Fictitious domain methods to solve convection-diffusion problems with general boundary conditions
Texte intégral
Figure


Documents relatifs
In works such as [11,16,17,19,24,29], a part of the analysis relies on the construction of 0-forms (i.e. functions) quasi-modes supported in some characteristic wells of the potential
To this end, we give an explicit representation formula, using analytic semigroups, sectorial operators with Bounded Imaginary Powers, the theory of strongly continuous cosine
Asymptotic behavior of the solutions of a nonlinear Robin problem for the Laplace operator in a domain with a small hole: a functional analytic approach. Asymptotic behaviour of
A new simple fictitious domain method, the algebraic immersed interface and boundary (AIIB) method, is presented for elliptic equations with immersed interface conditions.. This
In framework of the fictitious domain methods with immersed interfaces for the elasticity problem, the present contribution is to study and numerically validate the
Moreover, using the version of the De Rham theorem presented in e.g.. for the elasticity problem) A fictitious domain model with similar jump embedded boundary conditions for the
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
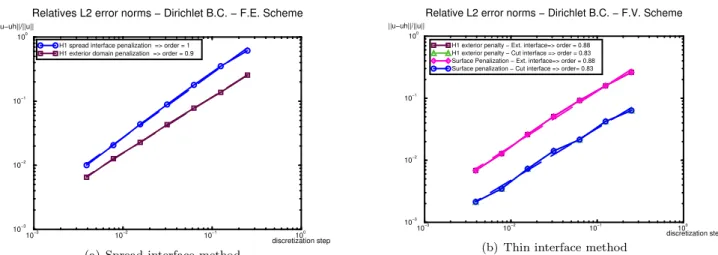
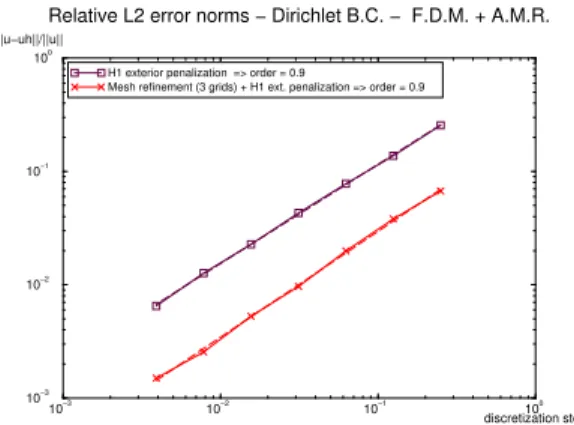
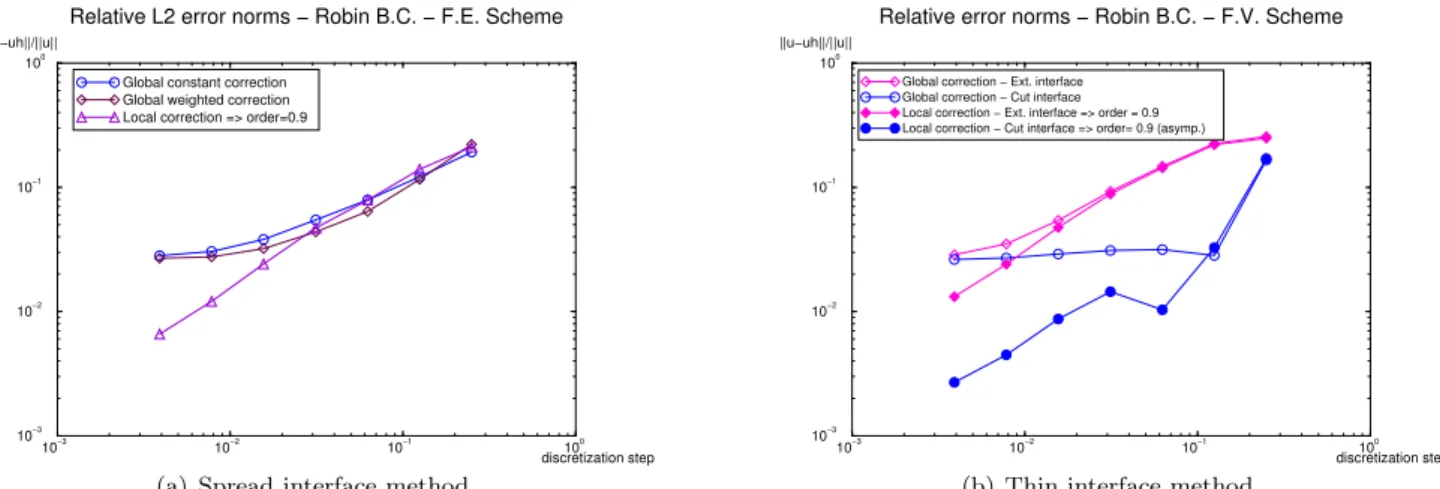
• Although all the methods provide comparable accuracy, a performance degradation, in terms of GMRES con- vergence, occurs in some cases when the polynomial reconstructions
