Context-based visual feedback recognition
Texte intégral
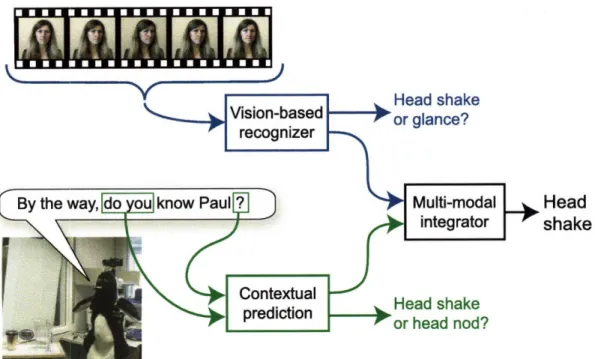
Figure
![Figure 1-1: Two examples of modern interactive systems. MACK (left) was designed to study face-to-face grounding [69]](https://thumb-eu.123doks.com/thumbv2/123doknet/14469113.521972/20.918.137.782.116.361/figure-examples-modern-interactive-systems-mack-designed-grounding.webp)



Documents relatifs
Our present objective is to demonstrate –by a proof of concept– that a search engine enhanced by implicit relevance feedback driven by eye gaze analysis could be implemented and used
For this experiment, the emotion fingerprint was constructed by aggregating the emotion values of all users. A big challenge is to identify the correct expected emotions and
Similarly, in our own work [15], we have shown that we can predict a number of visualization task types and user characteristics using simple machine learning techniques
We would like to underline the fact that, by explaining this process of an inward vision, physicians (Timothy Bright, Thomas Willis) have discovered that the power of
The purpose of this project is to determinate relationships between heterogeneous categories of data (physiological and emotional) and to study their impact on
In contrast, our convex method finds distance vectors from the convex hull of each class to the training samples (not the convex hull) of the other classes and uses a weight- ing
A real-time, haptics- enabled simulator for cell centered indentation has been devel- oped which utilizes the atomic force microscopy data (mechanical and geometrical properties
Gaze-congruity effects in Study 2 (indexed by reciprocal RT, multiplied by 100) for (A) young versus older participants, in response to supraliminal versus subliminal cues, averaged
