Université Mohammed Seddik Benyahia – Jijel
Faculté des Sciences et de la Technologie Département d’Automatique
Mémoire
Présenté parAmine KENNOUCHE
Pour l’obtention du diplôme de MasterOption : Automatique et Informatique Industrielle
Thème
Proposé et dirigé par
Dr. Dounia SAIFIA
Promotion 2020
Commande non-PDC robuste pour le contrôle de la
dynamique latérale d’un véhicule autonome
Avant toute chose, Je remercie Dieu le tout puissant de m’avoir donnée courage, force et
surtout patience durant toutes ces années d’étude.
La réalisation de ce mémoire a été possible grâce au concours de plusieurs personnes à qui
je voudrais témoigner toute ma reconnaissance.
Je voudrais tout d'abord adresser toute ma gratitude à ma directrice de mémoire, Madame
Dounia SAIFIA, pour l’aide compétente qu’elle m’a apportée, pour sa patience et son
encouragement. Son œil critique m’a été très précieux pour structurer le travail et pour
améliorer la qualité des différentes sections. Je remercie très chaleureusement M.
Abdessamed GUERRAICHE pour son amitié, et l’aide précieuse qu’il m’a
apporté tout au long de ce travail.
JE remercie les membres de jury d’avoir accepter de juger et évaluer mon travail.
Enfin, Je remercie profondément,
Ma famille, mes amis ainsi que les personnes qui m’ont soutenu de près ou de loin au cours
de la réalisation de ce mémoire.
Dédicaces
Au meilleur des pères
A ma très chère maman
Qu’ils trouvent en moi la source de leur fierté
A qui je dois tout
A mes sœurs et mes frères
A qui je souhaite un avenir radieux plein de réussite
A mes Amis
Chapitre 1 : Modélisation d’un véhicule automobile
1.1 Introduction ... 4
1.2 Mouvements et organes du véhicule ... 5
1.2.1 Mouvements du véhicule ... 5
1.2.2 Organes du véhicule ... 6
1.3 Principe de base de contrôle de véhicule autonome ... 9
1.3.1 Modèle non linéaire de la dynamique latéral d’un véhicule ... 9
1.4 Equations de la dynamique du mode latéral d’un véhicule ... 10
1.4.1 Notations et repères ... 10
1.4.2 Equations de la dynamique ... 12
1.4.3 Modèle dérive-lacet (Bicyclette). ... 17
1.5 Conclusion ... 20
Chapitre 2 : Vers la représentation multimodèle du modèle de contrôle de
trajectoire du véhicule
2.1 Introduction ... 212.2 Représentation d’état du modèle bicyclette ... 21
2.3 Positionnement des véhicules routiers sur la voie ... 22
2.4 Modèle de contrôle du véhicule ... 23
2.5 Présentation des modèles flous de type Takagi-Sugeno (T-S) ... 24
2.6 Obtention des modèles flous de type Takagi-Sugeno (T-S) ... 27
2.6.1 Par identification ... 27
2.6.2 Par linéarisation... 27
2.6.3 Par transformation d’un système non linéaire polytopique convexe ... 28
2.7 Représentation du modèle de contrôle de véhicule par un modèle de Takagi-Sugeno ... 39
2.8 Validation de représentation des multimodèles ... 34
3.2 Analyse convexe et inégalité matricielle ... 38
3.2.1 Analyse convexe ... 38
3.2.2 Inégalités Matricielles Linéaires (LMI) ... 39
3.3 Stabilité et stabilisation quadratique des modèles flous de Takagi-Sugeno ... 41
3.3.1 Stabilité quadratique des modèles flous de T-S ... 41
3.3.2 Fonctions de Lyapunov usuelles ... 41
3.3.3 Stabilisation quadratique des modèles flous de T-S... 44
3.4 Autres lois de commande. ... 48
3.5 Concept de base de la commande H ... 48
3.5.1 Problème
H
optimal ... 493.5.2 Problème
H
sous-optimal ... 493.5.3 La norme ... 49
3.6 Contrôle
H
de la trajectoire du véhicule ... 503.6.1 Architecture de la Boucle de Commande ... 50
3.6.2 Stabilisation
H
du véhicule autonome ... 513.6.3 Commande PDC du véhicule autonome ... 51
3.6.4 Synthèse
H
d’une commande PDC stabilisante ... 523.6.5 Résultats de simulation ... 56
3.7 Conclusion ... 62
Chapitre 4 : Commande non-PDC de la dynamique latérale d'un véhicule
4.1 Introduction ... 634.2 Limites de l’approche quadratique ... 63
4.3 Intérêt de l’utilisation de fonction de Lyapunov non quadratique ... 64
4.4 Stabilité non quadratique des modèles T-S discrets. ... 64
4.4.1 Analyse de la stabilité : 1𝑖è𝑟𝑒 approche ... 64
H
4.7 Relaxation des conditions LMIs et amélioration de la poursuite ... 69
4.8 Résultats de simulation ... 73
4.9 Conclusion ... 82
Conclusion générale ...84
FIG. 1.1– Les différents mouvements du véhicule ...5
FIG. 1.2– Les organes constitutifs du mode longitudinal ...7
FIG. 1.3– Les organes constitutifs du mode latéral ...7
FIG. 1.4– Suspension type McPherson ...8
FIG. 1.5– Passage de Ra à Rv ...11
FIG. 1.6– (a) Passage de v R à i R, (b) Passage de i R à c R ...12
FIG.1.7– Mouvements du véhicule ...13
FIG.1.8– Mouvement du véhicule dans le système d’axes (x,y) ...13
FIG. 1.9– Dynamique du châssis du véhicule...14
FIG.1.10– Modèle de bicyclette...17
FIG.1.11– Vecteurs vitesses et angles sous les roues du véhicule ...18
FIG.2.1– Positionnement du véhicule sur la voie ...22
FIG.2.2– Vitesse de véhicule vx ...34
FIG.2.3– Fonctions d’appartenances du modèle T-S ...35
FIG.2.4– Réponses du système non linéaire et le modèle T-S Cas continu ...35
FIG.2.5– Réponses du système non linéaire et le modèle T-S Cas discret ...36
FIG.3.1– Représentation du concept PDC. ...45
FIG.3.2– Problème standard général. ...48
FIG.3.3– Illustration d'un système en boucle fermée. ...50
FIG.3.4– Résultats de commande HCas continu ... 58
FIG.3.5– Signal de commande HCas continu. ... 59
FIG.3.6– Résultats de commande HCas discret. ... 59
H
FIG.3.9– Courbature de trajectoire ρ ...60 FIG.3.10– Trajectoire du véhicule effectuée par le contrôleur de suivi automatique de la trajectoire cas continu. ...61 FIG.3.11– Trajectoire du véhicule effectuée par le contrôleur de suivi automatique de la trajectoire cas discret. ...61
FIG.4.1– Résultats de commande H ; cas de modèle de contrôle (8 règles). ...77 FIG.4.2– Signal de commande H ; cas de modèle de contrôle (8 règles). ...78 FIG.4.3– Trajectoire du véhicule effectuée par le contrôleur de suivi automatique de la trajectoire, cas de T-S avec 8 règles. ...78
FIG.4.4– Résultats de commande H ; cas de modèle réduit (2 règles). ...78 FIG.4.5– Signal de commande H ; cas de modèle réduit (2 règles). ...79
FIG.4.6– Trajectoire du véhicule effectuée par le contrôleur de suivi automatique de la trajectoire, cas de T-S avec 2 règles. ...79
FIG.4.7– Résultats de commande H avec relaxations ; cas de modèle de contrôle (8 règles). ...79
FIG.4.8– Signal de commande Havec relaxations ; cas de modèle de contrôle (8 règles). ...80 FIG.4.9– Trajectoire du véhicule effectuée par le contrôleur de suivi automatique de la trajectoire, cas de T-S avec relaxations (8 règles). ...80
FIG.4.12– Trajectoire du véhicule effectuée par le contrôleur de suivi automatique de la trajectoire, cas de T-S avec relaxations (2 règles). ...81 FIG.4.13–Réponses de système en boucle fermé de commande H dans les deux cas, quadratique et non-quadratique en termes de l’erreur latérale et l’erreur sur l’angle de cap. ...82
Tableau.2.1– Valeurs numériques des paramètres du véhicule ...34
Tableau.3.1– Paramètres de commande PDC cas continu. ...57
Tableau.3.2– Paramètres de commande PDC cas discret. ...57
Tableau.4.1– Paramètres de commande pour le modèle à huit modèles locaux. ...74
Tableau.4.2– Paramètres de commande pour le modèle à huit modèles locaux avec relaxation. ...76
Tableau.4.3– Paramètres de commande pour le modèle à deux modèles locaux. ...76
Tableau.4.4– Paramètres de commande pour le modèle à deux modèles locaux avec relaxation. ...77
Tableau.4.5– Valeur de
pour chaque loi de commande. ...81
𝑥(.) : Variables d’états.
𝑢(.) : Variable d’entrée (la commande). 𝑦(.) : Variable de sortie.
z(.) : Variable de prémisse.
i
h : Fonction d’activation.
𝐹𝑋 : Les forces longitudinales. 𝐹𝑦 : Les forces latérales. 𝑀𝑍 : Le moment de lacet.
𝑣𝑥 : La vitesse longitudinale du véhicule. 𝑣𝑦 : La vitesse latérale du véhicule. 𝑟 : La vitesse de lacet.
R : Rayon de la roue.
𝛼 : L'angle de dérive de la roue.
𝑎 : Distance perpendiculaire entre le train avant et le centre de gravite. 𝑏 : Distance perpendiculaire entre le train arrière et le centre de gravite. 𝛿 : Angle de braquage des roues directrices.
𝛽 : L'angle de dérive du véhicule. ∗∗𝑓𝑙 : Désignation : avant gauche. ∗∗𝑓𝑟 : Désignation : avant droite. ∗∗𝑟𝑟 : Désignation : arrière droite. ∗∗𝑟𝑙 : Désignation : arrière gauche.
𝐶𝛼𝑓 : Coefficient de raideur d’envisage des essieux avant. 𝐶𝛼𝑟 : Coefficient de raideur d’envisage des essieux arrière.
r
: Courbature de la route.
f : La force résultante de l’action du vent latéral.
l/l : Distance perpendiculaire entre le train avant/arrière et le centre de gravité. s
ABRIVIATION
NL : Non linéaire.
T-S : Takagi-Sugeno.
LMI : Linear matrix Iniquality (Inégalité Matricielle Linéaire).
PDC : Parallel Distributed Compensation (loi de commande basée sur le retour d’état).
INTRODUCTION
GENERALE
1
Introduction générale
es dernières décennies, la recherche dans le domaine des transports routiers a fait l’objet d’une attention particulière et intéresse de plus en plus les laboratoires, les chercheurs, les industriels et les équipementiers automobiles. En effet, plusieurs programmes de recherche nationaux ou internationaux ont été instaurés pour répondre aux problèmes liés à l’évolution des moyens de transports, leur gestion et leur sécurité. Les principaux objectifs ciblés sont : l’amélioration de la fluidité du trafic routier, l’augmentation de l’efficacité de l’infrastructure routière, l’amélioration de la sécurité et du confort des passagers et l’aide à la conduite [4].
La voiture joue un rôle prépondérant dans l’amélioration de notre qualité de vie, en rendant accessible un plus grand espace de liberté de mouvement à chacun d’entre nous. Nous pouvons donc, facilement imaginer les enjeux économiques et commerciaux qui en découlent.
Le véhicule automobile reste l’une des principales causes de mortalité de notre vie moderne, et ce malgré les efforts consentis par les politiques en matière de prévention, d’information et de répression et ceux des constructeurs automobiles en matière de sécurité passive (air bag, caisse à déformation programmée, …) et de sécurité active (ABS, ESP, ...). Cet état de fait réside dans l’intervention de l’homme sur des processus complexes qui régissent la conduite (maintien du véhicule sur la route, respect de règles pas toujours évidentes, ...) et qui ne sont pas toujours adaptés à ses propres limites physiologiques (acuité visuelle, évaluation de distances, perte d’attention, énervement, ...), mais que les avancées technologiques de ces dernières années tentent de rendre plus facile. Avec les progrès de l’automatique, de l’informatique, des télécommunications et de la miniaturisation des instruments, les chercheurs sont aujourd’hui en mesure de développer des systèmes d’aide à la conduite automatisant certaines tâches, en introduisant de nouveaux dispositifs de sécurité afin d'améliorer la sécurité en augmentant la stabilité du véhicule dans les cas où les accélérations longitudinales ou latérales se produisent, dans lequel, les systèmes doivent agir sur la contrôlabilité du véhicule pour que ce dernier répond plus rapidement aux sollicitations du conducteur [1].
2
L’objectif étant d’élaborer des stratégies d’assistance au contrôle latéral de véhicule routier. Pour atteindre ce but il est indispensable de modéliser le véhicule.
La modélisation des véhicules légers se révèle particulièrement délicate et complexe. Afin de reproduire de manière réaliste le comportement dynamique du véhicule, la prise en compte des différentes composantes, des différents mouvements du châssis et de la caisse rend le travail compliqué. Un modèle mathématique simplifié, décrivant les mouvements de ce dernier, doit être en mesure de contribuer de façon notable à la compréhension de certains phénomènes et d’aider à la détermination et la validation de lois de commande. Sous certaines hypothèses simplificatrices, un modèle réduit analytique est obtenu. Il s’agit du modèle bicyclette. Ce modèle servira aussi lors de la synthèse des correcteurs [5].
Nous proposons dans notre travail d’élaborer une loi de commande PDC (Parallel Distributed Compensation) et non-PDC basée sur la représentation multimodèle et plus précisément par la classe des multimodèles à état unique (modèle de Takagi-Sugeno) dans les deux cas continu et discret [10,30]. En effet, cette approche nous permet de fournir une représentation efficace du système non linéaire sous forme d’interpolation entre des modèles linéaires. En se basant sur cette représentation, des conditions de stabilisation sont dérivées et formulées sous forme LMIs (Linear Matrix Inequalities). Pour la synthèse des performances et en particulier le rejet de perturbation, une synthèse de correcteurs Hbasée sur une loi de commande PDC est proposée. Le problème Hconsiste à minimiser l’effet de perturbation sur
le comportement de système. Par la suite et pour renforcer la robustesse de la commande, une loi de commande NonPDC basée sur l’approche non quadratique de Lyapunov est conçue. Finalement, les conditions de stabilisation non-quadratiques issues sont relâchées par des méthodes de relaxation.
Les travaux développés dans ce mémoire sont structurés en quatre chapitres :
Dans le premier chapitre, nous donnons quelques définitions sur les mouvements et les organes d’un véhicule ainsi que les éléments nécessaires pour la modélisation de la dynamique de notre système. L’ensemble des équations nécessaires pour aboutir à un modèle de dynamique latérale sera présenté. A partir de ces équations nous pouvons obtenir un modèle
3
non linéaire basé sur le modèle bicyclette qui, par la suite, sera utilisé dans les chapitres qui suivent.
Dans le deuxième chapitre, nous présentons le modèle de contrôle de véhicule. Une description sous la forme multimodèles du système non linéaire dans les deux cas continu et discret sera fourni. Les méthodes de génération d’un modèle de Takagi-Sugeno à partir d’un système non linéaire sont également exposées.
Le troisième chapitre consacré aux notions et outils utilisés dans la synthèse d’une loi de commande. Nous présentons également l’outil LMI et les différentes techniques d’analyse de stabilité ainsi que des théorèmes. Par la suite, nous donnons les conditions garantissant la stabilité et la stabilisation via la commande PDC d’un modèle TS basée sur la seconde méthode de Lyapunov. On finira le chapitre par l’application de la commande sur le modèle de contrôle de véhicule.
Le dernier chapitre est consacré à l’approche non-quadratique. L’analyse de stabilité ainsi que la synthèse d’une loi de commande multimodèle. La formulation LMI du problème de stabilisation via la loi de commande non-PDC sera développée. Un modèle réduit pour le contrôle de véhicule sera utilisé dans le but de relâcher les conditions LMIs. Après on finira le chapitre par l’application de la commande sur les deux modèles (complet et réduit).
4
1.1 Introduction
Un véhicule est un ensemble de corps reliés entre eux par plusieurs liaisons visant d’une part à assurer le mouvement du châssis mais aussi le confort des passagers qu’il transporte. Il est composé d’un châssis, et d’un système de liaison au sol comprenant : les pneumatiques, les roues, les trains et les suspensions.
Toute commande est conçue à partir d’un modèle idéalisé et simplifié d’un système réel qui peut être méconnu, mal identifié, en outre non linéaire et/ou non stationnaire. La commande doit non seulement imposer la réponse du processus, mais également maintenir son comportement face aux dérives des paramètres physiques, aux perturbations externes et cela, en dépit des imperfections du modèle [1].
L'objectif étant d'élaborer des stratégies d'assistance au contrôle latéral de véhicule routier léger, il est indispensable de modéliser le véhicule. Depuis quelques années, la modélisation des véhicules routiers pour le contrôle automatique et plus généralement pour le contrôle global de châssis est la préoccupation des chercheurs [1 - 3].
Le véhicule est un système mécanique complexe dans la mesure où il possède des caractéristiques non linéaires introduites notamment par des organes de liaison tels que des ressorts et amortisseurs. De plus, il est l'objet de nombreuses variations de paramètres tels que la masse, la vitesse et l'adhérence par exemple.
Dans ce chapitre, nous présentons quelques éléments nécessaires à la modélisation et le contrôle d’un véhicule automobile dans le cadre de suivi de trajectoire ainsi le modèle non linéaire de la dynamique du mode latéral d’un véhicule. Nous commençons tout d’abord par montrer les différents mouvements et les principaux éléments qui la constitue. Ensuite, un véhicule complet est modélisé. Sous certaines hypothèses simplificatrices, le modèle non linéaire d’un véhicule dit modèle bicyclette automobile est présenté pour l’étude du comportement latéral du véhicule.
5
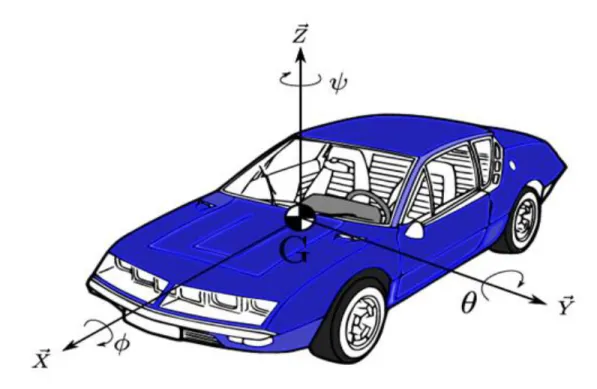
1.2 Mouvements et organes du véhicule 1.2.1 Mouvements du véhicule
Le véhicule automobile représenté sur la figure 1.1 est un système complexe possédant six degrés de liberté constitués par un ensemble de rotations et de translations de la caisse qui est considérée comme une masse suspendue. Le système d’axes par rapport auquel sont définis les différents mouvements du véhicule est le repère orthonormé direct R G x y z( , , , ) de la figure 1.1. L’origine de ce repère est prise au centre de gravité du véhicule. La translation sur l’axe
Gx caractérise le déplacement longitudinal xdu véhicule et le déplacement latéralyse fait selon l’axeGy. La translation sur l’axe Gz permet le mouvement vertical
z
de la caisse du véhicule par l’intermédiaire de ses suspensions. Par ailleurs, les mouvements de rotations de la caisse par rapport aux trois axes sont [4] :• Le roulis (φ) qui est dû à des oscillations autour de l’axe Gx , phénomène en particulier ressenti lorsque le véhicule se déplace dans un virage.
• Le tangage (θ) qui est produit par des mouvements angulaires autour de l’axe Gy,
phénomène qui intervient lors des phases d’accélération et de freinage. • Le lacet (ψ) qui est le mouvement de rotation autour de l’axe .Gz
6
1.2.2 Organes du véhicule
Le véhicule est une structure mécanique composée de plusieurs éléments. Chaque dispositif a une fonction bien précise qu’il est nécessaire de bien comprendre pour la modélisation. Le moteur et les transmissions assurent la production des efforts de traction ainsi que leur transmission aux roues. Les trains roulants, la suspension et la direction concourent à guider le véhicule, à transmettre les forces motrices et de freinage tout en assurant le confort des passagers. Le châssis est destiné à accueillir les trains roulants. Il permet de supporter et de transmettre la production des efforts de freinage. Dans cette partie, nous décrirons le châssis ainsi que l’ensemble des éléments intervenant dans les deux modes longitudinal et latéral et ceux caractérisant la suspension [4].
• Le châssis
Le châssis (ou la caisse) est le corps principal du véhicule. C’est la structure métallique externe à la fin du montage. Elle contient l’habitacle, le groupe moteur et le système de commande du pilote : pédale, volant, levier de vitesse. Cet ensemble constitue la masse suspendue.
Les mouvements du châssis par rapport au sol, dans les trois directions, se caractérisent par trois translations : l’avance suivant l’axe longitudinal x, le ballant suivant l’axe transversal y et
le pompage suivant l’axe vertical z et les trois rotations : le roulis ϕ, le tangage θ et le lacet ψ. Les paramètres inertiels de la caisse sont généralement représentés par [4] :
– sa masse M
– la position de son centre de gravité G
– les seconds moments d’inertie par rapport à chaque axe x, y, z : Ix, Iy, Iz – les produits d’inertie : Ixy, Ixz, Iyz
Les efforts principaux qui agissent sur la caisse sont les charges verticales, qui se transmettent par l’intermédiaire de la liaison au sol (pneumatique, trains, suspensions, etc.). Elles sont quasiment égales à la charge verticale des pneus. Mais, les efforts transversaux et longitudinaux venant du contact pneu/sol sont aussi à considérer. Les efforts aérodynamiques s’appliquent aussi sur la caisse et lorsque la vitesse longitudinale du véhicule dépasse 90km/h, il devient indispensable de les prendre en compte. Ils proviennent du déplacement relatif du véhicule par rapport à l’atmosphère. Donc, ils sont principalement appliqués dans la direction
7
longitudinale sauf en cas de vent latéral fort. L’influence de la composante verticale de l’effort aérodynamique est aussi importante pour la stabilité du véhicule roulant à grande vitesse.
1.2.2.1 Organes pour le contrôle longitudinal
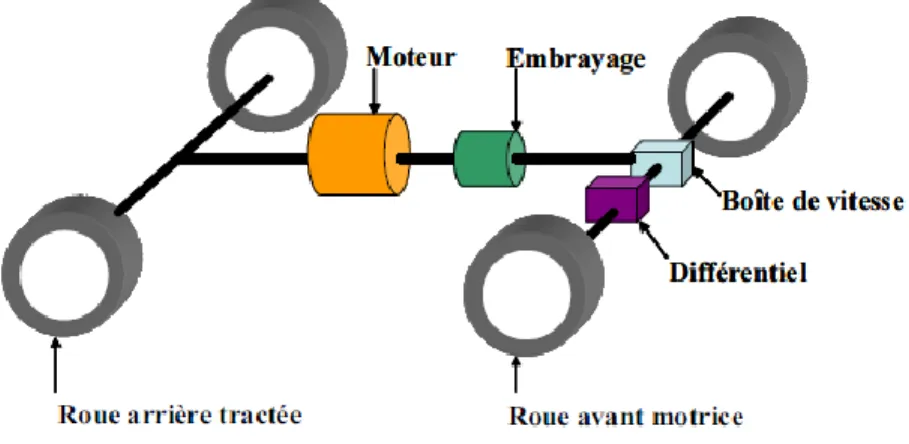
FIG. 1.2 – Organes constitutifs du mode longitudinal.
La figure 1.2 illustre une schématisation par blocs des organes principaux du contrôle longitudinal du véhicule. Les sous-systèmes qui interviennent dans la dynamique longitudinale sont constitués du groupe motorisation, du système de freinage, du groupe embrayage ou convertisseur de couple, de la transmission et des roues et du contact pneu/chaussée.
Le contrôle global de ces éléments permet au véhicule de réaliser des freinages, accélérations, arrêts et démarrages [5].
1.2.2.2 Organes pour le contrôle latéral
8
La dynamique latérale du véhicule est régie par le volant, la colonne de direction, les roues directrices et le contact pneu/chaussée comme le montre la figure 1.3. Ces éléments permettent au véhicule de se déplacer latéralement par action du conducteur sur le volant, d’évoluer dans un virage et d’effectuer des changements de voie. Dans le cadre de l’application, un moteur à courant continu est disposé sur la colonne de direction pour assister le conducteur dans ses manœuvres [5].
• La suspension
Le mécanisme de suspension est composé des éléments suivants : ressort, amortisseur, barre anti-roulis ainsi que les différents organes géométriques et structurels assurant la liaison verticale entre la roue et le châssis. Les véhicules automobiles sont équipés de ce dispositif afin d’isoler la structure principale du véhicule par rapport aux chocs et aux sollicitations générées par les irrégularités de la chaussée. En effet, la suspension doit agir comme un filtre pour éliminer les fréquences de vibrations indésirables et assurer la bonne tenue de route et le confort des passagers. Quant aux amortisseurs, ils servent à amortir les oscillations, les mécanismes de suspension les plus répandus sont conçus pour permettre une configuration à roues indépendantes (exemple de suspension de type McPherson, (voir figure 1.4). Toutefois, l’utilisation des barres anti-roulis créent un lien et une interdépendance des roues du même essieu. Cette interdépendance est uniquement dans le sens vertical des roues.
9
1.3 Principe de base de contrôle de véhicule autonome
Le contrôle du véhicule consiste à manœuvrer le véhicule utilisant les actionneurs tels que le volant, le frein et l’accélérateur pour suivre la trajectoire de référence. Une conduite autonome peut être divisée en trois étapes : la perception de l’environnement, la planification de trajectoires et le contrôle du véhicule [6].
• La perception de l’environnement consiste à détecter la chaussée, les voies, les obstacles fixes et mobiles, etc. Le système de vision composée des capteurs tels que, caméra, lidar, radars et GPS, est couramment utilisé pour atteindre cet objectif.
La perception permet de fournir une carte dynamique de l’environnement proche du véhicule. La localisation permet au véhicule de se repérer dans un repère global, ce qui permet trait de définir les itinéraires possibles de navigation pour atteindre l’objectif fixé.
• La génération de trajectoire consiste à calculer une trajectoire de référence, qui évite les obstacles et respecte plusieurs autres critères ; comme le confort, la sécurité des passagers et le code de la route.
• Le contrôle du véhicule consiste à manœuvrer le véhicule utilisant les actionneurs tels que le volant, le frein et l’accélérateur pour suivre la trajectoire de référence. Cette étape peut être subdivisée en deux tâches : le contrôle longitudinal et le contrôle latéral.
1.3.1 Modèle non linéaire de la dynamique latéral d’un véhicule
Le problème de suivi de trajectoire dans le domaine de la robotique mobile est largement traité. Les solutions proposées dans ce domaine sont toutefois difficilement transposables au contexte du véhicule automobile. En effet, la complexité du modèle dynamique du véhicule et de l’environnement, et des situations de roulage (vitesse élevée) rendent difficile cette transposition. Le contrôle latéral d’un véhicule autonome consiste à imposer au véhicule de suivre automatiquement la trajectoire de référence en agissant sur l’angle de braquage. Il est étudié depuis les années 1950. C’est un domaine de recherche très actif. Compte tenu de la non linéarité du système, des incertitudes paramétriques et des perturbations rencontrées dans les applications automobiles, un des principaux enjeux aujourd’hui est de concevoir des lois de commande robustes capables de tenir compte de ces impératifs. Le contrôleur doit donc être
10
performant malgré les perturbations, les incertitudes paramétriques, l’effet du vent, le changement d’adhérence de la route, etc. L’élaboration des stratégies de commande est effectuée sur les bases d’un modèle [6].
En ce qui concerne le contrôle latéral, le modèle bicyclette dynamique nous semble le plus approprié pour notre application de conduite automatique à grande vitesse. C’est un modèle à la base non linéaire et variant dans le temps.
1.4 Equations de la dynamique du mode latéral d’un véhicule
Dans cette section, l’objectif est d’établir les équations de la dynamique du mode transversal d’un véhicule dont les seuls mouvements envisagés sont la translation, le roulis et le lacet. On supposera par la suite que le véhicule n’effectue pas de mouvement de tangage. Ce mode concerne la dynamique longitudinale. Il est en effet, engendré par les sollicitations d’accélération et de freinage.
1.4.1 Notations et repères
Les expressions des matrices de changement de repères sont développées. Elles permettent de passer respectivement du repère absolu au repère lié au véhicule, puis à celui lié à la caisse. Les repères utilisés sont les suivants [5] :
• a
R est le repère absolu.
• v
R est le repère lié au véhicule.
• c
R est le repère lié à la caisse du véhicule.
Les deux principes de la dynamique sont développés dans le dernier repèreR . c
• Passage de a
R à R v
Le repère absolu R est supposé galiléen. On suppose qu’à l’origine le repère absolu et celui a
lié au véhicule sont confondus. Pour passer de R à a R , il faut effectuer successivement une v
translation de vecteur r o puis une rotation d’angle a v selon l’axe v z comme le montre la figure 1.5. cos( ) sin( ) sin( ) cos( ) v a a v a a v a x x y y x y z z = + = − + = 1.1
( )
11
On note R la matrice de passage de R à a R . Elle a pour expression : v
cos( ) sin( ) 0 sin( ) cos( ) 0 0 0 1 R = − 1.2
( )
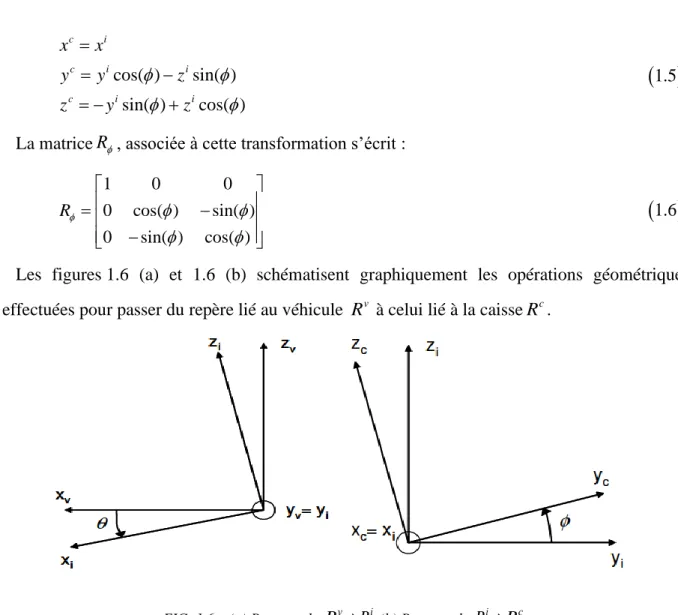
FIG. 1.5 – Passage de Ra à Rv. • Passage de v R à R cLa modélisation d’un véhicule, avec des suspensions, confère à la caisse les types de mouvements que sont le roulis et le tangage. Tout d’abord le mouvement de tangage est une rotation d’angle θ autour de l’axe v
y qui amène dans un repère intermédiaireR . Les i
coordonnées des vecteurs de ce repère en fonction de celles dans R sont : v
cos( ) sin( ) sin( ) cos( ) i v v i v i v v x x z y y z x z = − = = +
( )
1.3 La matrice exprimant cette rotation, R s’écrit :cos( ) 0 sin( ) 0 1 0 sin( ) 0 cos( ) R − = 1.4
( )
Finalement, le mouvement de roulis est représenté par une rotation d’angle autour de l’axe ix . L’expression des coordonnées des vecteurs dans le repère Rc en fonction de leurs coordonnées dans Riest :
12 cos( ) sin( ) sin( ) cos( ) c i c i i c i i x x y y z z y z = = − = − +
( )
1.5 La matrice R, associée à cette transformation s’écrit :1 0 0 0 cos( ) sin( ) 0 sin( ) cos( ) R = − −
( )
1.6 Les figures 1.6 (a) et 1.6 (b) schématisent graphiquement les opérations géométriques effectuées pour passer du repère lié au véhicule R à celui lié à la caissev R . cFIG. 1.6 – (a) Passage de Rv àRi (b) Passage de Ri àRc.
1.4.2 Equations de la dynamique
Dans ce paragraphe, nous décrivons la modélisation du véhicule en considérant un déplacement de long des axes x, y, ainsi qu’une rotation autour l’axe z.
Les rotations autour de ces trois axes sont respectivement (voir figure 1.7) : – Le roulis est le mouvement longitudinal du véhicule.
– Le tangage est le mouvement latéral du véhicule. – Le lacet est le mouvement vertical du véhicule.
13
FIG.1.7 – Mouvements du véhicule.
Dans ce cas, l’automobile peut être assimilée à un corps solide et les contacts des pneus au sol à des points. Une symétrie par rapport au plan vertical (xOz) et une équir-épartition des charges sont supposées. Pour décrire la cinématique du véhicule, nous employons un modèle à trois degrés de liberté. Le système d’axes cartésien (xOy) est utilisé pour étudier le déplacement du centre de la gravité (CG) du véhicule auquel on associe un système d’axes (x,
y). On définit aussi l’angle de lacet 𝜓 entre les repères Ox et Oy (Fig.1.8) [1].
14
FIG. 1.9 – Dynamique du châssis du véhicule.
Pour déterminer le modèle du véhicule, il faut appliquer le principe fondamental de la dynamique au véhicule dans le repère lié à la caisse (FIG. 1.8) qui s’exprime à partir des deux équations suivantes :
• L’équation des forces :
La somme des forces extérieures appliquées au véhicule est égale à sa masse (supposé constante) multipliée par son accélération.
( . ) ext d F M V dt =
( )
1.7• L’équation des moments :
La somme des moments extérieurs égale à son inertie multipliée par son accélération angulaire. ( . ) ext d M I w dt =
(1.8)À base de ces deux principes fondamentaux de la dynamique du véhicule, les forces généraliséesFx,Fy (forces longitudinales, forces latérales) et le moment de rotation totale
auteur de l’axe Z(Mz) est exprimé par :
x
MX =
F (1.9 )ay
15
z
I =
M (1.9 )cÀ l’aide d’une simple rotation d’un angle autour de l’axeoz, on peut évaluer le vecteur de
la vitesse associé au CG du véhicule :
cos( ) sin( ) 0 sin( ) cos( ) 0 0 0 1 x y X v Y v r − = (1.10) avec : x
v etvy sont les vitesses de véhicule dans le plan ( , )X Y .
r= est la vitesse du lacet.
En dérivant (1.10) par rapport au temps, on obtient les accélérations :
cos( ) sin( ) sin( ) cos( )
x x y y
dX
v v v v
dt = − − − (1.11 )a
sin( ) cos( ) cos( ) sin( )
x x y y dY v v v v dt = + + − (1.11 )b d r dt = (1.11 )c
En tenant compte de (1.9) , dans les équations de (1.11) on obtient :
( ) cos( ) ( ) sin( ) x x y y x F v v r v v r M = − − + (1.12 )a ( ) sin( ) ( ) cos( ) y x y y x F v v r v v r M = − + + (1.12 )b z z M r I = (1.12 )c
En substituant l’équation (1.10) dans (1.12), on obtient les expressions des accélérations au centre de gravité du véhicule comme suit :
cos( ) sin( ) 0 sin( ) cos( ) 0 0 0 1 x y y x X v v r Y v v r r − − = + (1.13)
16 où :
(vx−v ry ),(vy+v rx ) sont les accélérations du véhicule dans le plan ( , )X Y .
rest l’accélération angulaire.
( x y ) x M v −v r =
F (1.14 )a ( y x ) y M v +v r =
F (1.14 )b z z I r =
M (1.14 )cLe mouvement longitudinal peut s’écrire comme suit :
( x y ) ( xfl xfr) cos( ) ( yfl yfr)sin( ) xrr xrf
M v −v r = F +F − F +F +F +F (1.15 )a
Le mouvement latéral peut être annoncé selon l’équation suivante : ( y x ) ( xfl xfr)sin( ) ( yfl yfr) cos( ) yrl yrr
M v +v r = F +F + F +F +F +F + f (1.15 )b
Le mouvement du lacet est donné par :
( sin( ) cos( )) ( ) cos( )
2 ( ) 2 z xf yf yr xfl xfr xrl xrr d I r a F F bF F F d F F l f = + − + + + + + (1.15 )c avec :
angle de braquage des roues directrices. x
F Les forces longitudinales. y
F Les forces latérales.
∗∗𝑓𝑙 désignation : avant gauche ∗∗𝑓𝑟 désignation : avant droite ∗∗𝑟𝑟 désignation : arrière droite ∗∗𝑟𝑙 désignation : arrière gauche
Les mouvements décrits par (1.15) peuvent être simplifiés pour obtenir le modèle bicyclette classique du mode latéral, en faisant les hypothèses que la vitesse longitudinale est constante et que les mouvements de rotation en roulis et en tangage sont négligés.
17
FIG.1.10–Modèle de bicyclette.
1.4.3 Modèle dérive-lacet (Bicyclette) :
Dans cette section, nous présentons le modèle de bicyclette du véhicule.
1.4.3.1 Structure et hypothèses de modélisation :
La modélisation nominale du comportement dynamique du véhicule doit prendre en compte la géométrie, la cinématique et la dynamique des liaisons. Pour cela, nous admettons un certain nombre d’hypothèses pour réduire la complexité tout en garantissant un certain degré de réalisme et d’efficacité de la modélisation [1].
• La vitesse longitudinale est constante ( ( )x t =vx =cst).
• Pas de mouvement de roulis ni de tangage. • L’angle de braquage ( ) est faible.
• L’angle de lacet entre le véhicule et la chaussée est faible.
Les hypothèses ci-dessus nous permettent d’effectuer les simplifications suivantes : cos( ) 1, sin( ) = =0,p= (0 p : vitesse de roulis)
, xfl xfr xf xrl xrr xr F =F =F F =F =F , l r yf yf yf yrl yrr yr F =F =F F =F =F
18
Des deux équations (1.15 )b , (1.15 )c , on peut déduire les équations simplifiées de la
dynamique suivante :
• Équation du mouvement latéral :
( y x ) ( yfl yfr) ( yfl yfr) 2 yf 2 yr
M v +v r = F +F + F +F +f = F + F + f (1.16 )a
• Équation du mouvement du lacet :
2 2
z yf yr
I r= aF − bF +l f (1.16 )b
Étudions également la stabilité dans une approche de petites perturbations par rapport à un mouvement à vitesse donnée. Dans ce cadre, il est légitime de faire l’hypothèse que la dérive du véhicule reste petite 𝛽∈ [0°, 15°].
Cela revient à admettre que l’on a une évolution normale sans dérapage important. Il vient alors : cos x v =V V (1.17 )a sin y x v =V V v (1.17 )b
L’angle de braquage 𝛿 est également considéré comme faible, de sorte que cos 𝛿 ≈ 1 et sin 𝛿 ≈ 𝛿.
FIG.1.11 – Vecteurs vitesses et angles sous les roues du véhicule.
Soit 𝛿 l’angle de braquage des roues directrices, 𝛼𝑓 et 𝛼𝑟 sont définis comme étant les angles entre la direction géométrique de la roue et la direction du vecteur vitesse au point de contact de la roue).
19
La compatibilité entre la vitesse et les angles de dérive s’écrit :
tan( f) y x ar v v − = + (1.18 )a tan( r) y x br v v = + (1.18 )b
Si les angles de dérive sous les roues restent petits, on peut écrire :
( y) f x ar v v − − + (1.19 )a ( r y) r x l r v v − − (1.19 )b
En utilisant la définition de l’angle de dérive globale du véhicule au centre de gravité :
𝛽≃𝑣𝑦/𝑣𝑥 (1.20)
En tenant compte du fait que 𝑣𝑥 = 𝑉 reste constante, il vient :
( ) f x ar v − − − (1.21 )a ( ) r x br v − − (1.21 )b
Pour de faibles angles de dérive, la force latérale 𝐹𝑦∗ peut s’écrire en fonction du coefficient de raideur d’envisage des essieux 𝐶𝛼∗ :
yf f f
F = −C (1.22 )a
yr r r
F = −C (1.22 )b
Des deux équations (1.16) et (1.22) , on déduire les équations :
( ) 2 ( ) ( ) 2 ( ) ( ) y x f r x x z f r x x ar br M v v r C C f v v ar br I r aC C l f v v + = − − + − + = − − − − + (1.23)
(
)
2 2 2 ( ) 2 2 2( ) 2( ) 2 r f f y x f r x x z r f r f f bC aC C M v v r C C r f v v I r bC aC b C a C r aC l f − + = − + + + + = − − + + + (1.24)20
(
)
2 2 2 2 2 1 (2 1) 2( ) 2( ) 2 f r r f f x x x x r f r f f z z x z z C C bC aC C r f Mv Mv Mv Mv bC aC b C a C aC l r r f I I v I I − + − = + − + + − + = − + + (1.25) 1.5 ConclusionDans le cadre du suivi de trajectoire et pour plus de simplicité, les recherches ont finalement abouti à aborder la modélisation selon deux domaines : un mode latéral qui tient compte des mouvements transversaux du véhicule sur la chaussée et un mode longitudinal gérant la dynamique du véhicule relative au régime moteur (accélération et freinage).
Dans ce chapitre, nous avons présenté les éléments nécessaires à la modélisation et le contrôle latéral d’un véhicule automobile. Ensuite, un véhicule complet a été modélisé. Sous certaines hypothèses simplificatrices, nous avons fourni un modèle simple qui, par la suite, sera utilisé pour la synthèse des contrôleurs dans les chapitres qui suivent.
21
2.1 Introduction
Dans le chapitre précédent, nous avons donné une représentation mathématique reproduisant la dynamique latérale du véhicule. Dans le but de concevoir une commande assurant la poursuite d’une trajectoire de référence, un modèle complet de contrôle de trajectoire est proposé dans ce chapitre. Dans ce modèle, les variables d'état sont en termes d'erreur de position et d'orientation par rapport à la route. Par la suite, l’approche multimodèle et en particulier la classe de multimodèle à états unique dit les modèles de Takagi- Sugeno est utilisée afin de décrire le comportement dynamique du modèle global obtenu. Les modèle de Takagi-Sugeno constituent une représentation mathématique très intéressante des systèmes non linéaires car, ils permettent de représenter tout système non linéaire, quelle que soit sa complexité, par une structure simple en s’appuyant sur des modèles linéaires interpolés par des fonctions non linéaires positives ou nulles et bornées. Ces modèles permettent de représenter de manière précise les systèmes non linéaires. Ils ont une structure simple présentant des propriétés intéressantes les rendant facilement exploitables du point de vue mathématique et permettant l’extension de certains résultats du domaine linéaire aux systèmes non linéaires [7].
Dans ce chapitre, nous présentons la description multimodèle de la dynamique du véhicule. Nous commençons tout abord par la représentation d’état du modèle bicyclette et le modèle de « positionnement du véhicule sur la voie ». Ensuite, nous donnons les différentes techniques d’obtention d’un multimodèle. On terminera par la représentation du modèle de contrôle de véhicule par l’approche multimodèle en temps continu et discret.
2.2 Représentation d’état du modèle bicyclette
A partir de l’équation 1.25
(
)
(voir chapitre 1) qui représente le modèle non linéaire du véhicule et en considérant que fw comme une entrée perturbatrice ( ( )w t = fw) et comme une entrée de commande, la dynamique latérale du véhicule est donnée par la représentation d’état suivante :(
)
2 2 2 2 2 1 (2 1) 2 2( ) 2( ) f r r f f x x x x f r f r f z z z z x C C bC aC C Mv Mv Mv Mv f r aC l r bC aC b C a C I I I I v − + − − = + + − + − 2.1( )
22 la route.
Dans la section suivante, nous fournissons le modèle complet de contrôle de trajectoire du véhicule.
2.3 Positionnement des véhicules routiers sur la voie
Lorsque l'objectif est de développer un système de commande pour le suivi de la trajectoire, il est utile d'utiliser un modèle dynamique dans lequel les variables d'état sont en termes d'erreur de position et d'orientation par rapport à la route [10].
Pour décrire le mouvement du véhicule par rapport à la route, un système de vision est chargé de fournir les informations sur la position du véhicule et la géométrie de la route. Ce système fournit deux mesures (figure 2.1) [9] :
• : L’erreur sur l’angle de cap, à savoir la différence entre le cap de véhicule L
et l’angle de la route . des• yL: l’écart latéral du véhicule par rapport au centre de voie, mesuré à une distance ls en avant du véhicule.
FIG.2.1–Positionnement du véhicule sur la voie.
Selon [10], les équations d’état des erreurs peuvent être décrites par :
L r vx r = −
L x s L x
23 r
est la courbure de la route au centre de gravité CG.r =1 /R.Où R est le rayon de la
route au centre de gravité du véhicule. Donc, le « positionnement du véhicule sur la voie » peut être donné par le modèle suivant :
0 1 0 0 0 0 L x r x s x L L L r v v l v y y − = +
( )
2.22.4 Modèle de control du véhicule
À partir du modèle « bicyclette »
( )
2.1 et le modèle de contrôle de trajectoire (2.2), le modèle route-véhicule utilisé à des fins de contrôle peut être exprimé comme suit [10] :(Cas continu)x t( )=A x tv ( )+B u tvu ( )+Bvw( )t
( )
2.3(Cas discret)x k( + =1) Ax k( )+B u ku ( )+Bw( )k
( )
2.4où x=
r L yL
T est le vecteur d’états, =
f r
T est le vecteur de perturbation, et l'entrée de commande est l'angle de braquage u= Les matrices du système sont données . par : Cas continu : 11 12 21 22 0 0 0 0 0 1 0 0 0 v x s x a a a a A v l v = 1 2 0 0 vu b b B = 1 2 0 0 0 0 0 v x e e B v = − ( )
2.5 Cas discret :la version à temps discret du système à temps continu est donnée par [10] : en utilisant l’approximation d’Euler ;
( 1) ( ) ( ) x k x k x t Te + − = On obtient :
24 11 12 1 1 21 22 2 2 1 0 0 0 1 0 0 0 , , . 0 1 0 0 0 1 0 0 0 e e e e e e e e e v u e vu e v e e x e x e s e x T a T a T b T e T a T a T b T e A I T A B T B B T B T T v T v T l T v + + = + = = = = = −
( )
2.6 avec : 0.01 e T =(
)
11 2 f r x C C a Mv − + = , 12 2 2( ) 1 r f x bC aC a Mv − = − , 21 2( r f) z bC aC a I − = , 2 2 22 2( r f) z x b C a C a I v + = − . 1 2 f x C b Mv = , 2 2 f z aC b I = , 1 1 x e Mv = , 2 z l e I = .et Te est le pas de discrétisation.
Si en tenant compte la variation de la vitesse, le système décrit par (2.5) (cas continu) ou bien sa version discrète (2.6) est non linéaire. Dans ce qui suit, on va décrire ce système par la représentation multimodèle et plus précisément les modèles de Takagi-Sugeno. Cette description nous a permet par la suite (chapitre 3 et 4) de la mise en œuvre de lois de commande garantissant un bon suivi de la trajectoire de référence pour le véhicule autonome.
2.5 Présentation des modèles flous de type Takagi-Sugeno (T-S)
Les modèles flous de type Takagi-Sugeno sont représentés dans l’espace d’état par des règles floues de type « Si –Alors » [11]. Les parties prémisses de ces règles floues sont représentatives de l’univers du discours sur lequel le modèle flou est valide et les parties conclusions correspondent peut-être à des modèles locaux invariants dans le temps (représentations d’état linéaires). A titre d’exemple, ce type de modèle flou s’avère utile pour la représentation des systèmes non linéaires tels que les systèmes électriques, chaotiques, etc. La ème
i règle floue d’un modèle T-S continu (en temps continu) (MFC) s’écrit alors sous la
forme [12] : i
R : SIz t1( ) est F z t1i( ( ))1 ET
2( )
25 ALORS ( ) ( ) ( ) ( ) ( ) ( ) i i i i i i x t A x t B u t y t C x t D u t = + = + (2.7)
où R représente la i ème
i règle floue, i =1,..., r F z tji( j( )) pour j =1,..., r sont les sous-ensembles
flous, r le nombre de règles floues, z tj( )sont les variables de prémisses qui dépendent de l’entrée et/ou de l’état du système, x t ( ) n, y t ( ) q et u t ( ) mreprésentent respectivement le vecteur d’état, le vecteur de sortie et le vecteur de commande.
, , ,
n n n m q n q m
A B C D sont des matrices décrivant la dynamique du système. Notons qu’une discrétisation de tels modèles est possible par une représentation d’état en temps discret (MFD). Le temps t est alors congru à k et le modèle est alors décrit par les équations de récurrence suivantes :
i
R : SIz k1( ) est F z k1i( ( ))1 ETz k2( ) est F z k2i( 2( ))……ET zp( )k est i( ( ))
p p F z k ALORS ( 1) ( ) ( ) ( ) ( ) ( ) i i i i i i x k A x k B u k y k C x k D u k + = + = + (2.8)
A chaque règle R est attribuée un poids noté i ( ( )) ( ( ))
p i i j j j w z k F z t = =
. Ce poids dépend du degré d’appartenance des variables de prémisses z tj( )aux sous-ensembles flous F z tji( j( ))et du connecteur « ET » reliant les prémisses choisies telles que :( ( )) ( ( )) p i i j j j w z k F z t = =
, pour i =1,..., r (2.9) ( ( )) i j jF z t représente la valeur de la fonction d’appartenance z tj( ) à l’ensemble flou i
j F . On pose : 1 ( ( )) ( ( )) ( ( )) i i r i i w z t h z t w z t = =
(2.10) ( ( )) ih z t représente donc la fonction d’activation de la ième règle du modèle flou. Pour i =1,..., r,
26 1 ( ( )) 1 i i h z t = =
Et h z ti( ( ))0. (2.11) Finalement, la défuzzification du modèle flou permet d’obtenir la représentation d’état d’un modèle non linéaire par l’interconnexion de modèles locaux invariants dans le temps par des fonctions d’activation non linéaires. On obtient alors :1 1 ( ) ( ( )( ( ) ( )) ( ) ( ( )( ( ) ( )) r i i i i r i i i i x t h z t A x t B u t y t h z t C x t D u t = = = + = +
(2.12)Notons que de la même façon, pour un modèle flou discrétisé (MFD) on a :
1 1 ( 1) ( ( )( ( ) ( )) ( ) ( ( )( ( ) ( )) r i i i i i r i i i i i x k h z k A x k B u k y k h z k C x k D u k = = + = + = +
(2.13)Dans le cadre de la modélisation par modèles Takagi-Sugeno, on rencontre souvent les termes : variables de prémisses, fonctions d’appartenance ou d’activation et règles floues. Ceux-ci sont précisés par les définitions suivantes [15] :
• Règles floues : dénombrées par r dans la représentation d’état d’un modèle flou T-S. Elles correspondent au nombre de modèles locaux LTI.
• Variables de prémisses : notées z t ( ) j grandeurs connues et accessibles permettent l’évaluation des fonctions d’appartenance. Elles dépendent éventuellement des variables d’état mesurables et/ou de la commande.
• Fonctions d’appartenance : notées h z ti( ( )) : j ⎯⎯→ , ce sont des fonctions non
linéaires dépendant des variables de prémisses associées aux différentes zones de fonctionnement. Elles permettent de traduire la contribution d’un modèle local LTI correspondant à un point de fonctionnement par rapport à la zone de fonctionnement du système. Ainsi, elles assurent le passage progressif d’un modèle local LTI aux modèles locaux voisins.
27
Dans la littérature, trois approches sont couramment décrites pour l’obtention d’un modèle Takagi-Sugeno :
2.6.1 Par identification
En représentant un système non linéaire sous forme d’un modèle T-S, le problème d’identification des systèmes non linéaires est réduit à l’identification des sous-systèmes définis par des modèles locaux linéaires et des fonctions d’activation. Les méthodes d’optimisation numériques sont alors utilisées pour estimer ces paramètres.
Pour l’estimation des paramètres, plusieurs méthodes d’optimisation numériques peuvent être utilisées, selon les informations disponibles à priori. Elles sont généralement basées sur la minimisation de la fonction d’écart entre la sortie estimée du multi-modèles y(t) et la sortie mesurée du système ym( )t [13].
2.6.2 Par linéarisation
Dans ce cas, on dispose de la forme analytique du modèle non linéaire du processus physique qu’on linéarise autour de différents points de fonctionnement judicieusement choisis
[4].
Par la suite, nous représenterons le système non linéaire (2.3) par un modèle T-S, composé de plusieurs modèles locaux linéaires ou affines obtenus en linéarisant le système non linéaire autour d’un point de fonctionnement arbitraire ( ,x ui i)RnRm[14].
1 1 ( ) ( ( ))( ( ) ( ) ) ( ) ( ( ))( ( ) ( ) ) r m i i m i i i r m i i m i i i x t h z t A x t B u t D y t h z t C x t E u t N = = = + + = + +
(2.14) ( , ) m i i x x u u F x u A x = = = , ( , ) m i i x x u u F x u B u = = = ,Di =F x u( , )i i −A xi −B ui ( , ) m i i x x u u F x u C x = = = , ( , ) m i i x x u u F x u E u = = = ,Ni =G x u( , )i i −C xi −E ui28
modélisation souhaitée, de la complexité du système non linéaire et du choix de la structure des fonctions d’activation. Ces dernières doivent satisfaire les propriétés (2.9) [4].
2.6.3 Par transformation d’un système non linéaire polytopique convexe
Nous proposons d’étudier cette transformation dans le cas générale d’un système non linéaire affine en la commande [10] :
(Cas continu) ( ) ( ( )) ( ( )) ( ) ( ) ( ( )) ( ( )) ( ) x t f x t B x t u t y t g x t D x t u t = + = + (2.15) (Cas discret) ( 1) ( ( )) ( ( )) ( ) ( ) ( ( )) ( ( )) ( ) x k f x k B x k u k y k g x k D x k u k + = + = + (2.16) avec : x(.) p, (.)u m, (.)y l, ( (.))f x p, ( (.))g x l, ( (.))B x p m. etD x( (.)) l m. .
Cette méthode est basée sur une transformation polytopique convexe de fonctions scalaires origines de la non linéarité. L’avantage de cette méthode est de ne pas engendrer d’erreur d’approximation et de minimiser le nombre de modèles locaux.
Lemme 2.1
Soit f x( ) une fonction bornée de
a b →, pour tout x
a b, avec ( , )a b +2. Alors, il existe deux fonctions :
2 (.) : , 0,1 , ( ) ( ( )) i i F a b i I x t F x t → → (2.17) avec F x t1( ( ))+F2( ( )) 1x t = et deux scalaires et tels que1 2
( ( )) ( ( )) ( ( ))
f x t =F x t +F x t (2.18) Bien évidements cette décomposition n’est pas unique. Une décomposition évidente de ( ( ))h x t
est de considérer sur
a b,( ( )) h x t (2.19) avec , , min ( ( )), max ( ( )). x a b f x t x a b f x t − − = = (2.20)
29 1 ( ( )) 2 ( ( )) ( ( )) f x t , ( ( )) f x t F x t F x t − − = = − − (2.21)
Cette méthode de décomposition sera utilisée par la suite. En revenants aux définitions (2.15). sous l’hypothèse que f x t et ( ( ))( ( )) g x t sont continués et bornées sur U p avec
(0) 0
f = et (0) 0g = . Ces fonctions peuvent être réécrites sous la forme suivante :
2 2 1 1 ( ( )) i( ( ))( i ( )), ( ( )) i( ( ))( i ( )) i i f x t h z t A x t g x t h z t C x t = = =
=
(2.22) Le modèle devient : 2 1 2 1 ( ) ( ( ))( ( ) ( )) ( _ ) ( ) ( ( ))( ( ) ( )) i i i i i i x t h z t A x t B u t Cas continue y t h z t C x t D u t = + = +
(2.23) 2 1 2 1 ( 1) ( ( ))( ( ) ( )) ( _ ) ( ) ( ( ))( ( ) ( )) i i i i i i x k h z k A x k B u k Cas discret y k h z k C x k D u k + = + = +
(2.24)Cette méthode est basée sur la bornitude des fonctions continues. L’avantage de cette méthode est de ne pas engendrer d’erreur d’approximation et de minimiser le nombre des modèles locaux [10].
Le nombre de modèles locaux n issue de la transformation se trouve par conséquent dépend de nombre des non linéarités des variables d’états.
2.7 Représentation du modèle de control de véhicule par un modèle de Takagi-Sugeno
On note que les matrices A B et v, vu Bv ( ,A B et Bu ) dépend de la vitesse du véhicule qui est mesurée et bornée.
, x
v 1/vx, 2
1/vx,vmin vx vmax
(
2.25)
On considère :vmin =8
m s/
et vmax =30
m s/
.Le nombre de modèles locaux sera 23 = modèles dont les matrices sont données par : 8 8 vx 30, 1 1 1,
30 vx 8
1 12 1 .
900 vx 64
30 1 x 1, m v M 2 1 2, x m M v 3 12 3. x m M v