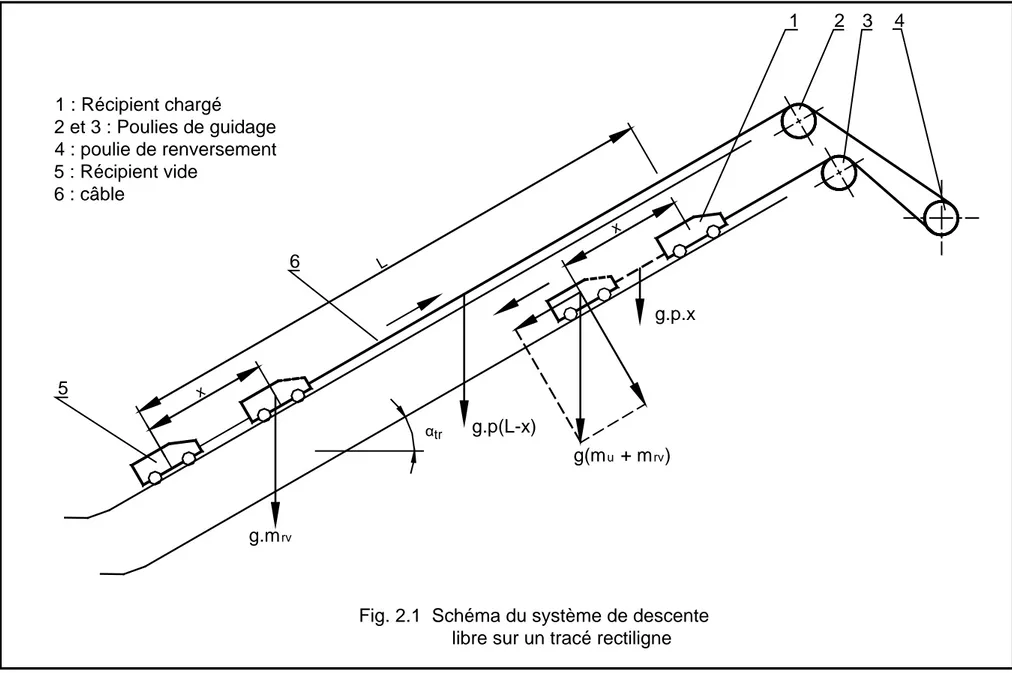
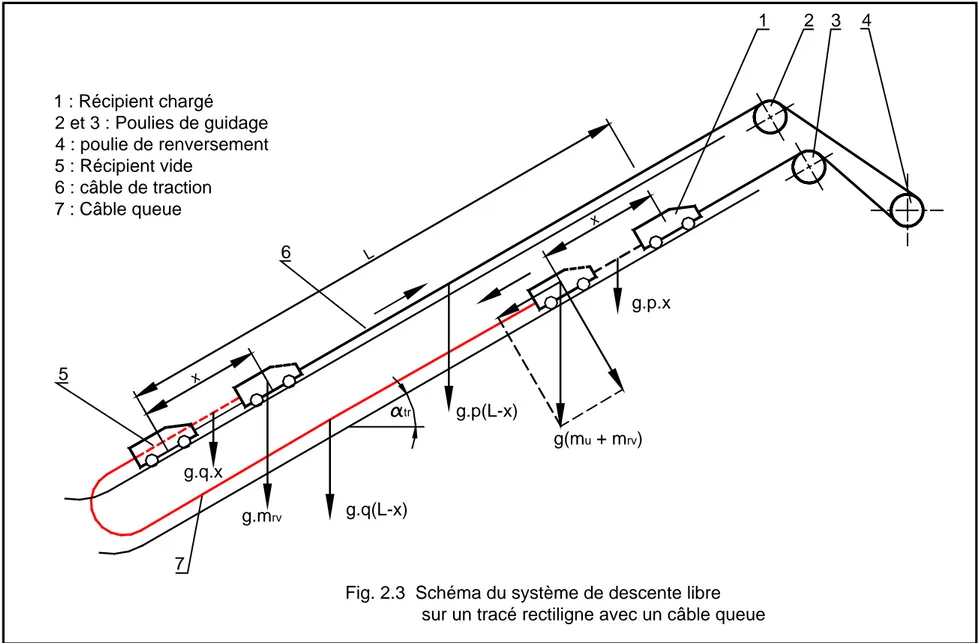
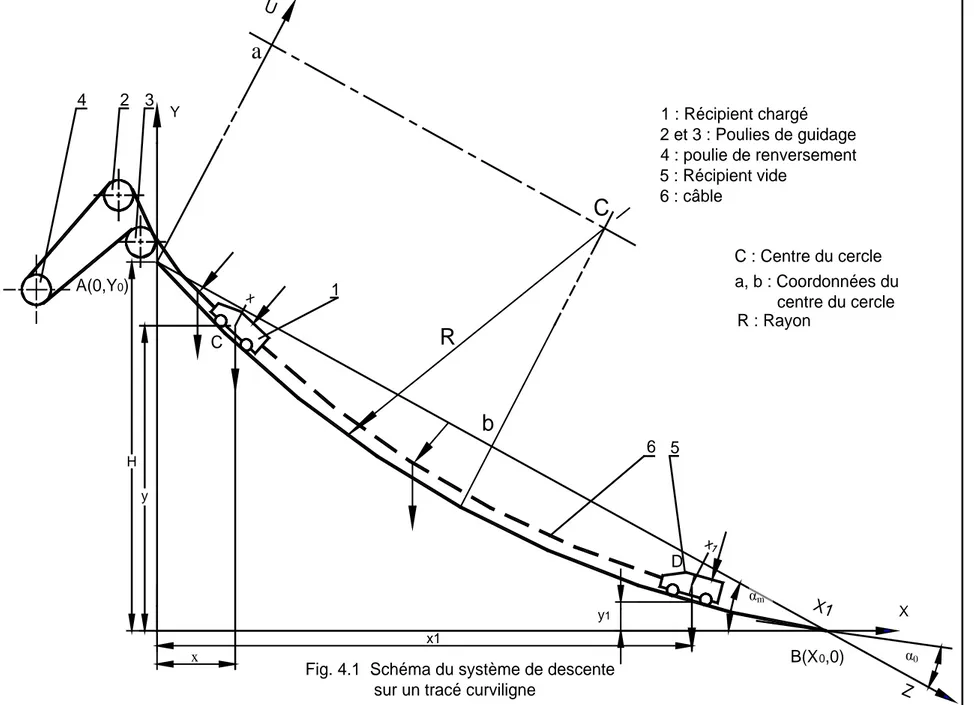
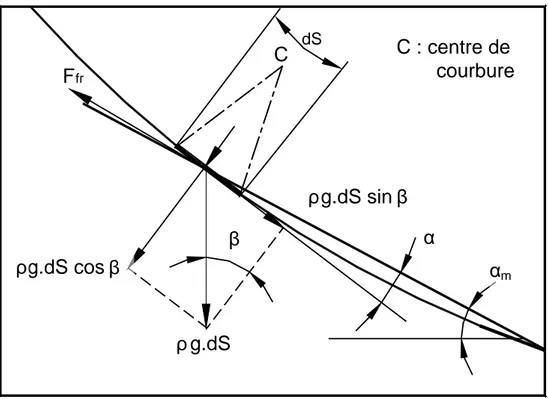
Théorie des systèmes de transport par câble
Texte intégral
Figure
Documents relatifs
Différentes mesures ont été réalisées en 2014 tous les 7 à 14 jours pour quantifier les dynamiques d’accumulation de matière sèche et d’azote dans les différents
Dynamiques passées des systèmes agricoles en France : une spécialisation des exploitations et des territoires permise par un usage accru des intrants de synthèse au détriment des
Convergence progressive du r ´eseau vers le r ´eseau optimal desservant les points fix ´es (en rouge), en partant d’un r ´eseau initial `a diam `etres ´egaux (r ´eseau de
Ainsi, pour un dépôt réalisé à 645°C, une diminution de la fraction molaire d’entrée en silane de 2,6 à 0,5% diminue d’un facteur deux le gradient maximal observé
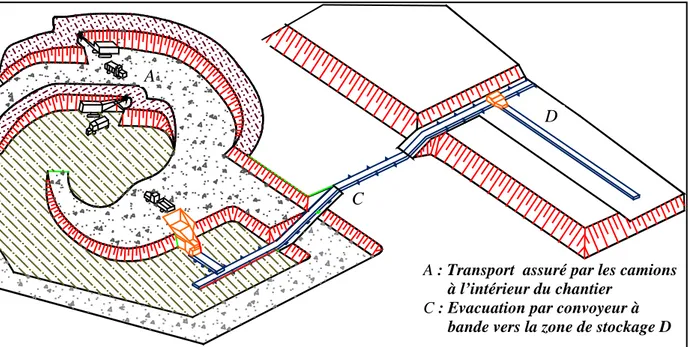
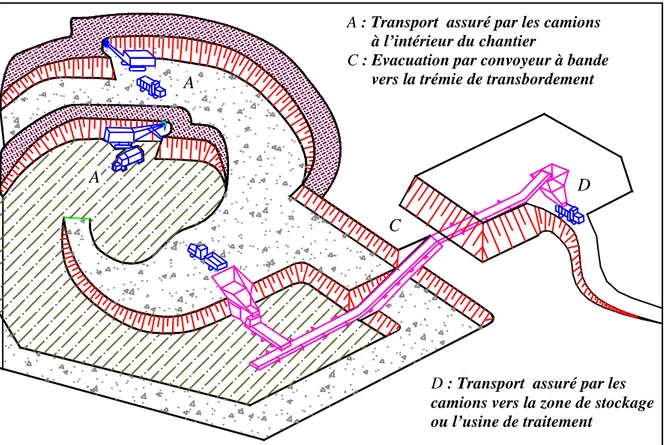
Prévisions à long terme : elles concernent les investissements lourds ou les travaux durables. Ce sont des prévisions qui sont le plus souvent dictées par la politique globale
Lorsque nous effectuons la comparaison avec la teneur en matière sèche de l’extrudat (27.0 % pour ratio L/S = 4 et 26.3 % pour ratio L/S = 7.6), nous constatons que la diminution
Au cours du temps la profondeur à laquelle se situe la zone saturée (8 %) diminue. Cette diminution est due soit à la recharge en eau d’une zone en cours de déshydratation
La boîte à outils Scicos de Scilab offre une structure modulaire pour construire des systèmes dynamiques hybrides en utilisant un éditeur de blocs-diagrammes. La figure 4.a
