Hybrid Force/Position control applied to automated guiding tasks at the Microscale.
Texte intégral
Figure



Documents relatifs
- le domaine réactionnel s’organise en zones séparées par des limites (relativement) nettes, ce qui traduit le fait que la composition du fluide évolue près de
This is in agreement with the real time response recorded with Love wave platform where the frequency decreases at the first injection of cadmium (10 12 M) followed by a
This architecture attempts to mediate the conflicts between the goal of autonomy and the goals of integration and evolution. All of the layers, except for message control and
The long collection time and the bipolar current pulse are due to the resistive sheets at both sides in the duo-lateral PSD.. Therefore the pulse shapes at
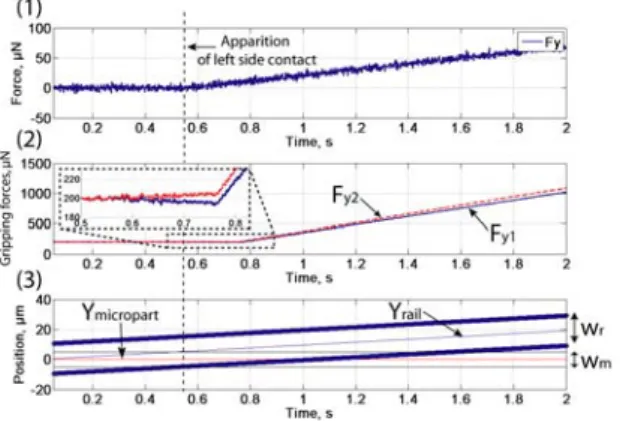
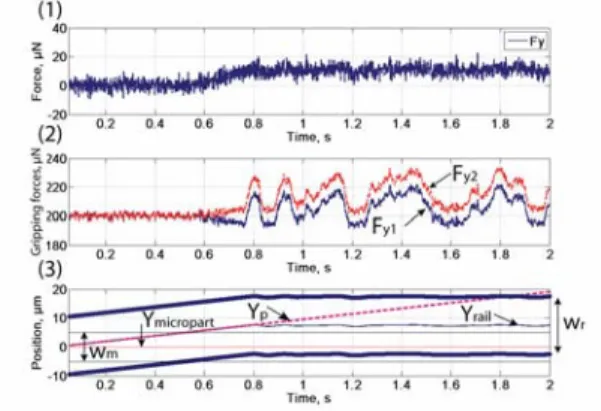
1, one can see that the considered peg-in-hole assembly process is composed of three phases; phase 1 in which the robot is in free space, phase 2 that is resulted when the
Volume 17 No 1 Swissnoso Page 1 Recommandations pour le personnel de santé infecté par les virus de l’hépatite B, de l’hépatite C ou de l’immunodéficience
Despite a human-like behaviour of the automated system, robustness and usability are limited (Barto, 2019). A control algorithm for combined position and force control for
Si le point (-5, 12) se trouve sur le côté terminal d’un angle en position standard, détermine les valeurs exactes des six rapports
