HAL Id: hal-02594503
https://hal.inrae.fr/hal-02594503
Submitted on 15 May 2020
HAL is a multi-disciplinary open access
archive for the deposit and dissemination of
sci-entific research documents, whether they are
pub-lished or not. The documents may come from
teaching and research institutions in France or
abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est
destinée au dépôt et à la diffusion de documents
scientifiques de niveau recherche, publiés ou non,
émanant des établissements d’enseignement et de
recherche français ou étrangers, des laboratoires
publics ou privés.
Développement de modules de communication pour la
coopération de robots mobiles en milieu naturel
A. Abonnat
To cite this version:
A. Abonnat. Développement de modules de communication pour la coopération de robots mobiles en
milieu naturel. Sciences de l’environnement. 2010. �hal-02594503�
MÉMOIRE EN VUE DE L’OBTENTION DU TITRE D’INGÉNIEUR
DÉPARTEMENT : GÉNIE ELECTRIQUE
ET
DU MASTER RECHERCHE MSIR
____________________________________
Développement de modules de communication
pour la coopération de robots mobiles en milieu
naturel
Présentée par
Arnaud ABONNAT
Tuteur industriel : M. Gil De Sousa
____________________________________
Juin 2010
Cemagref de Clermont-Ferrand
Campus universitaire des Cézeaux
24 avenue des Landais
BP50085
63172 Aubière cedex
CemOA : archive ouverte d'Irstea / Cemagref2
CemOA : archive ouverte d'Irstea / CemagrefRésumé
Ce stage intitulé « Développement de modules de communication pour la coopération
de robots mobiles en milieu naturel » est proposé par le centre de Clermont-Ferrand du
Cemagref, institut de recherche en sciences et technologies pour l’environnement. Ma
dernière année de formation d'école d'ingénieur à Polytech'Clermont-Ferrand en génie
électrique et la formation de Master Recherche deuxième année MSIR, (modèles,
systèmes, imagerie, robotique) correspondent au profil requis. Au sein de l'équipe
COPAIN animée par M. Jean-Pierre Chanet, mon objectif est le développement de
modules de communication sans fil par ZigBee assurant une qualité de service. La
solution proposée repose sur l'adaptation d'un capteur sans fil nommé LiveNode
habituellement utilisé dans les réseaux de capteur sans fil (RCSF). Un module simulant
une flotte de véhicules est également proposé afin d'étudier l'impact de la
communication sur la régulation de la flotte. Du 15 février au 14 août 2010, mon maître
de stage M. Gil De Sousa du Cemagref et mon tuteur de stage M. Lounis Adouane de
Polytech'Clermont-Ferrand s'assurent de l'avancement de mes travaux.
Abstract
This training course entitled " Development of modules of communication for the
cooperation of mobile robots in natural environment " is proposed by the Cemagref
center at Clermont-Ferrand. It is a research institute in sciences and technologies for the
environment. My last year of training of engineering school at
Polytech'Clermont-Ferrand in electric engineering and the training of the second degree at Master's MSIR,
(models, systems, imaging, robotics) corresponds to the required profile. Within the
team Copain manager by Mr. Jean-Pierre Chanet, my objective is the development of
modules of wireless communication by ZigBee assuring a quality of service. The
application is an adaptation of LiveNode usually used in the networks of wireless sensor
(WSN). A module simulating a fleet of vehicle is also proposed to study communication
the regulation of the fleet. Of February 15th in 14 August 2010, Mr. Gil De Sousa of
Cemagref and Mr. Lounis Adouane of Polytech'Clermont-Ferrand make sure of the
progress of my works.
CemOA: archive
ouverte
d'Irstea
4
Remerciement
Je remercie la direction du Cemagref de Clermont-Ferrand pour m'avoir permis de
réaliser mon stage de fin d'études d'école d'ingénieur au sein d'une équipe de recherche.
Je tiens à remercier tout particulièrement Gil De Sousa, mon maître de stage, et Roland
Lenain, « co-maître » de stage, pour l'attention avec laquelle ils ont suivi mon travail
ainsi que pour leur aide et la disponibilité qu'ils m'ont toujours manifestée.
Mes remerciements s'adressent également à Aurélien Jacquot pour ses nombreux
conseils, sa sympathie et sa bonne humeur qui contribuent au bon déroulement de mon
stage.
Merci également à toute l'équipe du Cemagref, particulièrement aux membres de la
pause café pour l'accueil qu'ils m'ont réservé.
Enfin, je profite de ce mémoire pour remercier M. Jacques Lafond et M. Michel James
pour m'avoir soutenu lors des deux ans nécessaires à valider ma première année à
Polytech'Clermont-Ferrand.
CemOA : archive ouverte d'Irstea / CemagrefTable des figures
Figure 1 : La plateforme de robots mobiles ... 9
Figure 2 : Diagramme d'un véhicule ... 10
Figure 3 : Emplacement des capteurs sur le robucarTT... 10
Figure 4 : LiveNode première version ...11
Tableau 1 : Couches physique du protocole de communication IEEE 802.15.4 (2006)
[ZIGBEE 10]... 12
Figure 5 : AT91SAM7S256 Block Diagram [ATMEL 05] ... 13
Figure 6 : Diagramme AROCCAM ... 14
Figure 7 : Symétrie /Asymétrie d'une communication ... 16
Figure 8 : Collision de messages... 16
Figure 9 : Architecture de réseau ... 17
Figure 10 : Zone de couverture d'un réseau ad hoc... 17
Figure 11 : Routage TBRF ... 18
Figure 12 : Routage DSR ... 19
Figure 13 : Routage OLSR... 20
Figure 14 : Routage LAR1... 20
Figure 15 : Bandes passantes ... 21
Figure 16 : Principe d'une mesure OTT ... 22
Figure 17 : Principe d'une mesure RTT ... 22
Figure 18 : Principe d'une mesure RTT avec communications croissantes ... 23
Tableau 2 : Equation pour un filtre à 4 zones ... 24
Figure 19 : Observation des nœuds voisins, (1) directe, (2) indirecte, (3) rapporté ... 26
Figure 20 : Ordonnanceur par priorité ... 26
Figure 21 : Ordonnanceur SFQ... 27
Figure 22 : Ordonnanceur CBQ ... 27
Figure 23 : Ordonnanceur HTB ... 27
Figure 24 : Architecture logiciel du module de communication... 29
Figure 25 : Structure d'une trame ... 30
Figure 26 : Machine d'état de la fonction de réception ... 31
Figure 27 : Identifiant des différends nœuds ... 32
Figure 28 : Résultat d'une communication LiveNode vers Ordinateur... 33
Figure 29 : Résultat d'une communication Ordinateur vers LiveNode... 33
Figure 30 : Description du modèle... 34
Figure 31 : Fonction de commutation lisse... 35
Figure 32 : Calcul de la nouvelle trajectoire ... 36
Figure 33 : Trajectoire sans suivi et sans communication ... 37
Figure 34 : Trajectoire avec suivi et sans communication ... 37
Figure 35 : Trajectoire avec suivi et communication à 1% d'erreur ... 38
CemOA
: archive
ouverte
d'Irstea
6
SOMMAIRE
Table des figures ... 5
Introduction ... 7
I Présentation des organisations ... 8
I.1 Cemagref ... 8
I.2 Polytech'Clermont-Ferrand... 8
I.3 Master ... 8
II Contexte de l’étude ... 9
II.1 Plateforme robot mobile... 9
II.2 Capteur sans fil LiveNode...11
II.3 Logiciel AROCCAM ... 13
III Etat de L'art sur les réseaux ad hoc... 15
III.1 Problématique de la couche physique... 15
III.2 Problématique du routage ... 16
III.3 Définition de la qualité de service ... 20
III.3.1 Estimateur de bande passante... 21
III.3.2 Congestion d'un réseau... 25
III.3.3 Ordonnancement d’envoi de message... 26
IV Module de communication ... 29
IV.1 Architecture logicielle du module de communication ... 29
IV.2 Ordonnanceur du module de communication ... 32
IV.3 Expérimentations réalisées et résultats... 33
V Modélisation de la communication sans fil ... 34
V.1 Présentation du système et de l'objectif de la simulation ... 34
V.2 Description du modèle de simulation ... 34
V.3 Améliorations apportées au modèle de simulation... 35
V.4 Simulations réalisées et résultats ... 36
Conclusion ... 39
Bibliographies / Références... 40
Annexes ... 42
CemOA : archive ouverte d'Irstea / Cemagref
Introduction
L'agriculture moderne doit répondre aux besoins d'une population de plus en plus
importante. Afin d'accroitre la productivité, des machines agricoles de plus en plus
imposantes sont ainsi développées. Cependant, l'impact environnemental et les
contraintes mécaniques ont augmenté avec la taille de ces machines. Une des
alternatives proposées par le Cemagref est le développement d'une flotte de véhicules
qui collaborent, de manière autonome, pour réaliser une tâche agricole. Pour cela, les
travaux sur le guidage de véhicule le long d’une trajectoire, grâce aux mesures de
capteurs proprioceptifs et intéroceptifs, doivent être poursuivis. De plus, le pilotage
d'une flotte demande un échange d'information entre les véhicules. Les modules de
communication développés par mes soins seront ainsi embarqués sur chaque véhicule.
L'ensemble des modules forment un réseau similaire à un réseau de capteurs sans fil. La
recherche d’une communication avec un certain niveau de qualité de service, m’a
amené, dans un premier temps, à réaliser un état de l'art sur les réseaux de capteurs sans
fil ainsi que des méthodes de mesure et d'estimation du débit d'information voire, bande
passante disponible. Une politique de qualité de service a été implantée sur les modules
constitués d'un microcontrôleur et d’une puce de communication ZigBee. En parallèle
du développement des modules, j'ai programmé une interface pour le logiciel
AROCCAM. Pour étendre ces recherches sur l'influence de la qualité de la
communication dans le contrôle d'une flotte de véhicules, j'ai développé un module
dédié à la communication sans fil dans un modèle de simulation de flotte de véhicules.
CemOA
: archive
ouverte
d'Irstea
8
I Présentation des organisations
I.1 Cemagref
Le Cemagref, institut de recherche en sciences et technologies pour l’environnement,
est un établissement public à caractère scientifique et technologique (EPST) français au
même titre, par exemple, que l’INRA (Institut National de Recherche Agronomique). Il
est placé sous la double tutelle des ministères en charge de la Recherche et de
l'Agriculture. Il collabore avec d'autres organismes de recherche, universités, industriels
et collectivités territoriales sur les thématiques environnementales. Ses recherches
portent notamment sur la qualité des eaux de surface, la biodiversité, les technologies
vertes, le développement territorial, l'économie de l'environnement, les écotechnologies.
Le Cemagref dispose de neuf centres en métropole dont celui de Clermont-Ferrand et
deux antennes à Strasbourg et en Martinique. Le centre de Clermont-Ferrand, qui est
sous la direction de Mme Anne Rizand, possède un site au Cézeaux d'Aubière et un
second à Mondoldre. Les agrosystèmes, les dynamiques de l’environnement et
territoriales des espaces ruraux sont les thématiques de recherche abordées au centre de
Clermont-Ferrand. Les trois équipes Carac'Terre, Copain et Team de l'Unité de
Recherche Technologies et systèmes d'information pour les agrosystèmes (UR TSCF)
du département Ecotechnologies sont réparties sur les deux sites.
I.2 Polytech'Clermont-Ferrand
Polytech'Clermont-Ferrand anciennement C.U.S.T. forme des ingénieurs au sein de
l'université Blaise Pascal depuis 1969. Chaque année, plus de 200 élèves obtiennent le
titre d'ingénieur. La spécificité de l'école de Clermont est de regrouper plusieurs
disciplines dans les cinq départements que sont le génie biologique, le génie civil, le
génie électrique, le génie mathématique et modélisation et le génie physique. Le
département génie électrique, dirigé par M. Khalil El Khamlichi Drissi, propose une
formation complète dans son domaine en adéquation avec les besoins du monde
industriel. Les différents stages et projets ainsi que les conférences d'industriels sont
quelques uns des liens tournés vers les entreprises. Des enseignements avec des aspects
plus théoriques comme l'automatisme, le traitement de l'information sont aussi
prodigués. De plus, Polytech'Clermont-Ferrand propose aux élèves de suivre une
formation de Master Recherche en parallèle à leur dernière année d'étude.
I.3 Master
Le Master Recherche MSIR (modèles, systèmes, imagerie, robotique) a pour objectif de
former de futures doctorants en leur transmettant la méthodologie et la technique en leur
proposant quatre parcours, que sont la recherche opérationnelle et productique, les
systèmes d'information et de communication, l'imagerie-vision et la
robotique-perception.
CemOA : archive ouverte d'Irstea / CemagrefII Contexte de l’étude
La réalisation d'une tâche agricole dans un champ nécessite généralement le passage de
plusieurs engins comparables à une flotte de véhicules. Le pilotage des engins de façon
automatique implique l'échange d'information. Dans le cadre du Cemagref, la flotte sera
constituée d'un tracteur qui jouera le rôle de véhicule guide et de deux plateformes
robots mobiles qui le suivront. Le développement des modules est réalisé de manière
générique pour pouvoir étendre l'application à un nombre plus important de véhicules
(Contrainte de la flotte,...). Les informations échangées seront transmises du module de
communication à un ordinateur (calculateur) embarqué qui réalisera la régulation de
trajectoire du véhicule. Le programme pour piloter les plateformes mobiles sera
développé avec le logiciel AROCCAM (Architecture d'Ordonnancement de Capteurs
pour la Création d'Algorithmes Modulaires). Une interface spécifique est également
développée pour relier le module de communication au logiciel AROCCAM. De plus, le
module développé durant le stage, se base sur l'expérience de l'équipe COPAIN et sur
leurs travaux déjà menés sur les réseaux de capteurs intelligents sans fil (RCSF). On
pourra notamment s’appuyer sur les travaux de M. Aurélien Jacquot réalisés durant sa
thèse intitulée « Supervision de réseaux d’Objets Intelligents Communicants sans fil »
basés sur un capteur intelligent nommé LiveNode.
L'idée directrice du stage est l'adaptation de ces capteurs, au rôle de module de
communication, embarqués sur les plateformes robots mobiles. Cette nouvelle
fonctionnalité impose un changement sur le réseau qui devient de type MANET. Un état
de l'art sur les réseaux ad hoc a été, dans un premier temps réalisé, suivi d'une
familiarisation avec le matériel électronique et les outils de développement disponibles.
II.1 Plateforme robot mobile
Figure 1 : La plateforme de robots mobiles
Les deux véhicules que le Cemagref utilise sont un robucarTT et un robuFAST (voir
Figure 1) de chez Robosoft. Ces solutions de plateforme mobile sont conçues pour des
déplacements rapides (6 m/s) en terrain naturel comme les champs agricoles. Un
ordinateur avec un système d'exploitation Ubuntu est embarqué sur chaque véhicule. Il
remplit le rôle de calculateur pour piloter la plateforme. Le logiciel AROCCAM remplit
le rôle d'interface entre les capteurs proprioceptifs, intéroceptifs et les actionneurs. Le
module de communication développé se comporte comme un capteur pour ce logiciel
(voir Figure 2).
CemOA : archive ouverte d'Irstea / Cemagref10
Figure 2 : Diagramme d'un véhicule
Des équipements ont été rajoutés sur le robucarTT sur le site des Cézeaux (voir Figure
3). En voici une liste non exhaustive :
- un GPS avec correction centimétrique, (1);
- un radar, (2);
- une caméra, (3);
- un télémètre, (4);
- un modem Wi-Fi.
Figure 3 : Emplacement des capteurs sur le robucarTT
Notre projet équipe la plateforme d'un nouvel élément. Le module de communication
CemOA
: archive
ouverte
d'Irstea
est une adaptation d'un capteur sans fil nommé LiveNode à notre application.
II.2 Capteur sans fil LiveNode
Le LiveNode (ou LIMOS Versatile Embedded wireless sensor Node) développé par le
laboratoire LIMOS est un nœud de RCSF ou capteur sans fil. Un microcontrôleur
ARM7TDMI AT91SAM7S256 d’ATMEL Corporation permet de piloter différents
capteurs de grandeur physique ou dispositifs de mesure. Il peut également réaliser la
sauvegarde des données collectées par les capteurs et calculer de nouvelles informations
à partir de celles-ci. Une puce XBee ou XBeePro remplit le rôle de medium radio. Elle
communique avec le microcontrôleur par liaison série. Un module GPS peut lui être
également ajouté. Le LiveNode a pour vocation d’être utilisé comme un capteur
intelligent avec une longue autonomie (voir Figure 4).
Figure 4 : LiveNode première version
Une nouvelle version du LiveNode est actuellement en développement. Une carte
électronique munie du même microcontrôleur ARM7 et d’une puce XBeePro servira
d’élément de base ou de carte mère. Des cartes filles avec des dispositifs de mesure
seront connectées et pilotées par bus I²C à la carte mère. Afin que notre projet puisse
utiliser cette nouvelle version, une carte fille spécifique est à développer. Elle jouera le
rôle d'interface Entrée/Sortie.
La puce XBeePro est une solution technique répondant aux caractéristiques de la norme
ZigBee [ZIGBEE 10]. La spécification ZigBee décrit un protocole propriétaire pour
communiquer par radiofréquence s'appuyant sur la norme IEEE802.15.4. La norme
ZigBee prévoit l'utilisation de trois bandes de fréquence (868, 915 et 2400 MHz). La
gamme de fréquence de la puce XbeePro est de 2400 MHz. Cette norme a été
développée pour des applications industrielles à bas coût, une longue autonomie, un
faible débit et à moyenne portée. Les principaux paramètres de la couche physique sont
CemOA
: archive
ouverte
d'Irstea
12
décrits dans le tableau 1.
La portée théorique d'une puce XBeePro est de 1500m dans un espace libre d’obstacle
[XBEE 06]. La configuration de la puce permet notamment le choix du canal de
fréquence parmi les 16 disponibles de la bande de 2400 MHz. Il est aussi possible
d'attribuer une adresse à la puce et de désigner l'adresse d'une autre. Cela forme un
couple de puces communicantes implémentant un mode point-à-point. Le changement
de couple nécessite une reprogrammation de la configuration. Ce changement
demandant plusieurs secondes, le choix a été fait d'utiliser le mode « diffusion » (ou
« broadcast »). Un mécanisme de retransmission en cas de collision est présent. Le
nombre de tentatives de retransmission peut être choisi. Notre application utilise, par
défaut, trois tentatives. La configuration du port série est celle par défaut : 9600 b/s,
sans bit de parité et avec un bit de stop. Un buffer d'une capacité de 100 octets se trouve
en entrée du port série afin d'attendre la disponibilité de l'antenne partagée entre les
opérations d’envoi et de réception. Dans le cas où la bande passante se révèlerait
insuffisante, il est possible d'augmenter le débit du port série et/ou d'ajuster le nombre
de tentatives de retransmission.
Tableau 1 : Couches physique du protocole de communication IEEE 802.15.4 (2006)
[ZIGBEE 10]
Le microcontrôleur AT91SAM256 de chez ATMEL Corporation était déjà utilisé dans
des prototypes de capteurs intelligents du Cemagref (voir Figure 5). Les caractéristiques
qui ont amené à son choix lors du prototypage du capteur sont multiples [ATMEL 05].
Il intègre une mémoire flash de 256 Ko permettant de sauvegarder les données
collectées par les dispositifs de mesure. Il dispose de deux liaisons séries universelles
asynchrones (USART). Ces liaisons permettent de communiquer avec un module GPS,
facultatif, pour l'un et, le reste du réseau pour l'autre via la puce XBee. Sa fréquence de
fonctionnement est de 50 MHz et sa tension d'alimentation est de 3.3V.
Dans la configuration qui nous intéresse, dite de module de communication sans fil, le
microcontrôleur réalise la gestion du réseau avec la notion de qualité de service. L'un
des USART(s) est toujours relié à la puce XBeePro. L'autre relie le nœud devenu
CemOA
: archive
ouverte
d'Irstea
module de communication au PC avec l'interface logiciel AROCCAM.
Figure 5 : AT91SAM7S256 Block Diagram [ATMEL 05]
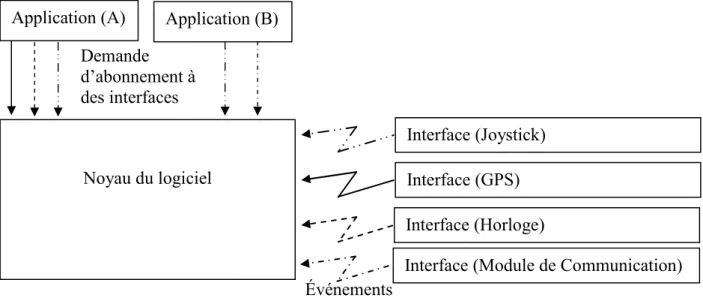
II.3 Logiciel AROCCAM
L'architecture d'ordonnancement de capteur pour la création d'algorithmes modulaires
(AROCCAM) est née d’une collaboration entre le Lasmea et le Cemagref [TESSIER
06]. Ce logiciel centralise les données capteurs et réalise une fusion de données pour
notamment les algorithmes de pilotage de véhicules. Cette architecture multitâche et
événementielle est légère en temps d'exécution. Une application possède une fonction
permettant de s'abonner à des interfaces et des fonctions programmes. Au lancement
d'AROCCAM, son noyau liste les différents abonnements propres à chaque application,
puis attend les événements des interfaces. Une fois qu'un événement est détecté, les
données de l'interface sont transmises aux applications qui disposent d’un abonnement
et les fonctions programmes des applications associées sont exécutées.
CemOA
: archive
ouverte
d'Irstea
14
La version d'AROCCAM utilisée est la version 1.12 fonctionnant avec le système
d'exploitation Ubuntu 8.0.4. Ce couple Ubuntu-AROCCAM correspond à la
configuration des applications déjà développées pour le pilotage du RobucarTT. Le
programme de l'interface n'est pas exportable sur une version plus récente du logiciel.
Le module de Communication n'est pas un capteur natif d'AROCCAM et nécessite donc
le développement d’une nouvelle interface (voir Figure 6).
Figure 6 : Diagramme AROCCAM
Noyau du logiciel
Application (A)
Interface (Joystick)
Application (B)
Interface (GPS)
Interface (Horloge)
Interface (Module de Communication)
Demande
d’abonnement à
des interfaces
Événements
CemOA : archive ouverte d'Irstea / CemagrefIII Etat de L'art sur les réseaux ad hoc
Les réseaux ad hoc sont des réseaux sans fil dans lequel les nœuds s'organisent par
eux-mêmes pour établir les communications au sein du réseau. Une forte dynamique dans
leur organisation caractérise les réseaux ad hoc. Les nœuds susceptibles d’appartenir à
un tel réseau sont souvent mobiles, d'autant plus s'ils sont embarqués sur des véhicules.
L'arrivée ou le départ d'un nœud dans le réseau est alors fréquent. On retrouve les
termes MANET (Mobile Ad hoc NETwork) ou VANET (Véhicule Ad hoc NETwork)
dans plusieurs publications [LABIOD 06]. Dans les réseaux ad hoc, des problématiques
déjà présentes dans les réseaux filaires, comme le routage, sont encore plus complexes à
résoudre.
III.1 Problématique de la couche physique
Les réseaux sans fil hertzien utilisent l'air comme médium de communication. La
propagation des ondes électromagnétiques est conditionnée par l'antenne utilisée
pouvant être omnidirectionnelle ou directionnelle.
La portée radio D d'une antenne, dans les conditions d'un espace libre de tout obstacle,
suit l'équation suivante :
Pr
4
Gr
Ge
Pe
D
×
×
×
×
=
π
λ
Où
λ
est la longueur d'onde, Pe et Pr sont respectivement la puissance émise et celle
reçue, Ge et Gr sont respectivement le gain isotrope de l'antenne de l'émetteur et de
celle du récepteur.
La réflexion des ondes, liée à la présence d’obstacles, diminue la portée précédemment
calculée. La zone de couverture d'une antenne correspond à l'espace dans lequel un
récepteur reçoit une puissance égale ou supérieure à sa puissance de réception.
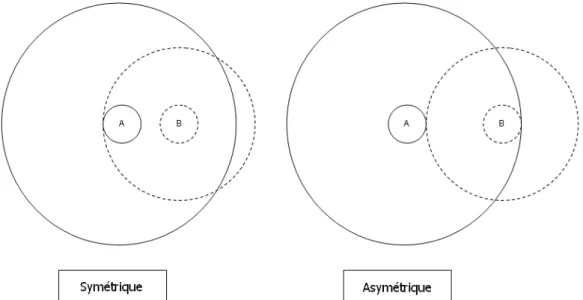
Selon la puissance de chaque nœud, un problème d'asymétrie peut apparaître. La
communication est symétrique entre deux nœuds lorsqu'ils se trouvent chacun dans la
zone de couverture de l'autre. Elle est asymétrique quand l'un des deux nœuds n’est pas
dans la zone, et elle devient coupée si aucun des deux n’est à portée l’un de l'autre (voir
Figure 7). Une communication symétrique est donc nécessaire pour qu'elle soit
bidirectionnelle [LABIOD 06].
CemOA : archive ouverte d'Irstea / Cemagref16
Figure 7 : Symétrie /Asymétrie d'une communication
La problématique des collisions de messages demeure la même que pour un réseau
filaire. Dans le cas de communications sur un seul canal de fréquence, des règles
permettent d'éviter une collision. Deux nœuds ne peuvent pas émettre en même temps,
s'ils sont mutuellement à portée. En outre, un nœud ne peut recevoir deux signaux en
même temps (voir Figure 8).
Figure 8 : Collision de messages
III.2 Problématique du routage
Le mécanisme d'acheminement d'un message d'un point à l'autre du réseau correspond
au routage. Il consiste à choisir le chemin reliant deux points du réseau. L'architecture
centralisée hiérarchisée s'oppose à l'architecture décentralisée multipoint complexe (voir
Figure 9). Un réseau centralisé permet de simplifier le routage. Les nœuds de niveaux
supérieurs centralisent les communications partant des niveaux inférieurs. Il suffit alors
que chaque nœud central connaisse ses voisins. Le goulot d'étranglement des nœuds
centraux provoque un fort risque de saturation. Afin de comprendre les différents
mécanismes en jeux et les méthodes pouvant être mises en place pour éviter les risques
mentionnés, une étude sur les différents protocoles de routages existants a été menée.
L'architecture multipoint complexe admet plusieurs routes possibles pour relier deux
points. La complexité du routage vient du choix du meilleur chemin parmi la multitude
CemOA
: archive
ouverte
d'Irstea
possible. L'avantage d'un tel système est de diminuer le risque de saturation du réseau.
Figure 9 : Architecture de réseau
Dans un réseau filaire, l'infrastructure est globalement fixe. Une fois l'architecture
connue, des tables de routage sont créées. La forte mobilité des nœuds des réseaux ad
hoc modifie fréquemment l'architecture. Chaque nœud du réseau est limité par sa portée
d'émission et est donc isolé d'une partie du réseau. La possibilité qu'a chaque nœud de
servir de relais radio permet d'étendre le réseau à l'ensemble des nœuds sous couverture
radio du réseau (voir Figure 10). La stratégie de routage doit être connue par l'intégralité
des nœuds.
Figure 10 : Zone de couverture d'un réseau ad hoc
La problématique du routage des réseaux ad hoc reste ouverte [CHANET1 07]. En effet,
la complexité est multiple :
- l'architecture est fortement dynamique;
CemOA
: archive
ouverte
d'Irstea
18
- la qualité de la communication varie selon la portée de chaque nœud, (notamment les
liens radios asymétriques);
- l'air est un médium ouvert aux perturbations, (bruits radio et obstacles physique);
- les ressources des nœuds sont souvent limitées (puissance de calcul, énergie …);
- le médium radio est peu fiable pour la sécurité.
Les protocoles de routage sont autant abondants que les problèmes rencontrés sont
nombreux. Les protocoles de routage sont répartis en quatre catégories : proactif,
réactif, hiérarchique et géographique [LABIOD 06].
Les protocoles de routage proactifs utilisent des tables de routage comme dans les
réseaux filaires. Afin de remédier au problème des mouvements des nœuds, les tables
sont mises à jour en continue. Ces mises à jour génèrent des communications
supplémentaires afin de maintenir le réseau.
Le protocole TBRPF (Topology Broadcast based on Reverse Path Forwarding) est un
exemple de protocole proactif. Chaque Nœud construit son arborescence menant à tous
les autres nœuds. L'algorithme de Dijkstra permet d'obtenir les routes les plus courtes en
nombre de sauts. Des messages « Hello » sont émis par chaque nœud périodiquement
pour signaler sa présence à ses voisins. Une fois l'arborescente construite, seuls les
changements de voisinage la mettent à jour. Cela permet de limiter la bande passante
utilisée uniquement aux messages de contrôle. La Figure suivante montre les
arborescences de deux nœuds.
Figure 11 : Routage TBRF
Les protocoles de routage réactifs explorent le réseau suite à une demande
d'établissement de communication. Le coût, en termes de communication, de la gestion
du réseau est faible. L'inconvénient d'un tel principe est le temps d'attente lié à
l'exploration.
Le protocole DSR (Dynamic destination-Sequenced Distance-Vector) appartient à cette
catégorie. L'exploration se fait par l’inondation de messages RREQ (Route REQuest)
possédant la liste des nœuds par lesquels ils sont passés. Chaque nœud ne transmet
qu'une fois le message. Une fois que le message RREQ arrive à destination, une réponse
CemOA
: archive
ouverte
d'Irstea
avec un message RREP (Route REPly) est renvoyée au nœud demandeur. Le RREP
possède la route qu'il faudra suivre. Le schéma suivant montre la recherche du chemin
entre le nœud A et le nœud G.
Figure 12 : Routage DSR
Les protocoles hiérarchiques sont destinés aux réseaux avec un grand nombre de nœuds.
Ce type de protocole permet une meilleure dissémination des informations en
regroupant des nœuds dans des sous-ensembles (ou « cluster »). Un nœud est désigné ou
élu maître de chaque sous-ensemble. L'ensemble des nœuds « maître » (ou
« clusterhead ») forment le sous-réseau de niveau supérieur. Le principal avantage de
cette solution est la réduction de la taille des tables de routage. Les protocoles
hiérarchiques sont également efficaces en présence de nœud avec un critère dominant
comme une position fixe ou une zone de couverture plus importante.
Le protocole OLSR (Optimized Link State Routing) est hiérarchique et proactif.
Périodiquement, il réalise la mise à jour des tables de routage par une inondation. Afin
de limiter le nombre de messages de contrôle, certains nœuds sont élus « nœud MPR »
(Multi Point Relay). Leur rôle est de propager l'inondation. Le Réseau s'organise autour
du sous-réseau des MPR comme le montre la Figure 13.
CemOA
: archive
ouverte
d'Irstea
20
Figure 13 : Routage OLSR
Les protocoles géographiques prennent en compte la situation physique des nœuds. Il
est indispensable d'avoir un moyen de localisation. Cette information facilite le routage
en donnant une direction à l'exploration.
Le protocole LAR1 (Location-Aided Routing) est géographique. Il prend en compte la
position que peut avoir le nœud de destination par rapport à sa position connue. Une
surface rectangulaire incluant le nœud émetteur et la zone de probable localisation du
nœud destinataire détermine les nœuds utilisables comme relais. La Figure 14
représente l'acheminement d'un message de A à J. Le nœud J pouvant se déplacer à une
vitesse Vj.
Figure 14 : Routage LAR1
III.3 Définition de la qualité de service
La qualité de service correspond à un niveau d’exigence requis par un client et à une
politique à suivre afin de répondre au mieux à ses attentes [LABIOD 06], [SWEENEY
04]. Les attentes souhaitées dans les réseaux de communication sont fortement
dépendantes de l'application. Un débit d'information infiniment élevé avec un temps de
CemOA
: archive
ouverte
d'Irstea
transfert et un taux d'erreur nul est l'objectif idéal. Les contraintes physiques et
techniques imposent des limites et un compromis entre ces trois objectifs. De plus, afin
d'appliquer une politique satisfaisante, des mesures doivent être réalisées pour estimer
l'état du réseau. Le temps de transfert peut être caractérisé par des mesures du délai
instantané et/ou du délai moyen pour le transfert d'un message entre l’émetteur et le
récepteur. La mesure de la gigue des messages correspondant à une fluctuation des
délais de transfert, est une autre valeur caractérisant le temps de transfert. La qualité du
réseau dépend également du taux d’erreurs. L'erreur peut être de différentes natures :
−
la perte d'un message;
−
la corruption de l'information du message;
−
la mauvaise insertion correspondant à l'arrivée d'un message au mauvais
destinataire.
La qualité du réseau peut être estimée de manière locale entre deux nœuds ou dans un
nœud, ou sur l'ensemble du réseau en interpolant la qualité du chemin entre deux points
du réseau. Le terme de bande passante est souvent utilisé pour parler du débit
d'information d'un réseau. Une liaison entre deux nœuds d'un réseau se caractérise par
une bande passante maximale théorique, une bande passante libre et la bande passante
utilisée (voir Figure 15). La bande passante maximale théorique est fixée par la
technologie choisie, tandis que la bande passante libre est limitée par l'application et
l'environnement de la liaison.
Figure 15 : Bandes passantes
III.3.1 Estimateur de bande passante
Les estimateurs de bande passante sont de type invasif ou non-invasif. Les estimateurs
invasifs reposent sur l'envoi de messages dédiés à la mesure. Ces estimations sont
d'autant meilleures que le nombre de messages de mesures sont nombreux. Il en résulte
néanmoins une diminution de la bande passante maximale utile. Les estimateurs
non-invasifs analysent des informations portées par les messages de la communication
courante. Ils utilisent également des informations sur l'état du nœud.
CemOA
: archive
ouverte
d'Irstea
22
III.3.1.a Les estimateurs de bande passante invasifs
Les estimateurs de bande passante invasifs utilisent la mesure du délai de transmission
d'un message entre l'émetteur et le destinataire. Le délai de transfert varie selon le
nombre de nœuds le long du trajet et la distance les séparant. Les deux méthodes
élémentaires pour cette mesure sont la méthode One-way Trip Time (OTT) et la
méthode Round-Trip Time (RTT) [LAI 99], [AMAM2 07]. La méthode OTT est une
mesure directe du temps entre l'envoi et la réception du message spécifique à la mesure.
Sa mise en œuvre impose que l'émetteur et le destinataire partagent une même base de
temps. Le destinataire mesure le temps entre la date d'envoi fixée et la date d'arrivée du
message spécifique à la mesure (voir Figure 16).
Figure 16 : Principe d'une mesure OTT
La méthode RTT est la mesure du temps entre l'envoi d'un message et la réception d'une
réponse à ce message. L'émetteur envoie un message spécifique. Le destinataire le
reçoit et renvoie un message d'acquittement en réponse (voir Figure 17). Le délai de
transfert est égal à la moitié du temps mesuré, dans l'hypothèse que l'aller et le retour
soient symétriques. Le principal avantage de cette méthode est qu'elle ne nécessite pas
de partager une même base de temps.
Figure 17 : Principe d'une mesure RTT
La formule suivante permet, par exemple, d’estimer la bande passante :
P
RTTf
L
K
BP
×
×
=
(rep.)
P
OTTf
L
K
BP
×
×
×
=
2
Où K est une constante prenant en compte le contexte du réseau. Elle peut varier de 0,87
CemOA
: archive
ouverte
d'Irstea
à 1,31. L est la taille des messages, RTTf (rep. OTTf) est la mesure RTT (rep. OTT)
filtrée et P est le taux de perte.
Le filtre de la mesure RTT est réalisé par la méthode EWMA d'équation :
)
1
(
)
1
(
)
(
n
=
RTTf
n
−
×
λ
+
RTT
×
−
λ
RTTf
(rep.)
OTTf
(
n
)
=
OTTf
(
n
−
1
)
×
λ
+
OTT
×
(
1
−
λ
)
Avec RTTf(n-1) (rep.OTTf(n-1)) la valeur précédente calculée et
λ
le gain du filtre. Si
λ
est proche de 1 le filtre est stable (les nouvelles mesures ont moins d'influence) et si
λ
est proche de 0, le filtre est agile (les nouvelles valeurs influent fortement la valeur
filtrée).
La méthode Train Of Packet Pair (TOPP) et la méthode Self-LOading Periodic Streams
(SLoPS) complètent la méthode RTT. La méthode TOPP envoie successivement deux
messages, tandis que la méthode SLoPS envoie un premier message puis envoie un
second message à la période suivante. La mesure du temps entre la réception des
messages d'acquittement permet d'estimer la bande passante perdue due à des
communications croissantes (voir Figure 18).
Figure 18 : Principe d'une mesure RTT avec communications croissantes
III.3.1.b Les estimateurs de bande passante non-invasifs
Les estimateurs de bande passante non-invasifs ne génèrent aucun message spécifique.
Ils utilisent les informations sur l'état du nœud comme le nombre de message en
transitions ou le temps d'attente dans le nœud. L'hypothèse que le nœud subisse un
goulot d'étranglement au niveau de l'envoi de message permet d'estimer la bande
passante. Dans le cas où il n'y a aucun message dans le nœud, on peut supposer que la
bande passante libre est maximale pour l'envoi de message. Inversement si le nombre de
CemOA
: archive
ouverte
d'Irstea
24
messages stockés augmente, alors la bande passante libre diminue.
La taille d'un message est une information qui peut être mesurée. Il est alors possible de
comparer le nombre d'octets reçus en une seconde au débit maximal théorique. De plus,
les protocoles de communication imposent souvent une encapsulation des données dans
une trame. Une trame dispose d’un entête et de données permettant généralement la
détection d'erreurs de transmission en fin de trame. Le calcul du taux d'erreurs complète
l'estimation. Certains entêtes possèdent la date de l'envoi du message et un identifiant de
message. Une mesure de RTT (ou de OTT) devient possible sans l'utilisation de
message spécifique. Dans le cas d'une application générant des communications en
continue la méthode Non Invasive Manet Bandwidth Estimator (NIMBE) [CHANET2
07] permet d'obtenir une bonne estimation basée sur les formules suivantes :
−
×
−
×
=
2min
2
exp
1
1
max
RTT
RTT
L
BP
BP
(Rep.)
−
−
×
=
2min
exp
1
1
max
OTT
OTT
L
BP
BP
L'ensemble des estimateurs de bande passante sont très sensibles aux pics de variation.
Le filtre Flip-Flop affine l'estimation de manière algorithmique. Selon la variation entre
deux estimations consécutives, l'équation inverse ou non les coefficients d'un filtre
EWMA. L'algorithme 1 est alors utilisé pour le choix de l'équation.
Où BP(x) est la bande passante estimée à l'instant x,
σ
la variance de la bande passante
et
λ
une constantes entre 0,5 et 1.
Le filtre à adaptation de zone est une amélioration du filtre Flip-Flop [AMAM1 04]. Le
nombre de zones sont supérieurs à deux, contrairement au filtre Flip-Flop. La
correspondance zone-équation est résumée dans le Tableau 2.
Tableau 2 : Equation pour un filtre à 4 zones
CemOA
: archive
ouverte
d'Irstea
III.3.2 Congestion d'un réseau
La congestion d'un réseau est la conséquence de la réalisation d’un nombre important de
communications provoquant un ralentissement global de celui-ci. Une congestion peut
être locale ou globale. Des phénomènes non- exhaustifs en sont la cause. Le routage est
naturellement une cause de problèmes comme présenté dans le chapitre précédant. Des
goulots d'étranglement peuvent, par exemple, se trouver au niveau du nœud qui
centralise les communications. Des messages cherchant leur destinataire peuvent se
retrouver bloqués dans une boucle du réseau. Leurs accumulations rendent l'ensemble
des nœuds de la boucle bloquants aux autres communications. Une différence entre le
débit d'entrée et de sortie d'un même nœud, ainsi qu'une différence de débits entre
nœuds sont également une cause de congestion. Le blocage d'un message est également
possible à l'intérieur d'un nœud. Le chapitre suivant sur l'ordonnancement d'envoi de
message développera ce point. Une congestion peut également être due à un acte
malveillant. Un nœud corrompu peut bloquer ou mal rediriger les communications. La
sollicitation d'un nœud par un nombre important de demandes bloquera également les
communications [LABIOD 06]. Si aucune méthode n’est mise en place pour diminuer
voire arrêter la congestion, un problème local est susceptible de rapidement se propager
à l'ensemble du réseau. Limiter le temps passé d'un message dans le réseau est une
méthode courante pour diminuer la congestion d'une boucle. Le temps passé est
généralement mesuré en nombre de sauts du message avec la méthode TTL
(Time-To-Live). De la mémoire peut être rajoutée au nœud pour augmenter la taille des buffers de
réception, de manière à atténuer un pic d'activité. Il est également possible qu'un nœud
ayant rempli son buffer supprime un certain nombre de messages pour alléger le réseau.
En limitant le nombre de messages sur le réseau, la congestion se voit maîtrisée. Il est
possible de fixer le nombre d'envois de messages pour une période donnée, mais des
méthodes permettent d'exploiter le réseau de manière plus optimale. La mesure de la
bande passante libre permet de limiter au minimum l'envoi de messages afin d'éviter la
congestion du réseau.
Les réseaux ad hoc sont difficiles à protéger d'un nœud malveillant. La nature même du
réseau admet l'intégration de nouveaux nœuds. Les méthodes de cryptage sont une
solution pour sélectionner les nœuds entrants mais complexes à mettre en œuvre dans
les réseaux de capteur sans fil.
Une méthode consistant à observer les nœuds voisins et à leur attribuer une réputation
de fiabilité est possible [LABIOD 06]. Les nœuds avec une faible réputation sont peu
sollicités pour le routage. Trois méthodes, utilisant la possibilité d'écoute des nœuds,
sont possibles avec les réseaux sans fils (voir Figure 19) :
•
Le nœud émetteur A demande à B de transmettre un message pour C. Une fois sa
demande faite, le nœud A écoute le nœud B et vérifie qu'il le transmet correctement à C.
Alors A se fait une réputation de B, (méthode directe).
•
Le nœud D écoute ses voisins et entend que B doit transmettre un message à C. Il
vérifie que B transmet correctement à C. Alors D se fait une réputation de B, (méthode
indirecte).
•
Le nœud D écoute ses voisins et entend que B doit transmettre un message à C. Il
vérifie que B transmet correctement à C. Le nœud D finit par transmettre la réputation
de B à ses voisins, (méthode rapporté).
CemOA
: archive
ouverte
d'Irstea
26
Figure 19 : Observation des nœuds voisins, (1) directe, (2) indirecte, (3) rapporté
III.3.3 Ordonnancement d’envoi de message
Les messages dans un réseau n'ont pas tous la même fonction. Les chapitres précédents
ont décrit des méthodes utilisant des messages de contrôles en plus de ceux de
l'application. De plus, les messages de l'utilisateur ne remplissent également pas les
mêmes fonctions. Les nœuds du réseau transmettent indifféremment ces messages ou
utilise un ordonnanceur [DUVAL], [CLAFFY 03]. Ce dernier varie selon les attentes de
l'application. Une file de messages FIFO (First In First Out) permet de sauvegarder les
messages en attendant leur envoi. Cette méthode du moindre effort peut évoluer afin de
privilégier certains messages. Il est courant de caractériser les messages d'une priorité.
L'ordonnanceur se complexifie avec un classement des messages selon leur priorité
(voir Figure 20). Plusieurs files de messages matérialisent le résultat de ce classement.
L'ordonnanceur effectue alors l'envoi par ordre de priorité. Un problème de congestion
apparaît à ce niveau, des messages pouvant être bloqués par l'arrivée en continue de
messages plus prioritaires. Différents ordonnanceurs vont maintenant être présentés.
Leur différence vient généralement des critères de classement et d'envoi des messages
utilisés.
Figure 20 : Ordonnanceur par priorité
La méthode SFQ (Stochastic Fair Queuing) classe toujours les messages par priorité.
L'envoi se fait avec un tirage aléatoire au niveau des files de messages (voir Figure 21).
Des pondérations permettent aux files les plus prioritaires d'être privilégiées. Cette
Priorité
Priorité forte
Priorité
Priorité faible
Critère du
classement
File de messages
Critère
d'envoi
CemOA : archive ouverte d'Irstea / Cemagrefméthode a été proposée pour résoudre le problème de blocage des messages les moins
prioritaires.
Figure 21 : Ordonnanceur SFQ
La méthode CBQ (Class Base Queuing) n'utilise plus la priorité comme critère de
classement, mais la bande passante désirée pour le message (voir Figure 22). Une
mesure de la bande passante disponible en sortie est réalisée. L'envoi est accordé en
priorité aux messages les moins demandeurs de bande passante sous condition que la
bande passante libre est suffisante.
Figure 22 : Ordonnanceur CBQ
La méthode HTB (Hierarchical Token Bucket) utilise le type d'application auquel le
message est dédié (voir Figure 23). Selon les applications, les messages requièrent une
certaine bande passante. L'envoi se réalise comme pour la méthode CBQ.
Figure 23 : Ordonnanceur HTB
Priorité
Priorité forte
Tirage
aléatoire
Priorité faible
50 %
1%
Pondérations
Critère du
classement
File de messages
Critère
d'envoi
Bande
passante
souhaitée
Besoin fort
Besoin et
Bande
passante
disponibl
e
Besoin faible
Critère du
classement
File de messages
Critère
d'envoi
Mesure de la
bande passante
Classement
Téléchargement 6 Mb/s
Interactif 6 Mb/s
Vidéo 4 Mb/s
VoIP 4 Mb/s
Envoi en
fonction
de la
bande
passante
Mesure de la
bande passante
CemOA : archive ouverte d'Irstea / Cemagref28
La méthode CSS (Clark Shenker Shang) classe les messages en fonction de leur besoin
d’arrivée à destination dans un temps borné ou non. L'envoi sera accordé aux messages
ayant le temps d'expiration le plus proche.
CemOA
: archive
ouverte
d'Irstea
IV Module de communication
IV.1 Architecture logicielle du module de communication
La programmation du microcontrôleur AT91SAM7S256 se réalise avec le logiciel de
développement IAR Embedded Workbench Kickstart. Ce logiciel permet la compilation
de codes en langage C et la programmation du microcontrôleur par liaison JTAG. Un
mode « Debug » est accessible pour corriger d'éventuelles erreurs de comportement du
programme. L'application développée doit configurer les périphériques du
microcontrôleur notamment les deux liaisons série asynchrone universel (USART(s)),
ordonner, réaliser l'envoi et la réception de messages sur ces deux liaisons, et assurer un
niveau de qualité de service. La Figure 24 décrit le modèle suivi pour structurer le
logiciel de communication. Un message reçu doit tout d'abord remonter les différentes
couches pour pouvoir être routé, puis redescendre pour être envoyé. La qualité de
service réalise des mesures dans toutes les couches traversées par les messages et
calcule les critères d'envoi.
Figure 24 : Architecture logiciel du module de communication
Le programme est réalisé de telle sorte qu'il puisse être amélioré. Pour cela, l'application
est divisée en plusieurs tâches. La tâche US assure la configuration et l’utilisation des
périphériques USART(s). La tâche TI assure la configuration et l’utilisation des
périphériques Timer(s). Ces deux premières tâches constituent la couche de plus bas
niveau. La couche supérieure est l'ordonnanceur, matérialisé par la tâche OR où est
organisé l'envoi des messages en fonction des données de la qualité de service. La
dernière couche correspond à la tâche RO qui détermine le routage de messages.
CemOA
: archive
ouverte
d'Irstea
30
Parallèlement à cette pile, la tâche QS réalise le relevé des mesures de la qualité de
service et calcule les critères permettant de prendre des décisions à son sujet.
Les fichiers « .h » d'une couche fournissent les interfaces uniquement pour la couche
supérieure. Les interfaces sont constituées par les prototypes des fonctions, des
constantes et définitions de type. Des fonctions sont uniquement dédiées à retourner les
valeurs des variables globales, ceci dans le but de limiter ce type de variables à une
même tâche. Les noms des variables globales, des constantes et des fonctions sont
constitués des deux premières lettres correspondantes à leur tâche associée, puis de
quatre autres lettres désignant leur rôle (une variable globale, une constante, une
fonction). Exemple : US_FUNC_trans_char.
Le fichier Boart.h fait la correspondance entre des étiquettes permettant d'accéder aux
ressources du microcontrôleur et des étiquettes propres à notre application, cela dans le
but de conserver le reste du programme en cas de changement de composant.
Le fichier frame.h définit la structure de la trame dans laquelle sont conservées les
données de la communication. Des informations supplémentaires sont ajoutées aux
données « utilisateur », afin d'assurer le routage, de caractériser le type de données, de
tester l'intégrité des données à leur réception et de propager des informations utiles à la
qualité de service. Actuellement, le réseau ne comprend que deux nœuds sans fils et ne
nécessite pas de champs identifiant le destinataire, mais dans le but de conserver un
certain niveau de généricité, plusieurs champs sont présents dans l'entête.
L'entête comprend les identifiants des différents nœuds acteurs de la communication, le
nombre de sauts possibles avant destruction du message, un critère sur la nature du
message, la date d'envoi et la taille du message (voir Figure 25).
L'identifiant de l'émetteur ID_E correspond au nœud à l'origine du message pour un
destinataire d'identifiant ID_D. Les messages transitent par une succession de couples
de nœuds transmetteur-récepteur d'identifiant ID_T et ID_R.
Le TTL (Time-to-Live) est une valeur initialisée à la création du message et
décrémentée à chaque saut de transmission. Le message est détruit si à sa réception, son
paramètre TTL est nul. Ce fonctionnement a pour but de lutter contre la congestion du
réseau par erreur de routage.
La Critère correspond à la nature du message. Il fait intervenir la notion de priorité et
sera décrite dans le chapitre sur l'ordonnanceur du module de communication.
Le corps de la trame contient les données « utilisateur ». Chaque donnée comprend le
nom de la donnée sur un octet et sa valeur sur quatre autres octets.
De plus, deux octets identifiant les trames de l'application en début de trame et un
checksum en fin de trame ne figurant pas dans la structure sont transmis.
La taille maximale d'une trame est fixée à 100 octets équivalant à la taille maximale du
buffer d'entrée de la puce XBeePro.
Figure 25 : Structure d'une trame
CemOA
: archive
ouverte
d'Irstea
Le fichier usart.c réalise les envois et les réceptions. Les fonctions atomiques utilisées
sont l'envoi d'un octet par appel de fonction et la réception d'un octet par interruption.
L'envoi d'une trame s'effectue par l'envoi successif des octets de la trame. Avant l'envoi
du premier octet, la valeur du checksum est initialisée à zéro, puis, après chaque envoi,
le checksum est calculé en réalisant un « ou-exclusif » entre sa valeur précédente et la
valeur transmise. La fonction d'interruption qui accuse la réception d'un octet, rend
compte également du décodage et de la vérification du checksum des trames. Le
décodage est réalisé à l'aide d'une machine d'états qui évolue à chaque réception d'octet
(voir Figure 26). Le temps passé dans cette fonction d'interruption est court. À chaque
état de la machine, la sauvegarde de l'octet reçu et un calcul du checksum intermédiaire
sont exécutés.
Figure 26 : Machine d'état de la fonction de réception
Une fois qu'une trame est reconnue correcte, elle est sauvegardée en attendant sa lecture
par une autre fonction. La taille mémoire étant limitée, seules les trois dernières trames
de chaque USART sont conservées. L'interface avec la couche supérieure se fait avec
deux fonctions : la fonction d'envoi et la fonction de réception d'une trame.
Le fichier ordonnanceur.c organise l'envoi des messages selon la stratégie expliquée
dans le chapitre suivant « Ordonnanceur du module de communication ». L'interface
avec la couche supérieure se fait avec deux fonctions : la fonction d’insertion et la
fonction de lecture d'une trame.
Le fichier routage.c est actuellement minimaliste. Les trames sont redirigées en fonction
de ID_D. Dans notre application les ordinateurs « PC » avec le logiciel AROCCAM ont
également un identifiant. Le routage se fait avec des identifiants connus d'avance afin de
réaliser des tests. Une version plus complexe avec l'utilisation de protocole routage
CemOA
: archive
ouverte
d'Irstea
32
CIVIC sera à développer pour assurer le fonctionnement d'un réseau ad hoc fortement
mobile.
Figure 27 : Identifiant des différends nœuds
Le fichier QoS.c calcule les paramètres utiles à l'ordonnanceur pour prendre ses
décisions. Le nombre total d'octets, le nombre d'octets d'erreur et le nombre des nœuds
voisins sont les informations nécessaires aux calculs. Ces relevés sont réalisés toutes les
secondes.
IV.2 Ordonnanceur du module de communication
L'ordonnanceur développé reprend le principe des trois phases présentées dans le
chapitre « Ordonnancement d’envoi de message ». Les messages entrants sont, tout
d'abord, classés selon certains critères, puis sauvegardés dans des files de messages,
pour finalement être sélectionnés et envoyés selon d'autres critères. Différentes idées ont
mené à cette solution. La première est le souhait de pouvoir différencier les messages
importants, urgents et normaux. La deuxième est de pouvoir utiliser l'ordonnanceur
comme régulateur de bande passante pour assurer la qualité de service. La dernière est
de réaliser un ordonnanceur suffisamment générique pour être utilisé pour d'autres
applications que la communication entre véhicules.
Les notions d'importance et d'urgence pour un message se retrouvent dans d’autres
applications comme la surveillance médicale. L'urgence fait référence au besoin
d'arriver rapidement. Tandis que la notion d'importance fait référence à la nécessité
d'arriver. Dans un premier temps, nous considérons donc qu'il est acceptable qu’un
message urgent soit perdu. L'hypothèse est, que s'il arrive en retard, alors l'information
est tout de même perdue car le message est obsolète. Il est également acceptable qu'un
message important mette du temps pour arriver voire qu'il reste bloqué et sauvegardé
pour être transmis plus tard. De plus, la notion de priorité reste valable pour les trois
types de messages, (urgents, importants et normaux). Des problèmes apparaissent
lorsqu'on considère le couple type et priorité du message. Ceci ressort également avec le
choix entre l'envoi d’un message normal avec une priorité maximale et l'envoi d’un
message urgent avec la priorité la plus faible. Il est possible alors de voir la priorité
comme une pondération entre types. Afin de simplifier la phase de classement, nous
utilisons des priorités restreintes à chaque type normal. Il devient possible de
caractériser les types et les priorités avec un seul critère correspondant au champ dédié
dans nos trames. La valeur « 0 » désigne les messages urgents, la valeur « 1 » les
importants et les valeurs de « 2 » à « 7 » la priorité des messages normaux. L'envoi
consiste à toujours envoyer les messages urgents. Dans le cas où il n'y a plus de
messages urgents, le taux d’erreurs mesuré par la qualité de service détermine si les
messages importants peuvent être envoyés. Au-delà d'un certain taux d’erreurs, le risque
de perdre un message est trop élevé, donc seuls les messages normaux pourront être
envoyés. L'ordonnanceur remplit également un rôle contre la congestion du réseau. Les
messages normaux sont majoritaires par rapport aux messages urgents et importants. Ils
sont donc la principale source de congestion, d'autant plus si leurs tailles sont
importantes. L'idée mise en place est de bloquer les messages de plus grande taille en
cas de bande passante faible. Un second classement selon la taille est donc appliqué aux
messages normaux.
CemOA : archive ouverte d'Irstea / CemagrefIV.3 Expérimentations réalisées et résultats
Des essais de communication entre le LiveNode et l'HyperTerminal de l'ordinateur par
liaison série constituent les premiers tests de la phase de développement du programme
du nœud. Ils ont permis la validation de l'envoi et de la réception de messages par port
série. La communication LiveNode vers ordinateur est tout d'abord testée avec un
message « Hello » (voir Figure 28).
Figure 28 : Résultat d'une communication LiveNode vers Ordinateur
Le test de la communication ordinateur vers LiveNode consiste à faire répondre le
LiveNode. Un message avec une valeur quelconque est envoyé au LiveNode, qui une
fois reçu, renvoie à l'ordinateur un message avec la valeur incrémentée de un.
Figure 29 : Résultat d'une communication Ordinateur vers LiveNode
Les tests pour valider la communication sans fil par puces XBee nécessitent l'utilisation
d'un second nœud. L'envoi et la réception sont également testés avec un message «
Hello » et une réponse à un message. Le nœud relié à l'ordinateur remplit son rôle
définitif de module de communication, tandis que le second nœud joue le rôle émetteur
de message « Hello » ou de réponse.
Des essais similaires ont été faits une fois que l'interface dédiée au logiciel AROCCAM
fut programmée. Une succession d'essais a permis d'estimer une limite de fréquence
d'envoi en fonction du nombre de données.
L'intégralité des modules a été testée avec une application proche de leurs futures
utilisations. Un Ordinateur avec AROCCAM relié à un LiveNode et à un GPS constitue
une plateforme mobile. L'application transmet des données GPS à une fréquence de 2Hz
par le LiveNode au second LiveNode en position fixe. Un numéro de trame est ajouté
afin de comparer les trames envoyées et reçues.
CemOA
: archive
ouverte
d'Irstea

![Figure 5 : AT91SAM7S256 Block Diagram [ATMEL 05]](https://thumb-eu.123doks.com/thumbv2/123doknet/15042884.692164/14.892.196.714.126.819/figure-at-sam-s-block-diagram-atmel.webp)