BIOMÉCANIQUE DE L’ANCRAGE DE VIS PÉDICULAIRES POUR L’INSTRUMENTATION DU RACHIS
ROHAN BIANCO
DÉPARTEMENT DE GÉNIE MÉCANIQUE ÉCOLE POLYTECHNIQUE DE MONTRÉAL
THÈSE PRÉSENTÉE EN VUE DE L’OBTENTION DU DIPLÔME DE PHILOSOPHIAE DOCTOR
(GÉNIE MÉCANIQUE) DÉCEMBRE 2015
UNIVERSITÉ DE MONTRÉAL
ÉCOLE POLYTECHNIQUE DE MONTRÉAL
Cette thèse intitulée :
BIOMÉCANIQUE DE L’ANCRAGE DE VIS PÉDICULAIRES POUR L’INSTRUMENTATION DU RACHIS
présentée par : BIANCO Rohan
en vue de l’obtention du diplôme de : Philosophiæ Doctor a été dûment acceptée par le jury d’examen constitué de :
Mme VILLEMURE Isabelle, Ph. D., présidente
M. AUBIN Carl-Éric, Ph. D., membre et directeur de recherche
M. ARNOUX Pierre-Jean, D. Sc., membre et codirecteur de recherche
M. MAC-THIONG Jean-Marc, M. D., Ph. D., membre et codirecteur de recherche M. PARENT Stefan, M. D., Ph. D., membre
M. TILLIER Yannick, Ph. D., membre M. AVRIL Stéphane, Ph. D., membre externe
DÉDICACE
À mes parents, pour la chance que vous m’avez donnée, À ma famille, pour tout le reste, merci.
REMERCIEMENTS
Ce projet de doctorat a été effectué en cotutelle entre l’École Polytechnique de Montréal et le Laboratoire de Biomécanique Appliquée de Marseille (UMRT21 Institut Français des Sciences et Technologies des Transports, de l'Aménagement et des Réseaux/ Aix Marseille Université). Le projet s’est inscrit dans le cadre d’une collaboration liée au Laboratoire international – Imagerie et biomécanique du rachis iLab-Spine, ainsi que dans le cadre de la Chaire CRSNG/Medtronic en biomécanique de la colonne vertébrale. Je remercie tout d’abord mes directeurs de recherche, Dr. Carl-Éric Aubin, Dr. Pierre-Jean Arnoux et Dr. Jean-Marc Mac-Thiong pour leur encadrement, leur sens critique et surtout la confiance qu’ils m’ont accordée. Je voudrais également remercier les membres de mon comité conseil (John Coleman et Yvan Petit) et mentor (Eric Wagnac) du programme de formation MEDITIS pour leurs conseils précieux. Je remercie les membres du jury et rapporteurs pour leur disponibilité et l’intérêt porté à ce projet de recherche. Je remercie Brian Murrell, John Coleman et Jeremy Rawlinson pour leur accueil chaleureux durant le stage MEDITIS chez Medtronic.
Je souhaite également remercier mes collègues actuels et anciens du iLab-Spine, Léo, Maxime, Manon, Marion, Manuel, Aurélie, Juan, Claire et Christiane pour les nombreuses discussions et conseils que vous m’avez apportés. Un grand merci à mes collègues de Polytechnique, Bahe et Franck, mes compagnons de galère, Olivier mon second mentor, Frédérique DB, Nikita, Frédérique DP, Julien G, Julien C, Laure, Viviane, Rany, Sarah… Un autre grand merci à mes collègues et autres membres du LBA, Lucie, Audrey, Damien, Florent, Dorian, Guillermo, Christian, Sanae, Wei… J’ai certainement oublié des prénoms, mais ces années entre les deux laboratoires ont été véritablement un plaisir. Finalement, je remercie tout particulièrement mes proches et toutes les personnes que j’ai pu rencontrer durant cette aventure sur plusieurs continents.
Ce travail de recherche a été́ financé par le Conseil de recherches en sciences naturelles et génie du Canada (Chaire de recherche industrielle avec Medtronic du Canada), le programme de formation MEDITIS (CRSNG) et la fondation A*MIDEX (Aix-Marseille Université Initiative d’Excellence, n° ANR 11-IDEX-0001-02).
RÉSUMÉ
La scoliose est une pathologie qui cause une déformation tridimensionnelle de la colonne vertébrale et de la cage thoracique. Elle peut être d’origine congénitale, neuromusculaire ou dite idiopathique (de cause inconnue). Cette maladie apparait généralement durant l’adolescence et les cas dits « évolutifs » touchent à 90% les filles. La scoliose idiopathique adolescente a une prévalence de 3% à 5% et environ 10% des patients nécessiteront un traitement. Pour des déformations sévères, le principal traitement utilisé est la correction par instrumentation, en général par abord postérieur. Des vis sont alors insérées dans les vertèbres, à travers les pédicules. Elles servent de lien pour appliquer des manœuvres chirurgicales de correction afin d’aligner la colonne dans le plan coronal et transverse, et restaurer les courbes dans le plan sagittal. Des tiges d’instrumentation sont fixées aux vis pour maintenir la correction du rachis. L’objectif des implants est, à court terme, de permettre l’application des manœuvres de correction et de maintenir la correction des déformations scoliotiques et, à long-terme, de rigidifier et stabiliser le rachis par une fusion osseuse. Les vis pédiculaires subissent des efforts importants et variables en intensité et direction tout au long de leur utilisation, ce qui peut entrainer des micro-fractures ou un déchaussement partiel ou total pendant les manœuvres et en période postopératoire, menant à des risques de défaillance. Un bon ancrage biomécanique des vis pédiculaires dans les vertèbres est donc nécessaire pour assurer une correction sécuritaire et durable.
L’ancrage biomécanique des vis pédiculaires dépend de paramètres intrinsèques de la vertèbre (forme et taille des vertèbres, densité et distribution osseuse), donc du patient, mais aussi des techniques chirurgicales d’insertion des vis, comme le choix de la trajectoire d’insertion ou le quantité d’os enlevé au point d’insertion des vis. Toutefois, le design des vis (forme de filets, type de filetage) et le choix de la dimension des implants et de la technique d’insertion (préparation du point d’entrée, diamètre du taraudage ou trajectoire d’insertion) reposent encore principalement sur des principes empiriques et sur l’expérience des chirurgiens. Un certain nombre d’études expérimentales ont permis de déterminer les effets des paramètres les plus importants, mais de par l’aspect destructif et la forte variabilité expérimentale des tests, peu d’études ont pu examiner quantitativement un ensemble de paramètres pertinents. De plus, les
tests expérimentaux pour l’évaluation de la performance d’ancrage des vis pédiculaires se font traditionnellement avec des tests standards d’arrachement via des forces appliquées axialement à la vis, mais cela ne représente qu’un sous-ensemble des forces que les vis pédiculaires subissent lors des manœuvres chirurgicales ou après l’intervention durant des mouvements fonctionnels. L’étude du comportement des vis pédiculaires sous chargements non-axiaux n’est pas standardisée ce qui rend complexe la comparaison des différentes études antérieures. Plusieurs équipes ont étudié le comportement des vis pédiculaires en utilisant la méthode de modélisation par éléments finis. Néanmoins, il n'existe pour l'instant pas de modèle pouvant représenter avec détail le comportement de vis pédiculaires, des structures osseuses et de l'interface de contact lors de sollicitations intraopératoires.
L’objectif général de ce projet doctoral est d’étudier l'influence des choix chirurgicaux et des variations morphologiques des vertèbres sur l'ancrage biomécanique des vis pédiculaires. L’hypothèse que nous souhaitons vérifier est que les paramètres relatifs à la condition physiopathologique du patient et les choix des chirurgiens influencent de façon significative (p<0.05) l'ancrage biomécanique de la vis pédiculaire. Pour cela, nous avons fait le choix de combiner une modélisation détaillée de l’interaction vis-vertèbre à l’acquisition de données expérimentales indispensables pour valider les outils de simulation.
Un modèle par élément finis d’une vertèbre L3 a été développé pour représenter de manière réaliste et détaillée l’interface de contact entre la vis et la vertèbre, incluant une répartition fine des structures osseuses (trabéculaire et corticale) et des propriétés des matériaux élastoplastiques simulant la rupture osseuse. Des simulations de tests d’arrachement axial ont été réalisées afin de déterminer les effets de deux trajectoires d’insertion, deux diamètres de vis, deux longueurs de vis et deux types de filetage. L’étude a permis de montrer que le diamètre des vis a un effet prédominant par rapport aux autres facteurs sur la performance d’ancrage des vis. La meilleure trajectoire d’insertion a été celle qui favorise la proximité avec les parois corticales latérales du pédicule et du corps vertébral. Les vis à filets simples ont eu un meilleur ancrage que les vis à filets doubles. Les profils de fractures étaient tous semblables, avec des ruptures initiales en pointe de vis se propageant le long des vis jusqu’à l’arrachement complet.
L’importance de paramètres spécifiques au patient et liés aux choix chirurgicaux sur la qualité de l’ancrage a été évaluée numériquement en considérant des chargements axiaux et non-axiaux. Les paramètres ainsi étudiés ont été : l’épaisseur de l’os cortical (5e, 50e ou 95e percentile), le niveau vertébral (T3 ou T8), la qualité osseuse (normale ou ostéoporotique), le diamètre des vis pédiculaires (5.5 ou 6.5 mm), l’engagement osseux des vis (unicortical ou bicortical) et enfin la taille de l’élargissement du point d’entrée (EPE) (os cortical intact, EPE minimal et EPE large). Le diamètre des vis avait un effet prédominant (pour une vis 6.5 mm comparé à 5.5 mm, augmentation de 30-35% en raideur initiale et force à l’arrachement dans toutes les directions) dans toutes les directions de chargement. Globalement, l’os cortical était également un paramètre clé dans l’ancrage biomécanique des vis pédiculaires. Cette étude a permis de montrer qu’une baisse globale de densité osseuse de 20% (correspondant à un passage d’une densité normale à une densité ostéoporotique) conduit à une baisse de 30% en raideur initiale et baisse de 20% en force à l’arrachement dans toutes les directions de chargements. Néanmoins, la densité osseuse ne semblait pas être un facteur prédominent dans l’ancrage des vis pédiculaires puisque le diamètre des vis avait des effets supérieurs (+35% sur la force à la rupture).
L’analyse de l’insertion d’une vis dans un trou pré-taraudé d’un diamètre inférieur à celui de la vis a finalement été réalisée numériquement. Deux aspects des phénomènes se produisant lors de l’insertion des vis pédiculaire ont été simulés. Une première simulation d’insertion a été effectuée en insérant les 4 premiers filets de la vis dans un prétaraudage de diamètre de 1 mm inférieur à celui de la vis et en appliquant ensuite un moment autour de l’axe de la vis. L’autre type de simulation a été effectué par une expansion radiale d’un mm d’une vis virtuelle pour atteindre l’équilibre à sa dimension et position finale réelles. L’analyse des contraintes et des forces de contact a montré que les zones d’os trabéculaire entre les filets des vis ou des parois de l’os cortical atteignent des niveaux proches de la limite en déformations et des fractures initiales apparaissent. Des effets irréversibles de fracture osseuse et de précontraintes ont été observés, pouvant conduire à des risques de défaillances lors de chargements subséquents sur la vis. Les zones les plus déformées se trouvent aux alentours de la pointe de vis et dans le canal pédiculaire. Le modèle a également permis de montrer que les champs de contraintes générées par des vis de plus grands diamètres produisent plus de zones de concentration de contraintes et d’initiation de
fractures. De plus, le design des vis à profil cylindrique et à simple filetage produisaient un champ de contraintes plus uniforme et moins de zones d’initiation de fractures.
Un second volet du travail a permis de caractériser expérimentalement le comportement des vis pédiculaires thoracique lors de chargements non axiaux. Les expériences ont été effectuées sur 12 vertèbres cadavériques où deux types de filetage (filets simples ou doubles), deux points d'insertion (médial ou latéral), deux trajectoires d'insertion (horizontale ou oblique) et deux types de chargements (latéral ou crânial) ont été testés pour un total de 24 expériences. Les vis ont été soumises à 4 chargements sinusoïdaux cycliques de 0 à 400N. Les résultats ont montré que le premier cycle de chargement entraînait une forte déformation osseuse (déplacement moyen de la tête de vis de 0.79 mm), qui ensuite s’accumulait progressivement au cours des cycles suivant pour atteindre 1.75 mm de déplacement de la tête de vis en moyenne. Ce phénomène de tassement osseux et de cumul des déformations permanentes est susceptible d’avoir un impact sur la tenue des vis, car il peut conduire à la déformation limite et rupture de l'os. Les chargements latéraux induisaient une déformation osseuse plus importante et plus de risques de déchaussement de vis que les chargements crâniaux. Les vis à filets doubles ont montré une raideur initiale supérieure à celle des vis à filets simples.
Les résultats générés dans cette thèse ont permis de confirmer que des paramètres relatifs à la condition physiopathologique du patient (densité osseuse et épaisseur de l’os cortical) et aux choix des chirurgiens (diamètre et longueur des vis, design de vis, trajectoire d’insertion et quantité d’os cortical rongé à l’insertion) influencent de façon significative (p<0.05) l'ancrage biomécanique de la vis pédiculaire. Néanmoins, l’ensemble des études a été effectué basé sur un modèle générique. Chaque patient a des spécificités géométriques et des qualités osseuses propres pouvant avoir des effets sur l’ancrage biomécanique et les choix préopératoires. Les chalenges pour les prochaines années seraient de se diriger vers une approche de personnalisation des simulations tenant en compte des spécificités de chaque patient.
Ce projet doctoral propose un modèle par éléments finis original et innovant prenant en compte l’interface de contact entre les structures osseuses et un comportement élastoplastique avec modélisation de la fracture osseuse pour décrire la biomécanique de l’interaction
vis-pédiculaire/vertèbre. De plus, ce projet a également permis de proposer un protocole et une méthode d’analyse pour l’étude de vis pédiculaires sous chargements non-axiaux. Les connaissances développées au cours de ce projet doctoral ont permis de fournir des recommandations pratiques pour les cliniciens ainsi que les développeurs d’implants biomédicaux, autant sur les futurs choix de design des vis pédiculaires que les choix de vis et leur placement afin d’obtenir un meilleur ancrage. À long terme, le modèle pourrait être adapté pour analyser plus en détail les caractéristiques spécifiques du patient et être utilisé comme une formation virtuelle ou d'un outil de planification préopératoire.
ABSTRACT
Scoliosis is a pathology that causes a three-dimensional deformation of the spine and rib cage. This disease usually appears during adolescence and “large progression” cases affect females 90% of the time. Adolescent idiopathic scoliosis has a prevalence of 3% to 5%, and around 10% of patients require a treatment. For severe spinal deformities, the main treatment is to surgically correct the spine by instrumentation. Screws are inserted into the vertebrae through the pedicles and are used to apply surgical maneuvers in order to align the column, after which instrumentation rods are attached to stabilize the spine. The short-term goals are to reduce the spinal curvature; the long-term goals are to stiffen the spine and promote arthrodesis. The pedicle screws undergo significant and variable forces during correction maneuvers and also after surgery while the patient undergoes functional movements, which can cause partial or total loosening of the screw construct. A strong connection between the screws and vertebrae is needed to ensure a safe correction.
The biomechanical anchorage of pedicle screws depends on the intrinsic parameters of the vertebrae (shape and size of the vertebrae, bone density and bone distribution), but also on the surgical insertion techniques of screws such as the trajectory or amount of bone removed at the insertion point. However, the design (thread design and type), the choice of the size of the implants, and insertion technique (preparation of the entry point, the diameter or tapping diameter) still depend on empirical principles and on the surgeon’s experience. Many studies have determined the effects of the main parameters affecting the pedicle screw anchorage, but due to the destructive aspects and the high experimental variability, only a few were able to compare relevant parameters. Moreover, most experimental tests are done with axial pullout forces, which do not fully represent the possible forces that are applied on the screws during surgical maneuvers or postoperatively. Non-axial loading tests are yet not standardized, which makes comparison between studies more complex. Many studies have investigated pedicle screw behaviour using finite element modelling. However, there is currently no model refined enough that can represent in detail the behaviour of pedicle screws, bone structures, and the contact interface during intraoperative loadings.
The overall objective of this doctoral project is to study the influence of surgical choices and morphological variations of vertebrae on the anchorage of pedicle screws. The investigated hypothesis is that the parameters relative to the patient and to a surgeon’s choices significantly affect (p<0.05) the biomechanical anchorage of pedicle screws. A combined approach of detail numerical modeling of the screw bone interaction and experimental tests has been used.
A first biomechanical analysis on an L3 vertebra model was first carried out. A finite element model of a vertebra was developed to realistically represent the contact interface between the screw and the vertebra, including a detailed distribution of bone structures (cortical and trabecular) with elastoplastic material properties simulating bone failure. Axial pullout tests were performed in order to determine the effect of two insertion trajectories, two screw diameters, two screw lengths, and two thread types. This study showed that the screw diameter is the predominant factor affecting pedicle screw anchorage performance. The best insertion trajectory was the one promoting the proximity to the lateral cortical wall of the pedicle and vertebral body. The single-threaded screw showed a better anchorage compared to the dual-thread screw. The failure patterns were all similar, with initial fractures around the screw tip, which then propagated along the screw shaft until total pullout.
The effects of patient-specific parameters (thickness of the cortical bone (5th, 50th or 95th percentile), vertebral level (T3 or T8), and bone density (normal or osteoporotic)) and parameters related to surgical choices (pedicle screw diameter (5.5 or 6.5 mm), bone engagement scenarios (unicortical or bicortical), and size entry point enlargement (EPE) (no, small and large EPE)) on screw anchorage performance under axial and non-axial loading conditions were assessed using the same finite element model. The screw diameter was the predominant factor for screw anchorage for all loading directions (increase of 30-35% in initial stiffness and force to failure for a 6.5 mm screw compared to a 5.5 mm screw). Overall, the cortical bone was also a key parameter in the biomechanical anchorage of pedicle screws. This study also showed that a 20% bone density decrease (corresponding to a transition from a normal density to an osteoporotic density) leads to a 30% decrease in initial stiffness and 20% decline in strength to pulling loads in all directions. However, the bone density was not the predominant factor as the screw diameter had superior effects on the pedicle screw anchorage (35% increase of the force to failure).
The effects of the insertion of a screw into a pre-tapped hole of a smaller diameter than the screw were analyzed. The model was adapted to simulate two aspects of the phenomena occurring during the insertion of the pedicle screw. A first simulation was performed by placing the first 4 threads of the screw in a pre-tapped hole of a diameter of 1 mm below the screw and a moment around the axis of the screw was applied at the screw head to simulate the screw insertion. A second simulation was performed by applying a 1 mm axial expansion on a smaller already inserted initial screw. The stress and contact force analysis showed that the trabecular bone area in between screw threads or the cortical wall reach stress levels close to the failure limit, and early fractures occurred. Irreversible effects of bone failure and pre-stress were observed, which could lead to weaker areas after subsequent loads on the screw. The most deformed areas and constraints were around the screw tip and in the pedicle channel, and when using 6.5 mm screw diameter. The most strained area was located around the screw tip and in the pedicle isthmus. The model also demonstrated that the stress fields generated by screws with larger diameters produced more stress concentration zones and initiated more bone fractures. In addition, cylindrical profile and single-thread designs resulted in more uniform stress distribution and fewer early fracture zones.
An experimental characterization of thoracic pedicle screw behavior under non-axial loading conditions was also performed. The experiments were performed on 12 cadaveric vertebrae where two thread types (single or dual), two insertion points (medial or lateral), two insertion paths (horizontal or oblique), and two types of loads (lateral or cranial) were tested in a total of 24 experiments. The screws were loaded 4 sinewave cycles from 0 to 400N. The results showed that the first load cycle resulted in a high bone deformation (with an average screw head displacement of 0.79 mm), which then gradually accumulated in the following cycles to reach on average 1.75 mm in bone compaction. The bone compaction and accumulation of permanent deformations may lead to the deformation limit and early failure of the bone. The lateral loads induced higher bone deformation and a greater risk of screw loosening than the cranial loads. Dual-thread screws showed a higher initial stiffness than single-thread screws.
The findings of this thesis confirm that patient-specific parameters related to the spine (bone density, cortical bone thickness) and surgeon’s choices (screw diameter, length, screw design, insertion strategy and amount of cortical bone removed) significantly impact (p<0.05) the biomechanical anchorage of pedicle screws. However, the results were based on a generic model. Every patient has specific bone geometry and bone quality that can have effects on the anchorage of pedicle screws and preoperative choices. Future challenges would be to head towards a customization approach of the simulations to take into account each patient specificities.
This project enabled the development of an original comprehensive finite element model, which takes into account the contact interface between the screw and the bone structures, and includes elastoplastic material properties that can simulate bone failure. Moreover, this project also introduced an experimental protocol to investigate the behavior of pedicle screws under non-axial loadings. The numerical and experimental tools have made possible the characterization of pedicle screw pullout mechanism during axial loading. The developed knowledge provides industrial recommendations on future pedicle screw design choices and also and clinical recommendations on the screw choices and placements that would ensure a better anchorage. In the future, this tool could be used to assist preoperative planning and also be associated with a computer-assisted surgery system to treat customized and complex cases.
TABLE DES MATIÈRES
DÉDICACE ... III REMERCIEMENTS ... IV RÉSUMÉ ... V ABSTRACT ... X TABLE DES MATIÈRES ... XIV LISTE DES TABLEAUX ... XVIII LISTE DES FIGURES ... XIX LISTE DES SIGLES ET ABRÉVIATIONS ... XXVI
INTRODUCTION ... 1
CHAPITRE 1 REVUE DES CONNAISSANCES ... 5
1.1 Anatomie descriptive et fonctionnelle de la colonne vertébrale ... 5
1.1.1 Colonne vertébrale ... 5
1.1.2 Vertèbres ... 6
1.1.3 Composition osseuse des vertèbres ... 8
1.2 Scoliose ... 11
1.3 Correction chirurgicale de la scoliose par instrumentation ... 13
1.3.1 Les vis pédiculaires ... 13
1.3.2 Étapes d’une chirurgie d’instrumentation ... 16
1.3.3 Les choix chirurgicaux d'une correction du rachis par instrumentation... 19
1.3.4 Risques liés à l’utilisation des vis pédiculaires ... 27
1.4 Études biomécaniques sur l’ancrage biomécanique des vis pédiculaires ... 28
1.4.2 Apports des études numériques ... 31
1.5 Les limites générales ... 35
CHAPITRE 2 PROBLÉMATIQUE ET OBJECTIFS ... 37
2.1 Question de recherche ... 37
2.2 Hypothèses de recherche ... 38
2.3 Objectifs ... 39
CHAPITRE 3 ANALYSE BIOMÉCANIQUE DE TRAJECTOIRES, DIMENSIONS ET TYPES DE VIS PÉDICULAIRES POUR MINIMISER LES RISQUES D’ARRACHEMENT 41 3.1 Article #1 : Minimizing Pedicle Screw Pullout Risks: A Detailed Biomechanical Analysis of Screw Design and Placement. ... 41
3.1.1 Résumé de l’article ... 41
3.1.2 Déclaration de conflit d’intérêts ... 42
3.1.3 Abstract ... 43 3.1.4 Introduction ... 44 3.1.5 Methods ... 45 3.1.6 Results ... 48 3.1.7 Discussion ... 49 3.1.8 Conclusion ... 52 3.1.9 References ... 53 3.1.10 Figures ... 56 3.1.11 Tables ... 61
3.2 Étude de stabilité, sensibilité et vérification du modèle ... 61
CHAPITRE 4 COMPORTEMENT DES VIS PÉDICULAIRES THORACIQUES LORS DE CHARGEMENTS NON AXIAUX ... 67
4.1.1 Résumé de l’article ... 68
4.1.2 Déclaration de conflit d’intérêts ... 69
4.1.3 Abstract ... 70 4.1.4 Introduction ... 71 4.1.5 Methods ... 72 4.1.6 Results ... 74 4.1.7 Discussion ... 76 4.1.8 Conclusion ... 78 4.1.9 References ... 79 4.1.10 Figures ... 81 4.1.11 Tables ... 85
4.1.12 Supplemental PowerPoint Slides ... 87
CHAPITRE 5 LES EFFETS MORPHOLOGIQUES ET OSSEUX DES VERTÈBRES THORACIQUES SUR L’ANCRAGE BIOMÉCANIQUE DES VIS PÉDICULAIRES ... 90
5.1 Article #3 : Thoracic pedicle screw fixation under axial and perpendicular loadings: a numerical analysis ... 90
5.1.1 Résumé de l’article ... 90
5.1.2 Déclaration de conflit d’intérêts ... 91
5.1.3 Abstract ... 93 5.1.4 Introduction ... 93 5.1.5 Methods ... 94 5.1.6 Results ... 97 5.1.7 Discussion ... 99 5.1.8 Conclusion ... 101 5.1.9 References ... 101
5.1.10 Figures ... 103
5.1.11 Tables ... 108
5.2 Effet de la qualité osseuse sur l’ancrage des vis pédiculaires thoraciques ... 110
5.2.1 Introduction ... 110
5.2.2 Méthodes ... 110
5.2.3 Résultats ... 111
CHAPITRE 6 ANALYSE DES PRÉCONTRAINTES DANS L’OS LORS DE L’INSERTION D’UNE VIS DANS UN PRÉ-TARAUDAGE DE DIAMÈTRE INFÉRIEUR ... 116
6.1 Introduction ... 116
6.2 Méthodes ... 116
6.3 Résultats ... 119
6.3.1 Simulation d’insertion ... 119
6.3.2 Simulations d’expansion radiale ... 123
CHAPITRE 7 DISCUSSION GÉNÉRALE ... 127
7.1 Interprétation des résultats et recommandations ... 127
7.2 Validité du modèle numérique ... 132
7.3 Discussion méthodologique ... 135
7.4 Perspectives ... 138
CONCLUSION ... 140
BIBLIOGRAPHIE ... 143
LISTE DES TABLEAUX
Tableau 3-1 : Material properties of the cortical and trabecular bone used in the FEM 15 ... 61 Tableau 3-2 : Vérification des données expérimentales avec des données de la littérature (Abshire
et al., 2001, Inceoglu et al., 2006, Santoni et al., 2009, Mehta et al., 2012). ... 66
Tableau 4-1 : Description of the design of experiment, bone density, anatomical features (Sp.: Specimen, BD: Bone Density, PW: Pedicle Width). ... 85 Tableau 4-2 : Results of mechanical indices extracted from F-D curves (IS: Initial Stiffness, DE: Dissipated Energy, D400: Displacement at 400N, Ra.: Ratchet, AC: Accumulated Ratchet after 4 cycles, x: Bone fracture, c.: cycle number). ... 86 Tableau 5-1 : Three cortical bone thickness scenarios of different regions of the vertebra. (VB: Vertebral body, STP: Spinous and transverse processes, EP: Entry point, P_Sup: Superior pedicle wall, P_Inf: Inferior pedicle wall, P_Med: Medial pedicle wall, P_Lat: Lateral pedicle wall). ... 108 Tableau 5-2 : Material properties of the cortical and trabecular bone used in the FEM [28]. ... 109 Tableau 5-3 : Range and average of initial stiffness and force to failure numerically obtained by loading directions. ... 109 Tableau 5-4 : Propriétés mécaniques normales et estimation pour condition ostéoporotique. .... 111 Tableau 7-1 : Effet de la variation de la densité osseuse sur la raideur initiale et la force à la rupture du modèle et dans la littérature ... 133
LISTE DES FIGURES
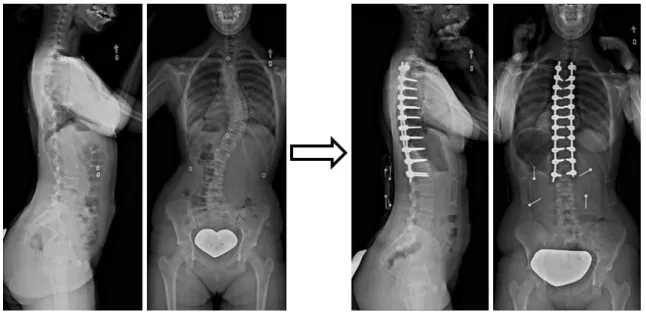
Figure 1-1 : Le rachis sain – vue latérale (gauche) et antéro-postérieure (droite). Adaptée de Gray, H. (1918). Anatomy of the human body. Philadelphia : Lea & Febiger. Consulté le 24 mars 2015, tiré de http://www.bartleby.com/107/ (Gray et al., 1918). ... 6 Figure 1-2: Structure vertébrale – a) thoracique et b) lombaire. Adaptée de Gray, H. (1918). Anatomy of the human body. Philadelphia : Lea & Febiger. Consulté le 24 mars 2015, tiré de http://www.bartleby.com/107/ (Gray et al., 1918). ... 7 Figure 1-3 : Système articulaire vertébral – a) thoracique et b) lombaire. Adaptée de Gray, H. (1918). Anatomy of the human body. Philadelphia : Lea & Febiger. Consulté le 24 mars 2015, tiré de http://www.bartleby.com/107/ (Gray et al., 1918). ... 8 Figure 1-4: Composition osseuse vertébrale. Coupe dans le plan sagittal d’une vertèbre lombaire. Adaptée de Gray, H. (1918). Anatomy of the human body. Philadelphia : Lea & Febiger. Consulté le 24 mars 2015, tiré de http://www.bartleby.com/107/ (Gray et al., 1918) et de Wikipédia, l'encyclopédie libre, page consultée le 10 avril 2015 (http://goo.gl/4enYtG). ... 9 Figure 1-5 : Différentes cartographies des zones de plus faible densité osseuse et régions osseuses les plus faibles. Vues sagittale et transverse de A : Keller et al. (1992), B : Keller et al. (1989), C : Banse et al. (2001), D : Antonacci et al. (1997), et E : Chen et al. (2008). ... 10 Figure 1-6 : Trabécules et lignes de force sur une coupe coronale (A) et sur une coupe sagittale (B) du corps vertébral. Adaptée avec permission de Heggeness et al. (1997). ... 11 Figure 1-7 : Mesure de l’angle de Cobb d’une double scoliose (lombaire et thoracique). Adaptée de Wikipédia, l'encyclopédie libre, page consultée le 10 avril 2015 (http://goo.gl/lCEQqY). ... 12 Figure 1-8 : Différences géométriques entre vis à profil conique et à filet double dans la zone distale (a) et vis à profil cylindrique à filet simple (b). ... 14 Figure 1-9 : Visualisation simplifiée de l’emplacement d’une vis pédiculaire dans une vertèbre thoracique. Adaptée de Gray, H. (1918). Anatomy of the human body. Philadelphia : Lea &
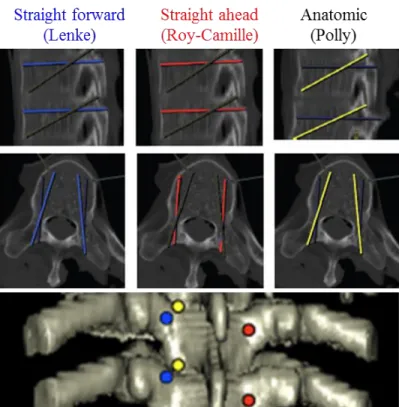
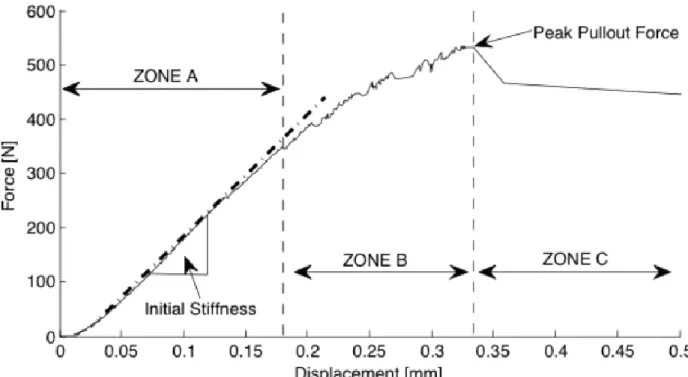
Febiger. Consulté le 24 mars 2015, tiré de http://www.bartleby.com/107/ (Gray et al., 1918). ... 15 Figure 1-10 : Description et nomenclature des vis pédiculaires. Cet exemple est une vis à tête multiaxiale à filet double « conique » dans la partie distale de la vis. ... 15 Figure 1-11 : Types de profil de filet de vis pédiculaire. Tiré de ISO-6475 (1989). ... 16 Figure 1-12 : Rôle structurel, transfert des charges subies par les montages d’instrumentation et rôle de la fusion osseuse en fonction du temps. Adaptée de Benzel (2001) et de White et al. (1990). ... 16 Figure 1-13 : Étapes de la technique de localisation et insertion de vis. Adapté avec permission de Gaines (2000) 1 : localisation; 2 : dégagement et élargissement du point d’entrée; 3 : passage de la sonde; 4 : taraudage; 5 : insertion de la vis. ... 18 Figure 1-14 : Radiographies sagittale et frontale préopératoire (gauche) et postopératoire (droite) d'une colonne vertébrale atteinte de scoliose. ... 19 Figure 1-15 : Mesure de la largeur transverse de l’isthme pédiculaire. Adaptée de Gray, H. (1918). Anatomy of the human body. Philadelphia : Lea & Febiger. Consulté le 24 mars 2015, tiré de http://www.bartleby.com/107/ (Gray et al., 1918). ... 21 Figure 1-16 : Déformation des parties postérieures (gauche) et du corps vertébral (droite) due à la scoliose. Adaptée avec permission de White et al. (1990), Rainaut (1984) et Liljenqvist et al. (2002). ... 21 Figure 1-17 : Différentes stratégies de trajectoire d’insertion et localisation des points d’entrée. Adaptée avec permission de Dhawan et al. (2008). ... 24 Figure 1-18 : Schéma de la stratégie d’insertion par perforation latérale du corps vertébral dite « in-out-in ». ... 24 Figure 1-19 : Courbe de Force-Déplacement typique et indices mécaniques extrait. ... 30 Figure 1-20 : Exemple de conditions de chargement pour tests biomécaniques d’ancrage de vis pédiculaires. ... 31 Figure 1-21 : Exemples de modèles utilisés pour l’étude de l’ancrage de vis pédiculaires (sauf Wirth et al. (2010) qui représente une vis fémorale). Reproduit avec permissions. ... 34
Figure 2-1 : Organisation des chapitres et objectifs traités. ... 40 Figure 3-1 : Meshed L3 vertebra with a cylindrical single-lead thread screw (length 50mm, diameter 8.5 mm) inserted. Cortical regional thickness, elements used and mesh distribution shown. The bone was meshed with tetrahedral elements while the screw parts were meshed with triangular surfacic elements. ... 56 Figure 3-2 : Multi-axial screws and screw trajectories superimposed on the vertebra shape. a) Cylindrical single-lead thread on top and dual-lead thread with doubled pitch in the pedicle region and the inner diameter is slightly conical below. b) In the sagittal plane (right view), the screws were parallel to the upper endplate of the vertebral body. In the transverse plane (left view), in the Straight Forward trajectory the screw was parallel to the sagittal plane of the vertebral body, while in the Anatomic trajectory the screw was inserted along the transverse orientation of the pedicle. The arrows show the direction of the pullout force applied. ... 57 Figure 3-3: Generic load-displacement curve from the simulated pullout test. The curve is divided in a first linear elastic zone (A), a second elasto-plastic zone with bone damage (B) and a third zone after the total pullout of the screw (C). ... 58 Figure 3-4 : Peri-implant Von Mises stress distribution in the trabecular bone structure along the 6.5mm*50mm single-lead thread screw (top) and dual-lead thread screw (bottom) inserted in Straight Forward trajectory loaded with an axial force at 370N. Higher stress areas are observable around the screw tip and in the pedicle isthmus area (stress scale bars are at same level). ... 59 Figure 3-5 : Pareto chart for the initial stiffness (a) and peak pullout force (b). The standardized effects estimates (absolute values) are plotted and classified in order of influence on the model in terms of “t value”. Coupled effects are noted “a by b” where “a” and “b” are the factor denomination. Threshold level of significance was set at P = 0.01. ... 60 Figure 3-6 : Box plot distribution of initial stiffness (top row) and peak pullout force (bottom row) for the 4 analyzed parameters: (1) type of screw; (2) screw diameter; (3) screw length; (4) screw trajectory. The best anchorage was obtained with the cylindrical single-lead thread screw of 8.5 mm diameter, 50 mm length with a Straight Forward trajectory. ... 60
Figure 3-7 : Modèle simplifié représentatif utilisé pour l’étude de convergence : a) géométrie; b) maillage avec vis pleine (tétraèdre); c) maillage avec vis en éléments coques. ... 63 Figure 3-8 : Étude de sensibilité sur la taille de maillage des structures osseuses (en zone proche de la vis et en zone éloignée de la vis) sur les résultats de force-déplacement et taille du pas de temps. ... 63 Figure 3-9 : Étude de sensibilité sur le type de maillage et propriétés des matériaux de la vis sur les résultats de force-déplacement et taille du pas de temps (T4 : tétraèdre à 4 nœuds; T3 : triangle à 3 nœuds). ... 64 Figure 3-10 : Modèle d’interface de contact de type 7 (point-surface) décrit par le logiciel Radioss v11 et description du « gap ». ... 64 Figure 3-11 : Étude de sensibilité sur la taille du gap de l’interface de contact sur les résultats de force-déplacement. ... 65 Figure 3-12 : Étude de sensibilité sur le coefficient de friction de l’interface de contact sur les résultats de force-déplacement. ... 65 Figure 3-13 : Étude de sensibilité sur le temps de simulation sur les résultats de
force-déplacement. ... 66 Figure 4-1: Three tested independent variables of the 8-test factorial DOE (Box, Hunter & Hunter). A – Screw type: conical dual-lead thread with doubled pitch in the distal part of the shaft and cylindrical single-lead thread. B – Loading direction. The arrows show the directions of the lateral and cranial forces. C – Screw trajectory: in the transverse plane, the screws were parallel to the sagittal plane or along the transverse orientation of the pedicle and in the sagittal plane, the screws were parallel to the upper endplate of the vertebral body or aiming downward. ... 81 Figure 4-2 : Hydraulic testing machine (MTS 370.02 –15 kN) and experimental setup of a cranial loading case. Casted vertebra in resin is rigidly fixed on a bi-axial table. Markers for displacement tracking is attached to the screw head. ... 82 Figure 4-3 : Typical Force-Displacement curve showing 4 full loading and unloading cycles and the mechanical indices extracted. ... 83
Figure 4-4 : Mean ± 0.95 confidence interval whisker plots of Ratchet values (mm) at 0N after each loading-unloading cycle. *: Statistical significance (p<0.05). ... 84 Figure 4-5 : A) Movement envelope of screw following markers tracking during a lateral loading test, and B) post-experimental CT scan of a vertebra after a lateral loading test. Screws were removed to avoid flashing effect to observe the permanent deformation. Left screw virtually placed to display insertion trajectory. ... 84 Figure 5-1 : Meshed model of T8, with element removal allowing to see bone thickness distribution and bone/screw interface. It features a 95th percentile cortical bone thickness with a 6.5 mm diameter 40 mm length screw. The three enlarged figures above show posterior views of screw insertion and bone removal due to screw head hubbing for the three simulated entry point enlargement (EPE) scenarios. ... 104 Figure 5-2 : Force-displacement (F-D) curves of axial and non-axial loadings of T8 with 50th
cortical bone thickness, 5.5 mm screw diameter, unicortical (40 mm) engagement and small EPE. The initial stiffness (IS, ratio of force and displacement variation) and force to failure (FtF) are shown for the axial F-D curve. ... 105 Figure 5-3 : Bar plot distribution of initial stiffness (a) and peak pullout force (b) for the five analyzed parameters in axial loading (mean ± σ). Uni.: Unicortical; Bi.: Bicortical; EPE: Entry point enlargement; *: Statistical difference. ... 106 Figure 5-4 : Bar plot distribution of initial stiffness (a) and peak pullout force (b) for the five analyzed parameters in non-axial loading (mean ± σ). Uni.: Unicortical; Bi.: Bicortical; EPE: Entry point enlargement; *: Statistical difference. ... 107 Figure 5-5 : Von Mises Strain distribution for the 5 loading directions (T3, 5th percentile cortical thickness, 5.5 mm diameter, 40 mm length screw with large (3 mm) entry point enlargement). ... 108 Figure 5-6 : Courbes de Force-Déplacement typique obtenu numériquement des 5 cas de chargement. Comparaison des comportements entre densité normale (courbes pleines) et densité ostéoporotique (courbes pointillées). ... 112
Figure 5-7 : Moyenne ±σ et comparaison par tests de Student appariés (* : différence significative (p < 0.01)) entre densité osseuse normale et ostéoporotique pour des chargements axiaux. Baisse de 29% en raideur initiale et de 19% en force à la rupture. ... 112 Figure 5-8 : Moyenne ±σ et comparaison par tests de Student appariés (* : différence significative (p < 0.01)) entre densité osseuse normale et ostéoporotique pour des chargements non axiaux. Baisse de 28% en raideur initiale et de 23% en force à la rupture. ... 113 Figure 5-9 : Diagrammes de Pareto du plan d’expériences des chargements axiaux pour raideur initiale (gauche) et force à la rupture (droite) ... 114 Figure 5-10 : Diagrammes de Pareto des plans d’expériences des chargements non-axiaux pour raideur initiale (gauche) et force à la rupture (droite) ... 114 Figure 5-11 : Contraintes de Von Mises du l’os trabéculaire (A : chargement axial, B : Caudal, C : Crânial, D : Médial, E : Latéral). ... 115 Figure 6-1 : Modèle et conditions aux limites pour la simulation d’insertion de vis. ... 117 Figure 6-2 : Modèle et conditions aux limites pour la simulation d’expansion radiale nodale de 0.5 mm. ... 118 Figure 6-3 : Chronologie et champs de contraintes de Von Mises lors de la simulation d’insertion de vis. ... 120 Figure 6-4 : Direction des forces de contact appliquées aux nœuds de l’os trabéculaire (la visualisation ne montre pas les valeurs de force) lors de l’insertion de vis. ... 121 Figure 6-5 : État final de la simulation d’insertion et trace laissée par la vis en fin d’insertion. . 121 Figure 6-6 : Couple d’insertion résultant mesuré lors de l’enfoncement de la vis par rotation. .. 122 Figure 6-7 : Mesure de la déformation dans la zone pédiculaire sur les murs du cortex latéral et médial. ... 123 Figure 6-8 : Contraintes de Von Mises dues à une expansion radiale de 0.5 mm. F.D : Filet double, F.S : Filet Simple, Ø : Diamètre, L : Longueur. ... 124 Figure 6-9 : Agrandissement de la zone osseuse médiale en vue transverse d’une vis à profil cylindrique, filet simple, diamètre de 8.5 mm et longueur de 50 mm. La vue A représente les
forces de contact s’appliquant à l’os trabéculaire et la vue B représente une superposition des forces de contact et contraintes de Von Mises générées. ... 125 Figure 7-1: Comparaison de distribution de contrainte en pointe de vis lors d’un chargement axial obtenu par simulation (A) et par mesure par photoélasticité (B). Adaptée avec permission de Fakhouri et al. (2011). ... 131 Figure 7-2 : Mesure de la déformation dans la zone pédiculaire sur les murs du cortex latéral et médial et mesures expérimentales dans les mêmes régions anatomiques d’un cas spécifique tiré de l’étude de Inceoglu et al. (2007). ... 134
LISTE DES SIGLES ET ABRÉVIATIONS
MEDITIS Programme de formation : Mentorat, Échanges, Développement, Innovation, Transdisciplinarité en Ingénierie de la Santé
LBA Laboratoire de Biomécanique Appliquée AMU Aix-Marseille Université
IFSTTAR Institut Français des Sciences et Technologies des Transports, de l'Aménagement et des Réseaux
MEF Méthode Éléments finis FEM Finite Element Method ANOVA Analyse de la Variance BMD Bone Mineral Density
CT Computed Tomography
DOE Design of Experiment σ Contrainte (N/m2)
ε Déformation
εmax Déformation maximale (rupture)
E Module de Young ou Module élastique ν Coefficient de Poisson
ρ Densité (Kg/m3)
INTRODUCTION
La scoliose est une pathologie qui conduit à une déformation tridimensionnelle de la colonne vertébrale et de la cage thoracique. Elle peut être d’origine congénitale, neuromusculaire ou dite idiopathique (de cause inconnue). Cette pathologie peut conduire à des douleurs chroniques ainsi que des troubles neurologiques, cardiaques et respiratoires. La scoliose idiopathique adolescente a une prévalence de 3% à 5% et environ 10% des personnes touchées nécessiteront un traitement (Asher et al., 2006). Pour des déformations modérées, un suivi régulier et une correction par corset sont préconisés (Clin, 2010). Pour des déformations sévères, le principal traitement utilisé est la correction par instrumentation et fusion. Des vis ou des crochets sont utilisés comme liens d’ancrage avec les vertèbres afin d’y appliquer des manœuvres chirurgicales pour rétablir l’alignement de la colonne vertébrale dans le plan coronal, détordre le rachis dans le plan transverse tout en visant un équilibre des courbes physiologiques dans le plan sagittal. Des tiges d’instrumentation sont utilisées pour stabiliser le montage (DeWald, 2003) permettant ainsi une fusion osseuse. Il existe essentiellement deux types d'implants (vis pédiculaires ou antérieures et crochets) et de nombreuses techniques d'instrumentation. Daffner et al. (2010) ont relevé que 80% des corrections de scolioses idiopathiques adolescentes sont traitées par approche postérieure. A ce jour, les crochets sont rarement utilisés dans les cas de chirurgies par approche postérieure (Lonner et al., 2009). De plus, Liljenqvist et al. (2002) et Kim et al. (2004) ont montré que les montages par vis pédiculaires ont un plus grand pouvoir de correction que les montages avec crochets.
Les vis pédiculaires subissent des efforts importants, en intensité et orientation pouvant aller jusqu’à 500 N et 5 N.m durant les manœuvres d’instrumentation chirurgicale (Salmingo et al., 2012, Wang et al., 2012) ainsi qu’après l’opération lors de mouvements fonctionnels (pouvant aller jusqu’à 400 N et 4 N.m (Rohlmann et al., 1996, Rohlmann et al., 1997)), ce qui peut entrainer un déchaussement partiel ou total des implants ou fracture de l’os autour de la vis. Le taux de déchaussement des vis est entre 0.81% et 2.8% du total des vis insérées (Hicks et al., 2010, Galbusera et al., 2015) mais peut entrainer de graves complications compte tenu des éléments anatomique voisins (Wagner et al., 2011). Un ancrage solide des vis dans les vertèbres est donc nécessaire pour effectuer une correction sécuritaire et durable.
Les vis sont composées d’un axe fileté et d’une tête de vis adaptée pour pouvoir les fixer aux tiges d’instrumentations. Il existe de nombreux designs de têtes de vis, de types de filets et diverses dimensions (diamètre et longueur) pour s’adapter à la taille des vertèbres. Lors des chirurgies, le point d’entrée est localisé suivant des repères anatomiques (Kim et al., 2005) et les vis sont insérées dans les pédicules après avoir été pré-taraudés (Gaines, 2000). L’ancrage des vis dépend des paramètres intrinsèques de la vertèbre (forme et taille des vertèbres, densité et répartition de l’os cortical/trabéculaire), donc du patient, mais aussi des techniques chirurgicales d’insertion des vis (choix du point d’entrée, diamètre du taraudage, élargissement du point d’entrée pour assoir la tête de vis, trajectoire d’insertion) et du type et dimensions des vis choisies. Néanmoins, le choix des vis et les stratégies d’insertion reposent encore principalement sur des principes empiriques et sur l’expérience des chirurgiens (Aubin et al., 2007, Dhawan et
al., 2008, Shea et al., 2014).
Un certain nombre d’études expérimentales ont permis de déterminer indépendamment les effets du diamètre des vis (Wittenberg et al., 1993, Brantley et al., 1994, Cho et al., 2010, Chou et al., 2014), des longueurs de vis (Krag et al., 1989, Skinner et al., 1990, Bezer et al., 2012), de la forme des filets (Lill et al., 2006, Krenn et al., 2008, Cho et al., 2010, Mehta et al., 2012), des techniques d’insertion (Paik et al., 2012, Kang et al., 2014) ou le profil des vis (Kwok et al., 1996, Abshire et al., 2001, Hsu et al., 2005, Chao et al., 2008). Les effets des paramètres morphologiques et osseux des vertèbres, tels que la taille des pédicules (Chou et al., 2014), la qualité osseuse (Halvorson et al., 1994, Chapman et al., 1996, Okuyama et al., 2001, Hackenberg
et al., 2002) ont également été expérimentalement quantifiés sur des vertèbres cadavériques.
Néanmoins, de par l’aspect destructif des tests et la forte variabilité des spécimens et des conditions des tests, peu d’études ont pu évaluer comparativement l’ensemble de ces paramètres.
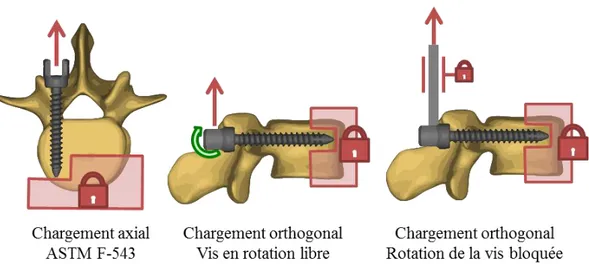
Les tests d’évaluation de la performance de l’ancrage des vis pédiculaires ont principalement été effectués en arrachement (pull out) selon l’axe longitudinal de la vis (ASTM F-543 (2009)). Cependant, ces tests ne représentent pas l’ensemble des forces que les vis pédiculaires subissent lors des manœuvres chirurgicales. L’étude du comportement des vis pédiculaires sous
chargements non-axiaux n’est pas standardisée, ce qui rend la comparaison des différentes études antérieures complexe, voire impossible.
Plusieurs équipes ont étudié le comportement de l’ancrage des vis pédiculaires en utilisant la méthode de modélisation par éléments finis. Beaucoup d'études se sont concentrées sur le rôle structurel et fonctionnel d'un montage et ont modélisé les vis pédiculaires comme étant fusionnées aux vertèbres (Rohlmann et al., 1999, Fan et al., 2010, Rohlmann et al., 2010, Gornet
et al., 2011). Liu et al. (1998) et Chen et al. (2003) ont été les premiers à proposer l’utilisation
d’un modèle par éléments finis avec une interface de contact entre un implant antérieur et une vertèbre et ont permis de montrer les effets à l’échelle vertébrale des paramètres tels que la longueur ou le diamètre des vis avec des modèles simplifiés quant à la représentation des implants. Par la suite, Zhang et al. (2004), Hsu et al. (2005), Kourkoulis et al. (2009) et Chatzistergos et al. (2010) ont proposé des modèles simplifiés de pédicules ou de blocs synthétiques et ont étudié les effets géométriques des vis (longueur, diamètre et type de filet) ainsi que les effets de la densité osseuse sur l'interface de contact dans les cas de chargements axiaux seulement. Ces modèles ont permis de montrer les contraintes générées par la géométrie des filets et démontrer l’importance du diamètre et de la longueur des vis pédiculaires. Les propriétés matériaux utilisées pour ces modèles représentaient des comportements élastiques linéaires, et donc pas les phénomènes d’endommagement et de rupture osseuse. Par la suite, d’autres modèles de Kim et al. (2010), Wang et al. (2014) et Pfeiffer et al. (2014) avec des géométries plus détaillées et des lois de comportement élasto-plastique pour les propriétés matériaux ont permis d’étudier l’influence de la quantité et de la zone d’application de ciment pour les techniques d’augmentation. Néanmoins, ces modèles ne représentent pas la différence entre l’os trabéculaire et cortical, ni les variations d’épaisseur de l’os cortical, ceci ne permettant pas de comprendre le rôle structurel de l’os cortical. Wagnac et al. (2010) ont proposé un modèle à géométrie très détaillée d'une vertèbre lombaire où ils ont montré la faisabilité de simuler l'arrachement d'une vis générique en prenant en compte la friction à l’interface os-implant, la présence d’os cortical et trabéculaire, et enfin en introduisant un comportement mécanique plus complexe de type élastoplastique avec prise en compte de la rupture pour l’os cortical et trabéculaire. Ce modèle est une déclinaison du modèle SM2S (pour «Spine Model for Safety and Surgery») développé conjointement par le Laboratoire de Biomécanique Appliquée de Marseille,
l’École de technologie supérieure (Fradet, 2014) et l’École Polytechnique de Montréal (El-Rich et al., 2009).
Ce projet doctoral vise à mieux comprendre et documenter le comportement biomécanique de l’interface os-vis pédiculaire sous différents modes de chargement afin d’orienter le choix et le positionnement optimal des vis pour réduire les risques de déchaussement lors des manœuvres chirurgicales et des mouvements fonctionnels subséquents.
Cette thèse se divise en sept chapitres. Suite à une revue des connaissances (Chapitre 1), la problématique et les objectifs du projet sont définis au Chapitre 2. Ces objectifs sont réalisés à l'aide de trois articles présentés dans les Chapitre 3, Chapitre 4 et Chapitre 5, suivis d’une section (5.2) et d’un chapitre complémentaire (Chapitre 6) portant sur l’étude des paramètres influant sur l’ancrage biomécanique des vis pédiculaires et la description du comportement osseux à l’interface os/implant. La thèse se termine par une discussion générale (Chapitre 7) du projet et une conclusion ayant pour but de fournir des recommandations aussi bien cliniques que d’aspect biomécanique.
CHAPITRE 1
REVUE DES CONNAISSANCES
1.1 Anatomie descriptive et fonctionnelle de la colonne vertébrale
La colonne vertébrale (ou rachis) peut être décrite comme un empilement de structures osseuses appelées vertèbres. Ses principales fonctions sont de supporter et d’assurer la mobilité de la tête et du tronc, ainsi que de transmettre au bassin les charges du tronc et de la tête (et réciproquement). Enfin, la colonne assure une protection de la moelle épinière des agressions mécaniques et permet un équilibre postural statique et dynamique.
1.1.1 Colonne vertébrale
La colonne vertébrale saine est rectiligne dans le plan frontal. Dans le plan sagittal, le rachis présente plusieurs courbures (lordose et cyphose) qui correspondent à 4 différentes régions (Figure 1-1) :
Le rachis cervical qui comprend 7 vertèbres cervicales (C1 à C7).
Le rachis thoracique qui comprend 12 vertèbres thoraciques (T1 à T12).
Le rachis lombaire qui comprend 5 vertèbres lombaires (L1 à L5).
Le sacrum qui comprend 5 vertèbres sacrées soudées entre elles (S1 à S5) et le coccyx qui comprend 4 à 5 vertèbres soudées entre elles.
Figure 1-1 : Le rachis sain – vue latérale (gauche) et antéro-postérieure (droite). Adaptée de Gray, H. (1918). Anatomy of the human body. Philadelphia : Lea & Febiger. Consulté le 24 mars 2015, tiré de http://www.bartleby.com/107/ (Gray et al., 1918).
1.1.2 Vertèbres
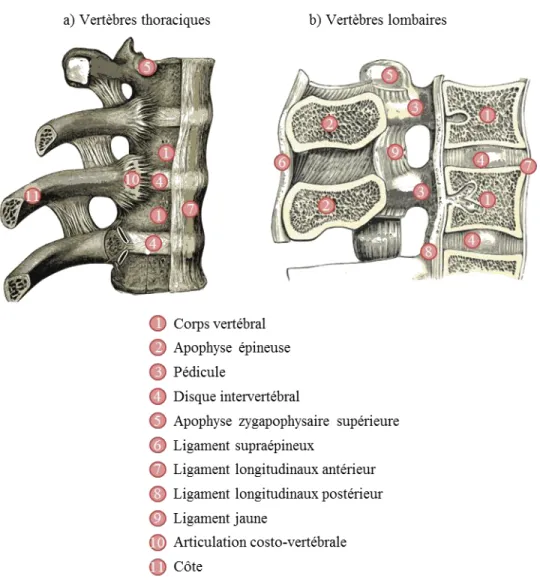
Les vertèbres sont dites des os rayonnés car elles possèdent un corps duquel partent des expansions. Les vertèbres de chaque segment principal (cervical, thoracique, lombaire ou sacré) ont des morphologies et des fonctions différentes, mais elles sont dans l’ensemble composées de deux parties distinctes (Figure 1-2). Le corps vertébral (partie antérieure) est un bloc osseux et massif grossièrement cylindrique ayant pour fonction de supporter et transmettre le poids de la partie supérieure du corps humain. Les apophyses postérieures (parties postérieures) sont reliées au corps vertébral par deux pédicules qui se rejoignent par deux lames, ceci formant le foramen vertébral (ou canal médullaire) ayant pour vocation de protéger la moelle épinière. Au niveau postérieur des lames se détache l’apophyse épineuse. Les vertèbres thoraciques possèdent, au niveau antérieur des pédicules, 4 facettes dites facettes costo-vertébrales et, au niveau des
apophyses transverses, 2 facettes articulaires dites costo-transverses. Ces facettes servent à établir la liaison avec les côtes. À tous les niveaux, l’articulation entre les corps vertébraux se réalise par l’intermédiaire des disques intervertébraux et de ligaments. La description du système articulaire (disques intervertébraux et ligaments) ne sera pas décrite en détails car non pertinente pour la suite de la thèse.
Figure 1-2: Structure vertébrale – a) thoracique et b) lombaire. Adaptée de Gray, H. (1918). Anatomy of the human body. Philadelphia : Lea & Febiger. Consulté le 24 mars 2015, tiré de
http://www.bartleby.com/107/ (Gray et al., 1918).
Figure 1-3 : Système articulaire vertébral – a) thoracique et b) lombaire. Adaptée de Gray, H. (1918). Anatomy of the human body. Philadelphia : Lea & Febiger. Consulté le 24 mars 2015, tiré de http://www.bartleby.com/107/ (Gray et al., 1918).
1.1.3 Composition osseuse des vertèbres
La structure de la vertèbre comprend à la périphérie une composante osseuse très dense d’os cortical et une partie d’os spongieux ou trabéculaire à l’intérieur (Figure 1-4). L’os cortical a une épaisseur variable selon les régions des vertèbres et selon les niveaux vertébraux (Kothe et al., 1996, Edwards et al., 2001). L’épaisseur de l’os cortical est généralement autour de 0,5 mm dans le corps vertébral (Silva et al., 1994), autour de 1 mm dans les apophyses postérieures (Wagnac, 2011) et peut atteindre une épaisseur autour de 2 mm dans les régions pédiculaires (Hirano et al.,
1997). La partie centrale (os spongieux ou trabéculaire) est un réseau composé de trabécules et ayant une forte porosité (75 à 95%). Les trabécules sont assimilables à des plaques et poutres osseuses dont l’épaisseur varie de 100 à 300 µm environ. Ainsi, les trabécules ont une organisation décrite comme matricielle et forment un « échafaudage » offrant un compromis entre résistance et légèreté. Dans les interstices des trabécules se trouve un réseau de fluide sanguin et de moelle osseuse. Les propriétés mécaniques de l’os trabéculaire (résistance, module d’Young, nature du comportement en compression) sont plus faibles et différentes de celles de l’os cortical.
Figure 1-4: Composition osseuse vertébrale. Coupe dans le plan sagittal d’une vertèbre lombaire. Adaptée de Gray, H. (1918). Anatomy of the human body. Philadelphia : Lea & Febiger.
Consulté le 24 mars 2015, tiré de http://www.bartleby.com/107/ (Gray et al., 1918) et de Wikipédia, l'encyclopédie libre, page consultée le 10 avril 2015 (http://goo.gl/4enYtG).
L’architecture osseuse qui compose les vertèbres est une structure complexe qui combine des structures corticales et des volumes d’os spongieux importants dont les contributions mécaniques sont particulièrement significatives. La distribution de l’os trabéculaire dans les vertèbres n’est pas uniforme et certaines zones ont une densité en trabécules plus faible, créant ainsi des zones de rigidité plus faible. Plusieurs études ostéologiques ont permis de déterminer des zones de densité osseuse plus faible dans les corps vertébraux (Figure 1-5). Les régions de plus basse densité semblent généralement être la partie centrale et antérieure du corps vertébral mais les résultats montrent une forte variation selon les études. Hirano et al. (1997) a également montré une composition osseuse différente dans les pédicules, avec une plus grosse épaisseur de l’os cortical,
une couche intermédiaire sub-corticale et un centre trabéculaire. Cette couche sub-corticale est une zone trabéculaire plus dense, offrant ainsi une meilleure résistance mécanique.
Figure 1-5 : Différentes cartographies des zones de plus faible densité osseuse et régions osseuses les plus faibles. Vues sagittale et transverse de A : Keller et al. (1992), B : Keller et al. (1989), C : Banse et al. (2001), D : Antonacci et al. (1997), et E : Chen et al. (2008).
L’architecture de l’os spongieux dépend de son emplacement anatomique, conditionné de ce fait par le type de sollicitation auquel l’os est soumis (Heggeness et al., 1997) (Figure 1-6). Les trabécules s’organisent naturellement pour générer des « lignes de force », générant ainsi une forte anisotropie dans son comportement mécanique.
De par leur composition bi-phasique (solide et fluide), les structures osseuses ont des propriétés mécaniques pouvant inclure des comportements poreux ou visqueux (dépendant du temps) dû à la phase liquide. Pour une modélisation statique ou quasi-statique, le comportement du fluide peut être négligé (Keaveny et al., 1994). La distribution de la densité osseuse et l’organisation des trabécules causent une forte anisotropie des propriétés mécaniques. Les propriétés peuvent varier selon l’âge, le sexe et l’origine géographique (Ritzel et al., 1997, Chen et al., 2008, Garo, 2010 ). L'os spongieux est anisotrope, mais on le considère souvent comme orthotrope. Son comportement est très différent en compression et en traction (Ashman et al., 1988, Kopperdahl
et al., 1998, Garo et al., 2011). Bien que l'os cortical soit anisotrope, l’hypothèse souvent retenue
est celle d’un comportement isotrope (An et al., 1999, Garo et al., 2011).
Figure 1-6 : Trabécules et lignes de force sur une coupe coronale (A) et sur une coupe sagittale (B) du corps vertébral. Adaptée avec permission de Heggeness et al. (1997).
1.2 Scoliose
La scoliose est une pathologie qui cause une déformation tridimensionnelle de la colonne vertébrale, de la cage thoracique et du bassin (Kouwenhoven et al., 2008). Elle peut être d’origine congénitale, neuromusculaire ou dite idiopathique (de cause inconnue). Cette maladie apparait généralement durant l’adolescence (lors de la période de croissance) et touche principalement les filles (dans 90% des cas (Rogala et al., 1978, Roach, 1999)). La scoliose idiopathique adolescente a une prévalence de 3% à 5% et environ 10% des patients nécessiteront un traitement (Roach, 1999, Asher et al., 2006). Cette pathologie peut conduire à des douleurs chroniques ainsi que des troubles neurologiques, cardiaques et respiratoires.
La sévérité de la déformation est généralement mesurée par l'angle de Cobb. Ce critère se mesure cliniquement sur une radiographie du rachis de face. C'est l'angle formé à partir de l'intersection de deux droites tangentielles, l'une au plateau supérieur de la vertèbre limite (la plus « penchée ») supérieure, l'autre au plateau inférieur de la vertèbre limite inférieure. L’apex (vertèbre apicale) est la vertèbre la plus excentrée ou horizontale dans la courbure (Figure 1-7).
Figure 1-7 : Mesure de l’angle de Cobb d’une double scoliose (lombaire et thoracique). Adaptée de Wikipédia, l'encyclopédie libre, page consultée le 10 avril 2015 (http://goo.gl/lCEQqY).
Lorsque la scoliose est peu prononcée, pour un angle de Cobb inférieur à 20°, il n’y a pas de traitement préconisé mais un suivi régulier est conseillé pour surveiller la progression. Lorsque l’angle de Cobb est entre 20° et 40°, le traitement par corset est indiqué (Clin, 2010). Lorsque la scoliose est trop sévère (angle de Cobb supérieur à 40°), il est nécessaire de corriger la courbure du rachis à l'aide d'une correction chirurgicale par instrumentation. La SRS (Scoliosis-Research-Society, 2005) rapporte qu'il y a entre 15 000 et 20 000 chirurgies de correction de la scoliose en Amérique du Nord par an.
1.3 Correction chirurgicale de la scoliose par instrumentation
L'objectif de la correction par instrumentation est de réaligner, rigidifier et stabiliser le rachis par une fusion osseuse (arthrodèse). Historiquement, les premières arthrodèses de vertèbres ont été effectuées en 1881 et présentées par Hadra (1975) avec l’utilisation de fils d’argent. Les premières utilisations de vis pédiculaires ont été décrites par Boucher (1959). C'est à partir des années 1970 que certains pionniers commencent à populariser cette technique avec des systèmes combinant des vis, crochets et tiges ou plaques (Harrington et al., 1969, Roy-Camille et al., 1986, Kabins et al., 1991). Actuellement, il existe essentiellement deux types d'implants (vis, crochets) combinés à des tiges et plusieurs techniques d'instrumentation. Daffner et al. (2010) ont relevé que 80% des corrections de scolioses idiopathiques adolescentes sont réalisées par approche postérieure. De plus, Liljenqvist et al. (2002) et Kim et al. (2004) ont montré que les montages par vis pédiculaires ont un plus grand pouvoir de correction que les montages avec crochets.
Les méthodes d’augmentation par ajout d’un « ciment » (à base de PMMA, calcium ou hydroxyapatite et cyanoacrylate) (Becker et al., 2008, Elder et al., 2015), injecté à travers des vis canulés ou par l’utilisation de vis expansives (Cook et al., 2001, Lin et al., 2003, Cook et al., 2004, Esenkaya et al., 2006, Vishnubhotla et al., 2011, Benson et al., 2014) ont montré de meilleures performances biomécaniques. Néanmoins, leur utilisation n'est pas toujours recommandée puisqu'elles peuvent conduire à plus de complications lors d'opérations de révisions (Mehta et al., 2012). Ce projet se dirige vers l'étude des systèmes utilisant des vis pédiculaires « conventionnelles ».
1.3.1 Les vis pédiculaires
Les vis pédiculaires ont pour but de créer un lien entre les vertèbres et les tiges d’instrumentation. Les vis sont composées d’un axe fileté et d’une tête de vis adaptée pour pouvoir les fixer aux tiges d’instrumentations. Les têtes de vis peuvent être solidaires du corps de la vis (vis uni-axiale) ou être articulées et offrant un ou plusieurs degré de liberté en rotation (planaire ou multi-axiale). Les vis uni-axiales offrent un meilleur pouvoir de correction (Kuklo et al., 2005) mais les vis multiaxiales permettent un positionnement plus facile et moins d’ajustement pour le placement et la fixation des tiges d’instrumentation (Kuklo et al., 2005) ainsi qu’une réduction
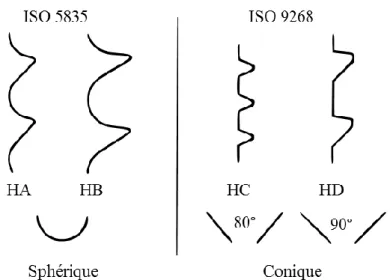
des forces générées à l’interface vertèbre-vis lors des manœuvres (Wang et al., 2012). Le profil des corps de vis (profil du diamètre intérieur) peut être conique ou cylindrique (Kwok et al., 1996) (Figure 1-10). Les filets peuvent être simples ou doubles et leur profil peut être conique ou sphérique (Figure 1-11). Finalement, la taille générale des vis (longueur et diamètre extérieur) est très variable pour pouvoir s’adapter aux différentes tailles et morphologies de vertèbres. Les vis peuvent être en acier inoxydable, en alliage de cobalt-chrome ou en alliage de titane (Navarro et
al., 2008).
Les vis sont insérées par approche postérieure, à travers les pédicules. Le point d’insertion se trouve sur la face postérieure des lames vertébrales (Figure 1-9); le point idéal varie selon le niveau vertébral (Modi et al., 2009), la trajectoire d’insertion visée (Chung et al., 2008, Dhawan
et al., 2008, Brown et al., 2010) et la sévérité de la scoliose (Modi et al., 2010). Les vis sont
généralement insérées à 90% de la profondeur maximale pour éviter une perforation de la paroi corticale antérieure des corps vertébraux (Liljenqvist et al., 2000).
Figure 1-8 : Différences géométriques entre vis à profil conique et à filet double dans la zone distale (a) et vis à profil cylindrique à filet simple (b).
Le montage d’instrumentation (vis et tiges) a pour vocation de soutenir la colonne et transmettre le poids du tronc vers les niveaux inférieurs du rachis jusqu’à la fusion totale des segments de colonne vertébrale instrumentée. Le montage restera ainsi installé à vie si aucune opération de révision n’est effectuée. Le temps de fusion osseuse peut varier entre 3 à 6 mois (White et al., 1990), durée pour laquelle les vis et tiges d’instrumentation sont dimensionnées. Le rôle de
transmission des charges du montage s’atténue avec le temps grâce à la fusion osseuse qui prend ensuite le relais (Figure 1-12).
Figure 1-9 : Visualisation simplifiée de l’emplacement d’une vis pédiculaire dans une vertèbre thoracique. Adaptée de Gray, H. (1918). Anatomy of the human body. Philadelphia : Lea & Febiger. Consulté le 24 mars 2015, tiré de http://www.bartleby.com/107/ (Gray et al., 1918).
Figure 1-10 : Description et nomenclature des vis pédiculaires. Cet exemple est une vis à tête multiaxiale à filet double « conique » dans la partie distale de la vis.