View planning with positioning system error
Texte intégral
Figure
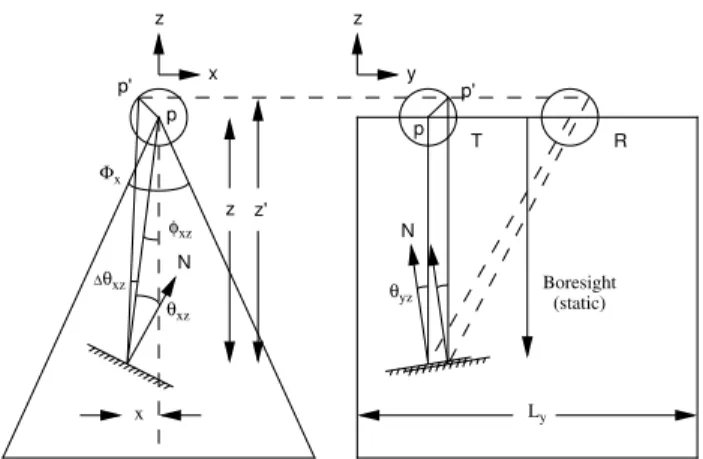
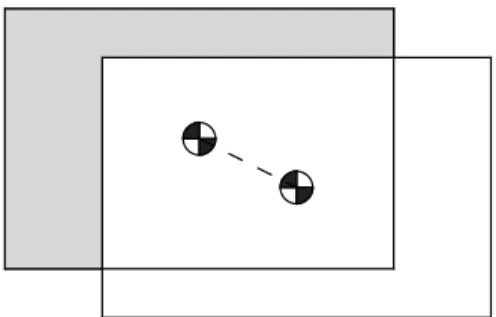
![Figure 1: The Geometric Imaging Environment or global ([24], [12], [7]) scene attributes](https://thumb-eu.123doks.com/thumbv2/123doknet/14203154.480352/2.918.501.810.327.527/figure-geometric-imaging-environment-global-scene-attributes.webp)
Documents relatifs
Le faible taux d'adhésion à la DTAP dans la première année suite à l'angioplastie coronarienne a été documenté par plusieurs études (Bonaca, Bhatt , Oude Ophuis ,
Bien choisir son outil d’extraction de contenu passe donc non seulement par le choix et la configuration des outils en fonction des sources, mais aussi par des comparatifs et
Here we study the impact of strong coupling strength, given by the Rabi splitting energy (ħΩ R ), on the thermody- namic parameters associated with the transition state of
To minimize the likelihood of unintentional racism, mental health professionals should be continually vigilant for unexamined beliefs and assumptions that might disqualify
e Also at Department of Physics, California State University, Fresno CA, United States of America. f Also at Novosibirsk State University,
In the context of the CRISMA FP7 project we have developed a seamless decision support concept to connect simulated crisis scenarios and ag- gregated performance indicators
Inspired by this idea, our approach to finding the optimal camera position can be described informally as follows: First of all, we compute the covariance axes for all
The main contributions of this paper are: (i) a unified view of LTL synthesis and various forms of LTL / LTL f plan synthe- sis in terms of game structures; (ii) complexity results
