Contract-based safety verification for autonomous driving
Texte intégral
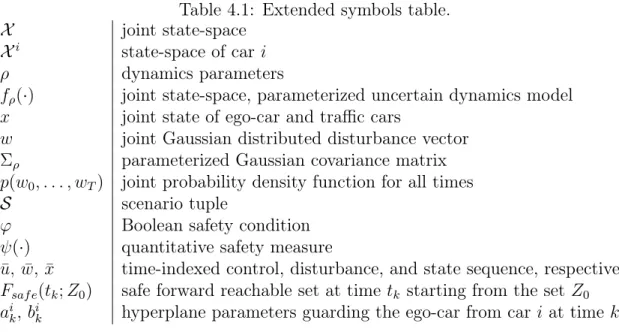
Figure



Documents relatifs
Consider a safe state xκ at time tκ = κτ , a desired system control uκdes and assume that all new vehicles enter the supervision area safely with a margin τ.. Note that this
Such environment enables the verification of both (i) prop1 , equivalent to the “transformability” of the input model (w.r.t the transformation intent) and (ii) prop2 , equivalent
Keywords: Statistical Model Checking, Simulation, Autonomous Vehicle, Controller.. Intelligent Transport Systems (ITS) address the numerous challenges faced by the design of
Automatic method. From the same model Collision_SI the automatic method returns three strategies. For example, our strategy makes use of the two defined interventions brake_base
In the MIRAS study, after the first iteration (coming after a preliminary risk estimation only considering hazard severity), each hazard and possible recommendations were proposed
Un nouveau modèle sportif, la Kadett GT/E avec moteur 1,8 à injection électronique, est exposé pour la première fois à Genève et sera livrable dès cet été dans notre pays..
We built upon the TIOA framework a formal contract-based theory and we established composi- tionality results that allow reasoning with contracts for the satisfaction of timed
If the owner fails to give car access to the con- sumer after they have made the deposit, Algorithm 3 depicts how the owner is penalized for committing a fraudulent action as SC 2
