Quelques problèmes aux limites dans un secteur plan pour le système de lamé, l’opérateur de flexions et vibrations des plaques
83
0
0
Texte intégral
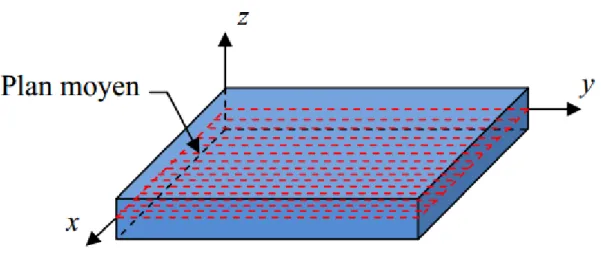
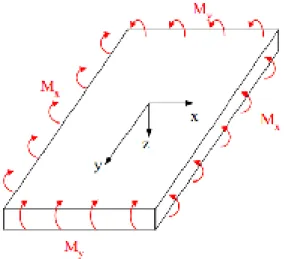
Figure
Documents relatifs