HAL Id: tel-01337136
https://tel.archives-ouvertes.fr/tel-01337136v2
Submitted on 2 Jun 2017HAL is a multi-disciplinary open access archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
approche hydroacoustique
Eve Tsang-Hin-Sun
To cite this version:
Eve Tsang-Hin-Sun. Dynamique spatiale et temporelle de dorsales à taux d’expansion contrastés dans l’océan Indien par une approche hydroacoustique. Sciences de la Terre. Université de Bretagne occidentale - Brest, 2016. Français. �NNT : 2016BRES0014�. �tel-01337136v2�
Table des matières
Abstract 9
Résumé 11
Remerciements 13
Introduction 15
1 Les sons dans l’océan 19
1.1 Nature et propagation des sons dans le milieu océanique . . . 19
1.1.1 Propagation du son dans l’océan . . . 19
1.1.2 Notion de bruit ambiant . . . 23
1.2 Les ondes T . . . 30
1.2.1 Définition . . . 30
1.2.2 Source et propagation des ondes T . . . 31
1.2.3 Ondes T et paramètres de la source sismique . . . 35
1.2.4 Traitement des enregistrements d’ondes T . . . 38
1.3 Enregistrement des sons : hydrophones et réseaux . . . 42
1.3.1 La surveillance hydroacoustique dans les océans . . . 42
1.3.2 Le réseau OHASISIBIO . . . 43
1.3.3 Technologie et mise en place . . . 46
1.3.4 Limites et incertitudes de la méthode . . . 49
2 Sismicité et processus d’accrétion des dorsales océaniques 59
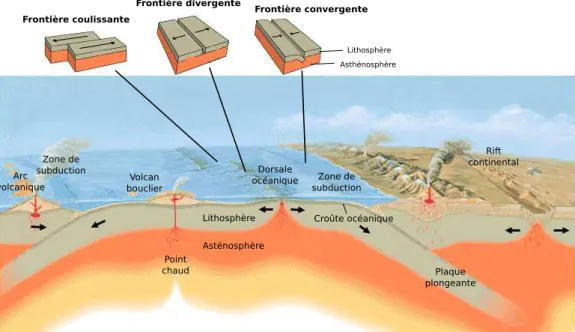
2.1 Tectonique et déformation associés aux dorsales océaniques . . . 59
2.1.1 Des frontières de plaque divergentes . . . 59
2.1.2 Séismes et dorsales océaniques . . . 63
2.2 Méthodes d’analyse de la sismicité des dorsales . . . 67
2.2.1 Limites de détection et complétude . . . 67
2.2.2 Sismicité sporadique et taux de sismicité . . . 69
2.2.3 Agrégation de la sismicité . . . 70
2.2.4 Méthode de recherche des clusters . . . 71
2.3 Hydroacoustique et sismicité des dorsales . . . 73
2.3.1 Dorsales à taux d’expansion rapide . . . 73
2.3.2 Dorsales à taux d’expansion intermédiaire . . . 77
2.3.3 Dorsales à taux d’expansion lent . . . 85
2.3.4 Dorsales à taux d’expansion ultra-lent . . . 90
2.4 Résumé et implications pour les dorsales de l’océan Indien . . . 99
2.4.1 Taux et distribution de la sismicité . . . 99
2.4.2 Processus magmatiques . . . 102
2.4.3 Et dans l’océan Indien ? . . . 104
3 Sismicité hydroacoustique dans l’océan Indien 107 3.1 Catalogue de sismicité dans l’océan Indien . . . 107
3.1.1 Le catalogue DEFLO 2007 . . . 107
3.1.2 Le catalogue OHASISBIO 2012 . . . 111
3.1.3 Catalogues de sismicité terrestres . . . 118
3.2 Contraintes sur la source sismique . . . 120
3.2.1 Catalogues globaux vs hydroacoustiques . . . 120
3.2.2 DEFLO vs OHASISBIO . . . 127
3.3 Incertitudes de localisation des catalogues hydroacoustiques . . . 128
3.3.2 Géométries du réseau pour la dorsale Sud-Ouest Indienne . . . 130
3.3.3 Géométries du réseau pour la dorsale Sud-Est Indienne . . . 134
3.4 Conclusion . . . 137
4 Sismicité et accrétion océanique dans l’océan Indien 139 4.1 Sismicité des dorsales de l’océan Indien . . . 140
4.1.1 Analyse comparée des dorsales Sud-Ouest et Sud-Est indiennes . . . 140
4.1.2 Résultats complémentaires . . . 182
4.2 Essaims et séquences sismiques dans l’océan Indien . . . 189
4.2.1 Le Plateau de St-Paul et Amsterdam . . . 189
4.2.2 Zones de fracture . . . 193
4.2.3 Centre de segment . . . 194
4.3 Discussion . . . 194
4.3.1 Apports de l’hydroacoustique . . . 194
4.3.2 Sismicité et déformation des dorsales . . . 197
4.3.3 Interactions dorsale-point chaud . . . 204
4.3.4 Autres événements dans l’océan Indien . . . 205
4.4 Conclusion . . . 207
5 Analyse du niveau de bruit océanique ambiant 211 5.1 Estimation du bruit ambiant océanique . . . 212
5.1.1 Sources sonores et interactions dans l’océan . . . 212
5.1.2 Niveau de son dans les océans . . . 214
5.1.3 Méthodes et données . . . 218
5.2 Bruit ambiant dans l’océan Indien austral, évolution spatiale et temporelle 221 5.2.1 Niveau de son dans l’océan Indien austral . . . 221
5.2.2 Évolution temporelle du niveau de bruit ambiant . . . 231
5.3 Discussion complémentaire . . . 237
5.3.2 Variations spatiales des sources et des niveaux de son . . . 239
5.3.3 Sources cryogéniques . . . 242
5.4 Conclusion . . . 243
Conclusion et perspectives 245 A Détermination des paramètres de la source sismique à partir de la forme de l’onde T 251 A.1 Contexte et motivations . . . 251
A.2 Données et modèles . . . 252
A.2.1 Données de sismicité . . . 252
A.2.2 Méthode et code de calcul . . . 252
A.2.3 Paramètres de calcul . . . 253
A.3 Résultats . . . 256
A.3.1 Les observations de données réelles . . . 256
A.3.2 Données synthétiques . . . 257
A.4 Discussion et perspectives . . . 260
A.4.1 Modélisation . . . 260
A.4.2 Données réelles . . . 261
B Événements acoustiques enregistrés dans l’Océan Indien 263 B.1 Événements tectoniques et magmatiques . . . 263
B.2 Événements cryogéniques . . . 264
B.3 Autres événements . . . 266
B.3.1 Les signaux inconnus . . . 266
B.3.2 Signaux identifiés . . . 267
Bibliographie 269
Volcanic and tectonic events are the main processes involved in the generation of the oceanic crust and responsible for the seismicity associated with seafloor spreading. They are yet poorly detected by land-based seismological networks. Arrays of hydrophones, moored into the SOFAR channel, are capable of recording the seismo-acoustic phase generated by low-magnitude submarine earthquakes, the T waves. They also evidenced eruptive events and revealed new aspects of mid-oceanic tectonics in the Atlantic and Pacific oceans. In the Indian Ocean, there are three mid-oceanic ridges with contrasted spreading rates, the Southwest (ultra-slow, 14mm/y), Central (slow, 35 mm/y) and Sou-theast indian ridges (intermediate, 60 mm/y) ; it is thus the ideal place for examining the relationships between seismicity and spreading rate. To this effect, the OHASISBIO network of hydrophones, deployed from February 2012 and February 2013, detected more than 1400 earthquakes along the three mid-oceanic ridges in the Indian Ocean, which is about five times more events than land-based networks, thus yielding a completeness level of mb = 3.3.
Although the ridges have contrasted spreading rates, their mean seismicity rates are similar, suggesting that there is no direct relationship between seismicity and spreading rates. The along-axis distribution of the seismicity, however, is contrasted and reveals fundamentally different modes of accretion. Along the Southwest Indian Ridge, events are sparse but regularly distributed along the axis, especially east of the Melville frac-ture zone and in good agreement with tectonic extension. On the contrary, along the Central and Southeast indian ridges, the seismicity is well correlated with the
tation. Earthquakes cluster at segment ends and discontinuities whereas segment centres are mostly aseismic, except at hydrothermal sites on the Central Indian Ridge and one active segment on the Southeast Indian Ridge. Two magmatic events were recorded on this segment, suggesting the refilling of a magma reservoir at shallow depth. Overall, segment-scale variations in the seismicity reflect the thermal state of the crust beneath the Central and Southeast Indian ridges whereas larger scale variations reveal changes in the mantle temperature under the Southwest Indian Ridge.
In addition to low-magnitudes earthquakes, whales calls, shipping and cryogenic events contribute to the oceanic ambient noise at low frequencies (< 100 Hz). Shipping is the main sound source to the north dominating, the whole spectrum, while natural sound sources, four species of whales and icebergs, are prevailing to the south. Drifting and calving icebergs, off Antarctica, modulate the ambient noise level in the whole basin, even at sub-tropical latitudes.
Les processus volcaniques et tectoniques sont à l’origine de la création de la croûte océanique et de la sismicité des dorsales. Cette dernière est rarement détectée par les stations sismologiques. Les réseaux d’hydrophones, immergés dans la colonne d’eau océa-nique sont capables d’enregistrer les phases sismo-acoustiques produites par les séismes sous-marins de faible magnitude, les ondes T. Ils ont aussi mis en évidence des phéno-mènes éruptifs et ont permis une meilleure compréhension des événements tectoniques aux dorsales dans l’Atlantique et le Pacifique. Dans l’océan Indien, il y a trois dorsales à taux d’expansion contrastés, les dorsales Sud-Ouest Indienne (ultra-lent, 14 mm/an), Centrale Indienne (lent 35 mm/an) et Sud-Est Indienne (intermédiaire, 60 mm/an) ; c’est donc le lieu idéal pour examiner les relations entre sismicité et taux d’expansion. À cet effet, le réseau OHASISBIO, déployé de février 2012 à février 2013 a permis la détection de plus de 1400 séismes le long de ces trois dorsales, soit cinq fois plus que les stations sismologiques, pour une magnitude de complétude mb = 3.3.
Bien que les dorsales aient des taux d’expansion contrastés, leur taux de sismicité moyen est similaire, montrant qu’il n’y a pas de relation directe entre taux d’expansion et de sismicité. La distribution des séismes le long de l’axe de chaque dorsale est toute-fois contrastée et révèle des modes d’accrétion fondamentalement différents. Le long de la dorsale Sud-Ouest Indienne, la sismicité est peu abondante mais régulièrement distribuée le long de l’axe à l’est de la zone de fracture de Melville, en bon accord avec des processus d’extension tectonique dominants. Au contraire, le long des dorsales Sud-est et Centrale indiennes, la sismicité est bien corrélée avec la segmentation. Les séismes sont
trés aux extrémités des segments et autour des discontinuités ; les centres de segments sont majoritairement asismiques à l’exception des sites hydrothermaux de la dorsale Cen-trale Indienne et d’un segment actif de la dorsale Sud-Est Indienne. Deux événements magmatiques sont enregistrés le long de ce segment, témoignant du probablement ré-approvisionnement en magma d’un réservoir superficiel sous la dorsale. Globalement, les variations de la sismicité à l’échelle du segment reflètent l’état thermique de la croûte sous les dorsales Centrale et Sud-Est Indienne cependant que les variations à grande échelle expriment les différences de température du manteau sous la dorsale Sud-Ouest Indienne. Outre les séismes de faibles magnitudes générés aux dorsales la contribution des voca-lises de baleines, le trafic maritime et les événements cryogéniques forment le bruit ambiant océanique aux basse fréquences (< 100 Hz). Au nord de l’océan Indien le trafic maritime domine le niveau de bruit sur pratiquement tout le spectre (< 80 Hz) tandis qu’au sud les sources de sons dominantes sont naturelles : vocalises de quatre espèces baleines et ice-bergs à la dérive. Ces derniers, localisés au large de l’Antarctique, contribuent à moduler le niveau de bruit ambiant à l’échelle du bassin jusqu’aux latitudes sub-tropicales.
En premier lieu, je remercie chaleureusement mon directeur de thèse, Jean-Yves Royer. Il m’a guidé dans mon travail de recherche et offert l’opportunité inestimable de découvrir les terres australes lors de deux campagnes océanographiques. J’ai également apprécié sa patience et ses relectures et corrections attentives de mes documents, articles, posters ou présentations. J’ai aussi été sensible à ses qualités humaines d’écoute et de compréhension durant ces trois années pas toujours évidentes.
Je remercie également Julie Perrot et Alexey Sukhovich pour leur regard critique sur mon travail et les nombreux conseils qui ont su faire progresser ma recherche.
Un grand merci aussi à Vincent Brandon et Massinissa Benabdellouahed d’avoir joué le rôle de relecteur. J’ai aussi apprécié leur présence et leur bonne humeur quotidienne.
Je souhaite exprimer ma reconnaissance envers tous les membres du laboratoire Do-maines Océaniques et en particulier aux équipes informatique et de gestion pour leur soutien logistique et administratif.
Je suis reconnaissante à Wayne Crawford et Pascal Bernard d’avoir accepté de rap-porter ces travaux, ainsi qu’à Guilhem Barruol, Daniel Sauter et Jacques Deverchère pour leur participation à ce jury de thèse. Leurs critiques et conseils constructifs ont permis d’améliorer ces travaux.
Cette thèse a bénéficié du soutien de la région Bretagne via le Laboratoire d’Excellence LabexMer (bourse ANR-10-LABX-19) ainsi que de l’Université de Bretagne Occidental à Brest.
Enfin, je remercie tous ceux et celles qui m’ont soutenu par leur affection et leur amitié 13
durant ces trois années de thèse, en supportant mes doutes, mes mauvaises humeurs ou e trinquant autour d’un verre ; est-il besoin de les nommer ? Parce qu’ils connaissent mon goût des effusions et des démonstrations sentimentales, ils se reconnaîtront. Je les remercie donc, du fond du cœur, ainsi que ceux que j’oublie, bien malgré moi.
À l’écoute des dorsales océaniques
Les dorsales océaniques sont les frontières extensives des plaques tectoniques et jouent donc un rôle essentiel dans le bilan énergétique global de la terre. Elles forment en effet la plus longue chaîne volcanique ainsi que la plus longue chaîne de montagnes sous-marines. Les processus à l’origine de la création de la croûte océanique sont d’origine tectonique et volcanique et produisent des séismes sous-marins de faible magnitude dans les premiers kilomètres de la lithosphère sous les dorsales. Ces derniers sont cependant peu enregistrés par la stations sismologiques terrestres à cause de leur éloignement et de la forte atténua-tion des ondes sismiques dans l’écorce terrestre. Depuis les années 60, le développement des réseaux sismologiques contribue à améliorer notre connaissance de la sismicité des dorsales. Les premières études de la sismicité des dorsales remontent aux années 70, pa-rallèlement à la théorie de la tectonique des plaques. Les dorsales y sont alors décrites comme pratiquement asismiques, tandis que les failles coulissantes qui décalent les seg-ments de dorsales sont les principales sources de séismes au fond des océans. Depuis les années 90, les méthodes hydroacoustiques ont permis d’améliorer ce modèle.
Outre les ondes de volume P et S, qui se propagent dans la lithosphère, les séismes sous-marins produisent également une phase acoustique, les ondes T, convertie des ondes sismiques à l’interface du plancher océanique. Elles se propagent dans la colonne d’eau océanique et, tirant profit des propriétés acoustiques de cette dernière, peuvent parcourir de grandes distances avec une atténuation faible. Ces propriétés de propagation du son dans les océans sont connues depuis la fin de la Seconde Guerre Mondiale et se sont
vélées utiles pour l’étude du bruit ambiant océanique, auquel participent, entre autres, les vocalises des baleines, la navigation et les séismes. Depuis une vingtaine d’années, les méthodes hydroacoustiques se sont révélées efficaces pour l’observation des dorsales océaniques grâce à l’enregistrement des ondes T par des réseaux d’hydrophones, immergés dans la colonne d’eau océanique. L’hydroacoustique a révolutionné notre compréhension des phénomènes éruptifs aux dorsales et mis en avant l’impact des séismes sous-marins sur les systèmes hydrothermaux tout en améliorant les capacités de détection et de loca-lisation de la sismicité de faible magnitude des dorsales. Elle a, de plus, mis en évidence les propriétés tectoniques des dorsales Médio-Atlantique, Juan de Fuca ou encore Est-Pacifique. Les réseaux de surveillance hydroacoustique se sont ainsi développés dans les océans Pacifique et Atlantique et plus récemment dans l’océan Indien, historiquement moins étudié que les autres.
Sismicité des dorsales dans l’océan Indien
Dans l’océan Indien austral, trois dorsales à taux d’expansion contrastés se rejoignent au point triple de Rodrigues. La dorsales Sud-Ouest Indienne sépare les plaques Antarc-tique et Afrique à une taux ultra-lent de 14 mm/an. La dorsale Centrale Indienne, au nord a un taux d’expansion lent de 35 mm/an en moyenne tandis que la dorsale Sud-Est Indienne, la plus rapide possède un taux d’expansion intermédiaire de 60 mm/an. L’océan Indien austral est donc un lieu unique pour l’étude des relations entre sismicité et taux d’expansion. De décembre 2006 à février 2007, trois hydrophones autonomes ont été dé-ployés dans l’océan Indien austral, entre l’île de la Réunion et le Plateau de St-Paul et Amsterdam, par le Laboratoire Domaines Océaniques (Brest) et le NOAA/PMEL (New-port, Oregon), dans le cadre de l’expérience DEFLO. Les résultats de cette expérimen-tation ont montré qu’il existe une activité sismique de faible magnitude le long des trois dorsales. De plus, l’expérience a aussi révélé la présence de plusieurs espèce de baleines de même qu’une forte concentration d’événements cryogéniques dans la même bande de fré-quence. Afin de poursuivre l’exploration de l’océan Indien austral, le réseau OHASISBIO
(Observatoire Hydroacoustique de la Sismicité et de la Biodiversité) est déployé depuis 2010 sur 5 à 6 sites, profitant des trajets annuels du NO Marion Dufresne vers les terres australes françaises.
Ces travaux de thèse présent les données hydroacoustiques récoltées entre 2012 et 2103 par le réseau OHASISBIO dans l’océan Indien austral. Ils tenteront de répondre aux problématiques suivantes :
• quelles sont les caractéristiques de la sismicité de faible magnitude le long des trois dorsales de l’océan Indien austral ?
• quelles relations existent entre sismicité et taux d’expansion océanique ?
• quelle est la nature des processus d’accrétion actifs le long de ces trois dorsales ? Outre la sismicité des dorsales, les hydrophones enregistrent les vocalises de plusieurs espèces de baleines ainsi que de nombreux événements cryogéniques en provenance d’ice-bergs à la dérive dans l’océan austral. Tous ces sons, tout comme ceux liés à la navigation, participent à former le bruit ambiant océanique. Son estimation est devenue un enjeu majeur dans les océans de l’hémisphère Nord. Cette thèse tentera également d’estimer le niveau de son dans l’océan Indien ainsi que la distribution et l’évolution spatio-temporelle des principales sources de bruit.
Structure de la thèse
L’essentiel de ces travaux porte sur la sismicité des dorsales et les apports de l’hy-droacoustique dans l’océan Indien. Le premier chapitre développe le concept d’écoute sous-marine des océans grâce aux réseaux d’hydrophones. Les principales sources de bruit y sont présentées, et en particulier les ondes T, phases sismo-acoustiques produites par les séismes sous-marins. L’enregistrement et le traitement de ces dernières sont également détaillés, de même que les incertitudes de localisation liées à la méthode.
Le second chapitre est consacré à la sismicité des dorsales et se base principalement sur les résultats présentés dans la littérature. Les dorsales sont classées en quatre catégories
selon leur taux d’expansion, rapide, intermédiaire, lent et ultra-lent. Les principales carac-téristiques de chaque type de dorsale sont examinées afin d’établir de possibles relations entre sismicité, processus d’accrétion et taux d’expansion.
La troisième partie de cette thèse est consacrée à l’étude des différents catalogues de sismicité, hydroacoustique et télésismique, disponibles pour l’océan Indien austral. Après une présentation des catalogues et de leurs incertitudes, des comparaisons entre données hydroacoustiques et sismologiques sont effectuées afin de mieux comprendre les relations entre sources sismique et acoustique. Les incertitudes de localisation propres au réseau OHASISBIO font l’objet d’une analyse plus poussée afin de mieux contraindre les résultats sur la sismicité des dorsales.
Le quatrième chapitre présente la distribution spatiale et temporelle de la sismicité le long des trois dorsales de l’océan Indien. La distribution de la sismicité est analysée le long de l’axe de chaque dorsale pour deux années (2007 et 2012) de surveillance hy-droacoustique et vingt ans de surveillance sismologique. Le taux de sismicité ainsi que la présence d’essaims magmatiques ou de séquences sismiques sont examinés. À la suite des observations, nous tenterons d’associer la sismicité recensée aux structures géologiques connues. Ces résultats sont discutés en tenant compte des incertitudes de localisation et du contexte géodynamique des dorsales de l’océan Indien.
Enfin, la cinquième partie de cette thèse est consacrée à l’estimation du niveau de bruit ambiant dans l’océan Indien austral. Les différentes sources de bruits sont identifiées et leur évolution spatiale et temporelle est analysée. Ces résultats sont discutés et comparés aux autres océans.
Les sons dans l’océan
1.1 Nature et propagation des sons dans le milieu
océanique
1.1.1 Propagation du son dans l’océan
L’océan est un environnement sonore riche, dont les sources de bruit sont diverses et interagissent entre elles. Nonobstant, comprendre les différentes sources de son dans l’océan, leur variabilité et leurs possibles interférences demande, en premier lieu, d’en saisir la nature.
Ondes acoustiques en milieu fluide
Du point de vue de la physique, le son est le produit d’une onde acoustique et consiste donc en un phénomène vibratoire qui se propage dans l’espace. L’onde acoustique pro-voque une perturbation mécanique des particules du milieu et modifie ainsi les caractéris-tiques spatiales de ce dernier. Comme tout phénomène propagatif, les ondes acouscaractéris-tiques peuvent être associées à une grandeur physique qui les caractérise, la vitesse de propa-gation ou célérité du son. Cette dernière dépend bien évidemment des caractéristiques mécaniques du milieu. Ainsi, dans un milieu liquide, la célérité de l’onde acoustique est
donnée par :
c= √µρ1 (1.1)
où c est la célérité (m/s), µ est le coefficient de compressibilité adiabatique (m2
/N) et
ρ la masse volumique (kg/m3
), paramètres dépendants tous deux du type de matériau.
La célérité des ondes acoustiques dans l’eau de mer vaut en moyenne 1500 m/s et la masse volumique de l’eau de mer est de l’ordre de 1030 kg/m3. À titre de comparaison,
dans les sédiments, la masse volumique varie de 1300 à 2000 kg/m3 et la célérité vaut entre
1500 et 2500 m/s. Dans l’air, la vitesse du son est de 340 m/s pour une masse volumique de 1.3 kg/m3.
Les ondes acoustiques sont soumises à une perte d’énergie lors de leur propagation dans le milieu fluide, liée à un effet géométrique de divergence ainsi qu’à l’absorption de l’énergie acoustique par le milieu lui-même. La perte de propagation (ou de transmission) peut être décomposée en deux composantes, l’une pour la propagation verticale et l’autre pour la propagation horizontale. Exprimée en décibel, la perte par divergence géométrique (PT ) s’écrit :
P T = 20 log R1+ 10 log R2 (1.2)
où R1 représente la distance verticale entre la source et le récepteur et R2, la distance
horizontale entre la source et le récepteur.
La perte par amortissement est provoquée par la dissipation de l’énergie dans le milieu, du fait de sa composition chimique ou de sa viscosité, et dépend de la fréquence du signal. Elle est principalement influente aux fréquences supérieures au kHz et peut donc être négligée pour les signaux de fréquences basses (< 120 Hz) dont il sera question dans cette thèse. Par la suite, on considère donc que seule la perte par divergence géométrique atténue de manière significative l’intensité du signal hydroacoustique.
Vitesse de propagation dans l’océan
Dans l’océan, la vitesse des ondes acoustiques est contrôlée par les variables thermo-dynamiques décrivant sa composition (salinité), sa pression et sa température. L’eau de mer est constituée d’eau pure et de sels (chlorure de sodium, sulfate, magnésium. . . ) dont le pourcentage définit la salinité. En fonction de la position géographique, cette dernière varie, avec une moyenne de 35 ‰ dans les océans Atlantique, Pacifique et Indien. La salinité varie généralement peu en fonction de la profondeur (voir figure 1.1), sauf dans certaines conditions particulières (fonte des glaces par exemple). La température, quant à elle, décroit de la surface jusqu’au plancher océanique et seule la couche superficielle de la colonne d’eau connaît des variations importantes du fait des courants, des rayons solaires ou encore des interactions avec les continents et l’atmosphère. Passée la thermocline1,
la pression est la principale cause de variation de la vitesse du son. Cette dernière peut être obtenue à partir de l’équation d’état de l’eau de mer, établie de manière empirique (IES80, International Equation of state of Seawater, Millero et al. 1980) mais de nom-breuses autres relations simplifiées existent. On donne ici la formule de Medwin (1975), communément proposée dans les ouvrages d’acoustique sous-marine :
c= 1449.2 + 4.6T − 0.055T2+ 0.00029T3+ (1.34 − 0.01T )(S − 35) + 0.016z (1.3)
où c est la célérité en m/s, T est la température en °C, z la profondeur en m et S la salinité en ‰.
Au voisinage du minimum de célérité, l’énergie acoustique se concentre et les rayons émergeant de la source sont réfractés successivement dans cette tranche d’eau, définie comme le canal SOFAR (Sound Fixing And Ranging). Cette couche de faible vitesse du son agit comme un guide pour les ondes acoustiques, leur permettant de se propager sur de très longues distances avec une faible atténuation (figure 1.2). L’existence de cette couche d’eau a été reconnue dès les années 30 (Swainson, 1936) mais il faudra attendre la
1. Thermocline : limite thermique entre les eaux profondes, généralement froides et les eaux superfi-cielles, plus chaudes.
14500 1500 1550 1000 2000 3000 4000 5000 6000 Vitesse du son (m/s) Profondeur (m) 4°S 25°S 55°S 0 10 20 30 0 1000 2000 3000 4000 5000 6000 Température (C°) Profondeur (m) 4°S 25°S 55°S 33 34 35 36 37 0 1000 2000 3000 4000 5000 6000 Salinité (ppt) Profondeur (m) 4°S 25°S 55°S
Figure1.1 – Variation de la vitesse du son, de la température et de la salinité en fonction de la profondeur dans l’océan Indien, à trois latitudes différentes. La ligne pointillée noire indique la profondeur de l’axe du canal SOFAR et correspond au minimum de vitesse du son à 25°S.
Seconde Guerre Mondiale pour tirer profit des propriétés de propagation longue distance du canal SOFAR (Ewing et al., 1946). Bien que l’axe du SOFAR soit variable d’un point du globe à un autre (profondeur, minimum de vitesse), il existe dans tous les océans à l’exception des hautes latitudes polaires où l’absence de thermocline l’empêcherait de se former.
Le canal SOFAR confère une grande portée à de nombreux signaux. Ses propriétés sont par exemple utilisées par les cétacés pour communiquer ou se déplacer. Les ondes acoustiques, produites par les séismes sous-marins, peuvent également se retrouver piégées dans le canal, de même que des signaux d’origine volcanique. Leur enregistrement a permis de nombreuses avancées dans la connaissance de la tectonique des dorsales océaniques (Dziak et al., 1995, Fox et al., 1995, Smith et al., 2002). D’autres sons traversent également l’océan dans le canal SOFAR comme les craquements d’icebergs (Talandier et al., 2006) ou les bruits d’origine anthropique liés à la navigation ou l’industrie.
Figure 1.2 – Effet d’un coude dans le profil de vitesse du son, induit par la présence d’un minimum, sur la propagation des ondes acoustiques dans la colonne d’eau (d’après Wilcock et al. (2014)).
1.1.2 Notion de bruit ambiant
Mesure du niveau de son
Le niveau de son dans les océans est exprimé en décibel (dB), défini comme le rapport du logarithme de deux puissances P1 et P2, multiplié par dix :
SP L(dB) = 10 logP1 P2
(1.4)
En termes de pression acoustique, puisque la pression pi est proportionnelle à son carré p2
i, on exprime le niveau de son par :
SP L(dB) = 20 logp1 p2
(1.5)
Le niveau de son absolu, exprimé en pression acoustique sera alors :
SP L(dB) = 20 log p pref
avec pref = 1µP a. Le niveau de pression du son est ici défini par le rapport quadratique
de la pression et de la pression de référence. Si les mesures sont effectuées dans l’air on utilisera ainsi dB re 20 µP a2 et dB re 1 µP a2 si elles le sont dans l’eau. Dans cette étude,
toutes les mesures sont effectuées dans l’eau. On simplifiera ici l’écriture en exprimant le niveau de son en dB, sous-entendu dB re 1 µP a2.
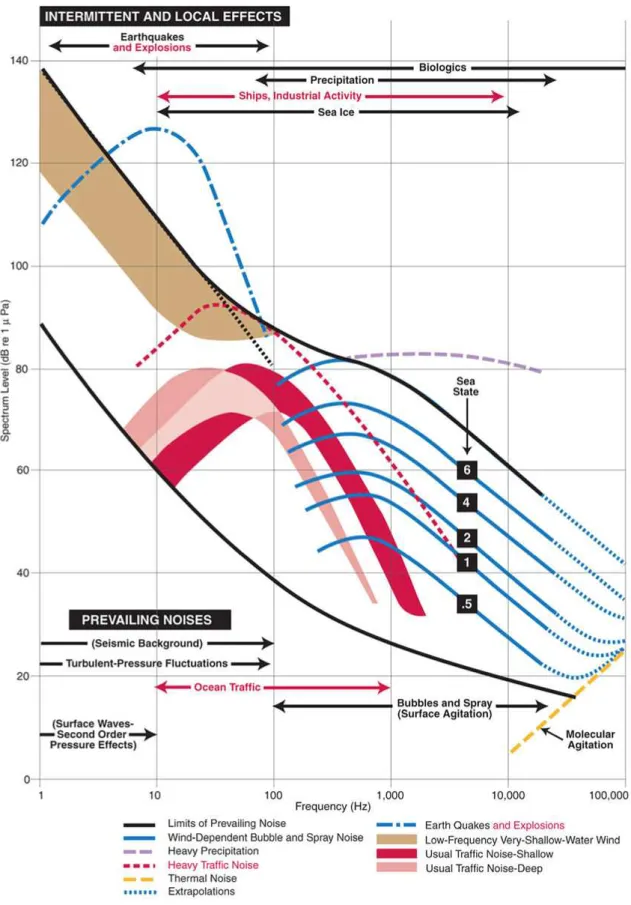
L’océan est loin d’être un monde de silence, tel que la culture populaire aime à le présenter. De nombreux phénomènes produisent continuellement des sons d’intensité va-riable, du plancher à la surface océanique. On définit ainsi le bruit ambiant océanique comme la contribution de tous les sons se propageant dans la colonne d’eau (Kibblewhite and Jones, 1976). Tremblements de terre, cris de baleines, vagues ou encore les moteurs de navires sont autant de phénomènes physiques participant à façonner le paysage sonore et correspondant chacun à des gammes de fréquence particulières (figure 1.3). On se propose ici de présenter, de manière non exhaustive, les différents sources de sons, naturelles et anthropiques, rencontrées dans les océans.
Sons d’origine naturelle
Les sources d’origines naturelles sont en général dominantes aux fréquences < 300 Hz, et sont variables au cours de l’année mais aussi de la position géographique. Parmi elles, se distinguent les sources d’origine biologique des sources non biologiques.
Sources biologiques :
• mammifères marins Les mammifères marins et en particulier les baleines, font usage du son sous forme de cris ou vocalises pour communiquer et se déplacer. • crustacés, poissons Certains crustacés et notamment des crevettes (e.g. Alpheus
heterochaelisi, Versluis et al. 2000) produisent du bruit par le claquement de leur
pince. Ces claquements, censés éloigner les prédateurs, peuvent atteindre des niveaux élevés quand ils sont nombreux (jusqu’à 30000 claquements par seconde).
Figure 1.3 – Spectre de puissance du bruit ambiant océanique, ou courbes de Wenz (d’après Miksis-Olds et al. 2013 et adapté de Wenz 1962).
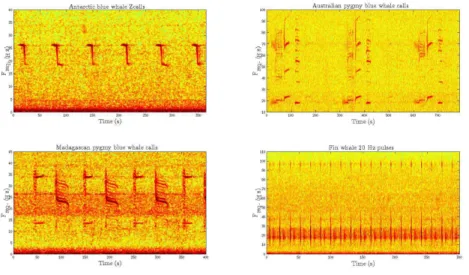
Figure 1.4 – Spectrogrammes typiques de quatre espèces de baleines, présentes dans l’océan Indien austral.
Sources environnementales :
• cryoséisme Un cryoséisme (icequake) est un tremblement de glace, par analogie avec un tremblement de terre. Un cryoséisme est généré par un mouvement de glace et n’est donc pas d’origine tectonique. Les déplacements du sol suite à un séisme pourraient en revanche être à l’origine de cryoséisme.
• iceberg À l’approche de l’été austral et avec l’augmentation des températures, le front de glace qui entoure le continent antarctique se délite pour former des ice-bergs. À la dérive, ceux-ci peuvent rentrer en collision et parcourir des centaines de kilomètre en remontant vers les latitudes sub-polaires. Les changements des tempé-rature et de pression qu’ils subissent, leur lente désintégration mais aussi les chocs entre eux génèrent des sons de forte amplitude, parfois de longue durée (ex. 30 mi-nutes) et sur une large bande de fréquences pouvant atteindre 400 Hz (Dziak et al., 2013).
• état de mer L’état de mer participe au bruit ambiant aux très basses fréquences (< 2 Hz).
niveau élevé, à des fréquences supérieures à 100 Hz.
• géologie Les séismes sous-marins générés aux dorsales océaniques produisent des ondes acoustiques, les ondes T, qui se propagent sur de très longues distances dans la colonne d’eau. Ces ondes ne présentent pas de danger par les populations côtières et leur analyse a montré un réel intérêt dans la compréhension des modes d’accrétion de la croûte océanique. Les ondes T ont une fréquence de 2 à 30 Hz environ, et leur niveau sonore peut atteindre plus de 200 dB.
Sons d’origine anthropique
Les sons d’origine anthropique sont de plus en plus dominants aux fréquences basses et intermédiaires du spectre et sont largement présents entre 10 Hz et 300 Hz. La navigation est la principale source de bruit, que ce soit du fait du trafic maritime, de l’exploitation des fonds marins ou de l’aménagement portuaire.
• activité industrielle L’exploration et l’exploitation de ressources minières et pé-trolières génèrent du bruit à cause des tirs sismiques (canons à air), de l’activité des plateformes, des forages ou explosions. . . . Ces bruits sont particulièrement présents dans le golfe du Mexique, le long des côtes californienne ou brésilienne ou encore en mer du Nord.
• navigation Cargos, superpétroliers, paquebots émettent des sons, générés par les moteurs, les hélices ou encore les génératrices. Ces sons, émis entre 20 Hz et 300 Hz peuvent atteindre de niveaux élevés. Un cargo de 173 m de long, naviguant à une vitesse de 16 noeuds émet ainsi un son d’une puissance de 192 dB (Hildebrand, 2009). Pour comparaison, l’oreille humaine peut supporter des sons jusqu’à 160 dB.
• activité militaire Les sonars militaires, une autre source de son assez puissante, émettent des ondes haute fréquence (10 kHz) sur des milliers de km.
Enjeux sociétaux et environnementaux
L’évaluation des niveaux de bruit associés aux différentes activités humaines dans l’océan est actuellement un sujet de débat qui touche différents domaines des sciences. En effet, la notion de pollution sonore, telle qu’on la connaît pour les espaces urbanisés par exemple, est de plus en plus présente dans les débats de société. Les océans Atlantique et Pacifique, en particulier, ont fait l’objet d’études approfondies afin de déterminer le niveau de bruit ambiant ainsi que les différents bruiteurs (Andrew et al., 2002, Hildebrand, 2009, Wenz, 1962). On observe une bonne corrélation entre l’augmentation du niveau sonore océanique et celle du trafic maritime durant ces 40 dernières années, suggérant ainsi que les bruits d’origine anthropique participent de manière significative au spectre de puissance (Hildebrand, 2009). Si cette croissance touche principalement les océans Nord Atlantique et Nord Pacifique (échanges Amérique du Nord-Europe-Asie), l’océan Indien n’en est pas exempté et connaît la plus forte augmentation du trafic depuis 10 ans (Tournadre, 2014). L’impact sur le milieu marin de cette activité est encore méconnu, mais des études de plus en plus nombreuses tendent à relier activités anthropiques et bioacoustiques (figure 1.5).
Parallèlement à ces études, le recensement et l’étude du comportement des cétacés suscitent un intérêt plus grand, notamment dans un objectif de préservation d’espèces en danger. L’estimation des populations des différentes espèces de baleine, depuis l’in-terdiction de la chasse dans les années 1970, reste encore très difficile. On estime par exemple que les baleine bleues antarctiques ont été exterminées à 99% depuis le début de la chasse à la baleine au début du 20e siècle. L’acoustique, par la détection de leurs
vocalises, s’avère une approche plus efficace que les observations directes pour approfondir nos connaissances sur leurs habitudes migratoires et reproductives, notamment dans les régions océaniques éloignées et difficiles d’accès. Les études sur le long terme montrent par ailleurs une diminution quasi-annuelle de la fréquence des vocalises de certaines es-pèces de baleines à différents endroits du globe, dont la raison n’est encore pas élucidée. La cause des échouages massifs de cétacés est aussi un objet de débat : comportement
Figure 1.5 – Seuil d’audibilité des poissons et mammifères marins et domaine d’émission des bruits anthropogéniques. Adapté de Slabbekoorn et al. (2010).
social solidaire autour d’un individu blessé ou égaré, fuite de prédateurs ou de conditions climatiques extrêmes, ou encore désorientation collective résultant de lésions auditives sévères causées par les sonars (figure 1.5). L’activité anthropique est souvent au cœur de ces problématiques et l’acoustique passive est sans doute l’une des approches les plus adaptées pour tenter d’avancer dans nos connaissances des mammifères marins.
Les interactions entre les différentes sources de sons dans les océans sont complexes et encore mal élucidées, les sources de bruit étant elles-mêmes mal comprises. Aux basses fréquences du spectre (< 10 Hz), la sismicité générée par les dorsales océaniques est la principale source de son et fait l’objet de la suite de ce travail.
1.2 Les ondes T
1.2.1 Définition
Par définition, les ondes T sont des ondes d’origine sismique dont au moins une partie du trajet de propagation s’effectue dans la colonne d’eau océanique (Tolstoy and Ewing, 1950). Leur propagation est facilitée par la présence du canal SOFAR, qui piège l’énergie acoustique et la diffuse sur de grandes distances, jusqu’à plusieurs milliers de kilomètres, avec une faible atténuation. Elles sont principalement générées par les séismes sous-marins, par conversion des ondes de volume en ondes acoustiques à l’interface du plancher océa-nique.
Les ondes T tirent leur appellation de leur position sur le sismogramme (T pour troi-sième) puisqu’elles se propagent à environ 1500 m/s dans la colonne d’eau et arrivent donc plusieurs minutes après les ondes de volume P et S, se propageant à 5-8 km/s dans la croûte (figure 1.7). Notons au passage que les ondes P et S, bien qu’arrivant en première et seconde position, respectivement, tirent leur nom des phénomènes mécaniques qu’elles engendrent (pressure wave et shear wave), contrairement aux ondes T. Du fait de la forte atténuation des ondes sismiques dans l’écorce terrestre, les séismes sous-marins, souvent de faible magnitude aux dorsales océaniques, sont rarement enregistrés par les stations
sis-mologiques. L’enregistrement des ondes T permet donc une amélioration considérable des catalogues de sismicité pour les régions océaniques, éloignées des systèmes de surveillance terrestres.
Les ondes T, bien que découvertes dès 1927 avec le développement de la sismologie moderne, n’ont été reconnues comme une phase acoustique que dans les années 1940, avec la déclassification des données de la Seconde Guerre Mondiale. En effet, jusque là, ces trains d’ondes tardifs étaient toujours enregistrés par des stations terrestres et res-taient énigmatiques (voir à ce sujet Okal (2008) pour une revue complète de la découverte des ondes T). Les premières observations de ces ondes ont été effectuées à l’observatoire volcanologique de Hawaï et interprétées comme un trémor volcanique, déclenché par un séisme ayant eu lieu en Alaska (figure 1.6). Depuis leur découverte, les ondes T sont iden-tifiées par leur arrivée tardive ainsi que par leur forme d’ondes particulière (e.g. Linehan 1940), suggérant une phase indépendante produite par un séisme. C’est dans les années 1950 que Tolstoy and Ewing (1950) établissent les bases théoriques de la génération des ondes T comme la conversion de l’énergie sismique en énergie acoustique à l’interface du plancher océanique, avec possibilité de conversion inverse en arrivant sur les côtes.
Si différents mécanismes de génération d’ondes T existent, leur forme est générale-ment reconnaissable. Contrairegénérale-ment aux ondes de volume, l’arrivée de l’onde T est plutôt émergente et le signal peut durer plusieurs minutes (figure 1.7), faisant penser à la forme d’un cigare. Plusieurs études ont tenté de modéliser la génération et la propagation des ondes T. Jamet et al. (2013) ont ainsi montré que cette forme d’onde, en cigare, semble être quasiment systématique, peu importe la profondeur ou le trajet de propagation.
1.2.2 Source et propagation des ondes T
Les ondes T peuvent être générées par divers mécanismes. Dans le cas des marges océaniques, les séismes produisent des ondes T de forte amplitude, du fait de la présence d’une pente importante et de réflexions multiples sur cette dernière. C’est ce que Johnson et al. (1963) appellent le mécanisme de downslope conversion ou conversion à partir d’une
Figure 1.6 – Premier enregistrement publié d’une onde T à l’observatoire d’Hawaï (Jag-gar, 1930). À l’époque, le signal est interprété comme un trémor volcanique tardif du volcan d’Hawaï, déclenché par un séisme survenu en Alaska.
200 400 600 800 1000 1200 1400 1600 1800 −0.2 0 0.2 Time (s) 200 400 600 800 1000 1200 1400 1600 1800 20 40 60 80 100 Temps (s) Fr é q u e n c e ( H z ) P S T 16/08/2012 06:07:01 78.2407°E 28.4910°S NEAMS P re s s io n n o rm .
Figure 1.7 – Sonogramme (en haut) et spectrogramme (en bas) d’une onde T, précédée du signal des ondes de volumes, P et S (elles-mêmes converties en ondes acoustiques au pied de l’hydrophone). Séisme du 16 août 2012 (mb = 4), localisé le long de la dorsale
Vitesse du son (km/s) P ro fo n d e u r d 'e a u ( k m ) Séisme
Diffusion par rugosité du plancher
Profondeur critique
Axe du canal SOFAR
Le relief dans le canal SOFAR agit comme un radiateur d'énergie
Figure 1.8 – Différents modèles de génération d’une onde T. Adapté de Williams et al. 2006. (a) Conversion à partir d’une pente et (b) par rugosité du plancher. (c) Selon la théorie des rais, les événements ayant lieu sous une profondeur critique ne se propagent pas dans le canal SOFAR. (d) Un mont sous-marin peut agir comme un radiateur à partir duquel l’énergie acoustique pénètre directement dans le canal SOFAR.
pente (figure 1.8a.), un modèle de génération entièrement basé sur la théorie des rais et proche de l’optique géométrique. En présence d’une côte inclinée d’un angle α, les rayons incidents vont être réfléchis avec un angle 2α à chaque cycle jusqu’à atteindre l’angle critique 12° et être éventuellement piégés dans le canal SOFAR.
L’activité magmatique, liée à un mont sous-marin peut également générer des ondes T par l’ouverture de fissures lors de la migration de fluides ou encore par explosion. Les ondes acoustiques alors produites peuvent soit être libérées directement dans le canal SOFAR à partir des hauteurs de l’édifice (figure 1.8d.) ou encore être réfléchies le long de pentes du volcan (downslope conversion). D’autres phénomènes naturels, comme un glissement de terrain peuvent, de même, générer des ondes T (e.g. Okal et al. 2003).
Si on comprend bien les mécanismes de génération des ondes T à partir de structures en relief ou pentues, les ondes T dites abyssales, en revanche, demeurent un défi théorique pour les acousticiens. Des séismes sous-marins intraplaque peuvent, effectivement, générer des ondes T de forte amplitude, bien que leur épicentre ne soit pas à proximité d’un relief important. Ainsi, une onde acoustique peut être générée dans toutes les directions, autour de la région épicentrale en l’absence d’un radiateur bathymétrique. Pour expliquer ce phénomène Johnson and Norris (1968) proposent un mécanisme de réflexion/diffusion multiple sur une surface océanique rugueuse (figure 1.8b.). Cette rugosité du plancher océanique serait ici le radiateur de l’énergie acoustique dans le canal SOFAR (Fox and Squire, 1994, Yang and Forsyth, 2003).
Cette dernière approche repose sur le formalisme modal et inclut dans ses modèles la notion de conditions aux limites réalistes. Les ondes acoustiques sont des ondes station-naires et peuvent donc être décrites par leur modes, qui décrivent leur état (un mode est une solution de l’équation de propagation). L’énergie acoustique peut être représentée par l’excitation de modes d’ordre bas au plancher océanique (de Groot-Hedlin and Orcutt, 1999). La propagation horizontale est rendue possible par les hétérogénéités du milieu, la bathymétrie ou encore la rugosité des interfaces, qui rendent possibles les transferts d’énergie d’un mode à un autre.
1.2.3 Ondes T et paramètres de la source sismique
Puisque les ondes T représentent une phase sismique générée par un séisme, elles de-vraient, d’une manière ou d’une autre, contenir des informations concernant la source sismique, surtout dans les fréquences > 2 Hz, peu échantillonnées par les stations sis-mologiques pour les téléséismes. En réalité, les paramètres de la source sismique ne se retrouvent pas si facilement dans la forme d’onde, comme la magnitude, la profondeur du séisme ou le mécanisme de rupture. La modélisation de la forme d’onde ne permet pas encore de montrer, par exemple, l’effet d’un type de mécanisme au foyer sur la dis-tribution radiale de l’énergie des ondes T (Tsang-Hin-Sun and Royer 2015 ; annexe 1). La modélisation montre toutefois que les ondes S produisent des ondes T plus énergétiques que les ondes P (Balanche et al., 2009).
Estimation de la magnitude
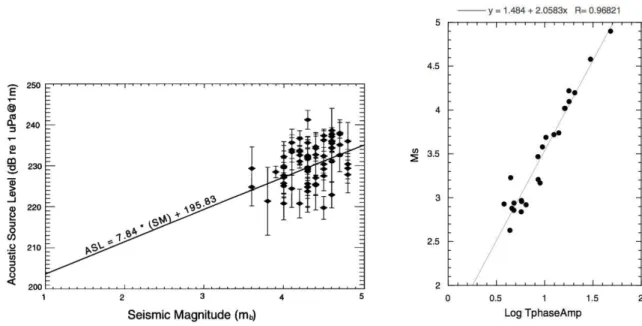
Plusieurs travaux ont tenté d’établir une correspondance entre magnitudes sismique et acoustique (la magnitude acoustique est plus souvent appelée Source Level, SL ou niveau acoustique de la source). Ces analyses sont toutefois limitées par le fait que les stations sismologiques n’enregistrent pas les séismes de faible magnitude et que les hydrophones tendent à saturer aux fortes magnitudes. À partir d’un catalogue de 87 séismes enregistrés dans l’océan Pacifique, Fox et al. (2001) établissent par régression linéaire une relation entre le Source Level et la magnitude de volume mb (figure 1.9). Bien que la corrélation
obtenue soit convaincante (R2
= 0.97), cette comparaison n’inclut que des magnitudes 4 ≤
mb < 5. D’autres relations, e.g. Yang and Forsyth (2003), ont été proposées, mais aucune
ne semble pouvoir être transposée d’une région à une autre et d’un type de magnitude à un autre. Dans l’océan Indien par exemple, Royer et al. (2015) montrent que les relations entre magnitudes acoustique et sismique varient en fonction du catalogue terrestre ou du type de magnitude sismique considéré. Il en résulte donc que la magnitude acoustique, même si elle est fortement dépendante de l’énergie de la source sismique ne la reflète pas directement. Autrement dit, à magnitude sismique égale, on peut obtenir plusieurs valeurs
Figure 1.9 – Relations entre Source Level et magnitude de volume (à gauche, Fox et al. 2001) et source Level et magnitude de surface (à droite, Yang and Forsyth 2003).
de magnitude acoustique. Cela indique que le niveau acoustique enregistré dépend aussi du mécanisme de conversion, qui peut donc différer d’un séisme à autre, et du trajet de propagation dans la colonne d’eau.
Mécanisme au foyer
Tentant de relier ondes T et la source sismique, Dziak (2001) montre que les séismes aux mécanismes de rupture décrochants semblent produire des ondes T de plus grande énergie que les séismes en faille normale, à une magnitude de moment donnée (figure 1.10) et propose une relation empirique entre mécanisme au foyer et intensité acoustique. Celle-ci implique que le niveau sonore des séismes pourrait être fonction de l’angle de glissement de la faille, maximum pour les failles purement cisaillantes et minimum pour les failles purement normales (ou inverses). Cette relation empirique, bien que basée sur des régressions linaires de faible qualité, semble en bon accord avec les résultats de simulations de Park et al. (2001). Depuis, cette relation n’a pas été étayée par d’autres travaux, si ce n’est la thèse de Balanche (2009) qui, par modélisation, tend à montrer que les mécanismes de rupture plus riches en ondes de cisaillement génèrent une énergie acoustique plus
Figure 1.10 – Relation empirique entre la magnitude de moment et la magnitude acous-tique pour des séismes au mécanisme décrochant (strike-slip) et des séismes au méca-nisme normal ou inverse (normal/reverse), dans l’océan Pacifique. Des relations différentes semblent exister selon le mécanisme de rupture (d’après Dziak (2001)).
importante.
Estimation de la profondeur
Si la forme générale de l’onde T est toujours reconnaissable, une grande variabilité de cette dernière est observée dans le détail. Ainsi, Williams et al. (2006) séparent les différents signaux d’ondes T en fonction de leur temps de montée, c’est-à-dire la durée entre le début de l’onde et l’arrivée du maximum d’amplitude. Ils remarquent alors que les temps de montée long correspondent à des événements profonds, tandis que les temps de montée courts correspondent à des événements peu profonds (< 2km). En revanche, ces observations contredisent ceux de de Groot-Hedlin and Orcutt (2001) et de Yang and Forsyth (2003), qui observent le contraire.
Ces travaux montrent surtout que les différences observées entre les ondes T et les ondes sismiques à leur origine sont principalement dues à la conversion sismo-acoustique sur le plancher océanique et à la propagation dans le canal SOFAR.
1.2.4 Traitement des enregistrements d’ondes T
Les ondes T sont aujourd’hui principalement détectées par des réseaux d’hydrophones autonomes, déployés en mer. Ces derniers ne sont relevés qu’au bout d’un an, voire deux et enregistrent des volumes de données très importants, de l’ordre de plusieurs centaines de Go. Leur traitement est avant tout manuel, même si des progrès on été réalisés dans la détection automatique des événements (Sukhovich et al., 2014). Les principales difficultés pour un traitement automatisé des données sont :
• la diversité des signaux acoustiques et des sources (séisme, éruption volcanique, iceberg. . . ) ;
• les variations de la forme d’onde en fonction de l’azimut ou de la distance ;
• les distances de propagation vers les stations, souvent très éloignées les unes des autres.
Le Pacific Marine Environnement Laboratory (PMEL) a mis au point le logiciel « Seas » de visualisation et de traitement des données de son parc d’hydrophones. Ce logiciel, utilisant les bibliothèques IDL, possède différents outils permettant l’analyse spectrale, le filtrage, la conversion audio mais aussi l’identification et la localisation d’évé-nements. Il permet ainsi à l’opérateur de visualiser simultanément les traces et spectro-grammes des données de plusieurs hydrophones d’un même réseau (figure 1.11). À partir de la reconnaissance spectrale d’un même événement, l’opérateur pointe les temps d’arrivée du signal identifié sur les différentes traces. Il est difficile de déterminer la première arrivée de l’onde T, très émergente, et on choisit généralement de pointer l’arrivée du maximum d’énergie. Puis, le programme en déduit une localisation préliminaire. Ces deux étapes sont réitérées jusqu’à obtention du minimum d’incertitudes sur la localisation et le temps origine de l’événement. Ainsi, outre la difficulté de la détection automatique de signaux de formes très variables, la reconnaissance et l’association automatique des signaux issus d’un même événement sur un réseau d’hydrophones reste un problème pour l’instant non résolu.
Figure 1.11 – Exemple d’utilisation du logiciel de traitement du PMEL « Seas » : un même événement est identifié sur différents hydrophones et les temps d’arrivée sont in-diqués par des traits blancs. La station MAD étant la plus proches de l’épicentre, on distingue aussi l’arrivée d’ondes de volume (P et/ou S) avant l’arrivée de l’onde T. Des répliques suivent le choc principal. Sur les spectrogrammes de NEAMS et SWAMS, un signal différent, émanant d’une autre source, est pointé en vert.
L’algorithme de localisation est basée sur une estimation des moindres carrés par une méthode non linéaire (Fox et al., 2001). On essaye de minimiser :
n X i=1 wi(ai− bi) 2 (1.7)
où wi est le poids, ai est le temps pointé sur l’hydrophone i et bi le temps prédit sur
l’hydrophone i, et N est le nombre d’hydrophones ayant enregistré l’événement. Le temps d’arrivée prédit est calculé à partir d’une localisation et d’un temps origine déterminé par :
bi = t + di ci
(1.8) où t est le temps origine, di la distance entre l’épicentre supposé et l’hydrophone i et ci,
la vitesse du son sur le trajet source-récepteur. Le logiciel utilise les vitesses de propa-gation du son extraites du Generalized Digital Environmental Model (GDEM), avec une résolution de 50 km environ et de variations temporelles saisonnières (Teague et al., 1990).
Contrairement à la sismologie terrestre, le champ d’incertitude est ici calculé par une méthode indirecte du fait du faible nombre de degrés de liberté (Fox et al., 2001) (peu d’hydrophones par rapport au nombre de paramètres à résoudre). Les incertitudes de localisation sont alors estimées par une méthode de simulation de Monte-Carlo.
La magnitude acoustique (SL, pour Source Level) mesure l’importance de l’événe-ment sismo-acoustique. Il s’agit d’une puissance acoustique, exprimée en decibels (dB re µP a/√Hz à 1 m) (Dziak, 2001, Dziak et al., 1997, Fox et al., 2001). Bien qu’un SL
soit calculé après chaque localisation d’un événement par le programme Seas, nous avons recalculé les SL de manière indépendante. Le signal brut est tout d’abord corrigé de la moyenne et converti en pression par correction de la réponse instrumentale, fournie parle fabricant des capteurs. Puis, le niveau sonore est tout d’abord calculé au récepteur i, comme la variance du signal dans la bande de fréquence f :
RLi = var(H(f)) + F (Di) (1.9)
où RLi est le niveau acoustique au récepteur i et H(f) est une fenêtre de signal de 10
secondes, centrée sur le temps d’arrivée du maximum d’énergie dans la bande de fréquence
f et F (Di) est ue fonction de la distance Di source-récepteur. Au sein du réseau composé
de N hydrophones, le Source Level s’exprime alors comme la moyenne des RLi :
SL= 1 N N X i=1 RLi (1.10)
Il existe plusieurs façons de définir la magnitude acoustique enregistrée, par exemple à partir de l’amplitude pic à pic du pic principal du signal ou son amplitude zéro à pic ou encore l’amplitude RMS du signal. Dans cette étude, nous avons choisi la définition 1.10 pour deux raisons. Le signal de l’onde T est de longue durée, présente un temps de montée important et comporte souvent plusieurs pics d’amplitude ; une estimation basée sur une fenêtre de temps longue de plusieurs secondes est donc plus représentative qu’une estimation à partir de deux points (d’autant plus qu’il existe des incertitudes sur le pointé du maximum d’énergie). Cette définition est aussi la plus communément utilisée dans les études hdyroacoustiques (Bohnenstiehl et al., 2002, Smith et al., 2002) et facilite ainsi la comparaison entre différents catalogues hydroacoustiques.
Le traitement manuel des données reste actuellement l’unique moyen d’analyser les données hdyroacoustiques des larges réseaux d’hydrophones autonomes. Ce protocole permet l’identification de nombreux signaux pour un observateur averti mais demande néanmoins un temps considérable (5 à 6 mois pour analyser un an de données sur sept hydrophones).
1.3 Enregistrement des sons : hydrophones et réseaux
1.3.1 La surveillance hydroacoustique dans les océans
Les ondes T sont particulièrement efficaces pour détecter l’activité sismique associée aux dorsales océaniques ou l’activité volcanique des monts sous-marins. En effet, guidées par le canal SOFAR, elles se propagent sur de très longues distances avec une faible at-ténuation (figure 1.12). Elles permettent ainsi l’enregistrement de nombreux événements, trop petits pour être détectés et enregistrés par les stations sismologiques terrestres. Le réseau Sound Surveillance System (SOSUS) de la Marine américaine est un des premiers à avoir été déployés dans les années 50 pour repérer les sous-marins autour du continent américain. Le dépouillement de ces données, dans les années 90, a démontré la richesse et le potentiel incontestable des réseaux d’hydrophones pour l’amélioration de la connais-sance des processus tectoniques dans ces régions éloignées (Fox and Squire, 1994, Fox et al., 1995). Le PMEL a, par la suite et pour compléter le réseau existant, développé des hydrophones autonomes afin de poursuivre la surveillance des dorsales océaniques du Pacifique dès 1996 et d’autres océans depuis.
Dans le cadre de l’Organisation du Traité d’interdiction complète des essais nucléaires (CTBTO2
), plusieurs stations de surveillance ont été installées à divers endroits du globe, formant ainsi un réseau de surveillance international (IMS3). Il compte onze stations
hydroacoustiques, dont trois dans l’océan Indien (Cap Leeuwin et Diego Garcia ; la station de Crozet n’a fonctionné qu’un an en 2003-2004) ; celles-ci sont câblées aux côtes ou îles à proximité et transmettent leurs données en temps réel au centre de données du CTBTO à Vienne. Jusqu’en 2007, ce réseau était, à notre connaissance, le seul réseau hydroacoustique présent dans l’océan Indien.
En 2002, le Laboratoire Domaines Océaniques (LDO) s’est associé au PMEL pour effectuer la surveillance acoustique de la dorsale Atlantique. Plusieurs réseaux ont été déployés depuis afin de couvrir la dorsale au nord et au sud des Açores (Goslin et al.,
2. Comprehensive Nuclear-Test-Ban Treaty Oganization 3. International Monitoring System
P ro fo n d e u r Célérité Croûte Surface Zone de conversion Ondes directes ydrophone immergé Lest 1000 m Bioacoustique Navigation Ondes T Fa ille > 1000 km
Figure1.12 – Principe d’une expérience hydroacoustique. L’hydrophone est mouillé dans le canal SOFAR, couche à faible vitesse du son dans la colonne d’eau. Ainsi, l’instrument enregistre les sons provenant de diverses sources, parfois à plusieurs milliers de kilomètres.
2012, Simão et al., 2010). Dans l’océan Indien, le réseau DEFLO (figure 1.13), constitué de trois hydrophones du PMEL, a été déployé entre octobre 2006 et janvier 2008 (Royer et al., 2015). Cette expérience de 14 mois a révélé une activité sismique non négligeable le long des dorsales océaniques. Parmi les autres surprises de cette expérience, on notera l’enregistrement de 5 espèces de baleines ainsi que de très nombreux événements d’ori-gine cryogénique de forte amplitude en provenance de l’Antarctique. Ces résultats ont motivé le déploiement d’un réseau de surveillance plus complet dans cette région riche en informations acoustiques.
1.3.2 Le réseau OHASISIBIO
Le réseau OHASISBIO (Observatoire HydroAcoustique de la SISmicité et de la BIO-diversité) est constitué de 6 à 8 hydrophones, répartis sur 5 à 7 sites, permettant de couvrir une grande partie du bassin océanique (figure 1.13). L’expérience a 2 objectifs majeurs : la surveillance des baleines bleues et de l’activité sismique associée aux trois
Figure 1.13 – Les réseaux hydroacoustiques dans l’océan Indien. Les trois sites en rouge forment le réseau DEFLO, complété des trois sites stations permantentes de l’IMS (en bleu). Deux sites d’observation (en jaune) on été ajouté pour former le réseau OHASISBIO
Table1.1 – Evolution du réseau OHASISBIO au cours du temps. La configuration utilisée dans cette thèse est celle de 2012, indiquée en caractère gras.
2010 2011 2012 2013 2014 NCRO1 ✕ NCRO2 ✕ NCRO3 ✕ ✕ ✖ ✕ WKER1 ✕ ✕ ✖ WKER2 ✕ ✕ ✖ WKER3 ✕ ✕ ✖ SWAMS ✕ ✕ ✖ ✕ NEAMS ✕ ✕ ✖ ✕ MAD ✕ ✕ ✖ ✕ RAMA ✖ ✕ SSEIR ✕
dorsales de l’océan Indien. En effet, les baleines bleues de l’Antarctique sont actuellement une espèce menacée dont le comportement est mal connu. Quant à l’activité sismique des dorsales, elle est généralement de faible magnitude (≤ Mw 5) et échappe aux réseaux sismologiques basés à terre. Outre les trois sites déjà occupés lors de l’expérience DE-FLO, le réseau est complété par un triplet d’hydrophones à l’ouest des Kerguelen ainsi qu’au Nord de l’archipel de Crozet. Espacés de 30 km, les instruments du triplet visent principalement l’enregistrement des cris des baleines afin de pourvoir identifier et loca-liser les individus. En raison de forts courants océaniques locaux, le triplet au Nord de Crozet n’est pas redéployé depuis 2011 au profit d’un instrument unique. En 2012-2013, le réseau a été complété au nord par la station RAMA, située à 7°S, pour couvrir l’océan Indien sub-tropical et mieux contraindre la localisation des événements au nord du ré-seau. Enfin, un nouveau site a été instrumenté en 2014, au sud de la dorsale Sud-Est Indienne, afin de surveiller cette partie de la dorsale qui semblait particulièrement active. Le réseau OHASISBIO est en constante évolution afin de répondre aux exigences de la recherche. Le réseau OHASISBIO est donc un observatoire pluridisciplinaire, maintenu à faible coût puisqu’il profite des voyages réguliers du N.O. Marion Dufresne dans l’océan Indien austral.
Figure 1.14 – Détail du système d’acquisition et de stockage des hydrophones du LDO.
1.3.3 Technologie et mise en place
Instruments et mouillage
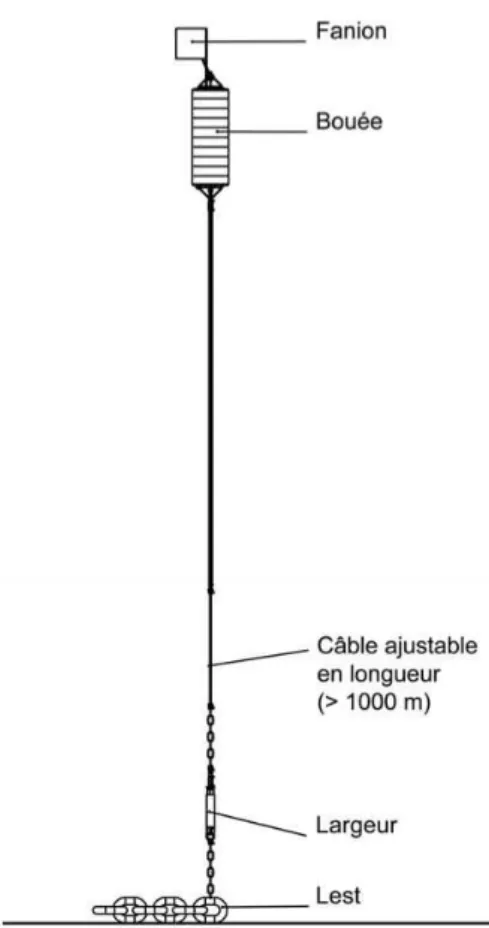
Les hydrophones qui constituent le réseau OHASISBIO ont été développés au Labo-ratoire Domaines Océaniques et fonctionnent sur le même principe que ceux du PMEL. Une ligne de mouillage est typiquement composée ainsi, de bas en haut (figure 1.14) :
• un lest (en maillons de chaîne ou en béton) ; • un largueur acoustique ;
• une ligne de mouillage composée de tronçons de câble pour une longueur ajustable de la ligne ;
• une bouée contenant l’instrument (isolé dans un tube étanche) et qui permet à la ligne de rester en tension ;
Figure 1.16 – Recherche et récupération d’un instrument. Recherche de la bouée conte-nant l’hydrophone à la surface, après largage du lest perdu (à gauche). La bouée est ensuite attrapée à l’aide d’un grappin et remontée à bord du navire (à droite).
des hydrophones.
Le déploiement d’un instrument se déroule de la même manière que la récupération. La ligne est déroulée, en partant du haut (figure 1.17), jusqu’à ce que le largueur et le lest soient mis à l’eau à proximité du site de déploiement choisi. Lors du déroulement de la ligne, il faut veiller à ce que la vitesse du navire soit constante et suffisante pour que le câble reste tendu. Le point de largage du lest diffère de la localisation planifiée de l’instrument, pour compenser l’effet de pendule de la ligne autour de la bouée lors de la descente du lest. Une fois le lest posé sur le fond océanique, on procède à sa localisation par triangulation. Pour cela, on détermine au moins 3 points, répartis de manière régulière autour de la position supposée de la ligne de mouillage. À partir de chacun des trois sites, on interroge le largueur acoustique à l’aide d’un modem acoustique. La position du mouillage est calculée par triangulation à partir des temps de parcours entre le navire, dont la position est connue (GPS), et le largueur acoustique. L’inversion peut supposer la profondeur du site connue ou la considérer, comme la vitesse du son, comme une inconnue.
Figure 1.17 – Mise à l’eau de la bouée contenant l’hydrophone. La ligne de mouillage doit rester en tension pendant tout le temps du déploiement, afin d’éviter qu’elle ne se rompe lors du largage du lest.
1.3.4 Limites et incertitudes de la méthode
Géométrie du réseau
Puisque l’on connaît les vitesses de propagation des ondes acoustiques, il est possible de prédire le champ d’incertitude de localisation des événements par rapport à la géométrie du réseau (Fox et al., 2001). Le principe de ces simulations consiste à appliquer une incertitude aux temps d’arrivée sur les sttaions pour une localisation donnée. L’erreur typique est de l’ordre de 0.75 secondes. Le long des trois dorsales, les incertitudes de localisation prédites sont de l’ordre de 2 à 4 km en longitude et de 2 à 6 km en latitude (figure 1.18). Les incertitudes sur le temps origine atteignent 3-4 secondes. La dorsale centrale indienne est la moins bien couverte par le réseau OHASISBIO. Les incertitudes en latitudes sont également plus grandes le long de la dorsale Sud-Est que Sud-Ouest indiennes. Cette dernière est néanmoins plus sensible aux variations en longitude. Puisque les trois instruments ne sont séparés que de 30 km au site WKER, les incertitudes prédites sont les mêmes selon qu’un ou les trois instruments sont considérés.
Figure 1.18 – Champ d’incertitude calculé pour le réseau complet, composé de 7 hydro-phones. Les incertitudes de localisation sont présentées en longitude (en haut), latitude (au milieu) et temps origine (en bas). (A.T.K. Lau, com. pers. 2014)
En pratique, il est rare qu’un événement soit détecté à tous les sites du réseau, surtout en tenant compte de la taille de ce dernier. Nous testerons donc plusieurs configurations possibles du réseau. Dans le cas où le site MAD est « sourd », le champ d’incertitudes prédites est fortement modifié (figure 1.19). Le long de la Sud-Est Indienne, les incertitudes varient de 3 à 6 km en longitude mais atteignent 8-10 km en latitude. Le long des deux autres dorsales, les incertitudes de localisation sont de l’ordre de 5 à 12 km e longitude et latitude. Les incertitudes de temps origine varient de 4 à 10 secondes aux extrémités du réseau, ce qui représente une marge d’erreur non négligeable.
L’absence du site SWAMS est moins dramatique que celle du site MAD (figure 1.20). Les incertitudes de localisation le les long des trois dorsales varient de 2 à 6 km en longitude et latitude. Les incertitudes sur le temps origine sont de l’ordre de 1.2 à 3 secondes, soit du même ordre de grandeur que lorsque el réseau est au complet.
Ces différentes expériences montrent la grande sensibilité du réseau aux modifications spatiales. Tandis que les incertitudes sont assez faibles quand toutes les stations sont utilisées lors de l’inversion, le champ d’erreur peut augmenter de façon significative quand le nombre de station est réduit, surtout dans les régions moins contraintes. Plusieurs facteurs peuvent amener à ne pas utiliser toutes les stations pour pointer un événement, et si la topographie est une cause systématique et prévisible, d’autres causes le sont moins et sont donc aléatoires. Il sera important de garder cette notion d’incertitude lors de l’interprétation des résultats.
Complétude du catalogue d’événements
La sensibilité des instruments, ainsi que l’éloignement de la source et l’atténuation des ondes dans la colonne d’eau font qu’il n’est pas possible d’enregistrer tous les signaux. Il existe ainsi une énergie limite à partir de laquelle le signal n’est plus détecté par le réseau de surveillance. En sismologie, on définit la magnitude de complétude par la magnitude minimale à partir de laquelle tous les séismes ont été enregistrés. On considère alors qu’à partir de cette magnitude, le catalogue est complet : c’est la magnitude de complétude. La
Figure 1.19 – Champ d’incertitude calculé pour le réseau sans le site MAD. Les incerti-tudes de localisation sont présentées en longitude (en haut), latitude (au milieu) et temps origine (en bas).
Figure 1.20 – Champ d’incertitude calculé pour le réseau sans le site SWAMS. Les incertitudes de localisation sont présentées en longitude (en haut), latitude (au milieu) et temps origine (en bas).