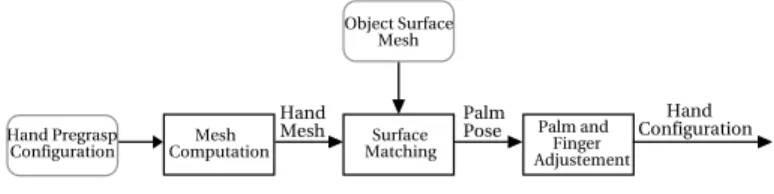
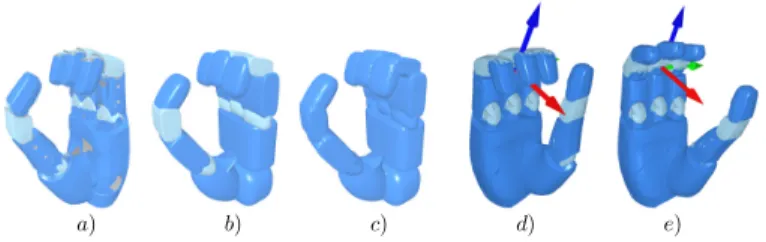
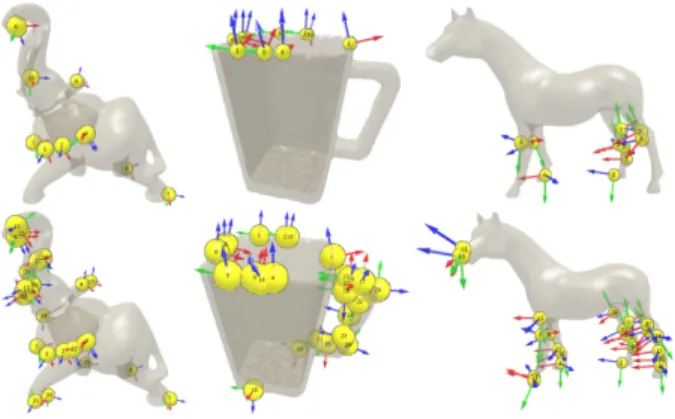
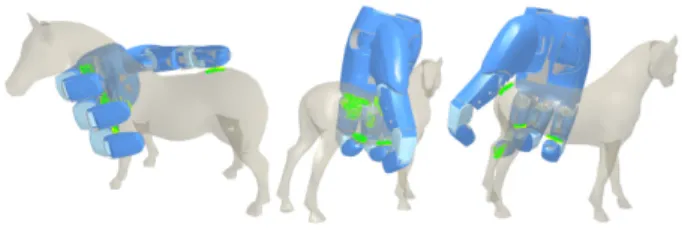
Finding enveloping grasps by matching continuous surfaces
Texte intégral
Figure
Documents relatifs
will enable us to obtain the following general result from which the irreducibility of all but finitely many yn(X) is an immediate consequence. The remainder
However, for evaluating the algorithms in the context of expert finding, we consider a user q to represent the query profile and evaluate similarity results of user pairs (q, x) where
Rigidity results for semilinear elliptic equation with exponential nonlinearities and Moser-Trudinger-Onofri inequalities on two-dimensional Riemannian manifolds, Preprint, 2014.
the flow explores the energy landscape... and shows the non-optimality of the improved criterion.. Demange, Improved Gagliardo-Nirenberg-Sobolev inequalities on manifolds with
Dr Shadd is Assistant Professor, Dr Terry is Assistant Professor, Ms Chevendra is IT Consultant, and Dr Thind is Associate Professor, all at the Centre for Studies in Family
A best practices approach to any endeavour is to start with good enough and raise the bar to achieve excel- lence—because being an excellent doctor should not
[r]
Artificial Intelligence in Legal Assistance task (AILA) task is about using the artificial intelligence to identify the suitable prior documents or statute for the given query
