MODÉLISATION DES INTERACTIONS SOL-OUTIL DELA CHARRUE À VERSOIRS AVEC LA MÉTHODE DES ÉLÉMENTS FINIS
Thèse présentée
à la Faculté des études supérieures
de lTJniversité Laval pourl'obtention du
grade de Philosophiae Doctor (Ph.D.)
Département de génie mécanique
FACULTÉ DES SCIENCES ET DE GÉNIE UNIVERSITÉ LAVAL
QUÉBEC
MARS 1998
Des simulations ont été effectuées avec la méthode des éléments finis pour déterminer les effets de composantes et d'ajustements variables de la charrue à versoirs sur sa stabilité en profondeur. Les forces sur l'outil et les contraintes
dans une argile Sainte-Rosalie ont été calculées en 3-D avec les modèles constitutifs du sol Cam clay et de friction Coulombien. Lalargeur du soc (W), le coefficient de
friction (p) de la surface et la pointe ont davantage influencé la stabilité. En effet,
la force verticale spécifique décroissait avec une augmentation de W. De plus, l'effet bénéfique de la pointe sur le soc était plus dominant à faible profondeur pour initier la pénétration du versoir. Une diminution de p a engendré des
variations bénéfiques des forces longitudinale et verticale sur le versoir et des contraintes dans le sol. Bref, il serait recommandé de concevoir un versoir ayant un faible déportement latéral, une surface avec un p minimal et une pointe sur le
socpour améliorer la stabilité de la charrue.
Carol Plouffe
Étudiant aux études supérieures Département de génie mécanique
Marc J. Richard Professeur titulaire, directeur Département degénie mécanique
Sylvio Tessier
Professeur titulaire, codirecteur
Département des sols
et de génie agroalimentaire
Claude Laguë
Professeur agrégé, codirecteur Département des sols et de génie agroalimentaire
Cette thèse s'inscrit dans le cadre d'un programme de recherche visant à concevoir une charrue à versoirs adaptée au labour superficiel. Son objectif général consiste à élaborer une méthode permettant de modéliser différentes composantes de la charrue. Les forces de réaction du sol sur l'outil ainsi que les contraintes dans l'argile Sainte-Rosalie et à l'interface sol-outil ont permis d'évaluer les résultats obtenus avec la méthode des éléments finis (MEF) et le logiciel Abaqus. Le mailleur automatique de I-DEAS s'est avéré très efficace pour obtenir des résultats similaires tout en réduisant le temps de calcul par huit pour un cas en 3-D. Les modèles constitutifs hyperbolique et Cam clay ont donné des résultats similaires à une vitesse de l'outil de 2 m/s mais inférieurs par un facteur de trois à de faibles vitesses pour le Cam clay. Le modèle de friction Coulombien était quatre fois plus rapide que le modèle hyperbolique pour des résultats similaires. Il a été conclu qu'une ligne de rupture prédéfinie n'était pas nécessaire pour obtenir les résultats désirés.
L'étalonnage d'un dynamomètre triaxial a permis de diminuer l'erreur sur la mesure de 4,9 à 2,2%. Les validations effectuées avec celui-ci sur un versoir ont démontré que les résultats obtenus avec la MEF et les modèles Cam clay et Coulombien sont semblables à la réalité sauf pour des vitesses inférieures à 1 m/s.
Un contresep, Aine pointe sur le soc et différentes vitesses, largeurs (W), profondeurs, angles d'attaque et coefficients de friction (|1) du versoir ont été examinés avec la MEF pour déterminer leurs effets sur la performance de la charrue. Tous ces paramètres ont influencé les résultats obtenus. Cependant, W, p et la pointe ont davantage influencé la stabilité verticale et latérale. En effet, la force verticale spécifique décroissait avec une augmentation de W. De plus, l'effet bénéfique de la pointe sur le soc était plus dominant à faible profondeur pour initier la pénétration du versoir. Une diminution de p a engendré des variations bénéfiques des forces sur le versoir et des contraintes dans le sol. Le contresep court requérait une distance plus élevée pour supporter la force latérale du versoir. Une attention particulière devrait être portée à son design pour éviter que des effets néfastes sur la stabilité verticale ne viennent s'ajouter aux effets du coutre et du soc.
du coutre, du contresep et de la profondeur sur la performance globale d'une charrue. Aucun problème de stabilité n'a été noté. Cependant, une augmentation de la distance pour atteindre la profondeur moyenne de 74 et de 293 mm a été enregistrée pour le contresep long et le coutre aileron, respectivement.
Bref, il serait recommandé de concevoir un versoir ayant un faible déport latéral,
une surface avec un faible p et une pointe sur le soc pour améliorer la stabilité de
la charrue.
Carol Plouffe
Étudiant aux études supérieures Département de génie mécanique
Marc J. Richard
Professeur titulaire, directeur Département de génie mécanique
Sylvio Tessier
Professeur titulaire, codirecteur Département des sols
et de génie agroalimentaire
Claude Laguë
Professeur agrégé, codirecteur
Département des sols
Je tiens tout d'abord à remercier mon directeur de recherche, M. Marc J. Richard, qui a su faciliter mon intégration au département de génie mécanique et qui m'a toujours encouragé avec une attitude gagnante et stimulante tout au long de mon doctorat. J'apprécie également l'indispensable support financier de mon codirecteur, M. Sylvio Tessier, ainsi que ses propos qui m'ont ouvert l'esprit face au doctorat. Je souligne aussi l'apport technique continuel de mon codirecteur, M. Claude Laguë, lors de l'élaboration du banc d'essai et de la prélecture de ma thèse. Sa présence régulière au pavillon Agriculture-Services m'a permis de résoudre certaines interrogations plus rapidement. Je dois également remercier, M. Neil B. McLaughlin, pour ses conseils en instrumentation et son aide apportée lors de l'expérimentation au champ à L'Ange-Gardien. Un sincère remerciement à M. Liqun Chi qui a accepté d'être mon examinateur externe et qui a su me faire bénéficier de sa très vaste expérience dans mon domaine d'étude.
Je tiens tout spécialement à exprimer ma gratitude à ma fiancée, France, qui m'a été d'un support inconditionnel malgré ses longues soirées passées sans ma présence. Quant à Andréanne et Colin, ils ont été mon rayon de soleil à travers les nuages. Je remercie également mes parents et ma famille qui m'ont toujours soutenu malgré la distance qui nous sépare et dont la richesse de leurs valeurs ne cesseront de m'éclairer.
Je ne saurais partir sans remercier mon compatriote de travail, M. Njara Ravonison, qui m'a éduqué à son intéressante théorie de la mécanique des sols. Ses compétences techniques et son intelligence m'ont permis de repousser les limites du possible. D y a aussi tous mes amis de génie agroalimentaire, mécanique et civil qui ont égayé mes journées et élargi mon champ de connaissances à travers des discussions que je ne suis pas près d'oublier.
Je suis également reconnaissant envers les membres du personnel du département de génie mécanique et agroalimentaire qui m'ont aidé tout au long de mes études doctorales à traverser les embûches du système universitaire. Et plus particulièrement, M. Louis Jalbert qui a été d'un support continuel pour mes essais en laboratoire et au champ. De même que M. Pierre Gaumond et M. Francis Roy
toujours aussi particuliers que pressants. Je tiens à souligner l'aide indispensable
apporter par YvesJean, Camille Rouleau, Luis Pablo Estable, Pascal Savard,
Paul-Martin Roy, Benoît Laçasse, Sylvain Tondreau et Yves Lapierre lors de la conception des composantes mécaniques et l'instrumentation du bac de sol.
Et finalement, je voudrais remercier le Conseil de Recherches en Sciences
Naturelles et en Génie du Canada (CRSNG) et le Fond pour la formation de Chercheurs et l'Aide à la Recherche (FCAR) pour les bourses octroyées ainsi que le Ministère de l'Enseignement Supérieur, le fond d'investissement étudiants de la FSAA et de l'Université Laval pour le financement de l'équipement pour l'automatisation du bac de sol.
A vous tous et à ceux que j'aurais oubliés, je vous transmets mes sincères remerciements.
RÉSUMÉ COURT... iii
RÉSUMÉ LONG... iv
AVANT-PROPOS... vi
TABLE DES MATIÈRES... viii
LISTEDES FIGURES... xiii
LISTE DESTABLEAUX... xx
LISTE DES SYMBOLES... xxii
CHAPITRE I INTRODUCTION... 1
1.1 PROBLÉMATIQUE... 1
1.2 OBJECTIFS... 4
CHAPITRE II INFLUENCES DU MAILLAGE, DU MODÈLE CONSTITUTIF DU SOL ET DU MODÈLE DE FRICTION SOL-OUTILEN TRAVAIL DU SOL AVEC LA MEF... 5 2.1 RÉSUMÉ... 5 2.2 INTRODUCTION... 6 2.3 OBJECTIFS... 7 2.4 MATÉRIELS ET MÉTHODES... 7 2.4.1 GÉNÉRALITÉS... 7 2.4.2 Raffinementdumaillage... 8
2.4.3 Modèles constitutifs du sol... 9
2.4.3.1 Modèle constitutifhyperbolique... 10
2.4.3.2 Modèle constitutif à l'étatcritique... 12
2.4.4 MODÈLES DE FRICTION SOL-OUTIL... 16
2.4.4.1 Modèle de friction hyperbolique... 16
2.4.4.2 Modèle de friction Coulombien... 18
2.5.1.1 Critères de sélection... 20
2.5.1.2 Contraintes déviatoriques... 21
2.5.2 MODÈLES CONSTITUTIFS DU SOL... 23
2.5.2.1 Forces sur l'outil... 23
2.5.2.2 Rupture... 24
2.5.2.3 Cheminement des contraintes... 25
2.5.3 Modèlesdefriction sol-outil... 28
2.5.3.1 Forces sur l'outil... 28
2.5.3.2 Effets néfastes de la friction... 29
2.5.3.3 Contraintes à l'interface sol-outil... 31
2.6 CONCLUSION... 32
CHAPITRE III PERTINENCE D'UNE LIGNE DE RUPTURE HORIZONTALE PRÉDÉFINIEÀ L'AVANT DE LA POINTE D'UNOUTIL DE TRAVAIL DUSOL POURUN PROBLÈME EN 2-D AVECLAMEF... 34 3.1 RÉSUMÉ... 34 3.2 PROBLÉMATIQUE... 35 3.3 OBJECTIFS... 36 3.4 THÉORIE... 36 3.4.1 IMPÉNÉTRABILITÉ... 36 3.4.2 GLISSEMENT... 37 3.4.2.1 Friction... 37 3.4.2.2 Mouvement relatif... 38 3.4.2.3 Séparation... 38 3.5 MATÉRIELS ET MÉTHODES... 40 3.5.1 GÉNÉRALITÉS... 40 3.5.2 Critèresdefissuration... 41 3.6 RÉSULTATS ET DISCUSSION... 43 3.6.1 Contraintesdéviatoriques... 43 3.6.2 Vecteurs-déplacements... 45
3.6.3 Forces surl'outil... 45
3.6.4 Indice derupture... 46
3.7 CONCLUSION... 49
CHAPITRE IV INSTRUMENTATION D'UN BANC D'ESSAI POUR MESURER LES FORCES SUR UN OUTIL DE TRAVAIL DU SOL... 51
4.1 RÉSUMÉ... 51
4.2 INTRODUCTION... 52
4.3 OBJECTIFS... 52
4.4 MATÉRIELS ET MÉTHODES... 52
4.4.1 UNITÉS MÉCANIQUES... 52
4.4.2 Asservissement de la vitesse duchariot... 56
4.4.3 Asservissementdelapositiondel'outil... 58
4.4.4 Dynamomètre... 59 4.4.4.1 Développement mathématique... 59 4.4.4.2 Dimensions... 60 4.4.4.3 Étalonnage... 63 4.4.5 Préparationdusol... 65 4.4.6 LABVIEW... 66 4.5 RÉSULTATS ET DISCUSSION... 68 4.5.1 ÉTALONNAGE DE LA VITESSE... 68 4.5.2 ÉTALONNAGE DE LA PROFONDEUR... 71 4.5.3 ÉTALONNAGE DU DYNAMOMÈTRE... 72 4.5.4 Analysespectrale... 75 4.6 CONCLUSION... 77
CHAPITRE V COMPARAISON ENTRE UNE SIMULATION EN 2-D ET 3-D AVEC LA MEF ET VALIDATION DES FORCES POUR UN VERSOIR (3-D)... 79 5.1 RÉSUMÉ... 79 5.2 INTRODUCTION... 80 5.3 OBJECTIFS... 81 5.4 MATÉRIELS ET MÉTHODES... 81 5.4.1 Comparaisonsdesimulationsen 2-D et 3-D... 81 5.4.2 Simulations (versoir)... 83
5.4.3 Validations (versoir)... 84
5.4.3.1 Bac de sol... 84
5.4.3.2 Préparation du sol... 85
5.4.3.3 Dynamomètre triaxial... 86
5.4.4 POINT D'APPLICATION DE LA FORCE RÉSULTANTE... 87
5.5 RÉSULTATS ET DISCUSSION... 88
5.5.1 Simulations en 2-D vs 3-D... 88
5.5.1.1 Forces sur l'outil... 88
5.5.1.2 Contraintes déviatoriques... 90
5.5.2 Simulations et validations duversoir... 91
5.5.2.1 Ajustement pour le soc... 91
5.5.2.2 Forces sur le versoir... 91
5.5.2.3 Distance pour la rupture... 92
5.5.2.4 Comparaison avec un essai au champ... 94
5.5.2.5 Comparaisons des forces latérales... 95
5.5.2.6 Point d'application de la force résultante... 96
5.6 CONCLUSION... 98
CHAPITRE VI PERFORMANCE DE LA CHARRUE À VERSOIRS DANS UNE ARGILE: SIMULATIONS ET EXPÉRIMENTATION...101
6.1 RÉSUMÉ / ABSTRACT... 102
6.2 INTRODUCTION... 103
6.3 OBJECTIVES... 103
6.4 MATERIALS AND METHODS... 104
6.4.1 Simulations... 104
6.4.1.1 Plow bottom... 104
6.4.1.2 Landside... 105
6.4.2 FIELD EXPERIMENT... 107
6.4.2.1 Experimental Site and Design... 107
6.4.2.2 Description of Equipments... 107
6.4.2.3 Procedure and Analysis... 108
6.5 RESULTS AND DISCUSSION... 109
6.5.1 Simulations... 109
6.5.1.1 Plowing Width and Depth... 109
6.5.1.3 Friction... 113
6.5.1.4 Share Angle of Attack... 113
6.5.1.5 Sharepoint... 115
6.5.1.6 Point of Application... 116
6.5.1.7 Soil Failure Mode... 117
6.5.1.8 Wear of Tillage Tool... 118
6.5.1.9 Landside... 119
6.5.2 FIELD EXPERIMENT... 121
6.5.2.1 Energy Requirements... 121
6.5.2.2 Pénétration Distance and Depth SD... 121
6.5.3 INTEGRATING EXPERIMENTAL AND SIMULATION RESULTS... 123
6.6 CONCLUSION... 123
CHAPITRE VII RECOMMANDATIONS POUR UNE CHARRUE À VERSOIRS ADAPTÉE AU LABOUR SUPERFICIEL... 125
CHAPITRE VIII CONCLUSION GÉNÉRALE...128
RÉFÉRENCES ...131
ANNEXE A Exemple d'un fichier source typique qui sera lu et exécuté par Abaqus... 139
ANNEXE B Programme pour le calcul du modèle hyperbolique de comportement mécanique du sol dans la routine UMAT... 146
ANNEXE C Programme pour le calcul du modèle hyperbolique de friction sol-outil dans la routine FRIC... 151
ANNEXE D Plans détaillés pour la construction du dynamomètre triaxial... 154
ANNEXE E Programme pour le calcul de la distance requise par la charrue pour atteindre la profondeur moyenne... 168
Figure 1.1 Représentation des composantes d'une charrue à versoirs et
du point virtuel d'application de la force sur le tracteur... 3
Figure 2.1 Représentation des conditions aux limites imposées aux noeuds et des dimensions du bloc de sol considérées en
fonction de la profondeur de l'outil (D=100 mm)... 8
Figure 2.2 Représentation du modèle élasto-plastique Cam clay dans
l'espace p:q:e... 13
Figure 2.3 Représentation du modèle élasto-plastique Cam clay dans le plan p:q (q=contraintes déviatoriques et p=contraintes
sphériques)... 14
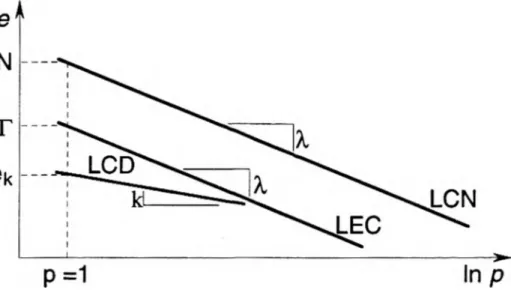
Figure 2.4 Représentation du modèle élasto-plastique Cam clay dans le plan e:ln p. Indice des vides (e) par rapport aux contraintes sphériques (p) avec les pentes pour le chargement-
déchargement élastique (k) et plastique (X)... 14
Figure 2.5 Représentation d'une boîte de cisaillement direct (Casagrant) utilisée pour déterminer les paramètres des modèles de friction
à l'interface sol-outil... 17
Figure 2.6 Contraintes de cisaillement (rs) en fonction du déplacement de la plaque métallique contre une argile Sainte-Rosalie (w=21%) avec une contrainte normale (an) de 80 kPa appliquée à
l'interface... 18
Figure 2.7 Régressions linéaires obtenues pour des essais de cisaillement direct entre une argile (w=21%) et une plaque métallique pour déterminer le coefficient de friction avec et sans coefficient de
cohésion selon le modèle de friction Coulombien... 19
Figure 2.8 Valeurs obtenues par simulation avec leurs tendances correspondantes pour les paramètres de forces longitudinales (Fx) et verticales (Fz) sur l'outil, d'énergie totale du système (Uh) et de temps (t) par rapport aux nombre de degré de liberté du maillage. Le déplacement de l'outil de 100 mm de profond dans une argile Sainte-Rosalie (pb=l,5 Mg/m3;w=20%)
Figure 2.9 Contraintes déviatoriques (q) dans le sol pour différents raffinements du maillage après l'avancement de 10 mm de l'outil de 100 mm de profond dans une argile Sainte-Rosalie (pb=l,5 Mg/m3; w=20%). Des éléments linéaires (CPE4) et
quadratiques (CPE8) ont été utilisés... 22
Figure 2.10 Contours de l'indice de rupture du sol selon les modèles constitutifs du sol Cam clay (Irc) et hyperbolique (Irh) après l'avancement de 10 mm de l'outil de 100 mm de profond dans
une argile Sainte-Rosalie (pb=l,53 Mg/m3; w=25,3%)... 24
Figure 2.11 Cheminement de l'état des contraintes déviatoriques (q) et de l'indice des vides (e) en fonction des contraintes sphériques (p) selon le modèle Cam clay pour un élément d'argile Sainte- Rosalie (pb=l,5 Mg/m3; w=20%) situé à 20 mm à l'avant de
l'outil (Début: ■)... 26
Figure 2.12 Cheminement de l'état des contraintes déviatoriques (q) et de l'indice des vides (e) en fonction des contraintes sphériques (p) selon le modèle Cam clay pour un élément d'argile Sainte-Rosalie (pb=1,5 Mg/m3; w=20%) situé en-dessous de la pointe
de l'outil (Début: ■)... 27
Figure 2.13 Profils de la masse volumique apparente sèche (rb) calculée selon le modèle Cam clay après le passage de la pointe de l'outil comprimant 3 mm d'une argile Sainte-Rosalie (pb=l,5
Mg/m3; w=20%)... 28
Figure 2.14 Forces de réaction longitudinales et verticales unitaires calculées pour les modèles de friction hyperbolique et Coulombien en fonction du déplacement d'un outil de 100 mm de profond dans une argile Sainte-Rosalie (pb=l,5 Mg/m3;
w=20%)... 29
Figure 2.15 Représentation des forces de réaction unitaires (kN/m) qu'un outil incliné à 60° doit appliquer pour se déplacer à une profondeur de 100 mm dans une argile Sainte-Rosalie (pb=l,5 Mg/m3; w=20%). Les trois schémas représentent une simulation sans friction (rupture du sol), avec friction (total)
friction hyperbolique et Coulombien après l'avancement de 10
mm de l'outil de 100 mm de profond dans une argile (pb=l,5
Mg/m3; w=20%)... 31 Figure 3.1 Schéma des conditions aux limites et des dimensions (D=100
mm) d'une simulation de travail du sol avec la MEF où une ligne de rupture a été insérée à l'avant de la pointe pour créer
l'interface sol-sol... 35
Figure 3.2 Représentation de la pénétration d'un noeud de la surface de contact maîtresse dans la surface esclave avec le code
d'éléments finis Abaqus... 37
Figure 3.3 Représentation des interfaces sol-sol et sol-outil ainsi que de
la rupture des noeuds de l'interface sol-sol provoquée par
l'avancement de l'outil... 38
Figure 3.4 Représentation des conditions de séparations avec le code
Abaqus pour les trois critères sélectionnés (A: contraintes; B:
espacement; C: distance-temps)... 39 Figure 3.5 Représentation du maillage conventionnel et avec une ligne de
rupture prédéfinie aprèsl'avancement de 20 mm de l'outil... 42 Figure 3.6 Profils de contraintes déviatoriques (q) et représentation du
déplacement des noeuds (direction et amplitude) calculés avec le Cam clay pour différentes méthodes de fissurations du sol après un déplacement de 20 mm de l'outil de 100 mm de profond dans une argile Sainte-Rosalie (pb=l,5 Mg/m3;
w=20%)... 44 Figure 3.7 Forces de réaction unitaires calculées avec le Cam clay pour
différentes méthodes de fissurations du sol après un
déplacement de 20 mm de l'outil de 100 mm de profond dans
une argile Sainte-Rosalie (pb=l,5 Mg/m3; w=20%)... 46 Figure 3.8 Profils de l'indice de rupture du sol (Irc) calculés selon le
modèle Cam clay après un déplacement horizontal de 20 mm
de l'outil de 100 mm de profond dansune argile Sainte-Rosalie
pointe de l'outil calculées en fonction de son épaisseur (ep) avec le modèle Cam clay. Seule la partie en-dessous de la pointe de l'argile Sainte-Rosalie (pb=l,5 Mg/m3; w=20%) est
simulée... 48
Figure 4.1 Schéma d'un bac avec le système d'irrigation souterraine... 53
Figure 4.2 Vue d'ensemble du banc d'essai avec ses composantes mécaniques et hydrauliques et le système d'acquisition et de
contrôle... 54 Figure 4.3 Diagramme-bloc du système d'asservissement de lavitesse du
chariot... 57 Figure 4.4 Schéma du système de mesure de la vitesse du chariot... 58
Figure 4.5 Schéma du système de coordonnées et des dimensions utilisés
pour déterminer la matrice de transformation théorique du
dynamomètre triaxial... 61
Figure 4.6 Système qui a été utilisé durant l'étalonnage pour appliquer
un moment latéral (y) pur au dynamomètre... 64
Figure 4.7 Schéma du montage utilisé pour évaluer l'homogénéité du
profil du sol avec le pénétromètre avant chaque essai... 65 Figure 4.8 Fenêtre créée avec le logiciel LabView sous l'environnement
Windows pour le contrôle et l'acquisition avec le banc d'essai... 67
Figure 4.9 Organigramme de la séquence établie par LabView pour un
essai typique permettant de mesurer les forces sur un outil... 68 Figure 4.10 Deux essais typiques utilisés pour déterminer les variations de
la vitesse du chariot en fonction de la charge appliquée avec
l'insertion du versoir dans une argile Sainte-Rosalie (pb=l,15
Mg/m3; w=21%)... 69 Figure 4.11 Régressions linéaires de la commande imposée par LabView
en fonction de la vitesse du chariot pour deux températures
de l'huile hydraulique... 71 Figure 4.12 Régression linéaire de la profondeur de l'outil (D) en fonction
de la tension lue (x) par le capteur de position linéaire avec
un système permettant d'appliquer un moment longitudinal
(x) pur sur le dynamomètre... 74 Figure4.14 Exemple de forces lues par les cellules de charges installées sur
le dynamomètre pour un essai avec un versoir à 100 mm de profondeur se déplaçant à 1 m/s dans une argile
Sainte-Rosalie... 76 Figure4.15 Analyse spectrale pour un essai avec un versoir à 100 mm de
profondeur se déplaçant à 1 m/s dans une argile Sainte-
Rosalie (pb=l,15 Mg/m3; w=21%) pour une cellule de charge
(Xi) parallèle à l'axe d'avancement (x)... 77 Figure 5.1 Schéma des étapes pour la création d'un maillage avec le
mailleur automatique de I-DEAS... 84
Figure 5.2 Exemples de mesures de résistance à l'enfoncement (Re)
effectuées avant chaque essai de validation pour vérifier
l'homogénéité du profil de sol... 86
Figure 5.3 Schéma du point de référence O où les moments ont été calculés pour les simulations (MEF) et pour les essais
(dynamomètre)... 87 Figure 5.4 Forces longitudinales et verticales appliquées sur un outil
droit de 50 mm de largeur par 100 mm de profondeur incliné à 60° se déplaçant dans une argile Sainte-Rosalie (pb=l,5 Mg/m3;
w=20%)... 89
Figure 5.5 Schéma des maillages utilisés et des contraintes déviatoriques (q) obtenues avec et sans le mailleur automatique. L'outil
droit incliné à 60° est avancé de 3 mm dans une argile
Sainte-Rosalie (pb=l,5 Mg/m3; w=20%)... 90 Figure 5.6 Forces de réaction longitudinales et verticales que le versoir
cylindrique doit appliquer sur une argile Sainte-Rosalie
(pb=l,15 Mg/m3; w=21%) pour se déplacer à différentes profondeurs de labour et vitesses d'avancement. Une force
verticale positive indique que le versoir cherche à s'enfoncer... 93 Figure 5.7 Comparaisons des forces longitudinales obtenues par des
simulations (MEF) et par des essais au champ (Plouffe et al. 1995a; Éq. 5.9) avec une argile Sainte-Rosalie (pb=l,5 Mg/m3;
Figure 5.8 Points d'applications de la force résultante du sol sur un versoir cylindrique obtenus par simulation (MEF) et par essai (dynamomètre) pour différentes profondeurs de labour (100,
150 et 200 mm) et vitesses d'avancement (0,25; 1 et 2 m/s)... 97
Figure 6.1 Meshing of the soil block being first compressed and then
rubbed by the landside sliding action... 106
Figure 6.2 Short and long (hatch) landsides used in the simulations and the field experiment to assess their ability to counter side force generated by latéral accélération of the soil on the plow
bottom... 106
Figure 6.3 Plow bottom components evaluated in the field experiment and in the simulations to assess their influences on plow
stability... 108
Figure 6.4 Spécifie forces calculated with FEM on a plow bottom travelling in a Sainte-Rosalie clay soil (pb=l,5 Mg/m3; w=20%). The standard settings are W=350mm, D=150 mm, v=2 m/s, 0S=45° and [1=0.5. Straight lines show linear trends
for each treatment... 111
Figure 6.5 Speed vector plots viewed from the back of the soil-tool surface nodes calculated with FEM after the plow bottom was moved 20 mm in a Sainte-Rosalie clay soil (pb=l,5 Mg/m3; w=20%). The standard settings are W=350mm, D=150 mm,
v=2 m/s, 0S=45° and [1=0.5... 114
Figure 6.6 Top view of plow bottom and soil meshings with 35 and 45° angle of approach (0S) to demonstrate the greater soil volume meshed at 0S=35° and also the soil volume not considered in
the simulations... 114
Figure 6.7 Diagram of the intersection between résultant force line of
action from the plow with the virtual hitch point on tractor... 116
Figure 6.8 Profiles of shear stress (ts) at the nodes and of spherical stress (p) in the éléments at the soil-tool interface calculated with FEM after the plow bottom was moved 20 mm in a
Sainte-Rosalie clay soil (pb=T,5 Mg/m3; w=20%). The standard settings are W=350mm, D=150 mm, v=2 m/s, 6S=45° and
Figure 6.9 Landside support and vertical forces calculated with FEM as short and long landsides are pushed into the furrow wall at
100 and 200 mm depths (pb=l,5 Mg/m3; w=20%)... 119
Figure 6.10 Sliding force due to landside rubbing on furrow wall at a depth of 200 mm. The landsides were first pushed over a 1 and 3 mm in the furrow wall and then moved longitudinally
to simulate field behavior... 120
Figure 6.11 Example of pénétration distances measured for the shallowest and the deepest depth settings in the pénétration zone of a
field experiment plot... 122
Figure 7.1 Représentation (vue en plan) du positionnement des versoirs pour une charrue conventionnelle et pour une charrue avec des versoirs à faible déplacement latéral du sol. Cette dernière configuration permet de réduire la longueur totale de la
les simulations avec le modèle de comportement mécanique du
sol Cam clay et le modèle defriction Coulombien... 12
Tableau2.2 Paramètres physiques entre une argile Sainte-Rosalie et un bloc de métal utilisés pour les simulations avec la MEF pour
lesmodèles de friction Coulombien et hyperbolique... 17
Tableau23 Forces maximales longitudinales (Fx) et verticales (Fz) obtenues avec les modèles hyperbolique et Cam clay après le
déplacement de 10 mm d'un outil droit incliné à 60° dans une
argile Sainte-Rosalie (pb=l,53 Mg/m3;w=25,3%)... 24 Tableau 3.1 Paramètres physiques d'une argile Sainte-Rosalie utilisés pour
les simulations avec le modèle de comportement mécanique du
sol Cam clay et le modèle de friction Coulombien... 41 Tableau 3.2 Paramètres utilisés par les modes de rupture à l'interface sol-
sol... 42 Tableau 41 Description des conditions standards d'utilisation des outils
susceptibles d'apporter les forces maximales sur le
dynamomètre... 55
Tableau42 Description des composantes mécaniques et hydrauliques du
banc d'essai... 56
Tableau43 Comparaisons entre les résultats obtenus avec les matrices de transformation théorique et réelle et les charges statiques
appliquées au dynamomètre... 73 Tableau 44 Tests statistiques pour vérifier les différences calculées avec les
matrices théorique et réelle et les charges appliquées au
dynamomètre... 75
Tableau 5.1 Paramètres physiques d'une argile Sainte-Rosalie utilisés pour
les simulations avec le modèle de comportement mécanique du
sol Cam clay et le modèle de friction Coulombien... 82 Tableau 52 Résultats de performances enregistrées pour différents modes
de maillages en 2-D et en 3-D avec la MEF (Abaqus) d'un outil
de 50 mm de largeur par 100 mm de profondeur se déplaçant sur une distance de 3 mm dans une argile Sainte-Rosalie
Tableau 53 Analyse de la non-concordance (LOF) entre les données
obtenues par simulations (MEF) et par essais
(dynamomètre)... 92
Tableau 5.4 Forces latérales obtenues par simulations (MEF) et par essais (dynamomètre) avec un versoir cylindrique qui se déplace dans une argile Sainte-Rosalie (pb—1,15 Mg/m3 et w=21%) à
différentes profondeurs et vitesses... 96
Tableau 53 Distances du point d'application de la force résultante du sol sur le versoir par rapport à la pointe du soc obtenues par simulations (MEF) et par essais en laboratoire
(dynamomètre)... 97
Table 6.1 Input parameters of a Sainte-Rosalie clay soil for the Critical State and Coulombic models used with FEM to model plow
bottom and landside performances... 105
Table 6.2 Forces and point of application distances from sharepoint on a plow bottom calculated with FEM in a clay soil (pb=l,5
Mg/m3; w=20%)... 112
Table 6.3 Plow performance measurements taken in a field experiment on a Sainte-Rosalie clay soil (pb=l,l Mg/m3; w=30%) with a
a angle de la ligne de force entre la charrue et le tracteur (°)
P paramètre associé à la surface de l'ellipse du Cam clay dans le plan p:q S distance entre la surface esclave et maître à une distance (d) du point de
fissuration (mm)
6C distance prescrite par l'usager pour la rupture Ae variation des déformations axiales
Aev variation des déformations volumétriques
E? déformation volumétrique plastique (J) angle de friction interne du sol (°)
Y-1 déplacement élastique lorsque Ts< Tcrit
y angle entre le dessous et le dessus de la pointe (°) T ordonnée à l'origine de LEC lorsque p=l kPa X pente de LCN et LEC (phase plastique)
Xt paramètre pour le mode de fréquence propre (1,875) |1 coefficient de friction sol-outil
v rapport de poisson
0p angle de pénétration de la pointe sur le soc par rapport à l'axe longitudinal (°)
0S angle d'attaque du soc par rapport à l'axe longitudinal (°) 0V teneur en eau volumétrique (m3 nr3)
|0| matrice des forces (N) de chaque cellule (Xi, X2, X3, Yi, Zi et Z2) pb masse volumique apparente sèche du sol (Mg m'3)
0123 contraintes majeure, intermédiaire et mineure (kPa)
Of, Tf contraintes normale et de cisaillement pour obtenir une rupture à l'interface sol-sol (kPa)
Qn contrainte normale à l'interface (kPa) ^crit contrainte de cisaillement (kPa)
Tmax contrainte de cisaillement maximale fixée par l'usager (kPa) Ts contrainte de cisaillement (kPa)
Tsi contrainte de cisaillement pour un incrément donné (kPa) G>1 constante indépendante de DDL
A produit de la largeur totale (Wt) et de la profondeur de labour (m2) [C] matrice constitutive du modèle de comportement du sol
C coefficient de cohésion interne du sol (kPa)
C12 variables dépendantes des forces (Fxyz) et moments (Mxyz) (N m2) d distance pour l'application de la norme de fissuration (m)
di23 distance entre les noeuds 1, 2 et 3 (m)
dxyz distance selon x, y et z entre le point d'application de la force sur l'outil et le point de référence O (m)
D profondeur de travail de l'outil (mm)
DDL nombre de degrés de liberté du système (nombre de noeuds x 2 en 2-D) e indice des vides
ek ordonnée à l'origine de LCD lorsque p=l kPa ep épaisseur de la pointe du soc (mm)
E module d'élasticité de Young de l'acier standard (200 GPa)
Eg i modules d'élasticité pour les modèles hyperboliques du sol et de friction Et écart type d'une moyenne (SD en anglais)
Eq module de déchargement pour le modèle constitutif du sol hyperbolique f critère de plasticité pour le modèle Cam clay
fr critère de rupture de l'interface sol-sol ft fréquence naturelle de la tige (Hz)
Fa facteur d'abrasion de l'outil (mm kPa4)
Ff tolérance de glissement maître-esclave (0,5 %) Fp tolérance de pénétration maître-esclave (0,5)
Fr force résultante (N) Fr = ^F2 +Fy2 +F2
Fxyz forces longitudinale^), latérale (y) et verticale (z) (N)
Fxyz p forces longitudinale^), latérale (y) et verticale (z) sur le soc (N)
Fxyz s forces longitudinale^), latérale (y) et verticale (z) spécifiques (kN m-2) |F| matrice des forces (FXyZ en N) et moments (Mxyz en N m)
g fonction potentielle plastique G module de glissement (kPa)
hi distance selon z entre X3 et le point de référence O (m) I12 distance selon z entre Yi et le point de référence O(m) h.3 distance selon z entre Xi etYi (m)
114 distance selon x entre Yi et Zi (m) 115 distance selon y entre Zi et Z2 (m)
Hc distance critique de pénétration d'un noeud de la surface maître (m) I moment d'inertie de la tige (m4)
Irc, Irh indice de rupture du sol selon les modèles Cam clay et hyperbolique k pente de LCD (zone élastique)
Ki facteur de conversion du compteur (600 puises tour'1) K2 facteur de conversion du convertisseur (10 V @ 3 kHz-1) K3 facteur de conversion de LabView (0,3791 m s* 1 V'1)
Ki, nj paramètres de régressions associés avec la pente initiale de chargement pour le modèle de friction hyperbolique
Ks, ns paramètres de régressions associé avec la pente initiale de chargement pour le modèle constitutif du sol hyperbolique
m, matrice de transformation théorique et réelle (6X6)
ïe longueur moyenne des éléments sur la surface de contact esclave (m) lm longueur d'un maillon de chaîne #80 (0,0254 m)
lt longueur de la tige (m)
LCD ligne de chargement-déchargement élastique (URL en anglais) LCN ligne de consolidation normal (NCL en anglais)
LEC ligne de l'état critique (CSL en anglais) mt masse unitaire de la tige (N m* 1)
M pente de LEC dans le plan p:q; aussi appelé indice de friction Mr moment résultant (N m) Mr = ^M2 +M2 +M,2
Mxyz moment autour des axes longitudinal, latéral et vertical (N m) n123 nombre de dents sur chaque engrenage
N ordonnée à l'origine de LCN lorsque p=l kPa p contraintes sphériques; Press (kPa)
pc pression de consolidation; ao*2 (kPa) Pa pression atmosphérique (kPa)
q contraintes déviatoriques; Mises (kPa) R taux d'abrasion (mm)
Re résistance à l'enfoncement (MPa)
Rri rapport de rupture à l'interface sol-outil Rrs rapport de rupture dans le sol
S degré de saturation du sol (%)
t temps pour obtenir la convergence après un déplacement de l'outil (s) T température de l'huile hydraulique (°C)
Uh énergie obtenue pour un essai à un DDL donné Ur énergie exacte du système
v vitesse d'avancement de l'outil (m s* 1)
vc commande à envoyer par LabView pour actionner le chariot (V) w teneur en eau pondérale du sol (%)
W largeur utile de l'outil (mm)
Wp largeur de la pointe sur le soc (mm)
Wr charge sur l'essieu arrière du tracteur (kN) Wt largeur totale d'un instrument (m)
xyz coordonnées spatiales d'un point sur la ligne directrice (m) X123 forces lues par les trois cellules selon l'axe longitudinal (N)
Yi force lue par la cellule selon l'axe latéral (N)
INTRODUCTION
1.1 PROBLÉMATIQUE
Les opérations de travail du sol consomment plus de la moitié de l'énergie consacrée à l'agriculture moderne (Buckingham et Pauli 1993). Parmi les équipements utilisés, la charrue à versoirs constitue le choix préféré des producteurs agricoles pour la préparation primaire du sol sous un climat tempéré comme l'Est du Canada. Son efficacité pour l'enfouissement des résidus ainsi que pour le contrôle mécanique des adventices (Buhler et Oplinger 1990) justifie amplement ce choix dans un contexte d'agriculture durable. Cependant la pratique actuelle du labour à plus de 200 mm causée par les changements des méthodes culturales et des équipements utilisés lui ont attribué des effets néfastes. L'érosion et la dégradation de la structure du sol en sont des exemples (Logan et al. 1991). Pour remédier à ces problèmes, la labour superficiel a été proposé par Bail et Robertson (1990) et Borresen et Njos (1994) car les autres méthodes alternatives comme le chisel ne permettent pas le contrôle efficace des adventices et ont une efficacité médiocre en conditions humides (Tessier et al. 1996). De plus, le labour superficiel pourrait diminuer la demande énergétique de 40% par rapport au labour actuel car celle-ci augmente avec la profondeur. Cependant les études antérieures de Plouffe et al. (1995b) et de Rackham (1984) ont démontré l'incapacité des charrues présentement disponible sur le marché de fonctionner adéquatement à des profondeurs en deçà de 150 mm.
Un programme de recherche a donc été initié en 1994 pour développer une charrue à versoirs adaptée au labour superficiel. L'essence de cette thèse s'inscrit dans la partie modélisation des interactions sol-outil de ce programme.
Pour modéliser les interactions sol-outil, les approches analytique ou empirique (McKyes 1985) et numérique (Chi et Kushwaha 1991) peuvent être utilisées. La première a déjà permis de résoudre certains aspects de problèmes relativement simple mais demeure imparfaite pour le problème présent (Hettiaratchi 1988).
(Hasbani 1997), l'approche numérique comme la méthode des éléments finis (MEF) a pris beaucoup d'ampleur (Dhatt et Touzot 1981). Cette méthode a la capacité de
résoudre des problèmes avec des outils à géométrie plus complexes et aussi avec des sols à comportement mécanique élasto-plastique. Cependant dans l'application
de la MEF, des mesures simplificatrices doivent aussiêtre effectuées.
Des hypothèses portant sur la géométrie de l'outil, le modèle constitutif décrivant le
comportement mécanique du sol et le mode de rupture du sol sont généralement considérées pour tout problème de travail du sol avec la MEF. La géométrie de l'outil est souvent simplifiée à un problème en deux dimensions (2-D) en assumant
qu'un axe est symétrique. Cette simplification n'est toutefois pas applicable à un
outil avec un rapport largeur/profondeur inférieur à quatre (Chi et Kushwaha 1990)
ou pour un outil à géométrie plus complexe comme un versoir. Les simulations
présentées en trois dimensions (3-D) se limitent à des géométries planes ou
légèrement incurvées (Chi et Kushwaha 1991; Araya et Gao 1995). La disponibilité actuelle d'algorithme de maillage de plus en plus évoluées soit dans des codes "maison" (Rang et Haghighi 1994; Tessier et al. 1994; Adriana et al. 1995) ou dans des logiciels commerciaux comme I-DEAS1 (SDRC, 2000 Eastman Dr., Milford, OH 45150-2740) peut maintenant faciliter cette tâche. Le modèle constitutifdu sol est aussi limité à des modèles relativement simples. Le modèle hyperbolique à
comportement élastique non-linéaire constitue le choix de la plupart des recherches
antérieures pour sa simplicité d'intégration dans les codes de MEF et pour sa corrélation avec les essais triaxiaux sur le sol à considérer (Chi et al. 1993a). Cependant, les modèles élasto-plastique plus sophistiqués comme le Cap (DiMaggio et Sandler 1971) et le Cam clay (Schofield et Wroth 1968) sont en voie d'obtenir plus d'attention car ils intègrent les phases de chargement-déchargement du sol et
qu'ils sont maintenant disponibles dans les codes commerciaux de MEF comme
Abaqus (HQS Inc, 1080 Main Street, Pawtucket, RI 02860-4847 USA). En troisième lieu, avec la MEF, le sol est discrétisé en sous-domaines qu'on appelle aussi éléments qui sont rattachés l'un à l'autre. Ces élément sont soumis à des forces
extérieures qui modifient les contraintes-déformations de chacun d'eux. Lorsqu'il y
1 La mention d'une marque de commerce ou d'une compagnien'implique pas l'endossement de ce produit par l'auteur ou l'institution qu'il représente.
a rupture selon la loi établie par le modèle constitutif, ces éléments demeurent liés l'un à l'autre. Cependant, Yong et Hanna (1977) ont introduit une interface horizontale au niveau de la pointe de l'outil pour permettre aux éléments des domaines supérieur et inférieur de se séparer l'un de l'autre au moment de la rupture. Cette méthode a l'avantage de permettre un déplacement supérieur de l'outil mais augmente la complexité du problème lors du maillage et des calculs.
La charrue à versoirs est constituée de plusieurs composantes qui sont directement en interactions avec le sol (Fig. 1.1). Parmi celles-ci, la pointe sur le soc et le contresep ont été cités par Plouffe et al (1995b) comme étant susceptibles d'être des composantes importantes pour la stabilité verticale et latérale, respectivement. La forme du versoir intervient plutôt sur l'intensité de l'émiettement désirée bien qu'elle peut aussi influencer l'accélération du sol et donc les forces transmises au châssis de la charrue (Barthélémy et al. 1992). Les forces de réaction du sol sur chaque versoir se totalisent en une force résultante ayant une ligne d'action qui passe par le point virtuel de l'attelage du tracteur (Kepner et al. 1978). La localisation de ce point de rencontre influence la stabilité du tracteur.
Soc Pointe Contresep Attelage porté Roue de profondeur Étançon Surface du sol
Ligne d’action de Point virtuel
la force résultante d’application de la force Figure 1.1 Représentation des composantes d'une charrue à versoirs et du point
1.2 OBJECTIFS
L'objectif général de cette thèse est d'élaborer une méthode permettant de modéliser les différentes composantes de la charrue à versoirs avec la MEF. Les objectifs spécifiques sont:
i) établir un modèle de comportement mécanique du sol, un modèle de friction sol-outil et un maillage qui pourront être utilisés efficacement avec un sol argileux et une géométrie d'outil complexe (chapitre II);
ii) déterminer la pertinence de l'utilisation d'une ligne de rupture horizontale prédéfinie pour obtenir les contraintes dans le sol et les forces de réaction du sol sur l'outil (chapitre III);
iii) vérifier en laboratoire la justesse des résultats obtenus avec les choix précédents pour une application pratique avec un ver soir (chapitres IV et V);
iv) utiliser la méthode développée pour vérifier la performance de certaines composantes de la charrue à versoirs tel que le versoir, la pointe et le contresep (chapitre VI).
Il est à noter que cette thèse est présentée sous forme d'article pour faciliter sa diffusion éventuelle dans des journaux scientifiques. Ainsi les chapitres II, III et V seront abrégés et soumis au Canadian Agricultural Engineering alors que le chapitre VI sera soumis aux Transactions of the ASAE.
INFLUENCES DU MAILLAGE, DU MODELE CONSTITUTIF DU SOL ET DU MODÈLE DE FRICTION SOL-OUTIL EN TRAVAIL DU SOL
AVEC LA MEF
2.1 RÉSUMÉ
Les influences du maillage, du modèle constitutif du sol et de la friction sol-outil sur la précision des résultats ont été examinées avec la méthode des éléments finis (MEF). L'extrapolation de Richardson s'est avérée une méthode simple et efficace pour déterminer le raffinement du maillage d'une application donnée. Pour un outil de 100 mm de profondeur, un maillage biaisé avec une longueur des arêtes des éléments quadrilatères de 8,3 mm à l'interface sol-outil a été le plus efficace. Les forces maximales longitudinales et verticales obtenues avec les modèles Cam clay et hyperbolique sont similaires à une vitesse de l'outil de 2 m/s mais diffèrent par un rapport de trois lorsque la composante d'accélération du sol n'est pas prise en compte (vitesse nulle). Cette différence marquante s'explique par le fait que la cohésion interne de l'argile utilisée soit relativement élevée et que le Cam clay ne considère pas ce paramètre contrairement au modèle hyperbolique. Des simulations ont démontré que le Cam clay peut facilement simuler le phénomène de chargement-déchargement lors du travail du sol pour un élément à l'avant ou en-dessous de l'outil. Le modèle de friction sol-outil Coulombien a occasionné des forces et des contraintes très similaires au modèle hyperbolique avec l'argile utilisée. Ces deux modèles ont calculé des contraintes de cisaillement qui augmentaient avec la profondeur de l'outil. Cependant, le modèle Coulombien est beaucoup plus simple et plus rapide en moyenne par unfacteur de quatre.
2.2 INTRODUCTION
Le travail du sol a toujours été une étape cruciale pour l'implantation et la protection d'une culture. C'est pour cette raison, qu'autant de recherches ont été conduites pour améliorer l'efficacité des outils nécessaires à cette tâche (Plouffe et al. 1995a et b; Gill et Vanden Berg 1968). Avec la venue d'ordinateurs dont les capacités de calcul ne cessent de s'accroître, on peut maintenant utiliser ceux-ci efficacement pour optimiser le design et les conditions d'utilisation de ces outils. Les méthodes analytiques ont déjà suscité beaucoup d'intérêt et permis d'apporter des conclusions pour des outils présentant des géométries relativement simples (McKyes 1985; Hettiaratchi 1988). Depuis plus d'une vingtaine d'années, les méthodes numériques ne cessent de croître en popularité. Parmi celles-ci, la méthode des éléments finis (MEF; Dhatt et Touzot 1981) est reconnue et acceptée par la communauté scientifique. Cette méthode permet entre autre de tenir compte de la géométrie d'outils plus complexes, tel un corps de versoir, et d'inclure un modèle constitutif de comportement du sol plus détaillé, comme le modèle élasto-plastique à l'état critique (Cam clay).
La MEF requiert cependant une connaissance approfondie du phénomène étudié sinon il peut en résulter des conclusions erronées. Depuis ses débuts, la puissance des ordinateurs s'est accrue selon un facteur de 2x8 par rapport au prix de la mémoire qui a diminué d'un facteur de 28 (Hasbani 1997). Alors Shen et Kushwaha (1993) ont développé des algorithmes qui optimisent le temps le calcul, celui-ci étant un facteur limitant encore plus présent en 3-D. Yazdani et al. (1997) ont quant à eux amélioré le rapport erreur/temps de calcul en optimisant le maillage. Les relations pour décrire le comportement du sol sont aussi une source de variabilité. Certains modèles sont plus adéquats pour des sols argileux ou partiellement saturés. Le modèle élastique non-linéaire (hyperbolique) est sans doute le plus utilisé de par sa simplicité et de sa corrélation avec les essais triaxiaux (Chi et al. 1993a). D'autres modèles comme le Cap (DiMaggio et Sandler 1971), le Cam clay (Schofield et Wroth 1968) et le Cam clay modifié (Ravonison 1998) sont mieux adaptés pour les phénomènes de plasticité rencontrés dans la majorité des problèmes de mécanique des sols. Cependant, ils requièrent plus de temps de calcul étant donné leur complexité. Le CNRC (1986) estimait à 104 millions de dollars Canadien par année les pertes directement reliées aux phénomènes d'usure et de friction sur l'outil lors des opérations de travail du sol. Il est donc essentiel de
2.3 OBJECTIFS
Les objectifs de ce chapitre consistent à déterminer les influences de la précision du maillage, du modèle constitutif décrivant le comportement du sol et du modèle de friction à l'interface sol-outil pour un problème de travail du sol avec la MEF. Les forces de réaction sur l'outil, les contraintes à l'interface sol-outil et les contraintes-déformations subies par le sol seront utilisées pour décrire les influences de ces trois paramètres.
2.4 MATÉRIELS ET MÉTHODES 2.4.1
G
énéralitésLe maillage, le modèle de comportement du sol et la friction à l'interface sol-outil représentent trois analyses distinctes. Toutes ces simulations ont été effectuées avec le logiciel commercial d'éléments finis Abaqus v5.6 (HQS Inc, 1080 Main Street, Pawtucket, RI 02860-4847 USA) sur une station HP755 ayant une horloge interne de 100 MHz et comportant 256 Mo de mémoire vive. Le modèle constitutif Cam clay a été utilisé pour les comparaisons de maillages et de friction alors que le modèle de friction Coulombien a été utilisé pour les comparaisons de maillages et de modèles constitutifs; ceux-ci s'étant avérés les plus versatiles et rapides lors des essais préliminaires. Un exemple de fichier d'entrée (.inp) exécuté par Abaqus, est présenté à l'annexe A.
Tous les maillages comportent un corps rigide (l'outil) discrétisé avec des éléments linéaires rigides R2D2 et un corps déformable (le sol) discrétisé avec des éléments quadrilatères linéaires à déformations planes CPE4 (HQS 1996). Le mode de friction "Finite sliding" (HQS 1996) est utilisé dans toutes les simulations pour régir les interactions entre le sol et l'outil. L'outil a un angle d'attaque de 60° par rapport à l'axe longitudinal, une profondeur (D) de 100 mm et HQS (1996) assume une largeur effective de 1 m pour les calculs en déformations planes (Fig. 2.1). Les dimensions du bloc de sol sont un peu plus élevées que celles utilisées par Chi et Kushwaha (1989) mais ont été jugées essentielles après quelques essais pour
éliminer les contraintes parasites où les conditions aux limites étaient appliquées. Bien qu'il soit possible d'effectuer un maillage avec Abaqus, le logiciel I-DEAS v2.1 (SDRC, 2000 Eastman Dr., Milford, OH 45150-2740) a été préféré pour la rapidité et la versatilité de son mailleur automatique. On ne tient pas compte de la vitesse de l'outil dans les calculs mis à part pour les comparaisons des modèles constitutifs, où une vitesse de l'outil de 2 m/s a aussi été utilisée. Les conditions aux limites imposées aux noeuds de chaque surface du sol sont présentées à la Fig. 2.1. Il faut ajouter que les conditions aux limites sur l'outil sont imposées à un noeud de référence dont la position est arbitraire. Généralement, la pointe de l'outil est choisie comme point de référence car elle est fixe malgré une variation en angle de l'outil. Ce dernier point est important car les moments retournés par Abaqus sont par rapport à ce point.
T
D V 1,5D i I ...VFigure 2.1 Représentation des conditions aux limites imposées aux noeuds et des dimensions du bloc de sol considérées en fonction de la profondeur de routil (D=100 mm).
2.4.2
R
affinement dumaillageL'erreur, lors d'un calcul mathématique, est définie comme étant la différence entre la solution exacte et la solution calculée. Cependant la solution exacte est souvent inconnue lors de la résolution des problèmes de travail du sol. L'extrapolation de Richardson peut être utilisée dans ce cas (Yazdani et al. 1997). Cette méthode est fondée sur le principe que la norme énergétique de l'erreur est monotonique et asymptotique et peut être décrite par la relation suivante:
Ur= énergie exacte du système,
coi= constante indépendante de DDL,
Cù2= taux de convergence de la norme énergétique.
Pour résoudre ce système à trois inconnues avec la MEF, un minimum de trois maillages à différents DDL est requis. Pour notre application de travail du sol, quatre maillages avec des éléments quadrilatères ayant une longueur d'arête de 50; 25; 12,5 et 6,25 mm ont été utilisés pour obtenir une asymptote de la norme énergétique convenable. Pour calculer Uh, HQS (1996) intègre le produit des contraintes totales {o}T par les déformations {e} pour chacun des éléments du volume (Éq. 2.2). Ce calcul est conservé dans la variable Allie (HQS 1996).
Allie, Ub = J(crUeW (2.2) V où: ' •» T - *\ ^3 > et
H-
^3 ' A -> ^132.4.3
M
odèles constitutifs du solDeux modèles constitutifs ont été comparés lors des simulations. Le modèle élastique non-linéaire (hyperbolique) a été retenu comme une référence car il est très populaire en travail du sol pour sa simplicité d'implantation dans des codes de calculs numériques et pour sa forte corrélation avec les résultats des essais triaxiaux (Chi et al. 1993a). Le modèle élasto-plastique à l'état critique (Cam clay) a aussi été retenu car il suscite de plus en plus d'intérêt de la part des chercheurs (Wulfsohn 1994). De plus, il est plus aisé d'obtenir ses paramètres d'entrés que d'autres modèles élasto-plastiques comme le modèle Cap (Chi et al. 1993a) et finalement car il est déjà intégré aux routines de base du logiciel de MEF que nous utilisons.
2.4.3.1 Modèle constitutif hyperbolique
Kondner (1963) a développé la première formulation hyperbolique de la variation de la contrainte déviatorique (q) en fonction de la déformation axiale (e). Duncan et Chang (1970) ont redéfini celle-ci pour les analyses par la MEF. Lors des calculs, ce modèle requiert la mise à jour du module d'élasticité (Es) et du rapport de poisson (v). Le module d'élasticité est calculé à partir des trois relations suivantes:
) 2C cos 0 + 2<j3 sin 0 (2-4)
(2-5)
C= coefficient de cohésion interne du sol (kPa), Ks, ns= paramètres empiriques,
Pa= pression atmosphérique (kPa), Rrs= rapport de rupture,
Sf= fraction du niveau des contraintes, 0= angle de friction interne du sol (°).
Le terme (^ -&3) correspond à l'asymptote du modèle et est défini à partir du critère de rupture de Coulomb (Éq. 2.6). Les contraintes ai et a3 sont les contraintes majeure et mineure, respectivement.
= C + CT, tan 0 (2.6)
Duncan et Chang (1970) utilisaient un v constant dans leur modèle. Chi et al. (1993b) ont proposé d'y ajouter une fonction linéaire (Éq. 2.7) de q pour étendre les applications possibles. Les paramètres a et b sont obtenus par régression. Cependant pour éviter des problèmes de convergence lors des simulations, le rapport de poisson était contraint à un niveau inférieur à 0,48. Lors des essais de Ravonison (1998), des problèmes avec le volumètre ont faussé les valeurs de
déformations volumétriques (ev). Il était donc impossible d'utiliser ces essais pour évaluer les variations des déformations axiales (Ae) et volumétriques (Aev) car v en fonction de q ne peut être obtenu qu'à partir de l'Éq. 2.8 (Shen et Kushwaha 1994).
v = a 4- b Sf
&E-A£v
2A£
(2.7)
(2-8) Donc pour les comparaisons des modèles constitutifs, nous avons utilisé les données obtenues par Chi et al. (1993a). Ces essais ont été effectués sur la même argile Sainte-Rosalie (23% de sable et 45% d'argile) mais à une teneur en eau pondérale (w) différente de 25,3% par rapport à une plage de 17 à 24% dans le cas de Ravonison (1998). La masse volumique apparente sèche moyenne était cependant similaire (1,53 vs 1,5 Mg/m^). Les essais de Ravonison (1998) ont tout de même permis de calculer les paramètres pour le Cam clay et ce sont ces paramètres qui sont utilisés pour les comparaisons de maillage et de friction (Tableau 2.1).
Pour des problèmes de travail du sol avec un outil étroit en 2-D, il faut utiliser des éléments à déformations planes CPE4 (HQS 1996). Et bien que le modèle hyperbolique n'utilise pas la contrainte latérale intermédiaire (02) pour les calculs de Es, celle-ci est essentielle pour le calcul de la matrice constitutive, [cj. La routine "UMAT" (HQS 1996) pour le calcul de [cl est inclue à l'annexe B.
1-v V V 0 [cl — V 1-V 0 0 (2.9) *■ * (1+v)(l-2v) \ / X / V V 1-V 0 l-2v 2 _ 0 0 0
Tableau 2.1 Paramètres physiques d'une argile Sainte-Rosalie utilisés pour les simulations avec le modèle de comportement mécanique du sol Cam clay et le modèle de friction Coulombien
Paramètres
Source *
Chi et al. (1993a) Ravonison (1998)
Masse volumique app. sèche pb (Mg/m3) 1,53 1,5
Teneur en eau pondérale w (%) 25,3 20,0
Degré de saturation S(%) 91,6 69,1
Cam clay
Pente de LCD t k 0,00531 0,0054
Pente de LEC et LCN X 0,05545 0,0931
Indice de friction M 1,01 1,41
Ordonnée avec p=l kPa, q=0 ei 1,1595 1,0956
Surface de l'ellipse
P
1 1Module de glissement G (kPa) 4665 5231
Hyperbolique
Module pour Es Ks 39,0 n.d. t
ns 0,52 n.d.
Rapport de rupture P-rs 0,82 n.d.
Coefficient de cohésion C (kPa) 45,8 n.d.
Angle de friction interne K) 18,2 n.d.
Rapport de Poisson V 0,38 n.d.
0,1 n.d.
* Les données de Chi et al. (1993a) ont été utilisées pour les comparaisons de modèles constitutifs alors que celles de Ravonison (1998) ont été utilisées pour l'optimisation de maillages et de comparaisons de modèles de friction sol-outil.
t LEC (ligne à l'état critique), LCN (ligne de consolidation normale) et LCD (ligne de chargement- déchargement élastique).
t Ces données ne sont pas disponibles.
2.4.3.2 Modèle constitutif à l'état critique
Le modèle constitutif élasto-plastique Cam clay a été développé par Roscoe et al. (1958) pour les sols argileux saturés puis amélioré par Schofield et Wroth (1968). Plusieurs auteurs y ont apporté des modifications mais HQS (1996) utilise toujours
le modèle original (Fig. 2.2). Dans ce modèle, l'indice des vides (e) varie en fonction de la contrainte déviatorique, q (Éq. 2.10) et de la contrainte sphérique, p (Éq. 2.11). Le sol change alors de volume et de forme continuellement en fonction des contraintes externes imposées jusqu'à l'obtention de l'état critique (rupture). À ce moment, il s'écoule comme un fluide donc sans variation de son volume. Les plans
q:p (Fig. 2.3) et e:ln(p) (Fig. 2.4) sont utiles pour visualiser le cheminement des états élastique et plastique de l'élément. Le paramètre p est spécifique au "Clay model" (HQS 1996) et permet de varier la forme de la surface d'écoulement plastique du domaine humide.
2
- <T2'
2
+
'<t2- a,
’
2+(<73-<Tj)2Mises, q =
Figure 2.3 Représentation du modèle élasto-plastique Cam clay dans le plan p:q (q=contraintes déviatoriques et p=contraintes sphériques).
Figure 2.4 Représentation du modèle élasto-plastique Cam clay dans le plan e:ln p.
Indice des vides (e) par rapport aux contraintes sphériques (p) avec les pentes pour le chargement-déchargement élastique (k) et plastique (X).
Le plan q:p est divisé en domaine super-critique (sec) et sous-critique (humide) par l'intersection de la ligne à l'état critique (LEC; Éq. 2.12) avec la surface d'écoulement plastique. Le paramètre M représente l'indice de friction du sol par analogie avec l'angle de friction interne (<|>) pour le modèle hyperbolique.
En phase élastique, l'état d'un élément se situe toujours en-dessous de la surface d'écoulement plastique. Lorsqu'il atteint cette surface, il entre en phase plastique. Un élément peut se dilater ou se comprimer tout dépendant si il atteint la surface
X
dans la zone sèche ou humide respectivement. A ce moment, la dimension de la surface varie selon le critère de plasticité (f). Et comme le Cam clay est un modèle associatif, sa fonction potentielle plastique (g) est aussi identique à f(Éq. 2.13). Les variations de l'état de consolidation initiale (pc) sont fonctions des variations de déplacement volumétrique plastique, d£? (Éq. 2.14). La valeur initiale de pc correspond à l'état de consolidation de l'élément donc de son passé en terme de chargement ultime.
f = g = <f - Af*[p(p c - p)J = 0 (2.13)
(1 + e)p
dpc = (2-14)
Dans le plan e:ln(p), la ligne de chargement-déchargement (LCD), la ligne de consolidation normale (LCN) et la ligne à l'état critique (LEC) sont idéalisées comme des lignes parfaites avec des pentes k et X respectivement.
LCD, e = eÀ - kln(p) (2.15)
LCN, e = N - Â ln(p) (2.16)
LEC, e = T-A ln(p) (2.17)
La LCD correspond au cheminement d'un élément en phase élastique. La LCN est atteinte lorsqu'il n'y a aucun cisaillement (q=0). Pour atteindre l'état critique selon la théorie du Cam clay, il faut que le sol atteigne la LEC dans les plans q:p et e:p
(Éqs. 2.12 et 2.17). Lorsque ces deux conditions sont remplies, le sol se déforme sans changement de volume. Les paramètres ek, N et T correspondent à la valeur de e pour chacune des équations lorsque p=l kPa (ln(p)=0).
2.4.4
M
odèles de friction sol-
outil2.4.4.1 Modèle de friction hyperbolique
La friction et l'adhésion à la surface de contact entre le sol et l'outil peuvent varier la force résultante pour déplacer l'outil dans le sol. HQS (1996) utilise un concept de maître-esclave pour gérer les interactions entre deux corps qui sera présenté plus en détails au troisième chapitre de cette thèse. Avec ce concept, il est possible d'utiliser le modèle de friction Coulombien déjà intégré au code d'Abaqus ou de programmer un autre modèle dans une routine externe FRIC (HQS 1996). Dans la présente étude, la routine du modèle hyperbolique a été programmée en Fortran 90 (Microsoft Corp. P.O. Box 72368 Roselle IL 60172-990) et celle-ci est appelée par le programme d'entrée principale. Cette routine est inclue en annexe C.
Ce modèle a été initialement développé par Clough et Duncan (1971) et a été utilisé par plusieurs auteurs (Chi et Kushwaha 1991; Kushwaha et Shen 1995) à cause de sa forte corrélation avec les essais de cisaillement direct. De tels essais ont été conduits avec une boîte de Casagrant (Fig. 2.5) ayant une surface de contact sol-métal de 3481 mm2. La plaque métallique a été découpée sur une surface plane d'un soc de versoir. Il était important d'utiliser ce matériel plutôt qu'un acier ordinaire car la surface était polie et avait subi un traitement thermique pour réduire son coefficient de friction. Une argile Sainte-Rosalie, identique à celle utilisée pour les essais triaxiaux servant à déterminer les paramètres des modèles constitutifs, a été utilisée pour le sol. Cette argile a été séchée pendant 24 heures à 105°C puis passée dans un tamis de 1,68 mm pour uniformiser le mélange et obtenir rapidement la teneur en eau voulue lors des essais. Des teneurs en eau pondérale (w) de 21 et 24% ont été sélectionnées pour correspondre aux essais triaxiaux de Ravonison (1998). Les pressions normales de 20, 40, 60 et 80 kPa représentent une plage de valeurs susceptibles d'être rencontrées lors des simulations. La vitesse de la section inférieure de la boite était de 0,406 mm/min.
s
A partir de ces essais, les paramètres pour le calcul du module tangentiel (Ei) du modèle hyperbolique (Éq. 2.18) ont été calculés (Tableau 2.2). On vérifie aussi à l'intérieur du code que la contrainte maximale de cisaillement (Tmax) calculée avec l'Éq. 2.6 ne dépasse pas la contrainte de cisaillement (ts) retournée par la routine.
n‘f F; =K; ^- + 1 P Va 7 j T, fin ^"inax 7
Ki, ni= paramètres de régressions associé à la pente initiale de chargement, Rri= rapport de rupture.
On
h - 59 mm
Figure 2.5 Représentation d'une boîte de cisaillement direct (Casagrant) utilisée pour déterminer les paramètres des modèles de friction à l'interface sol-outil.
Tableau 2.2 Paramètres physiques entre une argile Sainte-Rosalie et un bloc de métal utilisés pour les simulations avec la MEF pour les modèles de friction Coulombien et hyperbolique
Paramètres Valeurs
Hyperbolique
Module pour Ei Kj (kPa) 50230
ni 2,813
Rapport de rupture Rri 0,89
Coefficient de cohésion C(kPa) 4,6
Coefficient de friction g 0,43
Coulomb
Coefficient de friction p- 0; 0,43 et 0,50*
* Le modèle Coulombien avec un coefficient de friction de 0,50 a été utilisé pour les comparaisons de modèles constitutifs et pour l'optimisation du maillage.
La Figure 2.6 représente bien la majorité des essais uniaxiaux. On peut y remarquer que les contraintes de cisaillement augmentent très rapidement et atteignent Tmax en moins de 1 mm de déplacement de la plaque. Les essais avec w égal à 24% n'ont pas fonctionné car la rupture du sol est survenu avant le glissement sol-métal.
Déplacement
de
la
plaque
métallique
(mm)
Figure 2.6 Contraintes de cisaillement (Ts) en fonction du déplacement de la
plaque métallique contre une argile Sainte-Rosalie (w=21%) avec une contrainte normale (<Jn) de 80 kPa appliquée à l'interface.
2.4.4.2 Modèle de friction Coulombien
Il faut toujours un déplacement de l'outil supérieur à 1 mm lors des simulations pour obtenir une rupture adéquate selon les études antérieures en travail du sol (Chi et Kushwaha 1989; Kushwaha et Chen 1995). Il est donc évident que Ts est presque toujours égale à Tmax avec ce modèle et que le modèle Coulombien devrait donner des résultats assez similaires. Pour cette raison, les paramètres du modèle Coulombien (Éq. 2.6) ont aussi été calculés dans le but de vérifier cette affirmation. Comme le modèle Coulombien inclut dans la routine d'Abaqus ne comprend pas de cohésion, des régressions linéaires avec et sans coefficient de cohésion (C) ont été effectuées. Des coefficients de friction (p) de 0,43 et 0,5 ont ainsi été obtenus (Fig. 2.7).
Figure 2.1 Régressions linéaires obtenues pour des essais de cisaillement direct entre une argile (w=21%) et une plaque métallique pour déterminerle coefficient de friction avec et sans coefficient de cohésion selon le modèle de frictionCoulombien.
HQS (1996) permet de contraindre la TCrit à une Tmax donnée pour éviter qu'elle ne
✓
dépasse la Tmax du sol. Dans le cas présent, une Tmax basée sur l'Eq. 2.6 a été
utilisée pour le calcul de Tcrit que l'on doit atteindre pour qu'il y ait glissement.
Tcri, = minimum^ (2.19)
Avec ce modèle, les déplacements sont nuis si Ts est inférieure à TCrit- Cependant pour faciliter la convergence de l'algorithme avec la MEF, HQS (1996) utilise une
formulation élastique de glissement. Cette formulation permet un certain
glissement (yCrit) qui dépend des paramètres émis parl'usager. Dans le cas présent
une tolérance de glissement (Ff) de 0,5% était convenable avec un maillage uniforme à la surface sol-outil.
(2.20) où:
ï = longueur moyenne des éléments sur la surface de contact esclave (m).
Ce Ycrit est ensuite combiné à Tsi et TCrit pour calculer le déplacement élastique à
chaque incrément de calcul. On voit que pour augmenter yf il faut soit augmenter
crit-où:
y‘l = déplacement élastique lorsque Ts< Tcrit (m),
Tsi= contrainte de cisaillement pour un incrément donné (kPa).
2.5 RÉSULTATS ET DISCUSSION
2.5.1 RAFFINEMENT DU MAILLAGE
2.5.1.1 Critères de sélection
L'effet du raffinement du maillage a tout d'abord été quantifié par les résultats de l'énergie totale du système contenu dans la variable Allie (HQS 1996) après l'avancement de l'outil de 10 mm. Comme cette variable n'est pas un critère de design commun, les forces maximales longitudinales (Fx) et verticales (Fz) appliquées sur l'outil ont aussi été calculées. Contrairement à Uh, les forces ne correspondent pas nécessairement au déplacement maximal de l'outil car la force maximale a plutôt été atteinte après seulement 4 mm de déplacement.
Les tendances pour Uh, Fx et Fz sont très similaires et correspondent bien à l'équation de Richardson (Éq. 2.1). On peut noter qu'à partir de 1500 degrés de liberté (DDL) ou 12,5 mm de longueur moyenne d'un élément, le raffinement semble suffisant (Fig. 2.8). De plus, le temps requis pour effectuer une simulation est multiplié par 10 si on double le raffinement pour atteindre des éléments de 6,75 mm alors que le gain en précision sur les forces est minime.
Après qu'un raffinement de maillage ait été établi, nous avons voulu utiliser celui-ci pour créer un maillage plus efficace. En effet, le maillage uniforme est plus simple à réaliser mais très peu performant si on désire augmenter le raffinement. Avec la venue de mailleurs automatiques ou même dans la plupart des codes "maisons", il est possible de raffiner le maillage aux endroits de contraintes et de déformations maximales et de réduire la complexité aux extrémités où les effets sont négligeables. En ce sens, un maillage a été crée avec une dimension moyenne de 8,3 mm pour les éléments à l'interface sol-outil avec un biaisage de ceux-ci vers l'extrémité droite et le bas pour augmenter graduellement leur taille.