ContentslistsavailableatScienceDirect
BioSystems
j ourna l h o m e pa g e :w w w . e l s e v i e r . c o m / l o c a t e / b i o s y s t e m s
Self-organization
in
aggregating
robot
swarms:
A
DW-KNN
topological
approach
Belkacem
Khaldi
a,
Fouzi
Harrou
b,∗,
Foudil
Cherif
a,
Ying
Sun
baLESIALaboratory,DepartmentofComputerScience,UniversityofMohamedKhider,R.P.07000Biskra,Algeria
bKingAbdullahUniversityofScienceandTechnology(KAUST)Computer,ElectricalandMathematicalSciencesandEngineering(CEMSE)Division,Thuwal
23955-6900,SaudiArabia
a
r
t
i
c
l
e
i
n
f
o
Articlehistory:
Received21July2017
Receivedinrevisedform1December2017
Accepted22January2018
Availableonline2February2018
Keywords:
Swarmrobotics
Self-organizedaggregation
SmoothedParticlesHydrodynamics(SPH)
Virtualviscoelasticmodel
Distance-WeightedKNN
a
b
s
t
r
a
c
t
Incertainswarmapplications,wheretheinter-agentdistanceisnottheonlyfactorinthecollective behavioursoftheswarm,additionalpropertiessuchasdensitycouldhaveacrucialeffect.Inthispaper, weproposeapplyingaDistance-WeightedK-NearestNeighbouring(DW-KNN)topologytothebehaviour ofrobotswarmsperformingself-organizedaggregation,incombinationwithavirtualphysicsapproach tokeeptherobotstogether.Adistance-weightedfunctionbasedonaSmoothedParticleHydrodynamic (SPH)interpolationapproach,whichisusedtoevaluatetherobotdensityintheswarm,isappliedasthe keyfactorforidentifyingtheK-nearestneighbourstakenintoaccountwhenaggregatingtherobots.The intravirtualphysicalconnectivityamongtheseneighboursisachievedusingavirtualviscoelastic-based proximitymodel.WiththeARGoSbased-simulator,wemodelandevaluatetheproposedapproach, show-ingvariousself-organizedaggregationsperformedbyaswarmofNfoot-botrobots.Also,wecompared theaggregationqualityofDW-KNNaggregationapproachtothatoftheconventionalKNNapproachand foundbetterperformance.
©2018ElsevierB.V.Allrightsreserved.
1. Introduction
Aggregation is a fundamental behaviourthat is observed in manybiologicalorganisms,suchassocialinsectsandgroup-living animals(Camazineetal.,2002).Itisanimportantrequirementfor animalsocietiestoaccomplishcomplexswarmingbehaviours col-lectively.Thiscanbeachievedusingexternalgradients,suchas humidityforwoodlice(Brolyetal.,2012,2013)ortemperature forhoneybees(Kernbachetal.,2009);thiskindofaggregationis mostlyknownascue-basedaggregation(Arvin etal.,2014b).It canbealsoachievedinself-organizedmanner,wherethe aggrega-tionprocessisenabledwithoutanyexternalcues(Camazineetal., 2002).Fascinatingexamplesof suchbehaviourcanbeobserved in bird flocks, fish schools, and mammal herds (Hemelrijk and Hildenbrandt,2012).
Onthebasisofthesebiologicalstudies,aggregationisalsoa mat-terofinterestinvariousswarmroboticsstudies.Itisconsidered asafundamentaltaskthatallowsrobotswarmstoperform com-plextasks,suchascollectivemovement,self-assembly,andpattern formation,ortoexchangeinformation.
∗ Correspondingauthor.
E-mailaddress:[email protected](F.Harrou).
This study takes inspiration from the topological distance approachrevealedinstudiesofbirdsflockingandfishschooling. Ballerinietal.(2008a,b)showedempiricallythattheunpredictable, amazinglycomplexpatternsformedbybirdsemergefroma topo-logicaldistanceapproachratherthanametricdistanceapproach, meaningthatthebirdsonlyinteractwiththeirnearestsixorseven neighboursratherthanalloftheneighboursintheirfieldofvision. Computersimulationspredictthatasignificantlyhigher cohe-sionoftheaggregationisachievedusingatopologicalinteraction ratherthanthestandard metricone.Similarly,empiricalresults showthatfishandelephants,forexample,interactwithonlythree orfourneighbours(Niizatoetal.,2014).
Inswarmrobotics,fewmodelshaveappliedsuch topological approachestothestudyofcollectivebehaviours.Someresearchers proposedselectingstrategiesbeforeinteractingwithnearbyrobots so that only a fixed number of neighbours are used (Lee and Chong, 2008; Ercan et al., 2010). For example, Lee and Chong (2008)proposedabio-inspiredflockingcontrolbasedonselecting twoneighborsforteammaintenanceandlocalinteractions.Ercan etal.(2010)introducedaregulartetrahedronformationstrategy for selectingthe three neighbours that forms thebest tetrahe-drontoensureformation.Inourpreviouswork(KhaldiandCherif, 2016a),westudiedself-organizedpatternsthatemergefroman approachbasedontheintra-virtualphysicalconnectivityamong https://doi.org/10.1016/j.biosystems.2018.01.005
thedensityoftherobotscouldplaytheprimaryrolewhilethe inter-robotdistancewouldplayonlyasecondaryroleasametricuseful forproximity controlorcollisionavoidance.WiththeDW-KNN topology,virtualphysicalconnectionsaredynamicallycreatedand destroyedamongtheweightedKNNratherthantheunweighted KNN.To achievethis topology,we introducea Smoothed Parti-cle Hydrodynamic(SPH)density-based approach(Section4.2.1) toevaluatethedensityoftherobotsintheswarmandtoweight thedistancesamongneighbours.SPHisamesh-freeLagrangian methodthatiswidelyusedformanydiverseapplications,including astrophysics,geophysics,engineering,andthefilmandcomputer gamesindustries.Themethodisbasedonaninterpolation tech-niquethatapproximatesphysicalquantitiesthataremovingwith particles(VioleauandRogers,2016);hereweapproximatethe den-sityasa physicalquantitymovingwiththerobots.AsinKhaldi andCherif(2016a,b),weuseavirtualviscoelastic-basedproximity model(Section4.1)astheintra-virtualphysicsconnectivityamong theneighbouringrobots;thevirtualviscoelasticconnectionsare Voigt links, andeach linkcan berepresentedby apurely elas-ticspringandapurelyviscousdamperconnectedinparallel.We alsoincorporatearepulsiveprimitivetoavoidobstaclesand colli-sionswiththerobotsthatarenotvirtuallylinkedtogether(Section 4.4).Theoverallcontrolmodel(Section5)withaswarmof foot-botrobotsisdesignedandevaluatedusingtheARGoSsimulator (Pincirolietal.,2012).Theresultsobtainedin(Section6)by sim-ulatingupto150foot-botrobotsinbothabsenceandpresenceof obstaclesshowthevariationthatemergedintheself-organized aggregationfromtheexecutionoftheoverallcontrolmodel.The performanceofthemodelisstudiedusingthreedifferentmetrics (Section7.1):thedistance-weighteddistributionquality(Fw),the
aggregationquality(Fag),andtheAveragedMeanDistanceError
(AMDE)metric. Withthesemetrics,weanalyzetheaggregation performanceinnormalcircumstances(Section7.2),andwelater assesshowtheaggregationperformanceisaffectedwhenthe read-ingsoftherobots’rangeandbearingsensorsarecorruptedbynoise (Section7.3).Furthermore,inSection8,weprovidecomparisonsof theproposedapproachwiththeconventionalKNNapproachand showedthatweachievebetterresults.
2. Relatedworks
Aggregationisacurrentfocusofswarmrobotics,andseveral studiesonbothcue-basedaggregationandself-organized aggre-gationhavebeencompletedinthelasttwodecades.
2.1. Worksoncue-basedaggregation
In one study of cue-based aggregation by Kube and Zhang (1993),alightsourcewasusedtoaggregatearobotsystemaround anobjectandtotransporttheobjectinacollaborativemannerto anothergoal;byfollowingsimplebehaviours(e.g.,tofindlightand followlight),theaggregationtaskwascompletedwithnoexplicit
bees,whichprefergatheringwherethetemperatureis36◦C.The
BEECLUSTmodelproposedbyKernbachetal.(2009)wasthefirst algorithm that mimickedthis behaviour;a gradual light source wasusedtogenerateclusteringbehaviorinaswarmrobotics sys-tem.Itwasproventoactrobustlyinmanyresearches(Bodietal., 2012,2015;Arvinetal.,2014a,2016).Further,differentvariations of themodelhave beensuggestedtoincrease theperformance oftheaggregationprocess.Forinstance,Arvinetal.(2011) pro-posedanewaggregationalgorithminwhichadynamicvelocity andacomparativewaiting timewereintroducedtotheoriginal BEECLUSTmodel,whichcontributedtoasignificantimprovement intheaggregationtime.Furthermore,acomparisonbetweenthe originalBEECLUSTalgorithmandtwomodifiedversions–calledthe vectoraveragingalgorithmandthenaivealgorithm–showedthat boththevectoraveragingandnaïvealgorithmsoutperformedthe originalBEECLUSTmodel,andrevealedthatnoisehaslessimpact inthevectoraveragingmethodthanthenaïveone(Arvinetal., 2014a).
Later, those authors introduced a fuzzy-based aggregation approach to enhance the performance of BEECLUST in both computer-basedsimulationsandrealrobotswarms(Arvinetal., 2014b).Wahbyetal.(2016),proposedanotheradaptive variant ofBEECLUST,wheretheoriginalalgorithmwasextendedtoadapt automaticallytoanylightconditions.Recently,Bodietal.(2012) proposedamodelcalledODOCLUST,whichincorporated odome-tryasanadditionalcapabilitytoBEECLUST.TheODOCLUSTvariant achievedafastandaccurateaggregationwithoutrequiring high-fidelityodometry.
2.2. Self-organizedaggregationworks
In thispaper,we arespecificallyinterested instudying self-organizedaggregation,inwhichrobotswarmsachieveaggregation usingsimplelocalinteractionrulesamongindividuals.Different approacheshave beenproposedtoaddresstheproblemof self-organized aggregationin swarm robotics. Garnier et al. (2008) adoptedaprobabilisticapproach,inspiredbythecockroachmodel ofJeansonetal.(2005),toachieveaggregationusingaswarmof 20physicalAlicerobotsinhomogeneousenvironments.A simi-larworkbyCorrellandMartinoli(2011)showedthatwhenusing probabilisticaggregationrules,aminimumcombinationof com-municationrangeandlocomotionspeedwasneededtoachievea singleaggregatecluster.SoysalandSahin(2005)suggesteda prob-abilisticaggregationmethodinwhichastate-finitemachinewas usedtocombineasetofsimplebehavioursthatincludedavoiding anobstacle,approaching,repelling,andwaiting.
Inotherstudies,self-organizedaggregationwasstudiedusing deterministicapproaches.Inthesemethods,therobotsbuilda con-nectedvisibilitygraph,andensurethatthegraphispermanently maintained.Andoetal.(1999)usedanalgorithminthissenseto studyaggregationinagroupofmobilerobotswithalimitedsensing range.Later,thealgorithmwasgeneralizedbyAndoetal.(1999)to achieveanaggregationinarbitrarilyhighdimensions.The
forma-Fig.1. Thefoot-botrobot,CADmodel(Pinietal.,2009).
tionofthegraphinthesealgorithmswasbasedontheassumption thattherobotswereabletomeasureboththerangeandtheangle oftheirneighbours.However,Gordonetal.(2004)wereableto achievesuchanaggregationusingonlytheanglemeasurementof therobot’sneighbours.Theaggregationperformanceofthislast algorithmwaslaterimproved,byintroducinganadditional,crude range-sensingcapabilityfordifferentiatingwhetherneighbouring robotswerenearorfarinGordonetal.(2008).Inanotherstudy,De GennaroandJadbabaie(2006)usedtheLaplacianmatrixtoallow eachrobottobuilditsownproximitygraph.TheLaplacianmatrixis analgebraicrepresentationofagraph,throughwhichmanyuseful graphpropertiescanbefound(Merris,1994).Therelatedcontrol wasfullydecentralized,andsimulatedresultsdemonstratedthat themodelwaseffectiveandevenincreasedtheconnectivityofthe entireswarm.
Insomeworks,self-organizedaggregationmodelshavebeen approached using artificial evolution techniques. For instance, aggregation with simple robots, called s-bots, was studied by Triannietal.(2003).Inthisstudy,generalsolutionstothe aggre-gation problem were produced using an evolutionary robotics mechanism.Themethodwasabletoproduceclusteringbehaviours withboth staticand dynamic behavioural strategies.With that model,Dorigoetal.(2004)revealedthat effectiveevolved con-trollerscouldbeachievedforboth aggregatingandcoordinated motionbehavioursinaswarmofs-bots.Inasimilarsetup,Soysal etal.(2007)investigatedtheeffectsofanumberofparameters, suchastherobots’number,thesizeofarena,andtheruntime. Inanotherstudy,Gaucietal.(2014a)proposedtwoalgorithms– areactivecontrollerwithnomemoryandarecurrentcontroller withmemory–tostudyaggregationinaswarmofe-puckrobots. Thealgorithmswerebasedonaclassicalevolutionary program-mingtechnique,andusedasimplebinarysensorwithasensing rangethatprovedsufficienttoachieveanerror-freeaggregation. Resultsfromboththesimulation andexperimentsshowedthat aggregationtowardoneclusterwassuccessfullyachieved. How-ever,asufficientlylongrangeinthebinarysensorwasneededto achieveanaccurateaggregation.
Otheraggregationstudiesapproachedavisionbasedonvirtual physics methods. Gasparri et al. (2012a) adopted an attrac-tive/repulsivevirtualforcemodeltostudyaggregationinaswarm ofmulti-robotsystemsbasedonlocalinteraction.Thismodelwas laterextendedtocopewithactuatorsaturationbyGasparrietal. (2012b)andtointegrateobstacleavoidancebyLecceseetal.(2013).
Inmostoftheworkscitedabove,theinter-robotdistanceistheonly factortakenintoaccountwheninterconnectingtherobots. How-ever,incertainapplicationswheresupplementaryfactorssuchas thedensityoftherobotscouldemergeasimportant,arobot’s den-sityplaysamorecrucialrolethantheinter-robotdistance.Inthis context,therelatedmethodologiesmainlyusetheSPHmodelto simulatefluid-likebehaviourinarobotswarm.Thistechniquehas successfullybeenusedtodemonstratehowmulti-roboticagents, modelledasastreamofincompressibleorcompressiblefluidare capableofbeingappliedtotaskssuchasgroupmotionandshape control,groupsegregation(Zhaoetal.,2011),patterngeneration (Pimentaetal.,2008,2013),andunknownareacoverage.
RatherthanusingtheSPHmodelasavirtualfluidforcelawto designtheproximitycontrolofarobotswarm,hereweusethe SPHmodel toevaluatethedensity oftherobotsin theswarm, thenwedefineaDW-KNNneighbouringtopologytoaggregatethe robotsbasedonthisdensity.UsingtheDW-KNN-based neighbour-ingtopology,self-organizedaggregationswereachievedbytaking intoaccounttwokeyfactors,theinter-robotdistanceandtherobot’ density.
3. Method
3.1. Problemformulation
We consideranareasurroundedbyfourwalls,containing a swarmofN(R1,...,RN)differentialtwo-wheeledmobilerobots
thatareinitiallydistributedinrandompositionsandheading arbi-trarydirections.Weassumethat,withinaspecificrangeDr,each
robotRiissufficientlyequippedwithsensorstomeasuretherange
dijandthebearing!ijofitsjthneighbour(j ∈Ni(t),whereNi(t)is
thesetofneighboursoftherobotRiatatimet).Inaddition,we
con-siderthattherobotcancommunicatewithitsneighbourswithin thesamerange.
Theobjectiveistostudytheself-organizedaggregationsthat emergethrougha topologicalneighbourhoodapproachwithout usinganycues.
3.2. Simulationplatform
Thesimulationsinthis studywereperformedontheARGoS platform(Pincirolietal.,2012).ARGoSisanopensource multi-robot simulatorthat wasfirst developed withinthe EU-funded Swarmanoidproject1tostudytoolsandcontrolstrategiesfor
het-erogeneous swarmsof robots. Now,it is one of themost-used simulation platforms in many researches and projects that are dedicatedtosynthesisswarmingbehaviourcontrols.ARGoScan simulatelarge-scale,heterogenousswarmsofrobotsinrealtime. Moreover,itcomeswithallthetoolsneededforthedevelopment cycleofrobotcontrolcode,fromdesigntovalidationonrealrobots; therefore,thereisnodifferencebetweencodingforsimulationor reality(Pincirolietal.,2012).ARGoShasabuilt-inmodelsfor sev-eralwell-knownrobotsuchasthefoot-bot,e-puck,kilobot,and fly-bots.
Therobotsusedinourexperimentalsimulationsarefoot-bots (seeFig.1),two-wheeleddifferentialmobilerobotsdevelopedby Bonani etal. (2010) that come withthe actuators and sensors requiredby ourcontrolmodel.In ourexperiments,we usethe following.
• A range and bearing perception and communication device (calledRAB),thatallowstherobotcommunicatingwithits
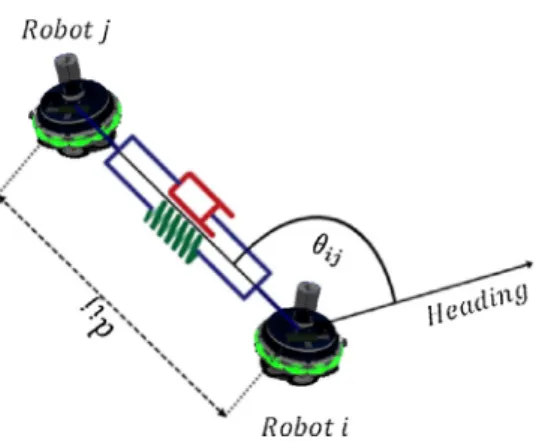
Fig.2. Avirtualviscoelasticinteractionmodelbetweentworobotsmodeledasa
Voigtconnection.
bours, as wellas identifying their relative range and bearing measures.
• Proximitysensorsthatallowdetectingobjectsaroundtherobot. Thefoot-botrobotisequippedby24sensors,whichareuniformly distributedinaringaroundtherobotbody.
• Two wheels actuators to independently control the forward speedoftheleftandtherightwheelsoftherobot.
Thebodyofthefoot-botisabout8.5cmwideand14.7cmtall. Theinter-wheeldistanceis0.14cm.Thevelocitiesoftheleftand rightwheelsalongthegroundcanbesetindependentlytoa maxi-mumspeedof[13,13]cm/s.
4. Robotmodel
Inthisstudy,therobotmodelwasbuiltfollowinganartificial physicsdesignapproach(Spearsetal.,2004).Inthismethod,the robotssenseandrespondtovirtualforcesthataredrivenbyregular physicslaws.Here,therobotwasbasedonourpreviouslyproposed model(Khaldietal.,2017;KhaldiandCherif,2016a,b),wherethe robotissubjectedtothevirtualforcevector
ˆai= ˆpi+ ˆri. (1)
Theproximitycontrolvector, ˆpi,isusedtoencodethe
attract-ingrules.Therepulsivecontrolvector, ˆri,isusedtoencode the
repulsingrules. 4.1. Proximitymodel
Theproximitycontrolisthecrucialmodelinourstudy;itwas usedtoaggregatetherobotstogetherwhilemaintainingacertain distancebetweenthem.Toachievethismodel,atopological neigh-bourhoodstrategyisappliedfirstbyeachrobotRitodecidewhich neighbours amongthoseavailableare takenintoaccountwhen arrangingtherobots.Then,ameshofvirtualviscoelasticlinksis builtbetweentherobotsofthetopologicalneighbourhoodby mod-ellingthesensingcapabilitiesusingVoigtinteractions(seeFig.2) (KhaldiandCherif,2016a,b).TheproximitymodelofeachrobotRi
iscomputedas ˆpi=
!
j∈ Ti(t) (ks ij(dij−d0)ˆdij+kdij(v
i−v
j)), with ks ij= ks"
d ij , kd ij=kd#
ks ij, and i=/j, (2)whereTi(t) ∈Ni(t)isthesetoftopologicalneighboursattimet
(moredetailsabouthowtherobotidentifiesthissetisdiscussed in the next subsection),and ks
ij and kdij are the spring and the
dampingcoefficients,respectively.Thevaluesofthesecoefficients
Fig.3. AschematicrepresentationofSPHparticleinteractionswithintheinfluence
domaingovernedbythekernelfunction.
aredynamicallychangingwithregardstotheactualdistancedij
betweenarobotRiandarobotRj,andthetwogainconstants,ks
andkd.Theequilibriumlengthofthespringisd0,and ˆdijistheunit
vectorindicatingthedirectionoftheforceofthevirtualspring. Finally,
v
iandv
jaretheforwardvelocitiesoftherobotsRiandRj,respectively.
4.2. Topologicalneighborhoodapproach
WeproposetheDW-KNNmethodasatopologicalapproachto identifyTi.Theweighteddistancesarecomputedasfollows:
• First,arobotRicomputesitsdensity"ibasedonanSPHdensity
estimationtechnique,whichshouldbeimmediately communi-catedtoitsneighbours.
• Second, upon receiving the densities ("j) fromneighbours, a
weighted-distancefunctionwijisappliedtoweightthedistances
totheneighbours.
• Finally,basedonwij,thesetTiisidentifiedbysortingthe
neigh-boursinorderofthenearestK-weighteddistances,whereKrefers tohowmanyneighboursaretakenintoaccount.
The SPH density estimation technique and the weighted-distance-basedfunctionweuseinourstudyarediscussedinthe followingsubsections.
4.2.1. SPHdensityestimationtechnique
SPHisamesh-freeLagrangianmethod,inwhichthestateofthe simulatedsystemisrepresentedbyemployingafinitesetof dis-orderdiscreteparticlesinawaythatmakesbothafixedorderto organizetheparticlesandageneratedmeshtorepresentthe con-nectivityoftheparticlesunnecessary(VioleauandRogers,2016). SPHhasbeenfirstlyintroducedincomputationalastrophysics stud-iesandisappliedinsimulatingcompressibleflowproblems(Price, 2012).OneofthemainfeaturesoftheSPHtechniqueisthatatany givenpointinthesimulationdomain#,apropertyofaparticleican beapproximatedrelyingonasummationofaninterpolationkernel functionWwithhasthesmoothinglength(Pimentaetal.,2013).A schematicrepresentationofthissystemispresentedbelowinFig.3 IntheSPHapproach,interpolationisusedtoapproximate phys-icalquantitiesthataremovingwithparticles;hereweapproximate thedensity asa physicalquantitymoving withtherobots. The robotdensity"iisevaluatedastheweightedsumofdistancesover
itsproximaterobotswithinaparticularrangeDr=2h(Zhaoetal., 2011): "i=
!
j∈Ni W(dij,h), (3)TheweightfunctionsusedinthisworkaretheM4cubicspline functionstruncatedat2h(Price,2012):
W(dij,h)=$
⎧
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎩
1 4(2−q) 3 −(1−q)3, 0≤q<1 1 4(2−q) 3, 1 ≤q<2 0, q≥2 (4)whereq=dij/hand$=10/(7%h2)isanormalizedconstant.The
computeddensityiscommunicatedtotheneighboursoftherobots. 4.2.2. Distance-WeightedK-NearestNeighbours
DW-KNNisaverypopularacronyminmachinelearning.Itis aclassificationmethodthatisspecificallyusedtoassignalabelto anewquerybasedonweightingcloserneighboursmoreheavily, accordingtotheirdistancesfromthequery(Gouetal.,2012). Tak-inginspirationfromthistechnique,anduponreceivingtheSPH densitiesfromtheneighbours,arobotRiweightsthedistancesto
itsneighboursas
wij="jdij, (5)
where"jdenotesthedensityreceivedfromthejthneighbour.
Further,therobotbuildsaDW-KNNconnectivity,Ti(t),bysorting
theneighboursinorderofthenearestK-weighteddistances,where K∈{1,2,...,N−1}referstohowmanyneighboursaretakeninto account.Thecardinalityoftheneighbourhood,|Ti(t)|isK,andj∈
Ti(t):wij≤wim,
∀
m∈Ti(t).InthecasewhereK=N−1,themeshistheall-to-allconnectednetwork.
ByusingthefunctioninEq.(5)whereboththedistanceand thedensityareappliedasequalkeyfactors,aneighbourrobotRj
locatedfarawayfromtherobotRiwithaheavydensitycouldhave agreaterimpactthanonelocatednearRibutwithaweakdensity. 4.3. Obstacle/collisionavoidancemodel
Thismodel wasusedspecificallytoavoid obstacles encoun-teredin thearena.Sincetherobotswereplaced inaninbound environmentsurroundedbyfourwalls,wedenotethesetofthe fourwallsandobstaclespresentinthearenabyOi.Inaddition,
sincetherobotsonlyinteractedwiththeirDW-KNN robots(Ti),
themodelwasalsoactivatedtoavoidcollisionswiththeremaining neighbouringrobots(Mi=Ni\Ti).Toachievethismodel,a
repul-sivepotentialfieldwasgeneratedaroundeachrobot.Thefieldhad astronginfluencewhenarobotwasclosetothepotentialfieldand adecreasingeffectastherobotmovedfurtheraway.Wecompute therepulsivecontrolvectorasfollows(KhaldiandCherif,2016a,b): ˆri=
⎧
⎨
⎩
kr(L1 j− 1 L0)( 1 L2j), Lj≤L0 0, elsewhere (6) wherekrisascalingconstant,Lj(j∈Ai=Oi∪Mi)isthedis-tancetothenearestobstacleorthenearestrobot,andL0 isthe
obstacleinfluencethreshold. 4.4. MotionControl
Ateachcontrolstep,eachrobotRitransformsthetotalvector, ˆai,intosignalsthatupdatetheforwardspeeds(
v
li andv
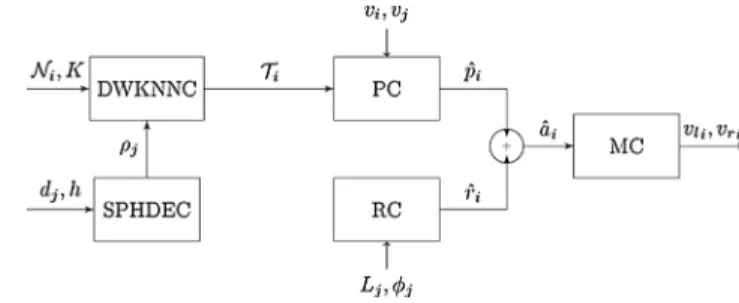
ri)ofitsFig.4. Theoverallself-organizedaggregationcontrolmodel.
leftandrightwheels,respectively,asfollows(KhaldiandCherif, 2016a,b):
(
v
liv
ri)
=⎡
⎢
⎣
1 b 2 1 −b 2⎤
⎥
⎦
(
v
i ωi)
, (7) ωi=kω0
180 ∠ˆai %1
,v
i="
v
max |ωi|+1 , (8)where
v
iandωi,respectively,aretheforwardandtheangularspeedsoftherobot,bistherobot’sinter-wheeldistance,∠ˆaiisthe
angleformedbythexandycomponentsofthevector ˆai,kωisa
gainconstant,and
v
maxisthemaximumforwardspeedthattherobotcanreach.Theangularspeedshouldbealsowithintherange [−ωmax,ωmax].
5. Implementationoftheoverallself-organized aggregationcontrolmodel
Aschemeoftheoverallcontrolmodelimplementedinthe foot-botrobotisshowninFig.4.Thedetailsoftheentirealgorithmare illustratedinA.
Toachieve theSPHDensityEstimatorControl(SPHDEC),the robotusestheRABdevicetomeasurethedistances,dj,toits
neigh-bourswithintheperceptionrange,Dr.Usingtheequationsfromthe
SPHDECmodel,thefoot-botisabletocomputeitsdensity,whichis immediatelysenttoitsneighboursviatheRAB.Sincethefoot-bot canexchangeonly10bytesofdata,thedensityisscaleddownby 103beforebeingsenttotheneighbours.
ToachievetheDW-KNNControl(DWKNNC),therobotreceives thedensities oftheneighboursand computesitscorresponding weighteddistances;then,basedonthevalueofK,therobotcan determinetheDW-KNN.
Torecognizetheproximitycontrol(PC),therobotusesonce moretheRABdevicetocommunicateitsforwardspeedtoits neigh-bouringrobots,aswellastomeasuretherangeandbearing(dj
and!j)towardstheseneighbouringrobots.Foraccomplishingthe
RepulsiveControl(RC),weuseproximitysensorstomeasurethe distance(Lj)and the angle(ϕj)ofthe closet detectedobstacle.
Finally,basedontheresultingvectorai,theMotionControl(MC)
actuatesthelinearspeedoftherobotwheels. 6. Simulationresults
Asmentionedabove,allofthesimulationsinthisstudywere performedusingARGoSplatform(Pincirolietal.,2012).Inthe fol-lowingsubsections,weillustratetheconfigurationsetupusedin thesimulationandsomeofthesimulationresults,explainthe met-ricsusedtoevaluatetheproposedmethod,andpresentsomeofthe resultsinthecontextofthemetrics.
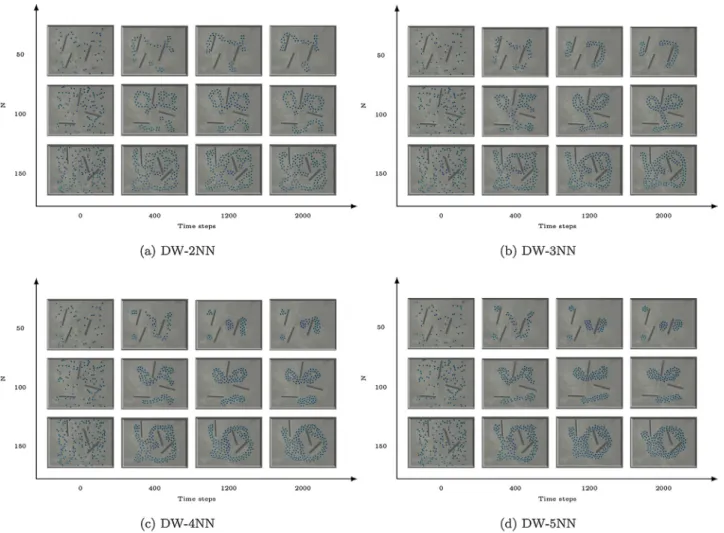
Fig.5.Self-organizedaggregationofaswarmofNfoot-botsrunningtheDW-KNNtopology.
Table1
Parametersandconstantsusedinthesimulation.
Parameter Description Value
b Inter-wheelsdistance 0.14m
vmax Maximumforwardspeed 0.10m/s
ωmax Maximumangularspeed 180◦s−1
d0 Equilibriumlengthofthespring 0.3m
L0 Obstacleinfluencethreshold 0.1m
kr Obstaclescalingconstant 1.75forceunit
kd Dampergainconstant 1.25forceunit
kω Angularspeedgain 1.5◦s−1
ks Springgainconstant 1.9forceunit
Dr Maximumperceptionrange 1.5m
h Thesmoothinglength 0.5m
6.1. Experimentalsetup
WeuseaswarmofNfoot-botsheadedinarbitrarydirections thatwerearbitrarilyplacedina(10×6)m2arena.Noisewasadded totherangeandbearingmeasurementsoftheRABdevice.Noise wasmodelledasaGaussiandistributionwithzeromeanand0.01 deviation. The loss of packets during communication wasalso takenintoconsiderationbysettingthelossprobabilityto3%.We conductedthreeseparateexperimentswithdifferentnumbersof foot-botrobots(N={50,100,150})foradurationof2000timesteps (ts)each(1ts=0.1s).Startingfromtheinitialdistributionofrobots, asetofconstantsandparameters(seeTable1)wereinitiatedin eachexperiment.
WedemonstrateinFig.5theself-organizedaggregationsthat developed from the execution of theoverall control model by
a swarm of N={50, 100, 150} foot-bots robot at diverse time steps(t=400,t=1200,andt=2000)whenstartingfromtheinitial positions(t=0).Startingfromthesameinitialposition,therobot swarmachieveddifferentself-organizedaggregationsasonlythe neighbourhoodtopologywasvaried.Fig.5ahighlightstheresults obtainedfromaDW-2NN topology,Fig.5bpresentstheresults achieved froma DW-3NN topology, whereas resultswith DW-4NNandDW-5NNtopologiesarementionedinFig.5candFig.5d, respectively.
Also, we investigated theDW-KNN approach in presence of obstacleswhilekeepingthesameparameterssetupofthe previ-ousscenario.Todoso,threeobstaclesarerandomlyplacedinthe arena.Fig.6showstheevolutionoftheswarmtoachieveaccurate aggregationswhilesmoothlyavoidingobstacles.
Itcanbeseenthatinbothabsenceandpresenceofobstacles, therobotsswarmisabletoachieveself-organizedaggregationsvia theproposedapproach.Moreover,theapproachcanbeusefulin scenariossuchasdrivingalargescaleofrobotsfromoneareato another,whilemaintainingaconnectednessbetweentherobots andavoidingcollisions.Here,theconnectivitybetweenthe neigh-bours aremodelledusing virtualviscoelasticlinks betweenthe DW-KNN,andthedistancestowardthoseneighboursareweighted usinganSPHdensityestimationtechnicwhereM4cubicspline functionsareapplied.Thisfactcouldsmoothlydrive theswarm toemergecubicbasedself-organizedaggregationsasillustratedin snapshotsofFigs.5and6.
Itcanalsobenoticedthatinpresenceofobstacles,more clus-terscouldemergecompared toasituationwithoutobstaclesin thearena.See,forexample,snapshotsinFig.6a,c,anddforthe
Fig.6.Self-organizedaggregationofaswarmofNfoot-botsrunningtheDW-KNNtopologywithexistingobstacles.
casewhenN={50,100},andsnapshotsinFig.6bforthecaseof N=50. Thisismainlyduetothefactthattherobot’field vision willbemuchinfluencedbytheexistenceofmoreobstacles,and thereforeitsrangeandbearingsensingcapabilitiescanbe signifi-cantlyaffected.Thismeansthatanobstaclelocatedinarobot’RAB rangewillblindthevisionofarobottosenseandcommunicate withneighbours.Asconsequenceofanincreaseofboththesizeof robotsintheswarmandthevalueofKintheDW-KNNapproach resultsinadecreaseofthetotalnumberoftheclustersthatcould emerge.
7. Performanceanalysis
Inthissectionweareinterestedinstudyingtheperformance ofourproposedmodel.Specifically,weevaluatehowtherobots, relyingonlyontheDW-KNNtopology,achievedaself-organized aggregationwhilemaintaininga certaindistance betweeneach robot.Wealsoanalyzetheeffectofnoiseonthemodel.Forthat, weusethefollowingmetricstoascertaintheattainmentofthis objective.
7.1. Performancemetrics
7.1.1. Distance-weighteddistributionquality
Wedefineanewmetrictomeasurethequalityoftheevolution oftheoverallweighteddistancesoftheentireswarm.First,the
weighteddistancesaveragedoverthedifferentrobotsand neigh-boursAWD(t)arecalculatedasfollows:
AWD(t)=N.K1 N
!
i=1⎛
⎝
K!
j=1 wij(t)⎞
⎠
. (9)Thenthedistance-weightedqualitymetric,Fw(t),isgottenby
thefollowingequation:
Fw(t)=1−
"
1AWD(t)+1. (10)
7.1.2. Aggregationquality
Theaggregationquality(Dorigoetal.,2004),Fag(t),isrelated
totheaveragedistanceoftherobotsfromtheircenterofmass.To measurethismetric,firstthedistanceci(t)ofeachrobotRifromthe
centerofmassofthegroupatsimulationcycletiscomputedas
ci(t)=
6
6
6
6
6
6
Xi(t)−N1 N!
j=1 Xj(t)6
6
6
6
6
6
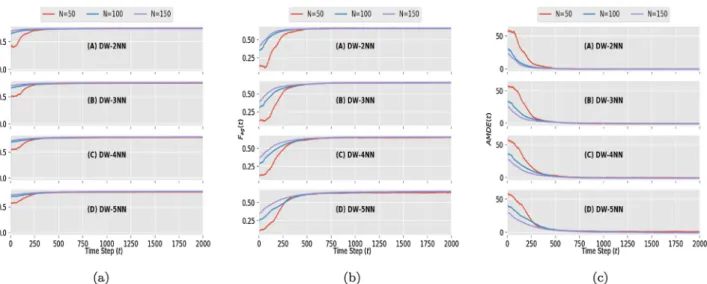
, (11)Fig.7.Performancemetricsresultsinabsenceofobstacles:(a)Fw(t),(b)Fag(t)and(c)AMDE(t)obtainedfromtheoverallcontrollerimplementedonN={50,100,150}robots
whentakingintoconsiderationdifferentDW-KNNtopologies.Inallplots,thex-axisrepresentstheevolutionoftimestept.Eachcurverepresentsthemedianvaluesobtained
from25runswithdifferentinitialconfigurationsofrobots.
Fig.8. Performancemetricsresultsinpresenceofobstacles:(a)Fw(t),(b)Fag(t)and(c)AMDE(t)obtainedfromtheoverallcontrollerimplementedonN={50,100,150}
robotswhentakingintoconsiderationdifferentDW-KNNtopologies.Inallplots,thex-axisrepresentstheevolutionoftimestept.Eachcurverepresentsthemedianvalues
obtainedfrom25runswithdifferentinitialconfigurationsofrobots.
whereXi(t)isthepositionvectoroftheithrobotattimestept.
ThisvalueisusedtocomputetheaggregationqualityAgi(t)ofthe
ithrobotasfollows:
Agi(t)=
⎧
⎪
⎪
⎨
⎪
⎪
⎩
0, ci(t)< ˜r(n) R(n)−ci(t) R(n)− ˜r(n), ˜r(n)≤ci(t)≤R(n) 1, ci(t)>R(n) (12) where R(n)= ˜r(n)+100, ˜r(n)=rs.(√n−1) is defined as anapproximationoftheradiusofthesmallestcirclethathasnrobots positionedonitsperimeter,andrsistheradiusofarobot(Dorigo
etal.,2004).
Thentheaverageaggregationquality,Fag(t),isdefinedas
fol-lows: Fag(t)=N.K1 N
!
i=1⎛
⎝
K!
j=1 Agi(t)⎞
⎠
. (13)7.1.3. AveragedMeanDistanceError
TheAveragedMeanDistanceErrormetric,AMDE(t),isdefinedas theinter-robotsdistanceerroraveragedoverthedifferentrobots andneighbours.Itisusedmainlytomeasurehowwelltheswarm maintainsacertaindesireddistancebetweentheindividualrobots astheymovetogether.Themetriciscalculatedasfollows:
AMDE(t)=N.K1 N
!
i=1⎛
⎝
K!
j=1 (dij(t)−d0)⎞
⎠
. (14)7.2. Analysisinnormalcircumstances
Toevaluateourproposedapproachmoreaccurately,we per-formed25runsofeachexperimentandtheexperimentduration of each run was setagain to 2000time steps.We plotted the resultsobtainedfromthesimulationofN={50,100,150}foot-bot robotswithintheDW-2NN,DW-3NN,DW-4NNandtheDW-5NN topologiesinabsenceandpresenceofobstacles.Figs.7and8show respectively thetimeevolution ofFw(t),Fag(t), andAMDE(t)for
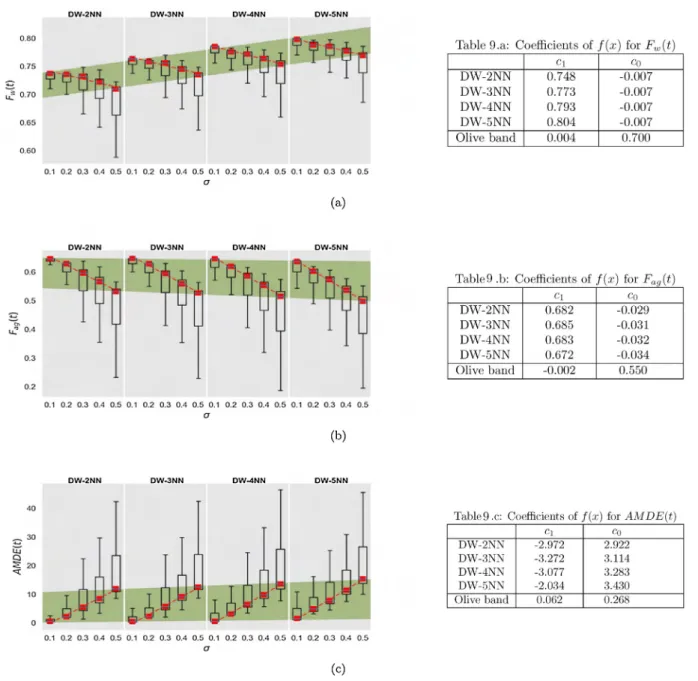
Fig.9.Performancemetricsresults:(a)Fw(t),(b)Fag(t)and(c)AMDE(t)obtainedfromtheoverallcontrollerimplementedon100robotswhentakingintoconsideration
differentDW-KNNtopologieswithdifferent$.Inallplots,thex-axisrepresentsthestandarddeviationofnoise$.Eachboxrepresentsvaluesobtainedfrom25runswith
differentinitialconfigurationsofrobots.Theredsquaresshowthemedianvalues,andthedashedredlinesshowsalinearleastsquaresregressionfittothesesquares;the
olivebandshowsalinearleastsquaresregressionfittothemeanofthe5redsquaresforeachtopology.Thelinearleastsquaresregressionfunctionsgeneratedtofitallof
thesepointsareoftheformf(x)=c1x+c0;thecorrespondingcoefficientscanbefoundinthetablestotherightofeachfigure.(Forinterpretationofthereferencestocolor
inthisfigurelegend,thereaderisreferredtothewebversionofthisarticle.)
thefourDW-KNNcase studiesin bothabsenceandpresenceof obstacles.Inalloftheplots,thecurvesshowthemedianvalues ofthe25runs.Resultsshowthattheswarmrobotsystem suc-cessfullyconvergedintoastablevalueofFw(t),Fag(t)andAMDE(t)
forallNrobotsandforalltopologies. Thismeansthatthefinal self-organizedaggregationsareachievedwherealltherobotshad nearlythesamedensitywiththedesiredinter-robotdistance.We alsonotethattheperformanceoftheproposedstrategyimproved whenthesizeoftheswarmincrease.However,theoveralltime convergenceofthemetricsinabsenceofobstaclesismuchbetter whencomparedtotheobstaclecasestudies.
7.3. Theeffectofsensorynoise
Inthissection,weinvestigatehowtheaggregationperformance wasaffectedwhenthereadingsoftherobotsrangeandbearing
sen-sorswerecorruptedbynoise.Wemodellednoiseasinthenormal experimentalsimulation,i.e.,asaGaussiandistributionwithzero meanandastandarddeviation$={0.1,0.2,0.3,0.4,0.5},butthis timeweconsidereddifferentvaluesof$.Theotherexperimental settings(giveninTable1)remainedfixed.Wesetanexperiment foreachvalueof$andperformed25runsofeachexperiment.Inall ofthesimulations,wefixedN=100robots,andweusedthe follow-ingDW-KNNtopologiesineachrun:DW-2NN,DW-3NN,DW-4NN, andDW-5NN.
Fig.9plotsFw(t)(Fig.9a),Fag(t)(Fig.9b),andAMDE(t)(Fig.9c)
withrespecttothedifferentvaluesof$.Inalloftheplots,eachbox representsthemetricvaluesobtainedfrom25simulationswith dif-ferentinitialconfigurationsof100robots.Theredsquaresshowthe meanvalues,andthedashedredlineshowsaleastsquares regres-sionfittothefivepointsofeachtopology.Theolive-colouredband
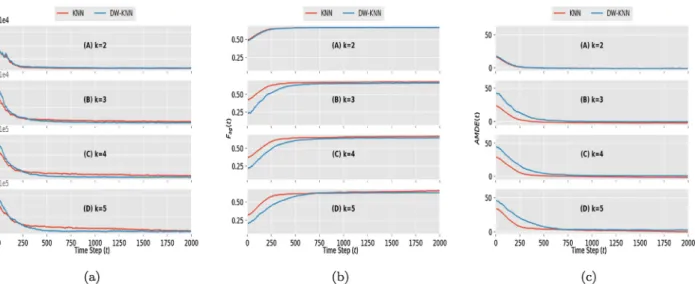
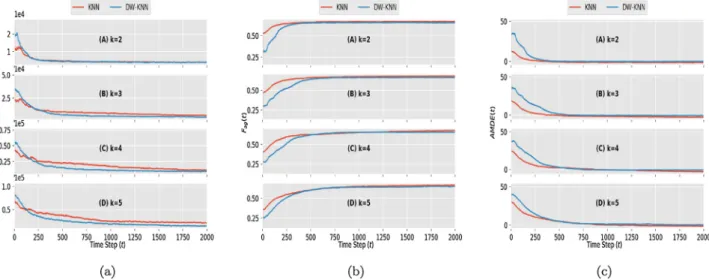
Fig.10.PerformancemetricsresultsfortheKNNandtheDW-KNNtopologicalaggregationapproacheswiththeMeanShiftnoisemodel(caseb=3):(a)Fdisp(t),(b)Fag(t)and
(c)AMDE(t)obtainedfromtheoverallcontrollerimplementedonN=100foot-botrobotswhentakingintoconsiderationdifferentKNNandDW-KNNtopologies.Inallplots,
thex-axisrepresentstheevolutionoftimestept.Eachcurverepresentsthemedianvaluesobtainedfrom5runswithdifferentinitialconfigurationsofrobots.
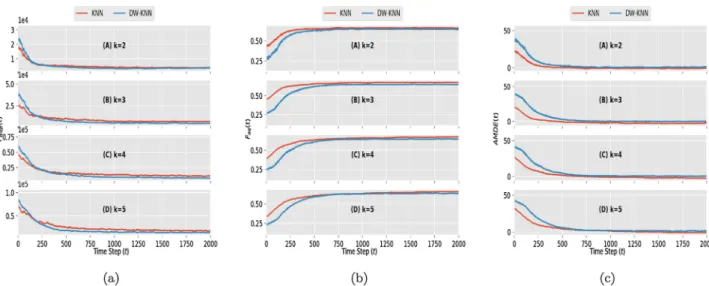
Fig.11.PerformancemetricsresultsfortheKNNandtheDW-KNNtopologicalaggregationapproacheswiththeMeanShiftnoisemodel(caseb=6):(a)Fdisp(t),(b)Fag(t)and
(c)AMDE(t)obtainedfromtheoverallcontrollerimplementedonN=100foot-botrobotswhentakingintoconsiderationdifferentKNNandDW-KNNtopologies.Inallplots,
thex-axisrepresentstheevolutionoftimestept.Eachcurverepresentsthemedianvaluesobtainedfrom5runswithdifferentinitialconfigurationsofrobots.
indicatestheevolutionofthemetricwithregardstotheDW-KNN topology;itrepresentsanotherlinearleastsquaresregressionfitto thepointsofthemeanvaluesofeachfiveredsquares.Alloftheleast squaresregressionfittingfunctionshavetheformf(x)=c1x+c0.The
coefficientsgenerated forthesefunctionsarehighlightedin the tablesbesideeachplotinFig.9.
WecanseeinFig.9a that,foragivenDW-KNNtopology,an increasein$decreasesFw(t).Table9aillustratesthecorresponding
leastsquaresregressionfunctionsgeneratedforeachtopology.It suggeststhatforagiventopology,Fw(t)decreasesslightlyand
sub-linearlyinfunctionof$.Moreover,theolivebandinFig.9ashows thatFw(t)issublinearlyincreasingwithregardtothenumberKin
theDW-KNNtopology.
InFig.9b,theaggregationqualityFag(t)inagiventopologyis
sublinearlyaffectedbyanincreasein$.Wecanseethatan increas-ing$yieldsadecreasingFag(t).Therelatedleastsquaresregression
functionsare depictedin Table9b. However,the olivebandin Fig.9bindicates thatFag(t)showsa small,decreasingdeviation
withregardtothenumberKintheDW-KNNtopology.Therefore, itremainsalmoststable.
ThemetricAMDE(t)wasalsoaffectedbynoise.Fig.9cshows thatasmorenoisewasintroducedintotheRAB,AMDE(t)deviated furtherfromzero.Ineachtopology,thereddashedlinesthat rep-resentlinearleastsquareregressionfittingfunctionsindicatesthat AMDE(t)sublinearlyincreaseswithregardstothevalueof$.On theotherhand,ananalysisoftheolivebandinFig.9cshowsthat, whateverthevalueofKis,AMDE(t)hasaconstantslight,sublinear increasethatseemsstable.
Theseobservationsareasexpected.MorenoiseintheRAByields moremismeasurementsofthedistances andbearingsto neigh-bouringrobots,which immediatelyaffects thequalityof allthe metrics.WhileattractingmorerobotsbyincreasingthenumberK intheDW-KNNtopologydoesnotseemstohaveagreatimpacton thequalityoftheaggregationortheaveragemeandistanceerror, itdoesincreasethequalityofFw(t).
8. ComparisontotheKNNaggregationapproach
Inourpreviousstudy(KhaldiandCherif,2016a),weproposed aKNNapproachforself-organizedaggregationinswarmrobotics
Fig.12.PerformancemetricsresultsfortheKNNandtheDW-KNNtopologicalaggregationapproacheswiththeMeanShiftnoisemodel(caseb=6andvariance0.1):(a)
Fdisp(t),(b)Fag(t)and(c)AMDE(t)obtainedfromtheoverallcontrollerimplementedonN=100foot-botrobotswhentakingintoconsiderationdifferentKNNandDW-KNN
topologies.Inallplots,thex-axisrepresentstheevolutionoftimestept.Eachcurverepresentsthemedianvaluesobtainedfrom5runswithdifferentinitialconfigurations
ofrobots.
Fig.13. PerformancemetricsresultsfortheKNNandtheDW-KNNtopologicalaggregationapproacheswiththeAuto-Correlatednoisemodelwherea=0.5:(a)Fdisp(t),(b)
Fag(t)and(c)AMDE(t)obtainedfromtheoverallcontrollerimplementedonN=100foot-botrobotswhentakingintoconsiderationdifferentKNNandDW-KNNtopologies.
Inallplots,thex-axisrepresentstheevolutionoftimestept.Eachcurverepresentsthemedianvaluesobtainedfrom5runswithdifferentinitialconfigurationsofrobots.
systems.Inthatapproach,theinteractionbetweentheneighbours wasgovernedbytheK-NearestNeighbours.Inthissection,we com-paretheproposedDW-KNNaggregationapproachwiththeKNN one.Tobettercomparetheperformanceofthetwoapproaches, weusedanothermetriccalledadispersionmetric.Thismetrichas beenusedbyGrahamandSloane(1990)toaddresstheproblem ofpennypackinginatwo-dimensionalplane.Also,thismetricwas adoptedbyGaucietal.(2014b)tostudyaggregationtaskinaswarm ofe-puckrobotswiththeassumptionofusingminimalresources. Unliketheaggregationtaskthatseekstogathertherobotstogether inanareaofanenvironment,thedispersionmetricisgenerally usedtomeasurethedispersionofaswarmrobots-systeminthe environment.HenceasstatedinthestudyofGrahamandSloane (1990),Gaucietal.(2014b),lowerboundsofthemetricare ana-lyzedasabaddispersionquality,meaningthatthepennies,aswell astherobots,aremostclosetotheircentroid,andthereforethiscan beconsideredasagoodaggregationsign.Here,wefollowthesame ideaandweadoptedparticularlythedispersionmetricproposed byGaucietal.(2014b)tomeasurethedispersionofourrobots.We
callthemetricFdisp(t),andweusedittomeasurethequalityof dispersionoftheentireswarm.
Todefinethismetric,firstthedispersionqualityDispi(t)ofa givenrobotisaveragedoveritsdifferentKneighboursasfollows (Gaucietal.,2014b): Dispi(t)=4.r1 s2 K
!
i=1 ci(t)2. (15)Thenthedispersionquality,Fdisp(t),oftheswarmisaveraged
overthenumberoftherobots, Fdisp(t)=N1
N
!
i=1
Dispi(t). (16)
Wherersrepresentstheradiusoftherobotandci(t)represent
thedistanceoftherobotfromthecenterofmassofthegroup,and itiscomputedasinEq.(11).The4rs2inthedenominatorserves
tonormalizeFdisp(t)such thatit becomes independentofrs for
Fig.14. PerformancemetricsresultsfortheKNNandtheDW-KNNtopologicalaggregationapproacheswiththeAuto-Correlatednoisemodelwherea=0.75:(a)Fdisp(t),(b)
Fag(t)and(c)AMDE(t)obtainedfromtheoverallcontrollerimplementedonN=100foot-botrobotswhentakingintoconsiderationdifferentKNNandDW-KNNtopologies.
Inallplots,thex-axisrepresentstheevolutionoftimestept.Eachcurverepresentsthemedianvaluesobtainedfrom5runswithdifferentinitialconfigurationsofrobots.
Fig.15.PerformancemetricsresultsfortheKNNandtheDW-KNNtopologicalaggregationapproacheswiththeuniformnoisemodel:(a)Fdisp(t),(b)Fag(t)and(c)AMDE(t)
obtainedfromtheoverallcontrollerimplementedonN=100foot-botrobotswhentakingintoconsiderationdifferentKNNandDW-KNNtopologies.Inallplots,thex-axis
representstheevolutionoftimestept.Eachcurverepresentsthemedianvaluesobtainedfrom5runswithdifferentinitialconfigurationsofrobots.
Now,weevaluatetheperformanceoftheproposedapproach as well as the KNN algorithm under the presence of complex noisemodels.Specifically,theperformancesofconventionalKNN approach and its extension, DW-KNN aggregationmethod, are comparedunderdifferentnoisemodels.
8.1. EffectofGaussiannoisewithmeanshiftontheperformance oftheproposedapproach
Inthissubsection,weinvestigatetheimpactofGaussiannoise withaconstantbiasontheperformanceoftheproposedapproach. Towardsthisend,weintroducedaGaussiannoisewithameanshift toboththerangeandbearingmeasurementsas:
Z′
i(t)=Zi(t)+εi(t), (17)
whereZ′
i(t)isthenoisymeasurement,Zi(t)isthetrue
measure-ment,andεi(t)isGaussiannoisewithconstantmeanbandunit
variance.Usingthisnoisemodel,weevaluatedtheperformanceof boththeDW-KNNandtheKNNaggregationapproachesunderthe presenceofmeasurementnoisewithtwodifferentlevels(i.e.,b=3,
6).Fig.10showstheresultsofthequalitymetricswhenaconstant biasofamplitudeequalb=3,whereasFig.11plotstheresultswhen b=6.FromFig.10,itcanbeseenthatbothapproachesconvergeto thesameFag(t)andAMDE(t)values(seeFig.10bandcfortheb=3
case,andFig.11bandcfortheb=6case).However,theDW-KNN hasaslightlylowerdispersioncomparedtothatoftheKNNmethod (seeFig.10aandFig.11a).Lowerdispersionmeansthattherobots areveryclosetotheirgroupcenterandthereforetheoverall aggre-gationperformanceoftheDW-KNNismuchbetterthantheKNN aggregationmethod.
Inanothersimulationsetup,weconductedsimulationwitha meanshiftconstantb=0.05andavariance0.1.Resultsareshown inFig.12.Similartotheabovenoisemodels,theKNNandthe DW-KNNaggregationapproachesconvergealmosttothesamequality ofaggregation,Fag(t)andtothesamemeandistanceerrorAMDE(t)
(seeFig.12bandc).However,theoverallaggregationperformance oftheDW-KNNapproachisbetterthantheKNNduetothefactthat itgiveslowerdispersionqualitythantheKNNapproachinthecase ofK={3,4,5}(seeFig.12a).Noticealsothatforbothapproaches intheabovecasesstudies,Fdisp(t)convergesalmosttothesame
valueincasek=2andthatitslightlyincreasesincasek={3,4,5}. Thisisasexpected,aggregatingrobotsbyformingameshofmore thantworobots(k>2),willattractmoreweightedrobotstothe centeroftheirgroupwhenusingaDW-KNNapproachthantheKNN approach.Itcanalsobeseenthatwhennoiselevelincreasesthe aggregationqualityintermofthedispersiondegradebyincreasing thedispersionmetric.Theresultsalsoshowthatmoderatenoise levelhasnosignificantimpactontheAMDE(t)andFag(t).
8.2. Effectofautocorrelatednoiseontheperformanceproposed approach
Inthissubsection,theperformanceoftheDW-KNNand KNN-basedneighborhoodtopologywillbeinvestigatedinthepresence of autocorrelated noise. Towards this end, the performance of DW-KNNandKNNapproacheshavebeenstudiedwhenthe mea-surement noise is generated from a first-order autoregressive process,orAR(1).Specifically,themeasurementnoiseoftherange andbearingsensorsaregeneratedusinganAR(1)modelasfollow:
7
Z′
i(t)=Zi(t)+)i(t)
)i(t)=a)i(t−1)+εi(t) , (18) whereZ′
i(t)isthenoisymeasure,Zi(t)isthetruemeasure,ais
theautocorrelationcoefficientwithlag1,and
*
i(t)isaGaussiandistributionof0meansandastandarddeviation1.
Withthisnoisemodel,weinvestigatedtheperformanceofthe twoapproachesbyconductingsimulationsfordifferentvaluesof theAR-parametera={0.5,0.75}.Figs.13and14plotsuccessively theresultsofthetwobasedtopologicalapproachesforthe differ-entvaluesofa.Inbothvaluesofa,theanalysisresultsareclose totheanalysisdepictedinthepreviousnoisemodelswherethe twoapproachesconvergenearlytothesameFag(t)andthesame
AMDE(t)inahand.Inanotherhand,theDW-KNNapproachgives moredispersionqualitythantheKNNapproach(alowervalueis better).Inaddition,thetwoapproaches convergealmosttothe samedispersionqualityincasek=2andthattheyslightlydiverge linearlyto different values in case k={3, 4, 5}. This is also as expectedwhengroupingtherobotsbyformingameshofmore thantworobots(k>2),usingaDW-KNNapproachwillattractmore weightedrobotstothecenteroftheirgroupthantheKNNapproach. Alikethepreviousnoisemodel,itcanbealsoseenthatwhenAR coefficientincreases(highlycorrelatednoise)theaggregation qual-ityintermofthedispersiondegradebyincreasingthedispersion metric,andtheresultsalsoshowthatnoisewithmoderate autocor-relationhasnosignificantimpactontheAMDE(t)andFag(t).Notice
alsothattheoverallaggregationmetricstakemuchtimestepstobe convergedwhilecomparedtothepreviousnoisemodels.Ascanbe seeninalltherelatedfigures,thetimeconvergenceofthemetrics isproportionaltothevalueoftheautoregressivecoefficient(fora greatervalueofathetimeconvergenceofthemetricsislong). 8.3. Effectofuniformnoiseontheperformanceproposed approach
Inthiscasestudy,rangeandbearingsensorsnoisearegenerated froma uniformdistributionof[−3,3cm]fora range measure-mentandof[−5◦,5◦]forabearingmeasure.Fig.15illustratesthe
resultsofKNNandDW-KNNbasedtopologicalapproaches.Like theothernoisemodels,boththeKNNandtheDW-KNN aggrega-tionapproachesconvergealmosttothesamequalityofaggregation andtothesamemeandistanceerror(seeFig.15bandc).Butthe DW-KNNapproachgiveslowerdispersionqualitythantheKNN approachin thecaseof K={3,4, 5}(seeFig.15c),which mean thattherobotsarebetterclosetotheircenterofmasse,andhence itis agoodsignofaggregationperformance.However,thetwo
approachesperformslightlyinasimilarwaywhenK=2.Thiscan beexpectedasinthepreviousnoisemodels,whengroupingrobots bymorethentworobots(k>2),theDW-KNNapproachwillattract moreweightedrobotstothecenteroftheirgroupthantheKNN one.Alsoasanalyzedinthepreviousnoisemodels,theaggregation qualityintermofthedispersiondegradebyincreasingthe disper-sionmetric,andtheresultsalsoshowthatuniformnoisemodelhas nosignificantimpactontheAMDE(t)andFag(t).
9. Conclusionsandfurtherwork
Whenstudyingthecollectivebehavioursofalargenumberof individualrobots,theinter-robotdistancecanbeofkey impor-tance,butadditionalpropertiessuchasthedensityofrobotscould havea greaterimpactonthecollectivebehaviourof thewhole swarm.Here wereliedonboththedistanceandthedensityas equalkeyfactors,andweproposedaDW-KNN-based neighbour-hoodtopologytostudyself-organizationinanaggregatingrobot swarm.Withthistopology,weusedthevirtualviscoelastic-based proximalmodeldevelopedinourpreviouswork(KhaldiandCherif, 2016a)tokeepandarrangetheneighbourstogether.DW-KNNwas achievedbydefining a distance-weightedfunction basedonan SPHinterpolationapproachtoestimatethedensityofrobotsinthe swarm.
Also, the proposed algorithm exhibited high efficiency to smoothly drive the robotsswarm to achieve cubic based self-organizedaggregationsinthepresenceandabsenceofobstacles inthearena.Theproposedapproachcouldbehelpfulinasituation whenattractingalargescaleofrobotsfromoneareatoanother whilemaintainingaconnectednessbetweentherobotsand avoid-ingcollisions.
Various self-organized aggregations are achieved using the ARGoSsimulatorinbothabsenceandpresenceofobstacles,and performanceanalysiswithinthreemetricsshowstheefficacyof theproposedapproach.Theeffectofnoiseintherobotrangeand bearingsensingcapabilitiesisalsoaddressedinthisstudyshowing howtheproposedmodelisbehavinginsuchcircumstance.
Furthermore,theproposed methodshowedsuperior perfor-mancecompared totheKNN approach inpresence ofdifferent noisemodels(i.e.,uniform,Gaussiannoisewithmean-shift,and Auto-Correlatednoisemodels).
Moreover,inthepresentapproachthechoiceofthedensity esti-mationmethodtobeusedtoweightthedistancescouldplay a crucialroleintheemergenceoftheself-organizedaggregations. Thisislettothescenarioinwhichtheapproachwillbeapplied.For example,webelievethatwiththeproposedaggregationapproach, various B-spline based self-organized aggregations couldeasily emergebyadoptingotherkernelfunctionsintheSPHdensity esti-mationmethodssuchasthosebasedontheSchoenbergB-spline functions(Schoenberg,1988)(i.e.,theM5quarticfunctionsand theM6quanticfunctions(Price,2012)).Moreover,different den-sityestimationmethodsthatdifferfromtheSPHapproach(i.e., Gaussiankerneldensityestimationmethod)couldbeusedasan alternativetoachievedifferentself-organizedaggregations,orto drivetheswarmofrobotstoadesireddensitydistribution. There-fore,weopenadoorforfurtherstudiesonhowtoselectthedensity estimationmethodforagivenscenario.
Inthelightoftheabovepointsandasfuturework,weplan tofiltermeasurementsnoisetoenhancetheperformanceofthe model.Weplanalsotostudytheimpactoftherobotdensityon self-organizedaggregationbyincorporatingdifferentSPH density-estimationmethodsandusingotherdensityestimationtechnics thatdiffersfromtheSPHone.Moreattentionshouldalsobegiven tohowarobotswarmcollectivelydecidestoadaptthevaluesofK todynamicallyswitchitsneighbouringrelationships.
Algorithm2. PartII
References
Ando,H.,Oasa,Y.,Suzuki,I.,Yamashita,M.,1999.Distributedmemorylesspoint
convergencealgorithmformobilerobotswithlimitedvisibility.IEEETrans. Robot.Autom.15(5),818–828.
Arvin,F.,Samsudin,K.,Ramli,A.R.,Bekravi,M.,2011.Imitationofhoneybee
aggregationwithcollectivebehaviorofswarmrobots.Int.J.Comput.Intell. Syst.4(4),739–748.
Arvin,F.,Turgut,A.E.,Bellotto,N.,Yue,S.,2014a.Comparisonofdifferent
cue-basedswarmaggregationstrategies.In:InternationalConferencein SwarmIntelligence.Springer,pp.1–8.
Arvin,F.,Turgut,A.E.,Bazyari,F.,Arikan,K.B.,Bellotto,N.,Yue,S.,2014b.Cue-based
aggregationwithamobilerobotswarm:anovelfuzzy-basedmethod.Adapt. Behav.22(3),189–206.
Arvin,F.,Turgut,A.E.,Krajník,T.,Yue,S.,2016.Investigationofcue-based
aggregationinstaticanddynamicenvironmentswithamobilerobotswarm. Adapt.Behav.24(2),102–118.
Ballerini,M.,Cabibbo,N.,Candelier,R.,Cavagna,A.,Cisbani,E.,Giardina,I.,
Lecomte,V.,Orlandi,A.,Parisi,G.,Procaccini,A.,etal.,2008a.Interactionruling
animalcollectivebehaviordependsontopologicalratherthanmetricdistance: evidencefromafieldstudy.Proc.Natl.Acad.Sci.105(4),1232–1237.
Ballerini,M.,Cabibbo,N.,Candelier,R.,Cavagna,A.,Cisbani,E.,Giardina,I.,Orlandi,
A.,Parisi,G.,Procaccini,A.,Viale,M.,etal.,2008b.Empiricalinvestigationof
starlingflocks:abenchmarkstudyincollectiveanimalbehaviour.Anim. Behav.76(1),201–215.
Bodi,M.,Thenius,R.,Szopek,M.,Schmickl,T.,Crailsheim,K.,2012.Interactionof
robotswarmsusingthehoneybee-inspiredcontrolalgorithmbeeclust.Math. Comput.Model.Dyn.Syst.18(1),87–100.
Bodi,M.,Möslinger,C.,Thenius,R.,Schmickl,T.,2015.BEECLUSTusedfor
explorationtasksinautonomousunderwatervehicles.In:8thVienna InternationalConferenceonMathematicalModelling,vol.48,no.1,IFAC,pp. 819–824.
Bonani,M.,Longchamp,V.,Magnenat,S.,Rétornaz,P.,Burnier,D.,Roulet,G.,
Vaussard,F.,Bleuler,H.,Mondada,F.,2010.Themarxbot,aminiaturemobile
robotopeningnewperspectivesforthecollective-roboticresearch.In:2010 IEEE/RSJInternationalConferenceonIntelligentRobotsandSystems(IROS), IEEE,pp.4187–4193.
Broly,P.,Mullier,R.,Deneubourg,J.-L.,Devigne,C.,2012.Aggregationinwoodlice:
socialinteractionanddensityeffects.ZooKeys176,133.
Broly,P.,Deneubourg,J.-L.,Devigne,C.,2013.Benefitsofaggregationinwoodlice:
afactorintheterrestrializationprocess?InsectesSociaux60(4),419–435.
Camazine,S.,Deneubourg,J.-L.,Franks,N.,Sneyd,J.,Theraulaz,G.,Bonabeau,E.,
2002.Self-OrganizationinBiologicalSystems.PrincetonUniversityPress.
Correll,N.,Martinoli,A.,2011.Modelinganddesigningself-organizedaggregation
In:2012IEEE/RSJInternationalConferenceonIntelligentRobotsandSystems (IROS),IEEE,pp.539–544.
Gauci,M.,Chen,J.,Dodd,T.J.,Groß,R.,2014a.Evolvingaggregationbehaviorsin
multi-robotsystemswithbinarysensors.In:DistributedAutonomousRobotic Systems.Springer,pp.355–367.
Gauci,M.,Chen,J.,Li,W.,Dodd,T.J.,Groß,R.,2014b.Self-organizedaggregation
withoutcomputation.Int.J.Robot.Res.33(8),1145–1161.
Gordon,N.,Wagner,I.A.,Bruckstein,A.M.,2004.Gatheringmultiplerobotic
a(ge)ntswithlimitedsensingcapabilities.In:InternationalWorkshoponAnt ColonyOptimizationandSwarmIntelligence.Springer,pp.142–153.
Gordon,N.,Elor,Y.,Bruckstein,A.M.,2008.Gatheringmultipleroboticagentswith
crudedistancesensingcapabilities.In:InternationalConferenceonAntColony OptimizationandSwarmIntelligence.Springer,pp.72–83.
Gou,J.,Du,L.,Zhang,Y.,Xiong,T.,etal.,2012.Anewdistance-weightedk-nearest
neighborclassifier.J.Inf.Comput.Sci.9(6),1429–1436.
Graham,R.L.,Sloane,N.J.,1990.Penny-packingandtwo-dimensionalcodes.
DiscreteComput.Geometry5(1),1–11.
Hemelrijk,C.K.,Hildenbrandt,H.,2012.Schoolsoffishandflocksofbirds:their
shapeandinternalstructurebyself-organization.InterfaceFocus, rsfs20120025.
Holland,O.,Melhuish,C.,1997.Aninteractivemethodforcontrollinggroupsizein
multiplemobilerobotsystems.In:Proceedings,8thInternationalConference onAdvancedRobotics,1997.ICAR’97,IEEE,pp.201–206.
Jeanson,R.,Rivault,C.,Deneubourg,J.-L.,Blanco,S.,Fournier,R.,Jost,C.,Theraulaz,
G.,2005.Self-organizedaggregationincockroaches.Anim.Behav.69(1),
169–180.
Kernbach,S.,Thenius,R.,Kernbach,O.,Schmickl,T.,2009.Re-embodimentof
honeybeeaggregationbehaviorinanartificialmicro-roboticsystem.Adapt. Behav.17(3),237–259.
Khaldi,B.,Cherif,F.,2016a.Avirtualviscoelasticbasedaggregationmodelfor
self-organizationofswarmrobotssystem.In:ConferenceTowards AutonomousRoboticSystems.Springer,pp.202–213.
Khaldi,B.,Cherif,F.,2016b.Swarmrobotscircleformationviaavirtualviscoelastic
controlmodel.In:20168thInternationalConferenceonModelling, IdentificationandControl(ICMIC),IEEE,pp.725–730.
Khaldi,B.,Harrou,F.,Cherif,F.,Sun,Y.,2017.Monitoringarobotswarmusinga
data-drivenfaultdetectionapproach.Robot.Auton.Syst.97,193–203.
Kube,C.R.,Zhang,H.,1993.Collectiverobotics:fromsocialinsectstorobots.Adapt.
Behav.2(2),189–218.
swarmsbasedonhydrodynamicmodels.In:IEEEInternationalConferenceon RoboticsandAutomation,2008.ICRA2008,IEEE,pp.1948–1953.
Pimenta,L.C.,Pereira,G.A.,Michael,N.,Mesquita,R.C.,Bosque,M.M.,Chaimowicz,
L.,Kumar,V.,2013.Swarmcoordinationbasedonsmoothedparticle
hydrodynamicstechnique.IEEETrans.Robot.29(2),383–399.
Pinciroli,C.,Trianni,V.,O’Grady,R.,Pini,G.,Brutschy,A.,Brambilla,M.,Mathews,
N.,Ferrante,E.,DiCaro,G.,Ducatelle,F.,etal.,2012.ARGoS:amodular,parallel,
multi-enginesimulatorformulti-robotsystems.SwarmIntell.6(4),271–295.
Pini,G.,Dorigo,M.,Birattari,M.,2009.TowardsCollectiveRoboticsina3DSpace:
SimulationWithHand-BotRobots,IRIDIA.UniversitéLibredeBruxelles,Tech. Rep.
Price,D.J.,2012.Smoothedparticlehydrodynamicsandmagnetohydrodynamics.J.
Comput.Phys.231(3),759–794.
Schoenberg,I.J.,1988.Contributionstotheproblemofapproximationof
equidistantdatabyanalyticfunctions.In:IJSchoenbergSelectedPapers. Springer,pp.3–57.
Soysal,O.,Sahin,E.,2005.Probabilisticaggregationstrategiesinswarmrobotic
systems.In:SwarmIntelligenceSymposium,2005.SIS2005.Proceedings2005 IEEE,IEEE,pp.325–332.
Soysal,O.,Bahc¸eci,E.,S¸ah˙In,E.,2007.Aggregationinswarmroboticsystems:
evolutionandprobabilisticcontrol.Turk.J.Electr.Eng.Comput.Sci.15(2), 199–225.
Spears,W.M.,Spears,D.F.,Hamann,J.C.,Heil,R.,2004.Distributed,physics-based
controlofswarmsofvehicles.Auton.Robots17(2–3),137–162.
Trianni,V.,Groß,R.,Labella,T.H.,S¸ahin,E.,Dorigo,M.,2003.Evolvingaggregation
behaviorsinaswarmofrobots.In:EuropeanConferenceonArtificialLife. Springer,pp.865–874.
Violeau,D.,Rogers,B.D.,2016.Smoothedparticlehydrodynamics(sph)for
free-surfaceflows:past,presentandfuture.J.Hydraul.Res.54(1),1–26.
Wahby,M.,Weinhold,A.,Hamann,H.,2016.Revisitingbeeclust:aggregationof
swarmrobotswithadaptivenesstodifferentlightsettings.In:Proceedingsof the9thEAIInternationalConferenceonBio-inspiredInformationand CommunicationsTechnologies(formerlyBIONETICS),ICST(Institutefor ComputerSciences,Social-InformaticsandTelecommunicationsEngineering), pp.272–279.
Zhao,S.,Ramakrishnan,S.,Kumar,M.,2011.Density-basedcontrolofmultiple
robots.In:Proceedingsofthe2011AmericanControlConference,IEEE,pp. 481–486.