Interconnection of the Kirchhoff plate within the port-Hamiltonian framework
7
0
0
Texte intégral
Figure
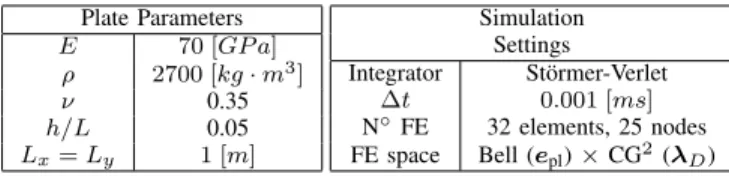
![Fig. 3: Snapshots at 2 different times (tend = 10 [ms]) of](https://thumb-eu.123doks.com/thumbv2/123doknet/2945064.79589/7.918.79.449.90.255/fig-snapshots-different-times-tend-ms.webp)
Documents relatifs
KPADONOU, “Numerical Analysis of the Mixed Finite Element Method for the Neutron Di ffusion Eigenvalue Problem,” Prog. GASTALDI, “Optimal Convergence of Adap- tive FEM for
We present the numerical analysis on the Poisson problem of two mixed Petrov-Galerkin finite volume schemes for équations in divergence form div c/?(ti, Vit) = ƒ.. The first
