End-to-End Probabilistic Ego-Vehicle Localization Framework
Texte intégral
Figure




Documents relatifs
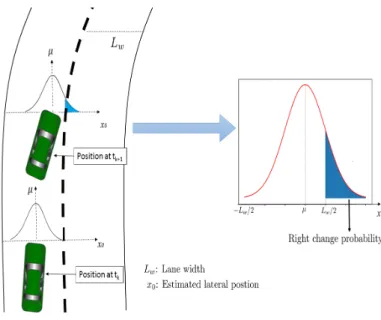
When both vision-based and map-based lane markings of current lane is obtained, vehicle positions are optimized using a multi-kernel based estimation method.. 4 shows the
When both vision-based and map-based lane markings of current lane are obtained, the vehicle position is derived using a multi-kernel based estimation method.. 1 illustrates the
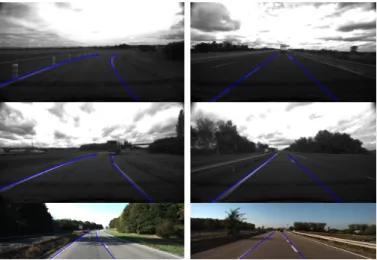
Based on a three-step process, (1) road primitives extraction, (2) road markings detection and tracking, (3) lanes shape estimation.. This algorithm combines several advantages at
Three processing modules, working as an individual thread at different frequencies, are combined: (1) the eVO module computes the camera pose at video rate, (2) the eFolki module
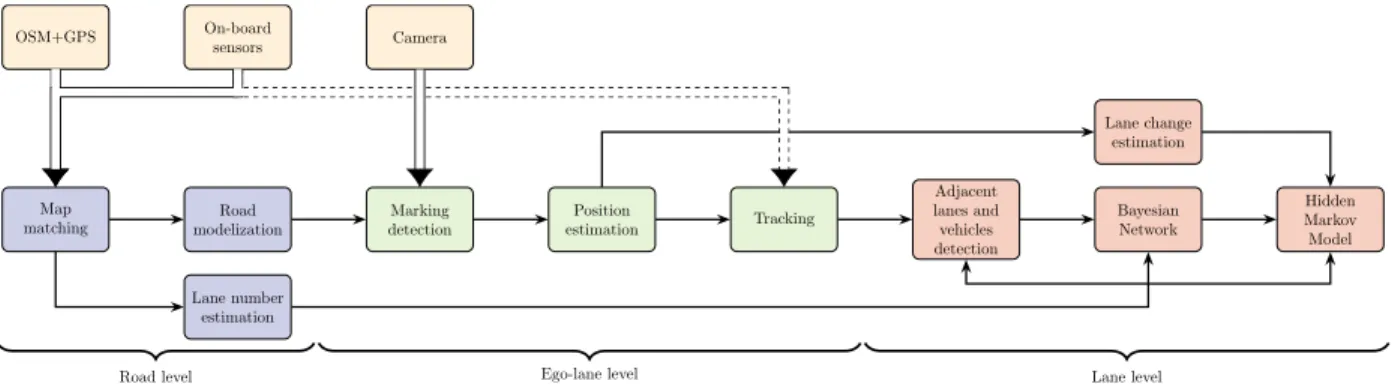
Abstract— Accurate and reliable localization is crucial to autonomous vehicle navigation and driver assistance systems. This paper presents a novel approach for online vehicle
indique que la surface des NPs s’enrichit progressivement en atomes de Pd, signe de l’existence de particules bimétalliques Au-Pd homogènes sous forme d’alliages. Cette
Due to the length scale provided by the lattice parameter, the effective continuous medium that mimics the electrokinetic response of a resistor lattice is characterized by a
Moreover we further explore the structure of co-occurrences by looking at the simplicial analogs of stars in higher dimension, which represent groups of concept (those in the core
