CAD-consistent adaptive refinement using a NURBS-based Discontinuous Galerkin method
Texte intégral
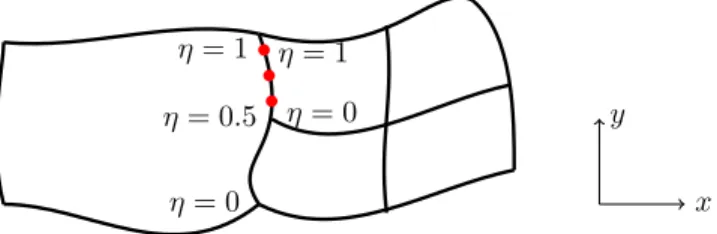
Figure

Documents relatifs
Chapitre IV. 127) Nous synthétiserons ici les réponses obtenues au questionnaire. Cela nous amènera à décrire en un premier temps les caractéristiques sociodémographiques
Ces situations donnent lieu généralement à des activités dites « préparatoires » qui sont signalées dans le manuel de l’élève, qui sont décrites dans le
In the vicinity of the village of Les Ferres (Department of the Alpes-Maritimes, SE France), a relatively thick sedimentary succession with well- preserved ammonites, representative
In this study, we present an analysis of MARV and EBOV seroprevalence amongst blood donors in the Republic of Congo in 2011 and we report associated risk factors for contact with
Under different wind conditions, space and time nonlinear inverse (NLI) control laws have been used to track altitude and airspeed reference trajectories.. Simulation results allow
Regarding practices in the in- dividual buildings, we found that building operation personnel routine- ly tested and inspected the operation of their central emergency
symptomatique chez les patients atteints de formes aiguës et chroniques de glaucome à angle fermé réfractaires au traitement médical, comme il peut réduire le risque d'une
Figure 10 shows the column density projection in every direction as seen by a cell sitting at the center of the turbulent cloud for 12, 40, 84, 144, and 220 directions using the
