résistance relative aux pertes fer…... 40
II.6.1.3 Inductances de fuites statorique et rotorique………... 41
II.6.1.4 Réactances directe et en quadrature…... 42
II.6.1.5 Réactances de magnétisation des axes ‘’d et q’’……… 44
II.6.1.6 Réactances transitoires et subtransitoire ………... 44
II.6.1.7 Résistances et réactances des amortisseurs……… 47
II.6.2 Détermination des paramètres mécaniques utilisant la méthode du point matériel. 48 II.7 Grandeurs relatives (système PER UNIT)……… 49
II.8 Conclusion ………. 50
CHAPITRE III:
Filtres de Kalman appliqués pour l’estimation paramétrique on-line de l’alternateur
synchrone
III.1 Introduction……… 51III.2 Description du système considéré……… 52
III.3 Identification en temps continu……… 53
iii
III.3.1.1 Modèle non linéaire de l’alternateur synchrone……… 53
III.3.1.2 Linéarisation utilisant la représentation d'état en temps continu………… 54
III.3.2 Introduction aux Filtres de Kalman et applications à l’estimation en temps réel…. 55 III.3.2.1 Modélisation des bruits de mesure et d’état du système considéré………… 56
III.3.2.2 Application du Filtre de Kalman Traditionnelle (FKT)……… ………58
III.3.2.3 Application du Filtre de Kalman Etendu (EKF)…... 58
III.3.2.4 Application du Filtre de Kalman Etendu Biaisé (FKEB)……….. 59
III.3.3 Méthodologie de l’estimation paramétrique……….. 60
III.3.3.1 Paramètres estimés en régime permanent………. 60
III.3.3.2 Paramètres estimés en régime transitoire……… 61
III.3.4 Résultats de simulation sous environnement MATLAB/Simulink……… 62
III.4 Identification en temps discret……….……….. 69
III.4.1 Modele d’etat de la machine synchrone en temps discrets ……….. 69
III.4.2 Introduction aux Filtre Kalman et ses applications à l’estimation en temps discret 69 III.4.2.1 Application du Filtre de Kalman Traditionnel Discret (FKTD)……….. 70
III.4.2.2 Application du Filtre de Kalman Etendu Discret (FKED)……….. 71
III.5 Résultats de simulation……… 72
III .5.1 Résultats du FKTD et FKED……… 73
III .5.2 Résultats du FKEBD……….. 78
III.5.3 Etude comparative entre le FKEBC et FKEBD………
78III.6 Conclusion………. 79
CHAPITRE IV:
Application du filtre de Kalman discret à l’estimation On-line des paramètres
d’un ASPS de faible puissance
IV.1 Introduction………82Table de Matieres
iii
IV.2 Rappel du système étudié ;……….83
IV.3 Estimation en temps réel (on line)………..…...85
IV.3.1 Linéarisation utilisant la représentation d’état en temps continu………. ……...86
IV.3.2 Description du système et application des filtres de Kalman en temps discret………...87
IV.3.3 Introduction au principe du filtre de Kalman discret………88
IV.3.3.1 Application du Filtre de Kalman Discret sous MATLAB/Simulink………89
IV.3.3.2Théorie et application du Filtre de Kalman discret Etendu………...90
IV.3.3.3Application du Filtre de Kalman Etendu Biaisé (FKEB)……….91
IV.4 Interprétation des résultats de simulation………...93
IV.5 Conclusions……….. .99
Conclusion Générale……….
Bibliographie
vii
Liste Des Figures
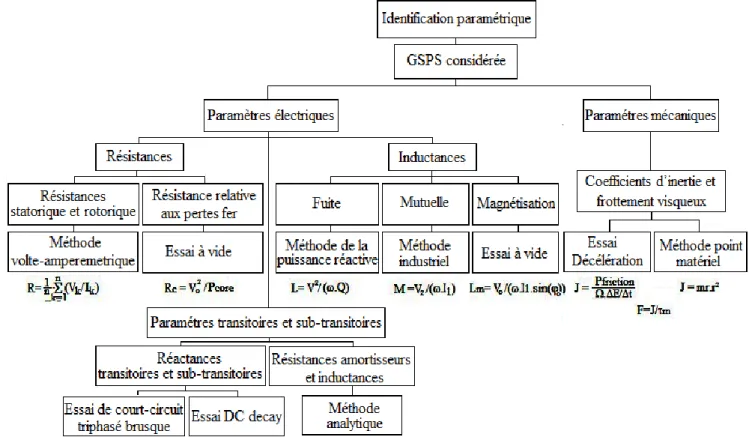
Fig.I.1. Organigramme d’un système d’identification paramétrique………...07
Fig.I.2. Configurations essais réalisés dans le domaine SSFR selon norme IEEE std 115……….11
Fig.I.3. Structure de la procédure d’estimation………..16
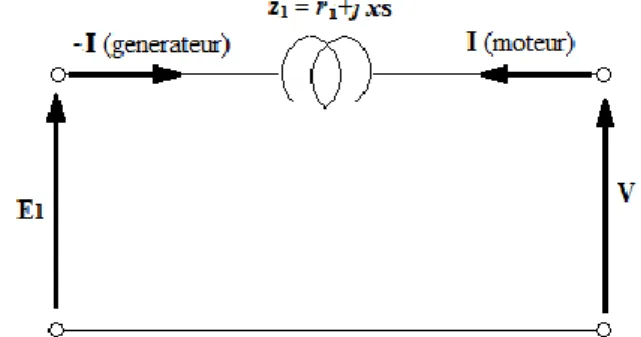
Fig.II.1. Circuit équivalent par phase de la MS à pôles lisses………...24
Fig.II.2. Diagramme vectoriel de fonctionnement en moteur et en générateur de la MS……….24
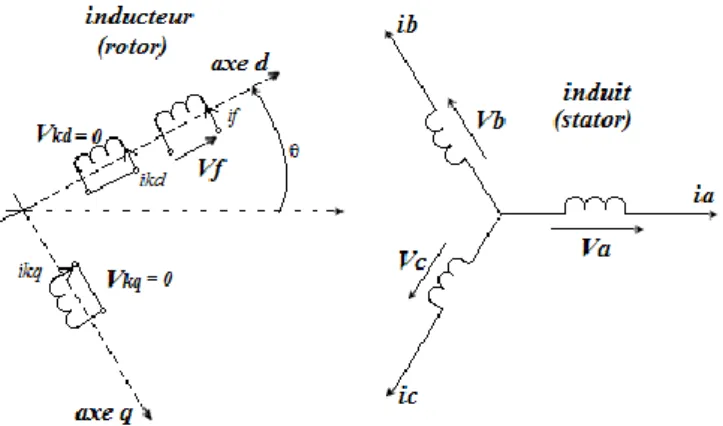
Fig.II.3. Schéma descriptif des différents enroulements de la MSPS………...25
Fig.II.4. Schéma équivalent du générateur synchrone avec un amortisseur sur chaque axe selon Park...32
Fig.II.5. Photographie de la machine synchrone à pôles saillant considérée dans cette étude………….39
Fig.II.6. Méthodes d’identification paramétrique off-line de la MSPS………40
Fig.II.7. Essai à vide pour la séparation des pertes fer et mécanique………41
Fig.II.8. Diagramme de Potier de la machine synchrone considérée………....41
Fig.II.9. Courant induit de la MS obtenu par un essai à faible glissement………42
Fig.II.10. Photo réelle de la MS considérée………...43
(a) l’induit………...…43
(b) l’inducteur……….43
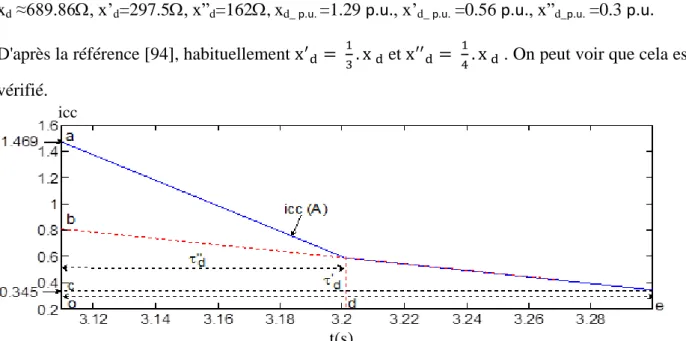
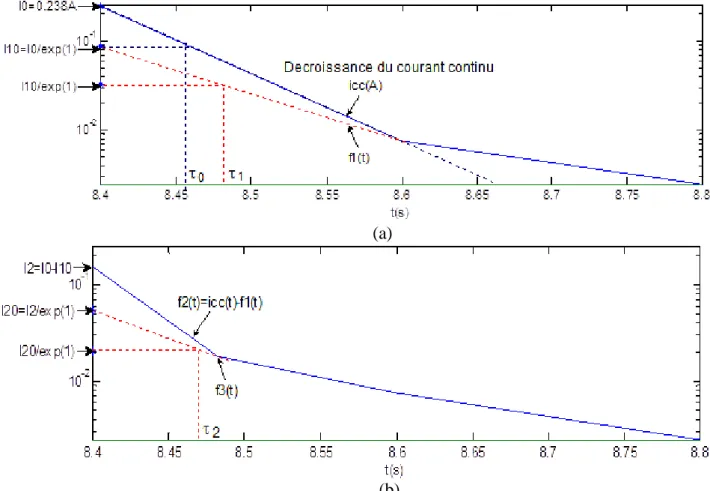
Fig.II.11. Courbe du court-circuit brusque de la MS………..45
Fig.II.12. Courbes de détermination de la réactance transitoire xq' :……….47
(a) Décroissance du courant icc et f1(t)………...47
Liste des figures
vii
Liste Des Figures
Fig.III.1. Description du système considéré………...53
Fig.III.2. (a) Fonction d’auto-corrélation, (b) Densité spectrale de puissance………..57
Fig.III.3. Schéma de principe du Filtre de Kalman Etendu………..59
Fig.III.4. Principe du Filtre de Kalman Baisé proposé………..60
Fig.III.5. Tension d’axes d-q avec et sans bruit (a) tension d’axe ‘’d’’ (b) tension d’axe ‘’q’’……....63
Fig.III.6. Tension d’axes d-q avec bruit [103] (a) tension d’axe ‘’d’’ (b) tension d’axe ‘’q’’……..…63
Fig.III.7. Courant d’axes d-q avec et sans bruit (a) courant d’axe ‘’d’’(b) courant d’axe ‘’q’’………64
Fig.III.8. Courant d’axes d-q avec bruit [103] (a) courant d’axe ‘’d’’ (b) courant d’axe ‘’q’’………..64
Fig.III.9. Flux d’axes d-q délivrés par le FKT et FKE (a) flux axe-d (b) flux axe-q……….65
Fig.III.10. Estimation de rf , Lmd et Lmq réalisée à partir du FKT et EKF (a) rf, (b) Lmd ,(c) Lmq….66 Fig.III.11. Estimations de lkd et lkq effectuées à partir du FKT et de FKE. (a) lkd , (b) lkq…………..67
Fig.III.12. MSE du Filtre de Kalman Etendu (FKE) biaisé et non-biaisé………68
Fig.III.13. NMSE du Filtre de Kalman Etendu biaisé et non-biaisé………....68
Identification a temps discret Fig.III.14. Théorie du Filtre de Kalman discret :(a) algorithme FKDT ; (b) principe FKDT………….71
Fig.III.15. Diagramme de principe du FKDE………..72
Fig.III.16. Tension d’axes d-q avec et sans bruit (a) tension d’axe ‘’d’’ (b) tension d’axe ‘’q’’……....74
Fig.III.17. Courant d’axes d-q avec et sans bruit (a) courant d’axe ‘’d’’(b) courant d’axe ‘’q’’……….75
Fig.III.18. Flux estimé d’axe ‘’d’’ obtenus à partir de (a) FKTD (b) FKED………...75
Fig.III.19. Flux estimé d’axe ‘’q’’ obtenus à partir de (a) FKTD (b) FKED………..76
Fig.III.20. Estimation de rf , Lmd et Lmq réalisé a partir du FKTD et FKED (a) rf, (b) Lmd ,(c) Lmq.77 Fig.III.21. Estimations de lkd et lkq effectués à partir du FKTD et de FKED. (a) lkd , (b) lkq………..77
Fig.III.22. MSE du Filtre de Kalman Etendu discret (FKED) biaisé et non-biaisé……… 78
vii
Liste Des Figures
Fig.IV.1. Méthodes d’identification paramétrique off-line de la MSPS………...84
Fig.IV.2. Description du système considéré………..88
Fig.IV.3. Schéma descriptif du principe d’application du Filtre de Kalman Discret………90
Fig.IV.4. Application du FKDT sous MATLAB/Simulink………..90
Fig.IV.5. Représentation du principe Filtre de Kalman Discret Etendu : ………91
(a) théorie FKDE,………..91
(b) Application sous MATLAB/Simulink………..91
Fig.IV.6. Schéma d’application du FKDEB sous MATLAB/Simulink………..93
Fig.IV.7. Tensions d’axes d-q avec et sans bruit……….95
Fig.IV.8. Courants d’axes d-q avec et sans bruit……….95
Fig.IV.9. Flux estimés d’axe ‘’d’’ obtenus à partir de (a) FKED et (b) FKD………96
Fig.IV.10. Flux estimés d’axe ‘’q’’ obtenus à partir de (a) FKED et (b) FKD……….96
Fig.IV.11. Estimations de rf,Lmd et Lmq réalisées à partir du FKD et FKED (a) rf,(b) Lmd ,(c) Lmq.97 Fig.IV.12. Paramètres estimés en régime transitoire :(a) lkd (FKTD ,FKED) , (b) lkq (FKTD,FKED).98 Fig.IV.13. MSE du Filtre de Kalman Etendu Discret (FKED) biaisé et non-biaisé……….98
Liste Des Tableaux
xii
Liste Des Tableaux
Tableau I.1. Modèles mathématiques standard de la machine synchrone [2]………...3
Tableau II.1. Caractéristiques de la machine synchrone considérée……….39
Tableau II.2. Coefficient de bobinage de la machine synchrone considérée………...44
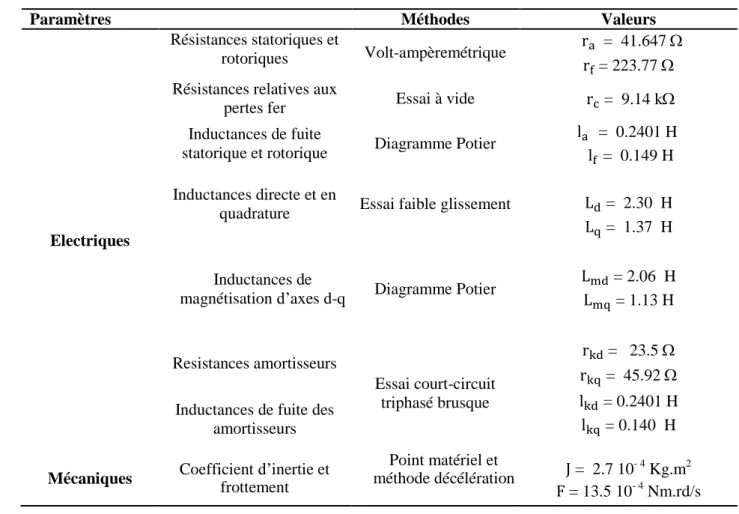
Tableau II.3. Paramètres identifiés de la MSPS considérée………..48
Tableau II.4. Grandeurs de base statorique et rotorique de la MSPS considérée………..49
Tableau II.5. Valeurs en p.u des paramètres identifiés de la MSPS considérée………49
Tableau III.1. Paramètres réels de la Machine Synchrone considérée [103]………..62
Tableau III.2. Résultats de la déviation standard du Filtre de Kalman Traditionnel et Etendu…….67
Tableau III.3. Résultats de la déviation standard des Filtre de Kalman Traditionnel et Etendu … ..79
Tableau IV.1. Caractéristiques de la machine synchrone testée ………84
Tableau IV.2. Valeurs en p.u des paramètres identifiés de la MSPS considérée ………..85
xiii
Acronymes et Abréviations
MS Machine synchrone.
MSPS /MSPL Machine synchrone à pôles saillants / lisses.
vd,vq, Ef
Tensions d’armature directes et en quadrature. Tension d’excitation.
id,iq,if,ikd,ikq Courants direct, en quadrature, d’excitation, amortisseurs direct et quadrature ra,rf, rkd,rkq Resistances d’induit, inducteur et amortisseurs d’axe direct et en quadrature. la,lf, lkd,lkq Inductance de fuites induit, inducteur et amortisseurs d’axes direct et quadrature. Ld,Lq, Lf,
Lkd,Lkq
Inductances d’armature d’axe direct et en quadrature, inducteur. Inductances d’amortisseurs d’axe direct et en quadrature.
Lmd, Lmq Inductances de magnétisations d’axe direct et quadrature fs, Fréquence synchrone
s,b Vitesse synchrone et valeur de base de la fréquence angulaire
Xd,Xq,Xmd,Xmq, Xf,Xkd,Xkq
Réactances d’axe direct, en quadrature et de magnétisations
Réactances d’inducteur (excitation) et amortisseurs d’axes direct et quadrature
X’d, X’q Réactances transitoires d'axe direct et en quadrature X”d, X”q Réactances sub-transitoires d'axe direct et en quadrature Xkd’, Xkq’ Réactances d’amortisseurs rapportées au stator
’d, ”d,
’do,”do
Constantes de temps d’axe direct: court-circuit transitoire et sous-transitoire, Constantes de temps d’axe direct: circuit ouvert transitoire et subtransitoire
Acronymes et Abréviations
xiii
’qo,”qo Circuit ouvert transitoire et subtransitoire
lA, rs, rr Longueur axiale du stator, rayons du stator et du rotor
Kw, m, g Coefficient d'enroulement, masse du rotor, épaisseur de l'entrefer J, F, Ωm Inertie, coefficient de frottement et vitesse mécanique
Te, Tm , Ts Couples électromagnétique et mécanique et temps d'échantillonnage Z1, Z2 Impédances réseaux
A,B,C,D Matrices d’état, entrée, sortie en temps continu. x(k),u(k),y(k) Vecteur d’état, vecteur d’entrée, vecteur de sortie
, z, Vecteur des paramètres, variable d'état étendue et vecteur des paramètres à estimer
, , ,Dd, I
Matrices discrète état, entrée, sortie. Matrice Identité
w, wd, Q, Qd Bruit d'état continu / discret et leurs matrices de covariance v,vd,R, Rd Bruit de mesure continu / discret et leurs matrices de covariance FKT, FKE Filtres Kalman Traditionnel et Etendu
FKEB Filtre Kalman Etendu Biaisé
xiv
Introduction générale
Les progrès technologiques ne cesseront de nous éblouir ; ils donnent à la vie un nouveau sens et à la science une nouvelle vie. Ces progrès se comptent par milliers, depuis la découverte de la relativité par Einstein jusqu’aux nanotechnologies. Tout comme les progrès réalisés dans le domaine de la conversion électromécanique d’énergie, particulièrement celui des machines synchrones qui nous intéressent ici dans le cadre de la thématique de notre thèse. A titre indicatif, citons les moteurs synchrones qui sont essentiellement utilisés dans l'industrie lourde avec des puissances comprises entre 150 kW et 15 MW et des vitesses synchrones comprises entre 180 tr/min et 450 tr/mi, tout comme nous citerons aussi les générateurs synchrones des centrales électriques, les aérogénérateurs des éoliennes, …
En vue de répondre à une demande d’énergie électrique sans cesse croissante et de bonne qualité, les producteurs essayent de renforcer la capacité de leurs sites de production moyennant le recours à des générateurs synchrones qui jouent un rôle important dans la stabilité des réseaux électriques, ce qui nécessiterait une connaissance précise des paramètres électriques, magnétiques et mécaniques pour chaque point de fonctionnement.
Plusieurs articles on été publier dans ce domaine , ce qui fait que ce thème est encore un sujet de recherche stimulant et attrayant comme l’indiquent les nombreuses techniques proposées pour la détermination des paramètres de la machine synchrone.
L’objectif principal de cette thèse de doctorat consiste à développer des outils d’identification paramétrique en mode on-line d’une machine synchrone à pôles saillants à faible puissance (73236 de 0.3 kW de LEYBOLD) se basant sur un algorithme d’optimisation qui dépende essentiellement du choix du modèle mathématique de la machine synchrone.
Pour cela, le choix d’une méthodologie de travail est important. C’est ainsi qu’une recherche bibliographique riche et variée a été effectuée dans le premier chapitre, basée principalement sur l’estimation des paramètres des machines synchrones et leurs modélisations, sur l’estimation paramétrique des machines électriques et les générateurs synchrones ainsi que leurs modèles d’identification.
Introduction générale
xiv L’étude s’est focalisée sur la modélisation de la machine synchrone à pôles saillants. Une représentation d’état a été réalisée dans l’objectif de trouver une relation mathématique entre les paramètres fournis par les fabricants et ceux déterminés par des essais off-line.
Dans le deuxième chapitre, nous avons présenté une approche didactique sur l’estimation paramétrique de la machine synchrone grâce à un ensemble d’essais expérimentaux classiques et spéciaux effectués pour l’identification en mode off-line. L'application de ces méthodes sur une machine synchrone de faible puissance vise à extraire les limitations des techniques d’identification paramétrique adoptées que ce soit en régime permanent, transitoire ou subtransitoire. L'objectif consiste en l’application des différentes méthodes d’identification afin de calculer les paramètres d’une machine synchrone de faible puissance. Traditionnellement, les paramètres des machines électriques sont livrés par le constructeur et vérifiés par les différents essais appliqués en mode off-line.
Les méthodes off-line basées sur des essais statiques (machine à l’arrêt) ne peuvent pas être précises pour identifier les paramètres des machines synchrones car ces paramètres changent lors de l'exploitation on-line. Par conséquent, l’objet du troisième chapitre est de poursuivre et d’actualiser un travail antérieur proposé par R. Fairbrain et R. G. Harley qui concerne la mesure on-line des paramètres d’une génératrice synchrone à pôles saillants (GSPS) connectée à un bus infini modélisé par une alimentation et une impédance de ligne. Alors que le Filtre de Kalman Etendu (FKE) a été appliqué pour identifier chacun des paramètres Rf, Lmd, Lmq en régime permanent et lkd, lkq à l'état transitoire, dans ce chapitre on a poursuivi l'étude en introduisant le FK Biaisé afin d'optimiser l’Erreur Carrée Moyenne, l’Erreur Carrée Moyenne Normalisée, et l’Ecart-type. Toute cette étude a été effectuée en temps continu et discret sous environnement MATLAB / Simulink afin de vérifier le développement effectué sur les Filtres de Kalman (FK). A la fin, une étude comparative entre les différents filtres sera fournie.
Enfin, l’étude présentée dans le quatrième chapitre consistera à appliquer les travaux exposés dans le chapitre précédent sur un générateur synchrone à pôles saillants (GSPS) de faible puissance (0,3 kW LEYBOLD 73236) avec un léger rappel des résultats de l’identification paramétrique expérimentale réalisés en off-line sur cette machine. Par la suite, Le Filtre de Kalman Discret (FKD) est l'estimateur appliqué sous ses différentes formes dans ce travail : il peut être utilisé sous sa forme traditionnelle (FKTD) pour les systèmes linéaires ou sous sa forme étendue (FKED) pour les systèmes non linéaires. Une autre application intéressante du Filtre de Kalman Discret consiste en la prise en compte du biais (FKEDB) qui permet de réduire l'erreur quadratique moyenne (MSE) entre les valeurs mesurées et
xiv
estimées de la variable d'état du système. En conséquence, l'erreur quadratique moyenne normalisée (NMSE) peut être réduite au minimum de même l'écart-type (STD) entre les valeurs réelles et estimées des paramètres peut être limité dans le pourcentage tolérable.
Nous conclurons en faisant ressortir les résultats les plus significatifs obtenus par les différentes approches ainsi que les perspectives pouvant améliorer ces travaux.
Etat de l’art sur l’estimation paramétrique des générateurs
synchrones & Modèles d’identification
CHAPITRE I:
Etat de l’art sur l’estimation paramétrique des générateurs synchrones &
Modèles d’identification
I.1 Introduction………01
I.2 Différentes structures de générateurs synchrones………...….02
I.3 Etat de l’art sur les méthodes d’identification……….…....05
I.4 Méthodes valides pour l’estimation paramétrique off-line………...06
I.4.1 Essai faible glissement………...06
I.4.2 Essai de court-circuit triphasé brusque………..08
I.4.3 Essais de rejet de charge (load rejection tests)………..08
I.4.4 Essais de réponse en fréquence (frequency response tests) .……….09
I.4.5 Réponse en fréquence à l'arrêt (standstill frequency response) ………...09
I.5 Méthodes valides pour l’estimation paramétrique on-line………..……….15
I.5.1 Réponse en fréquence en ligne (on-line frequency response)………..15
I.5.2 Utilisation de la réactance opératoire………...16
I.5.3 Identification avec une charge active………...17
I.5.4 Analyse de données modélisées (analysis of design data)………...17
I.5.5 Modèle d’identification et estimation des paramètres à partir des données d’exploitation………...18
I.5.6 Utilisation de l’expansion des séries orthogonales………...18
I.5.7 Black-box modélisation de générateur synchrone………....18
CHAPITRE I ETAT DE L’ART
I.5.9 Utilisation du modèle Wiener-neural ………19
I.5.10 Utilisation du filtre de Kalman………20
I.5.11 Autres méthodes………...20
1
CHAPITRE I
Etat de l’art sur l’estimation paramétrique des générateurs
synchrones & modèles d’identification
I.1 INTRODUCTION
Afin de mieux répondre à une demande d’énergie électrique croissante, suffisante et de bonne qualité, les producteurs tendent à renforcer la capacité de leurs sites de production, le plus souvent sur la base des sites existants. Comme les machines synchrones jouent un rôle important dans la stabilité des réseaux électriques, la connaissance précise de leurs paramètres électriques, magnétiques et mécaniques pour chaque point de fonctionnement est nécessaire. Un modèle valable pour celle-ci est primordial pour une analyse fiable de la stabilité et des performances dynamiques.
Près de trois quarts de siècle après les premières publications dans ce domaine, le sujet est encore un sujet de recherche stimulant et attrayant. Il existe de nombreuses techniques qui sont proposées pour la détermination des paramètres de la machine synchrone. Depuis des années, plusieurs d’entre elles se côtoient dans ce domaine ; parmi ces techniques qui sont appliquées pour l’identification paramétrique, certaines d’entre elles sont mieux adaptées à une identification en temps différé (les paramètres sont obtenus par le constructeur et sont ensuite vérifiés et confortés par les différents essais appliqués en mode off-line tels que ceux proposés par les normes CEI) qui se fondent sur des méthodes statistiques, réponses en fréquence … etc ; alors que d’autres sont plus convenables dans un contexte en temps réel (on line). Ces dernières se basent sur l’utilisation des algorithmes d’optimisation (réseaux de neurones, algorithmes génétiques, moindres carrés moyens et récursifs, algorithme du gradient, maximum de vraisemblance, filtres de Kalman traditionnelle, étendu et récursif,…). Le choix de l’algorithme d’optimisation est essentiel pour une bonne estimation des paramètres.
La recherche bibliographique qui a été effectuée pour ce travail de thèse se focalise principalement sur l’estimation des paramètres des machines synchrones et leurs modélisations.
CHAPITRE I ETAT DE L’ART
2
Dans ce chapitre, nous allons présenter les résultats d’une recherche bibliographique approfondie sur l’estimation paramétrique des machines électriques axée sur les générateurs synchrones ainsi que leurs modèles d’identification.
I.2 DIFFERENTES STRUCTURES DE GENERATEURS SYNCHRONES
Un modèle est une structure mathématique pouvant représenter un système étudié. Cette structure doit comporter les éléments d'ajustement. L'intérêt de fournir un modèle mathématique acceptable pour un système duquel on peut ‘’dériver’’ de nombreuse information relatives à son fonctionnement dynamique est de:
Donner des valeurs pour certain paramètres (caractéristiques du processus étudié).
Evaluer des grandeurs internes (observateur d’état)
Donner des valeurs estimées/filtres du signal de sortie.
Détecter la défaillance d’un système.
Un modèle quantitatif est dit « paramétrique » lorsque son expression analytique comporte un nombre infini de constants non précisées numériquement appelées paramètres. Les paramètres représentent les constantes d’ajustement du modèle. Selon l’importance de la modélisation, il est nécessaire d'utiliser un modèle mathématique pou l’étude d’une machine synchrone Cependant, il ya un certain nombre de modèles disponibles pour les machines synchrones qui dépendent de l'étude à accomplir et le nombre d'enroulements des machines synchrones qui sont modélisées. Quel que soit le choix de l'étude, il est nécessaire de tenir compte du fait que l'enroulement statorique est constitué de trois enroulement décalés de 120 degrés électriques, et une structure rotorique qui présente au moins une bobine d'inducteur et un nombre variable d'enroulements amortisseurs d’axes direct et en quadrature.
Au fil des ans, l’augmentation de puissance des calculateurs a permis de travailler avec des modèles complexes. Il est tangible et intuitivement prévu qu’avec des modèles plus précis de meilleurs résultats seront obtenus.
Le Tableau. I.1 [1,2] illustre les différents modèles généralement adoptés pour une machine synchrone. Ce tableau regroupe les différents modèles mathématiques avec un grand nombre de variations possibles, la complexité de ces derniers réside dans la variation du nombre d’enroulements amortisseurs qui sont associés à chaque axe. Selon la référence [1], il est prévu que les meilleurs résultats correspondent au modèle 3.3.
3
Tableaux. I.1 Modèles mathématiques standards de la machine synchrone [2]
Modèle1.0 : un amortisseur sur l’axe ‘’d’’ et circuit d’excitation
Modèle 1.1 : un amortisseur sur l’axe ‘’d’’ et un sur l’axe ‘’q’’
Modèle 2.1 : deux amortisseurs sur l’axe ‘’d’’ et un sur l’axe ‘’q’’
Modèle 2.2 : deux amortisseurs sur l’axe ‘’d’’ et deux sur l’axe ‘’q’’
Modèle 3.2 : trois amortisseurs sur l’axe ‘’d’’ et deux sur l’axe ‘’q’’
Modèle 3.3 : trois amortisseurs sur l’axe ‘’d’’ et trois sur l’axe ‘’q’’
CHAPITRE I ETAT DE L’ART
4
Étonnamment, les études effectuées dans les années soixante-dix par Northeast Power Coordinating Council [3] ont montrés qu’en général dans l'analyse de la stabilité il est plus important d'utiliser des données précises de la machine que d'utiliser des modèles plus complexes. D’autre part, dans certaines études, les modèles mathématiques moins complexes ont pu surpasser ceux les plus précis lorsque les deux étaient alimentés avec des paramètres erronés. Le manuel classique de Westinghouse Electric Corporation ‘’Electrical Transmission and Distribution ’’ fournit des informations sur la construction et le fonctionnement des machines synchrones [4].
Un autre ouvrage utile dans le domaine des machines électriques intitulé ‘’Electric Motor Repair’’ par Rosenberg [5] est un guide pour les praticiens qui on l’esprit pratique ; il se concentre sur les enroulements, la réparation et le dépannage d'un grand nombre de moteurs AC/DC et les contrôleurs.
‘’ Power System Stability and Control ‘’ par Kundur [6] et ‘’Power System Control and Stability’’ par Anderson et found [7] fournissent une analyse complète et détaillée des machines synchrones, sur la théorie et la modélisation ; ils consacrent trois chapitres sur ce sujet et couvrent la transformation de Park ‘’dqo’’, la représentation ‘’per unit’’, circuits équivalents et l'analyse de fonctionnement en régimes permanent et transitoire.
Saadat dans ‘’ Power System Analysis ’’ [8] se concentre sur l'analyse transitoire du générateur synchrone et sur les défauts symétriques et asymétriques.
Anderson, Agrawal et Van Ness [9] apportent une analyse approfondie des machines synchrones. Ils consacrent un chapitre sur la modélisation de la machine synchrone et fournissent une analyse approfondie sur les équations des axes directs et en quadrature ; ils examinent aussi la transformation de Park, tandis que dans l'un de leurs chapitres ils seconcentrent sur le calcul paramétrique, les données mesurées à partir d’essais réalisés sur terrain et les résultats des essais d’échantillonnage.
Chacun des livres ‘’ Electric Machinery ‘’ [10] et ‘’ Analysis of Electric Machinery ‘’ [11] sont une source d’information utile sur les machines électriques ; les deux livres contiennent la théorie des machines synchrones et l’analyse du fonctionnement en régime permanent.
En outre, les références [11], [12-22] offrent des détails intéressants sur les impédances opérationnelles et les constantes de temps ainsi que la linéarité des équations, en sus d’un chapitre sur le déséquilibre des machines synchrones et asynchrones.
5
I.3 ETAT DE L’ART SUR LES METHODES D’IDENTIFICATION
Historiquement, la première machine qui a fait l’objet de travaux d’identification paramétrique est la machine asynchrone (MAS). Plusieurs articles de synthèse concernant ce thème existent ; parmi eux, citons : M .Velez-Reyes, J. Ramos [23], E.Levi, H.A.Toliyat [24] et W. Michalik [25] qui ont apporté des réflexions sur l’application des techniques d’identification des paramètres. Différentes formulations des modèles des machines asynchrones sont confrontées à des techniques d’identification off-line et on-line, parmi eux :
Les travaux décrits par H. Sugimoto, D.J. Atkinson, L. Loron et J. Chung respectivement [26-30] où l’application des nouvelles topologies d’observateurs afin d’estimer les paramètres électriques (statoriques et rotoriques) des moteurs asynchrones on été adoptés. Par exemple, Sugimoto a développé une théorie à base de modèles de systèmes adaptatifs de référence (Model Reference Adaptative Système (MRAS)) dans le but d’identifier la résistance secondaire d’une MAS. Alors que J. Atkinson et L. Loron décrivent respectivement l’application de l’algorithme du Filtre de Klaman Etendu (FKE) à l’estimation on-line des résistances et courants rotoriques ainsi que pour la commande indirecte par orientation du champ afin d’estimer les paramètres rotoriques d’une MAS. J. Chung présente un nouvel observateur basé sur le principe classique des moindres carrées moyens de la commande adaptative et la théorie du filtrage pour l’estimation des paramètres électriques de la MAS .
Dans d’autres articles [31] de D.Telford , M. Cirrincione [32] et L.A. de Souza Ribeiro [33], de nouvelles méthodologies pour l’estimation on-line et off-line basées sur des algorithmes récursifs sont mises en œuvre pour identifier les paramètres des modèles comportementaux (modélisation du comportement, c'est-à-dire la détection et la mesure des éléments du comportement du système afin de pouvoir réaliser un modèle mathématique) de la MAS comme présenté par M. Cirrincione qui a utilisé cette méthode récursive basée sur les moindres carrées dans le but d’identifier les paramètres de la MAS à l’arrêt .
Des travaux similaires ont été réalisés sur des machines synchrones que ce soit à aimants permanents par S.Perez Londono [34] , K. Hyunbae [35] et T.tang [36] qui se sont étalés surle même point ; de même pour les machines synchrones à rotor bobiné qui ont été présentés par C. Lee et T. Tan [37], M. Namba et T. Nishiwaki [38] qui ont appliqué des méthodes d’identification on-line pour identifier certains paramètres électriques. Par ailleurs, les références [39] de M.W. Naouar et [40] de Moreau ont plutôt privilégié l’application des méthodes d’identification off-line.
CHAPITRE I ETAT DE L’ART
6
Cependant, l’intérêt croissant pour la sûreté de fonctionnement a plus récemment conduit à utiliser ces méthodes d’identification paramétrique au service de la détection et du diagnostic des machines électriques. Par exemple, dans les articles de S. Bachir [41], D.F. Leite [42] et O. Touhami [43], des modèles d’actionneurs asynchrones associés à des techniques d’identification paramétriques sont mis en œuvre pour détecter/diagnostiquer les défauts statoriques des machines asynchrones.
Qu’il s’agisse de la machine asynchrone ou synchrone, la plupart des travaux réalisés dans le domaine concernant l’utilisation des techniques d’identification paramétrique avaient pour objectif d’avoir une meilleure connaissance des paramètres d’une machine et améliorer leurs performances et la précision des algorithmes de contrôle.
Les questions et les problèmes associés à l’identification des paramètres off-line pour les machines synchrones ont longtemps été abordés par de nombreux chercheurs dans les années 70 (1969 et 1974). De nombreuses méthodes ont été développées pour étudier l’impact des conditions d’exploitation des variations des paramètres et trouver des valeurs paramétriques supplémentaires en se basant sur les modèles des générateurs synchrones, tels les travaux de P.L. Dandeno , Schulz [44] , Dineley [45] ; alors que Canay [46] se concentre sur le développement des circuits équivalents des enroulements amortisseurs pour l’estimation des paramètres du générateur synchrone.
I.4 METHODES VALIDES POUR L’ESTIMATION PARAMETRIQUE
OFF-LINE
Dans cette section les différentes méthodes d'estimation paramétrique les plus utilisées en mode off-line seront traitées, ainsi que certains des procédés qui ont reçu une attention particulière dans la communauté des chercheurs.
Le modèle mathématique du générateur synchrone est développé dans le chapitre qui suit où tous les éléments nécessaires pour la compréhension de certains paramètres sont mentionnés dans cette section.
I.4.1
ESSAI FAIBLE GLISSEMENTCe test fait partie de la norme CEI ‘’ ANSU IEEE Std 115-1995’’ [12]. L’essai à faible glissement est effectué par l'entraînement du rotor à une vitesse légèrement différente de la
7
vitesse synchrone avec circuit d’excitation ouvert et l'induit alimenté par une tension triphasée. Uneanalyse en régime permanent est valable car le glissement est très faible.
Il peut être trouvé [13] que l'amplitude du courant d'induit est modulée entre deux valeurs maximale et minimale proportionnelles à Xq et Xd, respectivement :
;
(1)
Bien que cet essai paraisse conceptuellement simple à réaliser, sa mise en œuvre est loin d’être banale. En effet, pour la détermination précise de la réactance longitudinale (axe quadrature), il est difficile de maintenir la vitesse constante lorsque le glissement est très faible car l’effet de la saillance et du courant induit dans les circuits amortisseurs produisent un couple variable. En outre, la tension induite dans le circuit d’excitation ouvert peut atteindre des valeurs dangereuses lorsque le glissement est important.
La Figure I.1 représente le procédé qui est suivi dans les problèmes des systèmes d’identification qui sont décrits dans ces méthodes.
CHAPITRE I ETAT DE L’ART
8
I.4.2
ESSAI DE COURT-CIRCUIT TRIPHASE BRUSQUELe test de court-circuit est probablement le test le plus connu pour l'estimation des paramètres. Son importance est non seulement en raison du nombre de paramètres qui peuvent être déterminés mais aussi parce qu'il fournit le fondement théorique pour les définitions réelles des paramètres standards. Ce test est basé sur l'équation ci-dessous réécrite ici et adapté pour l'axe direct:
(2)
Quand une machine synchrone à vide est soumise à un court-circuit triphasé brusque, et en supposant que la vitesse reste constante à une valeur (1 p.u) pendant le test, le courant induit, en système p.u sera donné par l’expression suivante:
(3)
Où I(t) est le courant de court-circuit alternatif efficace, ‘E’ est la tension alternatif efficace avant le court-circuit et ‘t’est le temps mesuré en secondes à partir de l’instant de court-circuit.
En raison des termes exponentiels dans l’équation, une analyse graphique est nécessaire pour l’identification des deux termes exponentiels et les constantes de temps transitoire et sub-transitoire de l’axe direct.
De la même manière, la réactance transversale (axe direct) transitoire et sub-transitoire peut être identifiée. Une fois que le régime permanent est atteint, la réactance Xd peut aussi être mesurée.
I.4.3
ESSAI DE REJET DE CHARGE (LOAD REJECTION TESTS)L’approche de cet essai est similaire à celle de l’essai de court-circuit brusque, du fait que le temps de réponse des variables de la machine après une perturbation brusque est mesuré pour identifier les caractéristiques de la machine [14,15].
Après la mise en place de certaines conditions initiales, la réponse de la machine à un rejet de charge (load rejection) est enregistrée.
Les conditions initiales déterminent l'axe sur le quel les paramètres sont dérivés ; de cette façon et avec des conditions de fonctionnement disposés de manière que le courant circule uniquement
9
dans l'axe direct (id = 0) ; la machine est entrainée et la tension obtenue aux bornes et la chute du courant d’excitation sont utilisés pour l’extraction des paramètres de l’axe transversal (axe directe). Un test identique est effectué avec un courant circulant uniquement sur l’axe longitudinal (quadratique iq=0) afin d’obtenir les données de cet axe.
Ces essais fournissent des données pour les axes directs et en quadrature. Cependant, ils sont assez difficiles à réaliser. Pour la plupart des machines, il est difficile, voire même impossible, d'atteindre des conditions non saturées qui compliquent certainement l'essai et l'analyse des résultats [6].
I.4.4
ESSAI DE REPONSE EN FREQUENCE (FREQUENCY RESPONSE TESTS) Les méthodes de réponse en fréquence représentent l'état de l'art dans l'estimation des paramètres. Au fil des ans, d'importants travaux menés par de nombreux chercheurs ont donné à ces essais une base solide pour leur mise en œuvre pratique qui a même remplacé l’approche du ‘’court-circuit ‘’ la plus conventionnelle.I.4.5
REPONSE EN FREQUENCE D'ARRET (STANDSTILL FREQUENCY RESPONSE, SSFR)De nos jours, il est largement accepté que l’étude de la stabilité nécessite les caractéristiques synchrones de chacun des axes direct et en quadrature de la machine. Des procédures alternatives qui fournissent les paramètres de stabilité des deux axes (d-q) sont définies dans la norme IEEE std 115 [12], et appelés les ‘’SSFR tests’’. A travers ces procédure, il est possible d’obtenir des taux de variation des quantités statorique et rotorique sur une large gamme de fréquence.
Les cinq grandeurs opérationnelles suivantes ont été considérées utiles dans le développement des fonctions de transfert ou pour les modèles équivalents des machines synchrones. Les quantités ci-dessous peuvent également être obtenues à partir d'autres paramètres mesurables de la machine à l'état d'arrêt.
1. Zd (p);impédance opérationnelle de l'axe directe de la machine synchrone qui est égale
à , où est la résistance d’armature par phase.
(4) Où ‘’p’’ représente la fréquence complexe (j ) ; ed, id sont la tension et courant d’armature de
CHAPITRE I ETAT DE L’ART
10
En ce qui concerne la figure 2.a, l'amplificateur est connecté aux bornes ‘’a’’ et ‘’b’’ de l'enroulement statorique ; il existe une dérivation de mesure connectée à l’enroulement ‘’b’’et l’enroulement d’excitation en court-circuit.
1. Zq (p); impédance opérationnelle de l'axe quadratique de la machine synchrone qui est
égale à , où est la résistance d’armature par phase.
(5)
Dans lequel eq et id représentent respectivement la tension et le courant d’armature de l’axe
quadratique.
La mesure de l'impédance opérationnelle de l'axe quadratique est réalisée de la même manière que celle de l'axe direct à l'exception que dans les mesures opérationnelles d'axe en quadrature, l'amplificateur est connecté aux bornes ‘’b’’ et ‘’c’’ de l'enroulement statorique.
2. La troisième quantité de la machine est donnée par la relation :
(6)
Une autre méthode de mesure de ce paramètre est proposée comme suit :
(7) Où ifd représente le courant d’excitation. L'avantage de la forme de la mesure dans l'équation (4)
c’est qu'elle peut être mesurée en même temps que Zd (p).
Pour la mesure de pG(p), les paramètres ifd et id qui sont connectés à l'appareil (comme illustré
sur la figure 2.b) doivent être mesurés.
3. Le quatrième paramètre mesurable de la machine synchrone à l'état d'arrêt est l'impédance de transfert stator-rotor ‘’Zafo(p)’’, qui est effectué de la manière suivante:
(8) Enfin, l’enroulement d’excitation est ouvert en supprimant le courant shunt d’excitation mesuré et ‘’ifd et i ‘’ signaux lead qui sont connectés à l'appareil de mesure selon Figure. I.2.c.
11
Fig.I.2. Configurations d’essais réalisés dans le domaine SSFR selon norme IEEE std 115 [12].
4. Le cinquième paramètre mesurable de la machine synchrone à l'état d'arrêt sera obtenu en excitant le rotor avec le stator ouvert, qui est appelé l'impédance de transfert rotor-stator.
(9)
Tous les essais sont effectués avec rotor fixe et déconnecté du système, le stator excité par une source de faible tension (± 60A, 20V) ; les essais sont effectués sur une gamme de fréquences qui varie d'un minimum au moins d’un ordre de grandeur inférieur à celui correspondant à la constante de temps transitoire du circuit-ouvert du générateur, jusqu'à un maximum qui devrait se situer entre deux ou trois fois la fréquence nominale du générateur.
Les expressions des équations (4) à (6) permettent de tracer Ld(p), G(p) et Lq(p) d'où la
représentation polynomiale de chaque valeur, comme il est explicité dans les expressions [12], pouvant être trouvé avec un processus d’ajustement de la courbe.
Ceci est une excellente particularité du procédé, car il permet une représentation très détaillée de chaque axe tout en ajoutant plus de pôles et de zéros au modèle. Ceci est équivalent à inclure plusieurs enroulements d'amortissement dans le modèle [12]. D'autre part. Cela peut être un
CHAPITRE I ETAT DE L’ART
12
problème important par lui-même à cause de la diversité de différents modèles qui peuvent être adaptés en fonction de nombreux effets des mutuels qui sont considérés.
Cela a suscité des discussions approfondies sur la signification physique des modèles eux-mêmes [16,17]. Il peut y avoir des problèmes liés à l'absence de prise en compte des effets de rotation parce que les enroulements d'amortissement ne peuvent pas former une bonne connexion à l'arrêt et la mesure dans laquelle la rotation amène les cales d'encoche pour former un chemin à basse impédance vers le rotor est largement inconnue [6, 18].
Cette technique a été largement testée [19-21]. D'abord présentée comme une norme d'essai utilisée selon IEEE en 1983 [22], elle été incorporée dans la norme IEEE Std. 115 en 1995 [12]. Par ailleurs, sous différentes conditions de chargement certains paramètres de la machine synchrone peuvent varier légèrement, sachant que les paramètres transitoires de la machine synchrone sont fortement non-linéaires et dépendent des états de fonctionnement en charge (de la saturation, distribution du flux…) et donc les méthodes off-line peuvent ne pas être assez précises pour certaines applications.
De nombreuses contributions à l’identification on-line des paramètres ont été publiées cette méthode semble être la plus attrayante.
Idéalement, les paramètres de la machine synchrone peuvent être déterminés sous différents état de fonctionnement, que se soit en régime permanent ou transitoire.
En 1977 C. Lee et T. Tan [47] ont proposé un algorithme pour déterminer les paramètres d’un
générateur à poles saillants à partir des données obtenues par l’essai en court-circuit en utilisant l’algorithme itératif basé sur la théorie de l’estimation pondérée des moindres carrées. En 1981
M. Namba et T. Nishiwaki [48] utilise le Filtre de Kalman Etendu pour identifier les constantes
de stabilité dynamique pour les petites perturbations en régime permanent comme condition de fonctionnement ; durant la même année, P.L. Dandeno [49] utilise les mesures on-line des réponses en fréquence de deux grands turbogénérateurs pour identifier les paramétres.
La références [50] de Zhengrming et Fungshi étudie l’estimation on-line des paramètres dynamiques des grandes machines synchrones>50 MVA ainsi que la vérification expérimentale. L’algorithme appliqué est basé sur la théorie des moindres carrés pondérés ou étendue à partir des grandes équations de perturbations ; ils ont employé l’angle de puissance mesuré comme argument d’observateur dans l’algorithme et ont décrit une grande machine synchrone au point
13
de vue du système en supposant que la grande machine synchrone est connectée à un bus infini à travers une réactance de ligne. La procédure a consisté à ajuster l’inductance (variable) de sorte que la machine fonctionne dans l’état stationnaire ; ensuite, en créant une perturbation à travers un interrupteur lors de sa fermeture, la tension d’excitation change ce qui va provoquer une perturbation, alors la tension transitoire de ligne et les courants de phases et l’angle de puissance seront enregistrés. L’acquisition des données sur ordinateur et l’estimation des paramètres en temps réel seront réalisés par l’algorithme et les paramètres électriques et mécaniques de la machine synchrone seront estimés.
Une autre méthode a été employée par Zhengrming [51] ; elle consiste à développer un nouvel algorithme adaptatif dans le concept du ‘’SIF (Synthetized Information Factor) qui est proposé comme le noyau de cet algorithme pour l’estimation on-line des paramètres transitoires variables d’une machine synchrone en fonction des différentes conditions de fonctionnement. La problématique a été de trouver un algorithme adaptatif optimal pour pouvoir suivre les paramètres variables rapidement et de façon stable pendent les régimes transitoires.
Fréquemment utilisés, les algorithmes adaptatifs comprennent les moindres carrés moyens utilisant l’algorithme du gradient (‘’Least Mean Squart LMS’)’ et les moindres carrés exacts utilisant l’algorithme récursif (‘’Recurrence Least Squart RLS’’). Les moindres carrés moyens utilisant l’algorithme de gradient pour estimer les paramètres basés sur les données échantillonnées à des instants différents comme le décrit la référence [52] sont limités à cause de leur pauvre capacité à suivre. La 2eme méthode est les moindre carrés exacts utilisant un algorithme récursif ; cette méthode peut prendre en considération les données précédentes et souligne les données présentes selon le facteur d’oubli, alors la capacité de suivre de RLS est améliorées par rapport à LMS.
Ainsi, l’objectif dans [51] est de proposer que le concept du facteur d’information synthétisé ‘’FIS’’ remplace le facteur d’oubli dans la méthode RLS.
Keyhani qui a mené des recherches sur l'estimation des paramètres en utilisant un certain nombre
de techniques différentes, offre une littérature abondante sur ce sujet.
Une des méthodes utilisées par Keyhani était l'estimation des paramètres à partir des données des essais de réponse en fréquence d'arrêt [53,54]. Dans cette approche, les techniques d’ajustements de la courbe sont utilisées pour calculer les fonctions de transfert de l'axe direct et de l'axe en quadrature utilisant les données expérimentales disponibles. Les paramètres du modèle sont
CHAPITRE I ETAT DE L’ART
14
ensuite calculés à partir des équations non linéaires qui se rapportent aux paramètres de la machine et aux constantes de temps qui correspondent à des fonctions de transfert [54].
Keyhani dans [55] offre une évaluation de la performance de la méthode de maximum de
vraisemblance ML (Maximum Likelihood ) à l'aide des données étudiées à partir d’essais de réponse en fréquence d’arrêt SSFR ( Standstill Frequency Response ) sur un générateur de 722 MVA. Il est démontré que la méthode ML donne des estimations à erreur très faible, tandis que le bruit de la machine n'a pas trop d'effet sur l'estimation. L'algorithme ML et les données SSFR ont également été utilisés dans [56] pour estimer les paramètres d’une machine synchrone triphasée à pôles saillants de 5kVA
Pour le même type de machine, Tsai, Keyhani et farmer [57] ont présenté une approche étape par étape du système d’identification pour l’estimation on-line des paramétrés à partir des petites perturbations et ils ont aussi utilisé la technique du Maximum de vraisemblance ML afin d’identifier le modèle on-line de la machine synchrone.
La première étape était d’identifier le modèle équivalent des paramètres linéaires de la machine ; par conséquent, les modèles de saturation de la machine ont été identifiés à partir des inductances mutuelles estimées dans une large gamme de conditions de fonctionnement.
Il a été démontré que la simulation basée sur les mesures on-line à petite et grande perturbations dynamique est effectué pour valider la précision des modèles identifiés, y compris le modèle de saturation.
Elias, Gerald et vijay [58] offrent un concept innovateur pour l’estimation on-line d’un
générateur synchrone qui a été un sujet de thèse [59] en utilisant un observateur pour l’estimation des courants amortisseurs, car habituellement les données disponibles pour les générateurs synchrones sont les courants de phase et les tensions sur les bornes de la machine. Afin de formuler le problème d’estimation des paramètres, il est nécessaire d’avoir des mesures pour les courants amortisseurs ; alors il est essentiel d’estimer les courants amortisseurs au moyen d’un observateur avant l’exécution de l’estimation et ensuite ils ont appliqué un algorithme basé sur les moindre carrés et une formule simple pour l’operateur dérivé de sorte que les conditions de panne interne possible de la machine peuvent être détectés ainsi que le bruit et les mauvaises détections sont rejetées. Afin d’illustrer le potentiel de l’algorithme, ils ont appliqué cette méthode pour l’usage sur une interface graphique (GUI) C++ où la saturation des inductances a été prise en considération.
15
I.5 METHODES VALIDES POUR L’ESTIMATION PARAMETRIQUE
ON-LINE
I.5.1
REPONSE EN FREQUENCE EN LIGNE (ON-LINE FREQUENCY RESPONSE)Les essais de la réponse en fréquence en ligne (OLFR) constituent une variante qui tend à surmonter les problèmes liés aux tests de SSFR ; ici, la machine est testée dans les mêmes conditions que celles dans lesquelles le modèle devrait être modélisé, mais sur une plage de fonctionnement restreinte. La machine peut fonctionner à proximité d’une charge nominale ou réduite.
La réponse en fréquence est obtenue en appliquant des signaux sinusoïdaux à l’excitation et en mesurant le changement de la tension et le courant d’excitation dans le régime permanent, vitesse rotorique, tension nominale et puissances active et réactive.
Dans cette approche, la réponse en fréquence en ligne des systèmes de puissance est d’abord calculée en utilisant les valeurs des paramètres estimés de la machine synchrone. Ensuite, une technique itérative qui tente de minimiser les différences entre les réponses mesurées et calculées à des fréquences spécifiques en ajustant les paramètres appliqués du modèle de la machine. Le comportement dynamique du système de puissance est simulé avec une modélisation de différents degrés; le détail des diverses représentations est en fonction de l’importance des éléments spécifiques et l’influences sur les essais.
Les études menées [18, 21,22], prouvent que cette technique est avérée pour compléter les résultats des tests de SSFR pour les générateurs avec des enroulements amortisseurs réels. D’autre par, ce qui rend cette technique si particulière est probablement son principal inconvénient. Pour effectuer un test de ce type sur une unité de commande connectée au réseau est un sujet délicat [6]. En outre, cette technique consiste en la simulation de la machine et le réseau auquel elle est connectée ; il n’est pas clair comment les incertitudes dérivées du coté réseau électrique peuvent affecter le processus d’estimation. La structure de base est représentée sur la figure I.3.
Dans cette méthode des simulations utilisant la sortie stimulée de la modélisation de la stabilité transitoire du moteur sont comparées aux données réelles enregistrées pour mettre à jour les paramètres. La structure de cette procédure d'estimation est itérative.
CHAPITRE I ETAT DE L’ART
16
Fig.I.3. Structure de la procédure d’estimation [2].
I.5.2
UTILISATION DE LA REACTANCE OPERATOIRELa méthode d’utilisation de la réactance opératoire utilise une approche hybride, combinant les tests de SSFR avec des tests de court-circuit [60].
Les caractéristiques de la méthode SSFR sont utilisés pour ajuster les réactances Xd (p) et Xq (p)
définies par l'expression (5). Une fois ceci effectué, une transformation exacte est utilisée pour obtenir les paramètres du circuit [61] où les inductances mutuelles de l'axe direct sont réglées à l'aide de la valeur mesurée du courant d’excitation suite à un essai de court-circuit.
Bien qu'aucun résultat démontrant la performance des paramètres qui ont été fournis, il est clair que cette approche est en mesure d'intégrer les meilleures qualités des deux procédures SSFR et de l’essai de court-circuit conventionnel.
I.5.3
IDENTIFICATION AVEC UNE CHARGE ACTIVELa conception et l'analyse d'un système constitué d'un générateur synchrone à vitesse variable qui alimente un onduleur par l'intermédiaire d'un redresseur à diodes triphasé nécessite une modélisation adéquate à la fois en domaines temporel et fréquentiel.
A titre d'exemple, la commande en boucle des systèmes est difficile à concevoir sans un modèle précis; en même temps, la conception de la protection des systèmes nécessite un important signal de modélisation transitoire.
17
La particularité du système décrit est la robustesse du redresseur à diodes en fonctionnement non idéal ; en conséquence, une grande valeur de l'impédance du générateur synchrone. Ce comportement non idéal influence à la fois sur ces performances en régime permanent et transitoire.
La référence [61] présente un modèle du système qui prend en compte, d'une manière détaillée, la dynamique de la source d'alimentation et la charge, ainsi que pour les effets de l'application non idéale du redresseur à diodes. Le modèle est non linéaire mais modélisé en système à temps continu alors il peut être utilisé pour l'analyse à grands et à petits signaux.
Le modèle développé a été vérifié sur un générateur de 105 kW serti d’un onduleur dont la conception de la tension de commande en boucle ‘’ DC-link’’ a été réalisée avec succès.
Il est démontré qu'une bande passante élevée est nécessaire pour cette commande en boucle afin de réaliser l'adaptation d'impédance entre la source d'alimentation et la charge actif.
I.5.4
ANALYSE DES DONNEES MODELISES (ANALYSIS OF DESIGN DATA) L’amélioration des modèles des générateurs développés à partir des informations de conception ne sont pas un nouveau domaine [62]. Des travaux plus récents, sur l’application de l'analyse par éléments finis paraissent un domaine prometteur de recherche [63]. Un travail important pour l’application de cette technique afin d’obtenir des solutions à l'état stable [64], les caractéristiques de réponse en fréquence [65] et pour dériver les fonctions de saturation [66] à partir des données de conception a montré un bon accord avec les résultats mesurés. D’autres travaux doivent être réalisés pour prouver la cohérence de la méthode à toute conception particulière.En outre, l'importance des effets de rotation et de l'effet de perturbation d'amplitude sur le modèle nécessitent des études supplémentaires [6].
I.5.5
MODELE D’IDENTIFICATION ET ESTIMATION DES PARAMETRES A PARTIR DES DONNEES D’EXPLOITATIONUne nouvelle technique pour modèle d’identification et l’estimation paramétrique d'un générateur turbine à vapeur de 460 MVA à partir des données d'exploitation est présentée [67]. Tout d'abord, les données provenant de petites perturbations d'excitation sont utilisées pour estimer le modèle linéaire paramétrique du circuit d'induit et inducteur de la machine. Par la suite, pour chaque ensemble de données du fonctionnement en régime permanent, les inductances de saturation Lds et Lqs sont identifiées et modélisées en utilisant des estimateurs à