A shallow water with variable pressure model for blood flow simulation
Texte intégral
Figure



Documents relatifs
Two major novelties are considered: (i) the diffusion law relating the flux of sediments and the slope of the topography is now nonlinear and involves a p- Laplacian with p > 2
Les résultats montrent que les montages financiers de titrisation ne peuvent pas être un outil pour la gestion de résultat par les dirigeants souhaitant maximiser la valeur
Moreover, we mention that dependence and variance based sensitivity measures can be computed either for any single pixel of the output map, thereby producing spatial maps of
However, the model cannot mirror the different pressure effects on the 3D dendritic macromolecules with variable (with dis- tance from the core) segmental density, thus the
Abstract The aim of this work is the extraction of tannic acid (TA) with two commercial nonionic surfactants, sep- arately: Lutensol ON 30 and Triton X-114 (TX-114).The
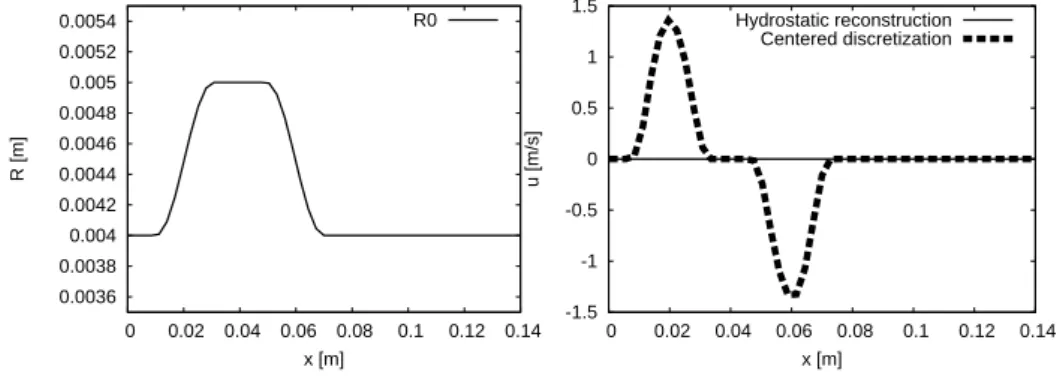
Here we describe a strategy based on a local subsonic steady state reconstruction that allows one to derive a subsonic-well-balanced scheme, preserving exactly all the subsonic
Thacker test case: Comparison of orders of error for the water height h (left) and the discharge q (right) for different schemes at time T =
multi-layer shallow water, nonconservative system, non- hyperbolic system, well-balanced scheme, splitting scheme, hydrostatic reconstruc- tion, discrete entropy
