Modèles Autorégressifs Exponentiels
Périodiques
ةرازو
ﻢﻴﻠﻌﺘﻟا
ﱄﺎﻌﻟا
ﺚﺤﺒﻟاو
ﻲﻤﻠﻌﻟا
BADJI MOKHTAR -ANNABA
UNIVERSITY
UNIVERSITE BADJI MOKHTAR
ANNABA
ةعماج
يجاب
راتخم
-ةبانع
-Faculté des Sciences
Département de Mathématiques
Laboratoire LaPS
THÈSE
Présenté en vue de l’obtention du diplôme de Doctorat en
Mathématiques
Option
Probabilités-Statistiques
Par
Mme Dridi Hadjer
DIRECTEUR DE THÈSE : Chadli Assia Prof. U.B.M. ANNABA
CO-DIRECTEUR DE THÈSE : Merzougui Mouna MCA U.B.M. ANNABA
Devant le jury
PRESIDENTE : Seddik-Ameur Nacera Prof
U.B.M. ANNABAEXAMINATEUR : Laskri Yamina Prof E.P.S.T.Annaba
TABLE DES MATIÈRES
Résumé iii
Abstract iv
Introduction v
1 Théorie asymptotique de LeCam 1
1.1 Normalité asymptotique locale (LAN) . . . 1
1.1.1 Convergence faible des expériences statistiques . . . 3
1.1.2 Contiguïté . . . 4
1.2 Concepts d’optimalité asymptotique locale . . . 5
1.2.1 Test le plus stringent . . . 5
1.2.2 Critère Minimax Asymptotique Local (LAM ) . . . 6
2 Modèle AutoRégressif EXPonentiel EXP AR(p) 9 2.1 Introduction . . . 9
2.2 Modèles et dé…nitions de bases . . . 10
2.2.1 Dé…nitions . . . 10
2.2.2 Modèles Autorégressifs Exponentiels . . . 10
2.2.3 Conditions de stationnarité . . . 13
2.3 Estimation des modèles EXP AR . . . 14
2.3.1 Procédure d’estimation donnée par Haggan et Ozaki 1981 . . . 14
2.3.3 Autres méthodes d’estimation . . . 17
2.4 Modèle EXP AR(1) restreint . . . 19
3 Test de la périodicité dans un modèle EXP AR 21 3.1 Notations, Dé…nitions et conditions de régularités . . . 21
3.1.1 Dé…nitions et notations principales . . . 21
3.1.2 Hypothèses de régularités techniques . . . 24
3.2 Normalité Asymptotique Locale du modèle P EXP AR(1) restreint . . . 24
3.2.1 Suite de Rapports de Vraisemblance . . . 25
3.2.2 Normalité Asymptotique Locale . . . 26
3.3 Test Asymptotique Locale (le plus Stringent) . . . 32
4 Estimation du modèle P EXP AR(1) restreint 38 4.1 Introduction . . . 38
4.2 Estimation du modèle P EXP AR(1) par la méthode de M CO : . . . 39
4.2.1 Notation et hypothèses . . . 39
4.2.2 Estimation . . . 40
4.2.3 Résultats de simulations : . . . 43
4.3 Estimateur Localement et Asymptotiquement Minimax LAM . . . 45
4.3.1 Normalité Asymptotique Locale . . . 46
4.3.2 Existence et construction d’estimateurs LAM . . . 53
Résumé
Cette thèse est consacrée, essentiellement, à l’étude de quelques problèmes de l’inférence statistique liée au paramètre du modèle EXP AR(1) périodique restreint. Nous nous sommes intéressé, dans un premier temps, à la construction d’un test paramétrique de périodicité asymptotiquement optimal au sens le plus stringent. Pour cela, nous proposons une statis-tique de test motivée par la théorie de Le Cam sur la normalité asymptostatis-tique local (LAN ). Ce travail dégage un résultat important c’est l’introduction, dans la littérature des séries chronologiques, d’un nouveau modèle qui exhibe une dynamique non linéaire périodique : le modèle EXP AR restreint périodique. Le second objectif de ce travail est de construire un estimateur localement et asymptotiquement minimax du modèle EXP AR(1) restreint périodique, dans un cadre paramétrique et suivant l’approche de Le Cam (1986).
Mots clés : séries temporelles non linéaires, modèle EXP AR, séries temporelle pério-diques, normalité asymptotique locale, test « most stringent » , estimateur minimax asymp-totique local.
Abstract
This thesis is devoted, essentially, to the study of some statistical inference problems related to the periodic restricted EXP AR(1) model parameters. First, we are interested with the construction of locally asymptotically optimal test in most stringent sense. To achieve this result, we propose a statistic test motived by the theory of Le Cam on the local asymptotic normality (LAN ). This work yields to an important result is the introduce, in the literature of time series, of a new model which exhibits a nonlinear periodic dynamics : the periodic restricted EXP AR(1) model. The second objective of this work is to construct a local asymptotic minimax estimator, in parametric framework and following LeCam approach.
Key words : nonlinear time series, EXP AR model, periodic time series, local asymptotic normality, « most stringent » test, locally asyptotic minimax estimators.
ﺺﺨﻠﻣ
ﺎﺳﺎﺳﺃ ﺚﺤﺒﻟﺍ ﺍﺬﻫ ﺺﺘﺨﻳ
ﺑ
ﺝﺫﻮﻤﻧ ﺕﻼﻣﺎﻌﻤﺑ ﺔﻘﻠﻌﺘﻤﻟﺍ ﻲﺋﺎﺼﺣﻹﺍ ﻝﻻﺪﺘﺳﻻﺍ ﻞﻛﺎﺸﻣ ﺾﻌﺑ ﺔﺳﺍﺭﺪ
ﺪﻴﻘﻤﻟﺍ ﻲﺳﻷﺍ ﻲﺗﺍﺬﻟﺍ ﺭﺍﺪﺤﻧﻻﺍ
EXPAR(1).
ﺚﻴﺣ
ﺔﻳﺍﺪﺒﻟﺍ ﻲﻓ ﺎﻨﻤﻤﺘﻫﺍ
ﺭﺎﺒﺘﺧﺍ ءﺎﺸﻧﺈﺑ
"
MOST STRINGENT"
ﻟﺍ
ﻱﺩﻭﺪﺤ
ﻟﺍ
ﺎﻴﻠﺤﻣ ﺏﺭﺎﻘﻤ
ﻭ
ﻟﺍ
ﻖﻠﻌﺘﻤ
ﺕﺎﺒﺛﺈﺑ
ﻳﺭﻭﺩ
ﺝﺫﻮﻤﻧ ﺔ
ﺭﺍﺪﺤﻧﻻﺍ
ﺔﻴﺋﺎﺼﺣﺇ ﺡﺍﺮﺘﻗﺎﺑ ﺎﻨﻤﻗ ﻚﻟﺬﻟ .ﻲﺳﻷﺍ ﻲﺗﺍﺬﻟﺍ
ﺔﻳﺮﻈﻨﺑ ﺔﻤﻋﺪﻣ ﺭﺎﺒﺘﺧﺍ
Le Camﻭ
ﻰﻠﻋ ﺔﻤﺋﺎﻗ
ﻲﻌﻴﺒﻄﻟﺍ ﻥﻮﻧﺎﻘﻟﺍ ﻮﺤﻧ ﻲﻠﺤﻤﻟﺍ ﺏﺭﺎﻘﺘﻟﺍ ﺔﻴﺻﺎﺧ
) (LANﻡﺪﻗ .
ﺔﻴﻨﻣﺰﻟﺍ ﻞﺳﻼﺴﻟﺍ ﻲﻓ ﺚﺤﺒﻟﺍ ﻝﺎﺠﻣ ﻲﻓ ﺔﻤﻬﻣ ﺔﺠﻴﺘﻧ ﻞﻤﻌﻟﺍ ﺍﺬﻫ
ﺔﻴﻜﻴﻣﺎﻨﻳﺩ ﻚﻠﺘﻤﻳ ﺪﻳﺪﺟ ﺝﺫﻮﻤﻨﺑ ﻒﻳﺮﻌﺘﻟﺍ ﻮﻫﻭ
ﺝﺫﻮﻤﻧ ﻮﻫﻭ ﺔﻴﻄﺧ ﺮﻴﻏ ﺔﻳﺭﻭﺩ
ﺭﺍﺪﺤﻧﻻﺍ
ﻝﻮﺼﺤﻟﺍ ﻮﻫ ﻞﻤﻌﻟﺍ ﺍﺬﻫ ﻦﻣ ﻲﻧﺎﺜﻟﺍ ﻑﺪﻬﻟﺍ .ﻱﺭﻭﺪﻟﺍ ﻲﺳﻷﺍ ﻲﺗﺍﺬﻟﺍ
ﺭﺪﻘﻤﻟﺍ ﻰﻠﻋ
LAMﺔﻴﺠﻬﻨﻣ ﻉﺎﺒﺗﺎﺑ ﻚﻟﺫﻭ
Le Cam ) 1986 (.
ﺔﻴﺣﺎﺘﻔﻤﻟﺍ ﺕﺎﻤﻠﻜﻟﺍ
:
ﻞﺳﻼﺴﻟﺍ
ﺔﻴﻨﻣﺰﻟﺍ
،ﺔﻴﻄﺨﻟﺍ ﺮﻴﻏ
ﺝﺫﻮﻤﻧ
EXPAR
،
ﻞﺳﻼﺴﻟﺍ
ﺔﻴﻨﻣﺰﻟﺍ
،ﺔﻳﺭﻭﺪﻟﺍ
ﺏﺭﺎﻘﺘﻟﺍ
ﻲﻠﺤﻤﻟﺍ
ﻮﺤﻧ
ﻥﻮﻧﺎﻘﻟﺍ
ﻲﻌﻴﺒﻄﻟﺍ
،
ﺭﺎﺒﺘﺧﻻﺍ
"
ﺮﺜﻛﻷﺍ
ﺔﻣﺍﺮﺻ
"
،
ﺭﺪﻘﻤﻟﺍ
LAM
.
Introduction
Les Modèles linéaires des séries chronologiques ont été longtemps considérées comme un outil puissant pour l’analyse générale des séries temporelles avec des procédures d’estimation robustes, une théorie statistique complète ainsi qu’une bonne capacité prédictive. Cepen-dant, ces modèles ne sont pas appropriés en présence des caractéristiques non linéaires et de nombreux processus physiques et naturels sont plus précisément modélisés par un mo-dèle non linéaire que par une représentation linéaire. Vers la …n des années 1970, divers modèles de séries chronologiques non linéaires, à savoir : Modèles bilinéaire (Granger et An-dersen, 1978), modèles autorégressifs à seuils (T AR) (Tong, 1978), Modèles autorégressifs exponentiels (EXP AR) (Haggan et Ozaki, 1981) et les modèles ARCH (Engle, 1982) ont été proposées et appliquées avec un grand succès dans de nombreux problèmes importants de la vie réelle. Tong (1990), Priestley (1988) et Tjøstheim (1994) ont fourni plusieurs fondations de l’analyse des séries chronologiques non linéaire paramétrique.
La classe des modèles Autorégressif Exponentiel (EXP AR), a été introduite par Ozaki (1978)et Haggan et Ozaki (1981), pour la modélisation et la prévision des données cycliques. Ces modèles ont la forme des modèles autorégressifs mais avec des coe¢ cients dépendant de l’amplitude. En plus, ces modèles ont montré leur pertinence pour capturer certains phéno-mènes qui sont bien connues dans la théorie des vibrations non linéaires comme la fréquence dépendante de l’amplitude, les phénomènes de saut et des comportements de cycle limite, elles possèdent aussi plusieurs caractéristiques encourageantes, en e¤et Ozaki en 1993 a mon-tré qu’un modèle EXP AR peut capturer les caractéristiques non gaussienne de la série, dans le même ouvrage une relation étroite entre les modèles EXP AR et la famille exponentielle est souligné, Ozaki a montré que pour une distribution donnée de la famille exponentielle on peut introduire un modèle EXP AR dont la distribution marginale est très proche de la distribution donnée. Dans l’analyse des séries temporelle non linéaire, il est parfois soutenu que les modèles non linéaires qui ont un bruit blanc gaussien homogène, comme les modèles EXP AR, ne sont pas appropriées pour l’analyse des séries temporelle dont la distribution marginale est à queues lourdes, ces séries se trouvent dans les données …nancières. Pour l’ana-lyse de ces séries, les chercheurs utilisent souvent le modèle ARCH; Ozaki (1993) a montré que le modèle EXP AR combinée à une transformation de variable instantanée est utile pour la modélisation d’une telle série chronologiques hétéroscédastique. Récemment, Katsiampa
CHAPITRE 0. INTRODUCTION (2014) a combiné les modèles EXP AR aux modèles ARCH en introduisant une nouvelle classe de séries temporelles non linéaires : EXP AR ARCH et EXP AR GARCH, et qui sont des combinaisons d’un modèle non linéaire en moyenne conditionnelle et un modèle non linéaire en variance conditionnelle et qui a le potentiel d’expliquer des données observées en …-nance. Une application sur l’indice de prix du Dow Jones a montrée que les nouveaux modèles peuvent expliqués ces données réels mieux que les modèles AR ARCH et AR GARCH. Cette classe des séries temporelles non linéaire a trouvé des applications réussies dans de nombreux domaines, y compris l’écologie ( Haggan et Ozaki ; 1981, Priestley ; 1988), l’hydrologie (Ozaki ; 1985), signale de la parole ( K. Ishizuka et all., 2005), macroéconomie ( N. Terui et HK Van Dijk ; 1999, E. Amiri ; 2012) et météorologie (Bishal Gurung ; 2013).
Divers propriétés théoriques tel que la stationnarité, l’ergodicité géométrique, l’estimation, la prévision et les tests ont été l’objet d’étude par plusieurs auteurs. Chan et Tong (1985) ont montré l’existence d’une solution stationnaire et géométriquement ergodique pour le modèle EXP AR(1), Al- Kassam et Lane (1989) ont proposé une méthode de prévision pour ce modèle, Koul et Schick (1997) ont donné la propriété LAN et ont étudié le problème de l’estimation e¢ cace et Allal et El Melhaoui (2006) ont construit un test paramétrique et non paramétrique pour la détection d’une composante exponentielle dans un modèle AR(1), cela revient à tester une hypothèse d’autorégression linéaire d’ordre un contre une hypothèse d’autorégression exponentielle d’ordre un, Shi et Aoyama (1997), Baragona et al. (2002) ont utilisé l’algorithme génétique (AG) pour estimer les paramètres des modèles EXP AR(p).
Il est bien connue que de nombreuses séries temporelles rencontrées, en pratique, dans plusieurs domaines révèlent un comportement saisonnier, un fait qui ne peut pas être ex-pliquer par les modèles de séries temporelles à paramètres invariant dans le temps, pour résoudre ce problème, Box et Jenkins (1970) ont proposé un type particulier de modèles linéaire saisonniers qui sont les modèles SARIM A, et qui malgré leur e¢ cacité, sou¤rent d’une lacune majeure : ils sont incapable de représenter adéquatement de nombreuses sé-ries chronologiques saisonnières exhibant une structure d’autocovariance périodique, parce qu’en fait les modèles SARIM A sont des cas particulier des processus ARIM A dont les autocorrélations ne dépendent pas de la saison. Ce fait a motivé les recherches dans les pro-cessus périodiquement corrélés, cette notion a été exploitée dans une variété de nouvelles classes de modèles de séries chronologiques qui sont les modèles périodiques. C’est ainsi que nous avons l’extension des modèles classiques aux cas périodiques : Modèles GARCH Pério-diques (Bollerslev et Ghysels (1996)), Modèles Treshold PérioPério-diques (Lewis et Ray (2002)), Modèles Bilinéaires Périodiques (Bibi et Gautier (2005)), Modèles de Mélange Périodiques (Shao (2006))...etc. La source d’inspiration originale des modèles des séries temporelles à coe¢ cients dépendants du temps était le travail de Gladysev (1961) sur les autocorrélations périodiques qui a été a¢ né ensuite par Tiao et Grupe (1980). Plusieurs auteurs ont exploré les conditions de stationnarité, l’estimation et les tests des modèles linéaires et non linéaires périodiques, y compris Jones et Brelsford (1967), Pagano (1978), Troutman (1979), Ander-son et Vecchia (1993), Bentarzi et Hallin (1996), Aknouche et Bentarzi (2008), Aknouche et Guerbyenne (2009), Bibi et Aknouche (2009), Bentarzi et al (2009) et plusieurs autres. En
outre, ces modèles ont été largement utilisés dans les dernières décennies pour décrire des séries possédant une structure périodiques rencontrés dans plusieurs domaines en particulier en économie (e.g., Ghysels et al (1996), Osborn et Smith (1989), et autres) de même que dans les études hydrologiques et environnementales (Bloom…eld et al (1994), Vecchia et al (1983), Ula et Smadi (1997), Salas et al (1982) et autres).
Le modèle EXP AR périodique est l’extension périodique de l’EXP AR non saisonnier, il consiste à avoir un EXP AR distinct pour chaque saison de l’année. La motivation der-rière la proposition de ce modèle est justi…ée, d’une part, pour saisir les caractéristiques de non-linéarité tel que les cycles limites du modèle EXP AR, et d’autre part, par le fait qu’ils permettent aux coe¢ cients sous-jacents d’être périodiques pour capturer le phénomène de périodicité. Puisque un modèle autorégressif exponentiel périodique compte plus de para-mètres que son analogue traditionnel et il est plus compliqué, alors il est très important de véri…er la nécessité de la périodicité avant de l’envisager.
Le premier objectif de ce travail est de construire un test, paramétrique, localement et asymptotiquement optimal pour tester la périodicité du modèle autorégressif exponentielle d’ordre un (EXP AR (1)) restreint, le concept d’optimalité en théorie des tests d’hypothèses que nous allons utilisés est le test "le plus stringent", introduit par Wald (1943). Dans le cadre des modèles semi paramétriques périodiques, Bentarzi et Hallin (1996) sont les premiers à avoir traité le problème d’inférence optimale en e¤ectuant un test localement paramétrique et non paramétrique pour les modèles AR contre modèles AR périodiques. Dans ce travail, ils ont introduit la notion de perturbation périodique qui ajoutée à la perturbation non périodique et associée au paramètre d’intérêt formera la suite locale de valeur du paramètre. Ce point permettra aux chercheurs de résoudre le problème de tests paramétriques et semi paramétriques pour les modèles périodiques, ce test a été généralisé dans le cas multivarié par Hallin et Lot… (2004). Récemment, un test adaptatif pour la périodicité dans les processus SET AR et ARCH a été fait par Bentarzi et Merzougui (2009; 2010).
Le résultat clé qui nous permet d’établir le test localement et asymptotiquement opti-male est la propriété de Normalité Asymptotique Locale (LAN ). L’idée d’approcher une suite d’expériences statistiques par une famille gaussienne remonte aux années quarante ; plus précisément, sa première formulation a été établie par Wald (1943). Le développement considérable qu’a connu ce concept est dû à Le Cam (1986), qui a introduit le terme de nor-malité asymptotique locale (LAN ) - Local Asymptotique Normality -. Plusieurs chercheurs se sont intéressés à la dérivation de cette propriété pour divers modèles : Roussas (1979) pour les modèles Autorégressifs d’ordre un, Akritas et Johnson (1982) pour le modèle au-torégressif général, Swensen (1985), qui en démontrant la propriété LAN pour les modèles AR avec tendance linéaire, a donné un résultat fort et très utilisé, il s’agit du lemme qui permet d’avoir cette propriété en véri…ant des conditions su¢ santes, Kreiss (1987) pour le modèle ARM A, Linton (1993) pour les modèles ARCH, Bengabrit et Hallin (1998) pour les modèles bilinéaires, Bentarzi et Hallin (1996) pour les modèles AR périodiques, Garel et Hallin (1995) pour les modèles ARM A multivariés, Koul et schick (1996; 1997) pour le modèle AR d’ordre un à coe¢ cient aléatoire et pour le modèle SET AR(2; 1; 1), Bentarzi et
CHAPITRE 0. INTRODUCTION Merzougui (2009; 2010) pour les modèles P SET AR(2; 1; 1)S et P ARCH(q)S...etc.
Toujours et dans le cadre d’étude des modèles P EXP AR (1) restreint, nous avons abordé le sujet d’estimation des paramètres de ces modèles, comme second objectif de ce travail. Il est bien connu que l’estimation du paramètre du modèle EXP AR nécessite essentiellement des procédures d’optimisation non linéaire, alors que dans le cas du modèle EXP AR restreint ce problème se réduit à un problème de régression linéaire simple. Premièrement nous présentons les estimateurs de moindre carrée pour les paramètres du modèle P EXP AR (1) restreint. La deuxième méthode d’estimation considérée est la méthode minimax asymptotique locale (LAM ).
L’intitulé de cette thèse est " Modèles Autorégressifs Exponentiels Périodiques ". Notre objectif est d’utiliser l’approche de LeCam, connectée au modèle exponentiel Autorégres-sif d’ordre un, EXP AR (1), restreint pour construire un test paramétrique de périodicité asymptotiquement optimal au sens le plus stringent et, du coup, introduire un modèle de série chronologique exhibant une dynamique non linéaire périodique, nomémment, le modèle EXP AR restreint périodique et de construire un estimateur asymptotiquement optimal au sens LAM . Pour accomplir cet objectif nous avons suivi la méthodologie suivante :
Apport et présentation de la thèse
Chapitre 1 : Théorie asymptotique de LeCam
Dans ce chapitre, on présente les notions de bases qui ont permis de faire ce travail c’est à dire l’approche asymptotique de LeCam (1960; 1986) : propriété LAN , contiguïté, propriété de linéarité, convergence faible des expériences statistiques, le test le plus stringent qui est le concept d’optimalité asymptotique valable sous la structure LAN et la borne minimax asymptotique locale LAM:
Chapitre 2 : Modèle autorégressif exponentiel
EXP AR(p)Le deuxième chapitre est réservé aux dé…nitions de base de cycle limite, du point …xe et du modèle EXP AR (p), introduit par Ozaki (1978) et Haggan et Ozaki (1981), ainsi que les conditions de stationnarité stricte et d’ergodicité géométrique pour l’EXP AR (1) : On traite aussi l’estimation des paramètres avec plusieurs méthodes et en …n, on présente le modèle EXP AR(1) restreint avec son estimation par les moindres carrés établi par Koul et Schik (1997).
Chapitre 3 : Test de la périodicité dans un modèle EXPAR
On introduit, dans ce chapitre, le modèle EXP AR(1) restreint périodique, et après avoir décrit la suite de logarithmes des rapports de vraisemblance, nous véri…ons, en utilisant le lemme de Swensen (1985), que le modèle EXP AR(1) restreint périodique jouit de la propriété LAN. Puis en établissant la linéarité asymptotique locale de la suite centrale, on donne le résultat le plus important de cette thèse, présenté dans la proposition 3:3:1 et qui donne
le test paramétrique localement asymptotiquement optimal au sens le plus stringent d’un modèle EXP AR (1) restreint contre un modèle EXP AR (1) restreint périodique.
Chapitre 4 : Estimation du modèle
P EXP AR(1)restreint
Ce chapitre est consacré à l’étude du problème de l’estimation dans un modèle EXP AR(1) restreint périodique. On commence par donner les estimateurs de moindre carré ordinaire. Ensuite, les conditions su¢ santes de Swensen (1985) adaptées au modèle P EXP AR(1) restreint, sont véri…ées et permettent d’établir la propriété LAN du logarithme rapport de vraisemblance. En utilisant ces résultats, on construit des estimateurs LAM dans un cadre paramétrique.
CHAPITRE
1
Théorie asymptotique de LeCam
1.1
Normalité asymptotique locale (LAN)
Historique
L’idée d’approcher une suite d’expériences statistiques par une famille gaussienne remonte à Wald (1943), mais doit son développement à Lucien Lecam (1960; 1986), qui a introduit le terme de Normalité Asymptotique Locale. Ce cadre théorique est devenu un standard pour la résolution du problème d’e¢ cacité des tests et des estimateurs au sens asymptotique, car quand le modèle de départ est approximativement normal, il hérite de la structure simple des modèles normaux. L’essence de la propriété LAN est que le logarithme du rapport de vraisemblance est asymptotiquement normalement distribué de variance localement constante et de moyenne localement linéaire du paramètre du modèle statistique en question.
Plusieurs chercheurs se sont intéressés à la dérivation de cette propriété pour divers mo-dèles : Roussas (1979) pour les momo-dèles Autorégressifs d’ordre un, Swensen (1985), qui en démontrant la propriété LAN pour les modèles AR avec tendance linéaire, a donné un lemme qui permet d’avoir cette propriété en véri…ant 6 conditions su¢ santes et qui sera par la suite très utilisé, Kreiss (1987) pour le modèle ARM A, Linton (1993) pour les modèles ARCH, Bengabrit et Hallin (1998) pour les modèles bilinéaires, Bentarzi et Hallin (1996) pour les modèles AR périodiques (P AR), Garel et Hallin (1995) pour les modèles ARM A multivariés, Koul et schick (1996; 1997) pour le modèle AR d’ordre un à coe¢ cient aléatoire et pour le mo-dèle SET AR(2; 1; 1), Bentarzi et Merzougui (2009; 2010) pour les momo-dèles P SET AR(2; 1; 1)S
CHAPITRE 1. THÉORIE ASYMPTOTIQUE DE LECAM et P ARCH(q)S...etc. Propriété LAN Soit X(n)= (X(n) 1 ; :::; X (n)
n )0, n 2 N une suite d’observations décrites par la suite de modèles statistiques E(n) = (Rn; Bn; P(n)); où Bn est la tribu de Borel engendrée par les ouverts de Rn et P(n) =
fP(n); 2 g est une famille paramétrique de lois de probabilités dé…nies sur (Rn; Bn) et indexées de façon injective par le paramètre 2 , où est un sous ensemble ouvert de Rk: Pour chaque
2 ; on dé…nit la suite locale (localisée en ) : (n)= + (n) (n); (n)
2 Rk , (1.1.1)
où (n) est une suite de matrices k k non singulières, telles que k (n)k ! 0, et (n) est une suite de vecteurs tels que sup
n
(n)0 (n)<1: Considérons les suites de mesures de probabilités P(n) et P(n)+ (n) (n), et le rapport de la log-vraisemblance de P (n) + (n) (n) par rapport à P (n) (n) + (n) (n) = log 2 4dP (n) + (n) (n) dP(n) 3 5 ; (1.1.2)
où dQdP est la dérivée de Radon Nikodym de la partie absolument continue de Q par rapport à P .
Le point de départ des développements de la théorie asymptotique moderne est la mise en évidence, par Lecam (1960), du fait remarquable qu’une structure extrêmement générale (structure LAN ), su¢ sante à l’étude des performances asymptotiques de la quasi totalité des procédures statistiques, peut être caractérisée très simplement à partir du comportement de (n) + (n) (n) :
Dé…nition 1.1.1
Une suite d’expériences E(n)= (Rn; Bn; P(n)) est dite localement asymptotiquement normale (LAN ( ; ( ); n( ))) si pour tout 2 ; il existe une suite (n)( ) de vecteurs aléatoires Bn-mesurables, et une matrice (k k) ( ) continue en
telle que : si n ! 1, on ait, sous P(n), (i) (n) + (n) (n) = (n)0 (n)( ) 1 2 (n)0 ( ) (n)+ 0 p(1) (ii) (n)( ) = ) N(0; ( )); (1.1.3) Le vecteur (n)( ) est appelé suite centrale et ( ) est la matrice d’information.
Remarque 1.1.1 Si n ! 1 (n)0 ( ) (n) 12 (n) + (n) (n) +1 2 (n)0 ( ) (n) = ) N(0; 1):
1.1. NORMALITÉ ASYMPTOTIQUE LOCALE (LAN)
1.1.1
Convergence faible des expériences statistiques
Pour interpréter et justi…er la terminologie LAN , considérons le modèle de position gaussien N ( ( ) ; ( )) = 2 Rk ;
à une seule observation que nous notons . Il est facile de véri…er que le logarithme du rapport de vraisemblance associé à la loi gaussienne N ( ( ) ; ( )) par rapport à N (0; ( )) est donné par
0 1
2
0 ( ) ;
ce qui signi…e (voir le second membre de (1.1.3)) que le logarithme du rapport de vraisem-blance “local” en est asymptotiquement équivalent au logarithme du rapport de vraisem-blance dans un modèle de position gaussien classique. Comme nous l’expliquons ci-dessous, ceci a d’importantes implications sur la construction de procédures localement et asympto-tiquement optimales pour la suite d’expériences en question.
La normalité locale asymptotique entraine, pour tout , la convergence faible de la suite d’expériences locales (localisées en )
E(n)= Rn; Bn; P(n) =nP(n)+ (n) = 2 Rko vers le modèle de position gaussien
EN = Rk; Bk; P = N ( ( ) ; ( ))= 2 Rk
nous noterons l’unique observation associée à ce modèle limite. Ce concept de convergence est basé sur une pseudo-distance (dite distance de Le Cam ) entre les ensembles des fonctions de risque (de Rk
dans R+) réalisables sous les expériences considérées, pour les fonctions de perte bornées. Dans le contexte de test d’hypothèse, ceci signi…e en quelque sorte que, lorsque n ! 1, toutes les courbes de puissance réalisables pour l’expérience E(n) convergent, ponc-tuellement en mais uniformément en l’ensemble de toutes les procédures de test possibles, vers les courbes de puissance associées au modèle limite gaussien EN. A l’inverse, pour toute fonction de risque R réalisable dans le modèle EN, il existe une suite de fonctions de risque associées à E(n)qui converge ponctuellement vers cette fonction de risque R. Ainsi, si un test ( ) est exactement optimal au niveau dans EN, la suite de tests (n)( ) sera locale-ment en et asymptotiquement optimale dans la suite d’expériences originales ce qui veut dire que modulo la connaissance des tests optimaux dans l’expérience de shift gaussien EN la construction de tests localement asymptotiquement optimaux dans la suite d’expériences originales est directe.
Donc la convergence des expériences a des conséquences décisionnelles du moment qu’elle implique que les procédures optimales (tests et estimation) dans des expériences gaussiennes seront aussi optimales dans les expériences initialement considérées.
CHAPITRE 1. THÉORIE ASYMPTOTIQUE DE LECAM
1.1.2
Contiguïté
La notion de contiguïté, due à LeCam, joue un rôle primordial dans les méthodes asympto-tiques. Soit (X(n);
A(n)) une suite d’espaces mesurables. Soient P(n) et Q(n) deux suites de mesures de probabilités sur (X(n);
A(n)). Dé…nition 1.1.2
Si, pour toute suite A(n) 2 A(n); lim
n!1P
(n) A(n) = 0 implique lim n!1Q
(n)(A(n)) = 0;
on dit que la suite Q(n) est contiguë à P(n): Si Q(n) est contiguë à P(n)et P(n) est contiguë à Q(n), on dit que P(n)et Q(n) sont mutuellement contiguës.
Une conséquence immédiate et forte utilisée de la contiguïté est la conservation des ordres de convergences en probabilité. En e¤et, si P(n)et Q(n) sont mutuellement contiguës alors,
lim n!1P (n) Sn h(n) > " = 0 8" > 0 est équivalent à lim n!1Q (n) Sn h(n) > " = 0 8" > 0 pour toute statistique Sn A(n)-mesurable.
En pratique, il n’est pas simple d’établir la contiguïté à partir de la dé…nition, il est donc intéressant d’énoncer une démarche plus opérationnelle. Notons L(n)= dQ(n)
dP(n) la vraisemblance
de Q(n) par rapport à P(n):
Lemme 1.1.1(LeCam’s …rst lemma, Hájek et Šidák (1967)) Soit F(n) la fonction de distribution de L(n) sous P(n)dé…nie par
F(n)(x) = P(n) L(n) x ; x2 R:
Si F(n) converge faiblement (aux points de continuité) vers une fonction de distribution F satisfaisant
Z R
xdF (x) = 1, alors P(n)et Q(n) sont mutuellement contiguës.
Comme conséquence du lemme, nous énonçons le corollaire suivant qui est très utilisé en pratique : c’est la situation qu’on rencontre dans le contexte de la propriété LAN . Un résultat plus général se trouve dans Lecam (1960) :
Corollaire 1.1.1
Si logL(n) est asymptotiquement normal de moyenne 2=2 et de variance 2 sous P(n); alors P(n)et Q(n) sont mutuellement contiguës.
1.2. CONCEPTS D’OPTIMALITÉ ASYMPTOTIQUE LOCALE
Il est clair que la contiguïté conserve les convergences en probabilité. Des déductions ana-logues peuvent-elles êtres faites à propos des convergences en loi ?
La réponse à cette question est d’une grande importance notamment dans les problèmes de tests d’hypothèses. En e¤et la puissance d’un test en une suite Q(n)de contre hypothèses s’étudie à partir de la loi sous Q(n) de la statistique du test considéré ; or il est généralement plus facile d’étudier la loi asymptotique d’une statistique sous une suite d’hypothèses nulles P(n)que sous une suite de contre hypothèses Q(n): Le "3eme lemme de LeCam " fournit une réponse dans le cas particulier de la normalité asymptotique liée de la log-vraisemblance et de la statistique considérée.
Lemme 1.1.2 (LeCam’s third lemma, Hájek et Šidák (1967)) Soit S(n)
une statistique A(n)-mesurable. Soit
n une version de log dQ
(n) dP(n) : Supposons que si n ! 1, on ait, sous P(n), S(n) n L ! N 1 2 2 2 ; 2 1 12 12 22 : Alors :
(i) P(n)et Q(n) sont mutuellement contiguës; (ii)si n ! 1, S(n) L
! N( + 12; 21) sous Q(n):
1.2
Concepts d’optimalité asymptotique locale
Le Concept d’optimalité en théorie des tests d’hypothèses valable, dans ce travail, est le test "le plus stringent".
Soit H0 une hypothèse nulle, H1 sa contre hypothèse et C l’ensemble des tests véri…ant une condition de niveau ; i.e.
C = f =EP( ) ; 8P 2 H0g :
1.2.1
Test le plus stringent
La notion de test le plus stringent a été introduite par Wald (1943). Pour tout P 2 H1;soit (P ) = sup
2C
EP( ) :
(P ) est donc la meilleure puissance que puissent atteindre, en un élément P …xé de H1;les tests de la classe C: On appelle regret d’un test dans la classe C la quantité
( ) = sup P 2H1
CHAPITRE 1. THÉORIE ASYMPTOTIQUE DE LECAM Le regret de est "le pire dé…cit de puissance" auquel donne lieu ; si on le compare sur H1 aux meilleures performances possibles au sein de C: Un test est dit le plus stringent au niveau si son regret est minimum parmi les tests de niveau ; c’est à dire si
2 C
( ) ( ) ; 8 2 C:
Le test optimal dans les modèles shift gaussien se réduira à tester 2 M ( ) contre l’alternative 2 M ( ) ;=
où M ( ) est le sous espace de Rkengendré par les colonnes ( est une matrice de dimension k (k r)). On déduit alors, à partir de Lecam (1986) que pour ce type de problème le test le plus stringent au niveau est
( ) = I[ 0( 1
( 0 ) 1 0
) > 2
r;1 ]:
Donc le test localement asymptotiquement le plus stringent dans l’expérience originale est (n) = Ih (n) 0( 1 ( 0 ) 1 0 ) (n) > 2 r;1 i:
1.2.2
Critère Minimax Asymptotique Local
(LAM )
Dans les modèles classiques (paramétriques), plusieurs méthodes d’estimation ont été étudiées par exemple : maximum de vraisemblance, moindres carrés, estimateurs des moments,. . . Au contraire, dans les modèles semi paramétriques il n’y a pas encore une méthode générale pour la construction des estimateurs e¢ caces. Une approche qui o¤re beaucoup de lumière dans la structure de l’e¢ cacité et la pn -consistance de l’estimateur pour les modèles semi paramétriques est basée sur les bornes d’information. Dans des modèles semiparamétrique on peut dé…nir une borne d’e¢ cacité pour les estimateurs analogue à la borne de Cramer-Rao pour les modèles paramétriques. Ces bornes ne se contentent pas de donner une référence pour mesurer l’e¢ cacité asymptotique d’estimateurs semi paramétriques, elles peuvent aussi suggérer des moyens de construire ces estimateurs.
Sous la structure LAN , un critère d’e¢ cacité asymptotique, souvent considéré dans la littéra-ture statistique, est le critère minimax asymptotique locale (voir Hajek (1972) pour l’exposé détaillé de la théorie et son histoire). Avant de présenter cette borne asymptotique, on donne la dé…nition d’un estimateur régulier.
Dé…nition 1.2.1
Une suite d’estimateurs fZng est dite -régulière, sous la condition LAN ( ; ( ); n( )) si p
1.2. CONCEPTS D’OPTIMALITÉ ASYMPTOTIQUE LOCALE i.e
p
n (Zn ) =) N(0; 1( )):
Hàjek (1972) avait donné une borne inférieure du risque encouru en prenant fZng comme suite d’estimateurs arbitraires du paramètre ; Fabian et Hannan ont étendu ces résultats. Théorème 1.2.1 (Local Asymptotic Minimax (LAM ) )
Soit fZng une suite d’estimateurs quelconques de , l une fonction de perte dé…nie sur R, supposons que la condition LAN ( ; ( ); n( )) est véri…ée alors :
lim
M !1lim infn!1 infZn
sup p
nj 0j M
E l pn(Zn ) El (Z) ; (1.2.2) où Z suit la N (0; 1( )):
L’appellation minimax est à cause de l’"inf sup". Une suite d’estimateurs fZng est dite LAM ( ) si on a l’égalité dans l’inéquation (1.2.2).
La formule précédente établit qu’aucun estimateur n’a une meilleur performance qu’un esti-mateur e¢ cace dans le sens de (1.2.1), pour cette raison on donne ce lemme démontré par Fabian et Hannan (1982) Thm 6.3 p.467.
Lemme 1.2.1
Sous la condition LAN , pour toute suite d’estimateurs (Zn);si (Zn)est -régulière alors (Zn) est LAM .
Remarque 1.2.1
Une di¢ culté surgit dans la construction du test et de l’estimateur : la valeur de ; sous l’hypothèse nulle, reste non spéci…ée. Bien entendu, la solution consiste à remplacer par un estimateur b(n) qui est pn-consistent et discret. Notons b(n)une suite d’estimateurs de : (i) b(n) estpn-consistent, i.e.
p
n b(n) = O(P )où encore 9c > 0, tel que pn b(n) c; 8n 2 N; 2 ;
(ii) Pour des raisons techniques, nous utilisons des suites discrètes d’estimateurs n telles que, si b(n) véri…e (i), n est donnée par un des points de l’ensemble :
= p1
n (i1; :::; ik) ; ij 2 Z le plus proche de b (n)
: Bien sûr, n satisfait la propriété plus générale de discrétisation.
Dé…nition 1.2.2
Une suite n d’estimateurs est dite discrète s’il existe K 2 N tel que, indépendamment de n 2 N, n prend au plus K valeurs di¤érentes dans l’ensemble
CHAPITRE 1. THÉORIE ASYMPTOTIQUE DE LECAM La condition de discrétisation est due à Lecam (1960), elle permet d’éviter certains compor-tements pathologiques. Cette condition est cependant sans aucune conséquence pratique : à n …xé, elle n’a pas de réelle signi…cation.
En…n, signalons que dans les di¤érents chapitres, nous allons utiliser une technique qui consiste à remplacer, dans des équations stochastiques, une suite de nombres réels par une suite de variables aléatoires. Cette technique est basée sur le lemme 4.4 de Kreiss (1987) que nous rappelons ici.
Lemme 1.2.2 (Kreiss (1987))
Supposons que T(n)( ) ; n2 N est une suite de variables aléatoires dépendant de 2 : Si pour toute suite de réels n (n)ovéri…ant
p
n (n) est bornée par une constante c > 0; on a T(n) (n)
= oP (1) ; alors aussi T(n) b (n)
= oP (1) est véri…ée pour toute suite d’estimateurs b(n) discrète et pn-convergente.
CHAPITRE
2
Modèle AutoRégressif EXPonentiel
EXP AR(p)
2.1
Introduction
Le modèle Autorégressif exponentiel, (EXP AR), appartient à la classe des modèles Au-torégressifs non linéaires. Il a été introduit par Ozaki (1978) et Haggan et Ozaki (1981) pour la modélisation et la prévision des données cycliques et pour reproduire quelques caractéris-tiques de la théorie des vibrations aléatoires non linéaires comme la fréquence dépendante de l’amplitude, les phénomènes de saut et les comportements de cycle limite. Il possède aussi plusieurs caractéristiques encourageantes, en e¤et, ozaki en (1993) a montré qu’un modèle EXP AR peut capturer les caractéristiques non gaussiennes de la série. Dans le même ou-vrage une relation étroite entre les modèles EXP AR et la famille exponentielle est souligné, ozaki a montré que pour une distribution donnée de la famille exponentielle on peut intro-duire un modèle EXP AR dont la distribution marginale est très proche de la distribution donnée. Plusieurs articles ont traités les problèmes de stationnarité, d’ergodicité géométrique, d’estimation, de prévision et de test pour ces modéles comme : Ozaki (1982; 1985), Tjøstheim (1986), Chan et Tong (1985), Al-Kassam et Lane (1989), Koul et Schick (1997) et Allal et El Melhaoui (2006), en plus cette classe de séries temporelles non linéaire a été appliquée avec succès dans plusieurs domaines comme en écologie (Haggan et Ozaki ; 1981, Priestley ; 1988), hydrologie (Ozaki ; 1985), signal vocal ( K. Ishizuka, H. Kato et T. Nakatani ; 2005) et macroéconomie (N. Terui et H.K. Van Dijk ; 1999, E. Amiri ; 2012).
CHAPITRE 2. MODÈLE AUTORÉGRESSIF EXPONENTIEL EXP AR(P ) Dans la section 2:1, on donne les dé…nitions de base de cycle limite, du point …xe et du modèle EXP AR (p) ainsi que les conditions de stationnarité stricte et d’ergodicité géomé-trique pour l’EXP AR (1) : L’estimation des paramètres est discutée à la section 2:2 avec plusieurs méthodes. En …n, dans la section 2:3, on présente le modèle EXP AR(1) restreint avec son estimation par les moindres carrés.
2.2
Modèles et dé…nitions de bases
2.2.1
Dé…nitions
Dans cette section on donne les dé…nitions explicites des points singuliers ou …xes et des cycles limites d’une équation (temporelle) de di¤érence discrète générale :
xt = f (xt 1; :::; xt p) : (2.2.1) Ces dé…nitions sont données par ozaki (1985) :
Dé…nition 2.1.1 Point singulier ou …xe.
Un point …xe de l’équation (2:2:1) est un point ; pour lequel chaque trajectoire de l’équation (2:2:1) commençant su¢ samment prés de l’approche soit pour t ! 1 ou t ! 1: Si la trajectoire approche pour t ! 1 on dit un point …xe stable, et si elle l’approche pour t ! 1 on dit un point …xe instable.
Dé…nition 2.1.2 cycle limite :
Un cycle limite de l’équation (2:2:1) est une trajectoire fermée isolée xt+1; :::; xt+q; où q est un entier positif.
"Fermée" signi…e que si les valeurs initiales (x1; :::; xp)appartiennent au cycle limite, alors (x1+kq; :::; xp+kq) = (x1; :::; xp) quelque soit l’entier k. Autrement dit la trajectoire fermée re-vient à la condition initiale après un certain temps. "Isolée" signi…e que toutes les trajectoires commençant su¢ samment prés du cycle limite l’approchent soit pour t ! 1 ou t ! 1 c’est à dire les trajectoires voisines ne sont pas fermées, elles spirales autour du cycle limite en s’en éloignant ou en s’en approchant. Si les trajectoires approchent le cycle limite pour t ! 1, le cycle est dit stable ou attractif sinon, il est dit instable. Le plus petit entier q qui satisfait la dé…nition 2:1:1 est appelé la période du cycle limite de l’équation (2:2:1). Ozaki (1985) a noté que le point …xe peut être considéré comme un cycle limite de période 1 mais il le distingue car il a une signi…cation physique di¤érente.
2.2.2
Modèles Autorégressifs Exponentiels
Les modèles Autorégressifs Exponentiels (EXP AR) ont une structure simple semblable aux modèles Autorégressif (AR) à part les coe¢ cients qui sont état-dépendants.
2.2. MODÈLES ET DÉFINITIONS DE BASES
Un processus univarié fXt; t2 Zg est dit suivre le modèle EXP AR (p), s’il est solution de l’équation aux di¤érences non linéaire stochastique de la forme :
Xt= p X
i=1
'i;1+ 'i;2exp Xt 12 Xt i+ "t; t2 Z; (2:2:2)
où f"t; t2 Zg est une suite de variables aléatoires indépendantes identiquement distribuées, de moyenne 0 et de variance …nie 2: > 0; '
i;1; 'i;2;pour i = 1; :::; p, sont des constantes et p est l’ordre du modèle. La non linéarité du processus vient de la forme exponentielle. Cette fonction rend la dynamique de la série localement linéaire, mais globalement non-linéaire. Les coe¢ cients autorégressifs sont dépendants de l’amplitude, ils dépendent de Xt 1.Ils changent de 'i;1+ 'i;2 à 'i;1 quand jXt 1j changent de zéro à +1. C’est à dire quand jXt 1j devient grand les coe¢ cients 'i;1+ 'i;2exp X2
t 1 ! 'i;1 pour i = 1; :::; p: Quand jXt 1j devient petit, les coe¢ cients 'i;1+ 'i;2exp Xt 12 ! 'i;1+ 'i;2 pour i = 1; :::; p: Le coe¢ cient non linéaire agit comme un facteur d’échelle qui modi…e l’e¤et de Xt 1 dans le terme exp X2
t 1 :
La Figure 2:2:1, montre la trajectoire simulée d’un processus Autorégressif Exponentiel, générée d’un EXP AR(1) avec n = 100; '1;1 = 0:8; '1;2 = 0:2; = 1 et "t N (0; 1) :
Figure 2:2:1
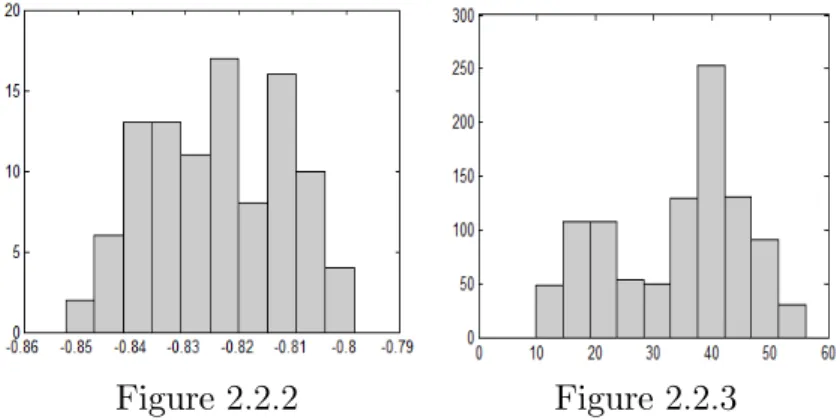
Les Figures 2:2:2 et 2:2:3 montrent les distributions marginales d’un EXP AR(1) avec n = 100; '1;1 = 0:8; '1;2 = 0:4; = 1et "t N (0; 0:1) pour la première …gure et n = 1000; '1;1 = 1; '1;2 = 0:5; = 1et "t N (0; 1) pour la deuxième …gure.
CHAPITRE 2. MODÈLE AUTORÉGRESSIF EXPONENTIEL EXP AR(P )
Figure 2:2:2 Figure 2:2:3
Haggan et Ozaki (1981) ont montré que le modèle EXP AR exhibe un comportement de cycle limite sous les conditions suivantes :
i) Toutes les racines de l’équation caractéristique
p '
1;1
p 1 ::: ' p;1 = 0
sont à l’intérieur du cercle unité. Par conséquent Xt commence à diminuer (amortir) quand jXt 1j est trop grand.
ii) quelques racines de l’équation : p ('
1;1+ '1;2)
p 1 ::: ('
p;1+ 'p;2) = 0
sont à l’extérieur du cercle unité. Par conséquent Xt commence à osciller et diverger pour les petites valeurs de jXt 1j :
Le résultat de ces deux e¤ets produit une oscillation auto-entretenue (self excited). La …gure 2:2:4 montre le cycle limite obtenu pour le modèle
Xt= 1:95 + 0:23 exp Xt 12 Xt 1 0:96 + 0:24 exp Xt 12 Xt 2+ "t;
avec "t N (0; 0:01) et où les coe¢ cients satisfont les conditions i) et ii) précédente (exemple cité dans Haggan et Ozaki (1981)).
2.2. MODÈLES ET DÉFINITIONS DE BASES
Les deux conditions précédentes sont nécessaires pour l’existence du cycle limite mais pas su¢ santes. La condition su¢ sante est :
iii) 1 p P i=1 'i;1 = p P i=1 'i;2 > 1 ou 1 p P i=1 'i;1 = p P i=1 'i;2 < 0:
Cette condition est exigée pour prévenir de l’occurrence d’un point singulier stable. Par exemple le modèle :
Xt= 1:8 + 4 exp Xt 12 Xt 1 0:97 + 0:1 exp Xt 12 Xt 2+ "t;
satisfait les conditions i) et ii) mais la trajectoire de Xt converge vers un point …xe ; voir …gure 2:2:5. On a
= 1:8 + 4 exp 2 0:97 + 0:1 exp 2 :
Dans ce cas, le point …xe existe parce que les coe¢ cients ne satisfont pas la condition iii) c’est à dire : 0 < 1 2 P i=1 'i;1 = 2 P i=1 'i;2 < 1 Figure 2:2:5
2.2.3
Conditions de stationnarité
Tjøstheim (1986), en estimant les paramètres avec la méthode des moindres carrés condition-nels, a donné une condition de stationnarité stricte et d’ergodicité pour le modèle EXP AR (1) Xt= '1;1+ '1;2exp Xt 12 Xt 1+ "t; (2.2.3) avec t 2 et X1 étant une variable initiale.
Théorème (stationnarité stricte, Tjøstheim (1986))
Soit Xt dé…nie par (2:2:3): Supposons que '1;1 + '1;2 < 1, et que "t a une fonction de densité avec un support in…nie. Alors il existe une distribution unique pour la variable initiale X1 tel que fXt; t 1gsoit strictement stationnaire et ergodique.
CHAPITRE 2. MODÈLE AUTORÉGRESSIF EXPONENTIEL EXP AR(P ) Pour la démonstration voir Tjøstheim (1986) page 257.
Une condition d’ergodicité géométrique a été donné par Chan et Tong (1985) pour le modèle EXP AR (1) :
Théorème (ergodicité géométrique, Chan et Tong (1985))
Le modèle EXP AR (1) dé…nie par (2:2:3) est géométriquement ergodique si '1;1 < 1: La démonstration est basé sur la décomposition de la fonction h(x) = '1;1+ '1;2exp ( x2) x en deux parties : h(x) = hh(x) + hd(x) où hh = '1;1x est une fonction continue et hd(x) = '1;2exp ( x2) xest une fonction bornée ensuite l’application du théorème 4.5 dans Chan et Tong (1985).
2.3
Estimation des modèles
EXP AR
2.3.1
Procédure d’estimation donnée par Haggan et Ozaki 1981
Nous allons présenter une description de la procédure d’estimation de l’EXP AR, proposé par Haggan et Ozaki (1981), et qui est considérée comme une référence naturelle pour les méthodes alternatives parce que la procédure est directe et aboutit toujours a une solution. L’estimation de l’ordre p; et des coe¢ cients ; 'i;1; 'i;2; i = 1; :::; p dans le modèle expo-nentiel (2:2:2) est une procédure d’optimisation non linéaire, impliquant toute les di¢ cultés de calcul propre à cette procédure. Cependant ce problème peut être surmonter en …xant le paramètre dans une grille de valeurs et estimer l’ordre et les autres paramètres en appli-quant une régression linéaire de Xt sur Xt j; Xt jexp Xt 12 ; j = 1; :::; p où Xt est la série centrée. Les valeurs de sont choisi de manière que exp X2
t 1 varie raisonnablement dans l’intervalle [0; 1] : L’ordre p est sélectionné en utilisant le critère AIC
AIC (p) = (n P ) logb2p+ 2 (2p + 1) ; où P est l’ordre maximal du modèle, n est le nombre d’observation et
b2p = b" 2 P +1+b" 2 P +2+ ::: +b" 2 n = (n P )
est l’estimateur des moindres carrés de la variance des résidus du modèle.
Les modèles sélectionnés pour chaque sont comparés en utilisant l’AIC pour trouver le meilleur modèle.
L’algorithme exige la pré-spéci…cation d’un intervalle [a; b] ; a 0; pour les valeurs de dans l’équation (2:2:2) : Cet intervalle sera partagé en M sous intervalles, de manière à avoir une grille de valeurs possibles de :Par exemple, si on prend l’intervalle [0; 10] tel que 0 < < 10;alors on aura une grille de 10000 points avec les valeurs 0:001; 0:002; :::; 10 comme solutions possibles.
2.3. ESTIMATION DES MODÈLES EXP AR (i) Poser = +
(ii) Estimer les paramètres 'i;1 et 'i;2 par les moindres carrés ordinaires par régression de Xt sur Xt 1; :::; Xt p; Xt 1exp Xt 12 ; :::; Xt pexp Xt 12 :
(iii) Calculer le critère d’Akaike AIC et répéter l’étape (ii) pour p = 1; :::; P; où P est un entier pré-spéci…é supérieur à 1.
Les paramètres sélectionnés sont ceux qui minimisent l’AIC.
2.3.2
Méthode des moindres carrés conditionnels
Tjøstheim (1986) a traité le problème d’estimation des séries temporelle non linéaire dans un cadre général. Son approche est basée sur le développement de Taylor de la fonction de pénalité générale qui est par la suite spécialisé à un critère de type moindres carrés conditionnelle (MCC) et maximum de vraisemblance (MV). Dans le cas des MCC son travail est une généralisation de l’approche de Klimko et Nelson (1978) au cas multivarié.
Théorème (Tjøstheim (1986))
Soit Xt dé…nie par (2:2:3) est strictement stationnaire et ergodique et supposons que E ("6
t) < 1: Alors il existe une suite d’estimateurs b'1;1;'b1;2;b minimisant la fonction pénalité Qn = n P t=2 Xt E Xt=Ft 1X 2 , où FX
t est la -algèbre générée par fXs; s tg ; et tel que b'1;1;'b1;2;b ! '1;1p:s ; '1;2; et 'b1;1;b'1;2;b est asymptotiquement normal c.à.d :
n1=2 b'1;1;'b1;2;b '1;1; '1;2; ! N 0;d 2U 1 : où U = 0 @ E X2 t 1 E exp Xt 12 Xt 12 E '1;2exp Xt 12 Xt 14 E exp X2 t 1 Xt 12 E exp 2 Xt 12 Xt 12 E '1;2exp 2 Xt 12 Xt 14 E '1;2exp X2 t 1 Xt 14 E '1;2exp 2 Xt 12 Xt 14 E '21;2exp 2 Xt 12 Xt 16 1 A : Preuve. Tjøstheim (1986) a démontré deux théorèmes (3.1) et (3.2) qui prouve l’existence
d’une suite d’estimateurs minimisant la fonction critère Qn, la convergence presque sur et la normalité asymptotique, pour des séries temporelles non linéaires. En véri…ant les conditions, C1-C3 et D1citées dans les théorèmes (3.1) et (3.2), il montre l’existence des estimateurs de MCC pour l’EXP AR(1).
Pour t 2, on a e Xt=t 1= E Xt=Ft 1X = '1;1+ '1;2exp X 2 t 1 Xt 1: (C1) : * @ eXt=t 1 @'1;1 = Xt 1 , @ eXt=t 1 @'1;2 = exp X 2 t 1 Xt 1, @ eXt=t 1 @ = '1;2exp X 2 t 1 Xt 13 :
CHAPITRE 2. MODÈLE AUTORÉGRESSIF EXPONENTIEL EXP AR(P ) Puisque Xtest strictement stationnaire alors E ("6
t) < 1 implique que E (Xt6) < 1 d’où : E 8 < : @ eXt=t 1 @'1;1 29= ;<1; E 8 < : @ eXt=t 1 @'1;2 29= ;<1 et E 8 < : @ eXt=t 1 @ 29= ;<1: * pour la même raison on a : E
8 < : @2Xe t=t 1 @'1;2@ 29= ;<1 et E 8 < : @2Xe t=t 1 @ 2 29= ;<1: (C2) :
Soit a1; a2 et a3 des nombres réels arbitraires. Alors E 0 @ a1 @ eXt=t 1 @'1;1 + a2 @ eXt=t 1 @'1;2 + a3 @ eXt=t 1 @ 21 A = 0 implique que a1 @ eXt=t 1 @'1;1 + a2 @ eXt=t 1 @'1;2 + a3 @ eXt=t 1 @ p:s = 0 d’où : Xt 1 a1+ exp Xt 12 a2 a3'1;2X 2 t 1 p:s = 0 puisque E(X2
t) E ("2t) > 0 (d’aprés la formule (2.2.3)) alors a1 = a2 = a3 = 0: (C3) : * @ eXt=t 1 @'1;1 @2Xet=t 1 @'1;2@ = exp X 2 t 1 Xt 14 ; @ eXt=t 1 @'1;1 @2Xet=t 1 @ 2 = '1;2exp X 2 t 1 Xt 16 ; * @ eXt=t 1 @'1;2 @2Xet=t 1 @'1;2@ = exp 2 X 2 t 1 Xt 14 ; @ eXt=t 1 @'1;2 @2Xet=t 1 @ 2 = '1;2exp 2 X 2 t 1 Xt 16 : * @ eXt=t 1 @ @2Xet=t 1 @'1;2@ = '1;2exp 2 X 2 t 1 Xt 16 ; @ eXt=t 1 @ @2Xet=t 1 @ 2 = ' 2 1;2exp 2 Xt 12 Xt 18 : * nXt Xet=t 1 o @3Xe t=t 1 @'1;2@ 2 (jXtj + jXt 1j) exp X 2 t 1 Xt 15 , car '1;1 + '1;2 < 1: * nXt Xet=t 1 o @3Xe t=t 1 @ 3 (jXtj + jXt 1j) '1;2exp X 2 t 1 Xt 17 : en utilisant le fait que xke x2
est bornée et E (X6
t) < 1 on véri…e que toutes les quantités précédentes sont majorées par des fonctions dont les espérances sont …nie.
2.3. ESTIMATION DES MODÈLES EXP AR La condition D1 est une implication de la condition C1:
Résultats de simulation :
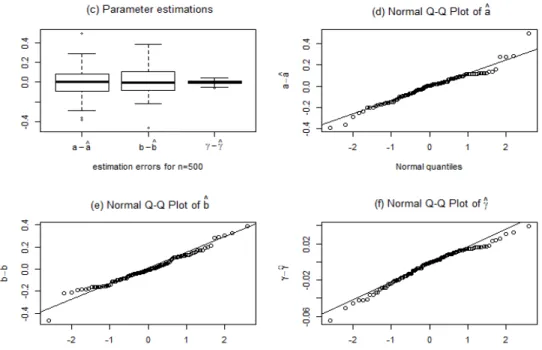
La performance de l’estimation par la méthode des moindres carrés conditionnels est montrée par simulation, le programme est pris du site "http ://perso.univ-lille3.fr/~cfrancq/Christian-Francq/R-Code/ Amendola-Francq/exparsim3.r". La série chronologique est générée à partir du modèle EXP AR (1) avec les paramètres '1;1; '1;2; = ( 0:8; 2; 0:1), pour la taille n = 500; et avec 100 répétitions monte carlo, la densité des erreurs est un mélange de loi normal. La performance de l’estimation est présentée par les boites à moustaches et les diagrammes quantile-quantile des erreurs d’estimation. Les erreurs d’estimation de '1;1; '1;2 et sont tous centrées à zéro. D’autre part les diagrammes quantile-quantile montrent que les erreurs d’estimation sont normales.
Figure 3:3:1 :Estimation de100 répétitions de simulation du modèle EXP AR (1) et n = 500.
2.3.3
Autres méthodes d’estimation
Dans le même article de (1986), Tjøstheim a démontré les théorèmes (5.1) et (5.2) qui donnent les estimateurs du maximum de vraisemblance (MV) ainsi que leurs propriétés asymptotique, pour les modèles de séries temporelles non linéaires générales. Il su¢ t d’appli-quer ces résultats aux modèle EXP AR en véri…ant les conditions E1 E3 et F 1. Amondela et Francq (2009) ont obtenu des résultats similaires, avec des conditions légèrement di¤érentes, en montrant l’existence des estimateurs quasi MV pour l’EXP AR (1) (page 30).
Shi et Aoyama (1997), Baragona et al. (2002) et Gurung (2013) ont utilisé l’algorithme génétique (AG) pour estimer les paramètres des modèles EXP AR(p). L’algorithme
géné-CHAPITRE 2. MODÈLE AUTORÉGRESSIF EXPONENTIEL EXP AR(P ) tique est une classe de procédures d’optimisation globale distinguée des autres techniques d’optimisation en utilisant des concepts de la génétique. Le principe de cette méthode mé-taheuristique est de partir d’une population initiale c’est à dire un ensemble de solutions du problème d’optimisation posé et qui forme la première génération ensuite la faire évoluer au sens darwinien : sélection naturelle, croisement et mutation jusqu’a obtenir une population relativement stable et ayant une adaptabilité (…tness cost) optimal (max /min) par rapport aux générations précédentes. Gurung (2013) ; en modélisant les données d’averse annuelles de l’Inde entre 1901 à 1995, a utilisé l’AG avec l’AIC comme fonction objective a minimisé et a identi…é l’EXP AR(1) comme étant le meilleur modèle. Ce dernier a été utilisé pour la prévision entre 1996 à 2003 et a montré sa supériorité par rapport au modèle ARIM A sélectionné pour les mêmes données.
Le modèle EXP AR appartient à la famille des modèles autorégressifs à coe¢ cient fonc-tionnels (F CAR), donc les méthodes d’estimations utilisées pour les F CAR sont applicables pour les modèles EXP AR, comme la méthode bayesienne dans Song et al (2014) et la tech-nique de régression linéaire locale dans Cai et al (2000).
Estimateur en temps réel Les procédures d’estimation proposés impliquent des di¢ cul-tés de calcul, par exemple la méthode du MV consomme beaucoup de temps et la fonction objective pour n’est pas convexe et plusieurs optimum locales peuvent exister, par consé-quent, il n’y a aucune garantie que l’algorithme converge à l’optimum globale (Shi et al (2001)). En plus, ces procédures ne sont pas approprié pour l’utilisation dans les systèmes industriels (processus de contrôle statistique) où la mémoire est importante par exemple Messaoud (2006) a modélisé ses données avec un EXP AR (40) et a estimé les 81 para-mètres avec la procédure d’estimation en temps réel. Le but important de cette approche est la détermination rapide du coe¢ cient non linéaire . L’estimation des autres coe¢ cients du modèle est seulement un problème de moindres carrés linéaire dès que est déterminé. Shi et al (1998) ont noté qu’en termes du mécanisme du modèle EXP AR pour révéler un cycle limite ou un comportement cyclique, le paramètre d’échelle prend le rôle d’ajuster les racines instantanées. Dés que l’état Xt 1 s’éloigne trop du point d’équilibre, les termes
'i;1+ 'i;2exp X2
t 1 dans le modèle EXP AR vont approché 'i;1:C’est à dire le terme non linéaire exp X2
t 1 doit approcher 0 de telle façon que le modèle résultant a toutes les racines inferieur à un pour forcer l’état suivant Xt à ne pas diverger plus loin. A partir de ce point de vue, Shi et al (2001) proposent une détermination heuristique du coe¢ cient non linéaire à partir de l’ensemble des données, et dé…nissent :
0 =
log max x2
i
où est un petit nombre (exp. = 0:0001), 1 i < N et N est la taille des données. Basé sur = 0, même si ce n’est pas optimal, le modèle EXP AR révélera toujours le comportement de cycle limite.
2.4. MODÈLE EXP AR(1) RESTREINT
2.4
Modèle
EXP AR(1) restreint
Koul et Schik (1997) ont établi la propriété de normalité asymptotique locale (LAN ) pour le modèle EXP AR (1) avec des paramètres appartenant à l’ensemble
= '1;1;'1;2; 2 R3 : '
1;1 < 1; > 0 : Mais, pour traiter le problème d’estimation e¢ cace (au sens localement asymptotiquement minimax) et pour éviter le cas singulier où le paramètre '1;2 = 0 ce qui implique que ne soit pas identi…able, ils ont travaillé avec le mo-dèle EXP AR (1) dans lequel est connu. Pour ce modèle = ] 1; 1[ R avec l’appellation EXP AR (1) restreint.
On donne les estimateurs des moindres carrées de l’EXP AR (1) restreint suivant : Xt= '1+ '2exp X
2
t 1 Xt 1+ "t; Lemme (Koul et Schik (1997))
Les estimateurs de MCO de l’EXP AR (1) restreint sont donnés par b '1 b '2 = 0 B B B @ n X t=1 X2 t 1 n X t=1 X2 t 1exp Xt 12 n X t=1 Xt 12 exp Xt 12 n X t=1 Xt 12 exp 2 Xt 12 1 C C C A 10 B B B @ n X t=1 Xt 1Xt n X t=1 Xt 1Xtexp Xt 12 1 C C C A: Preuve. La somme des carrées des résidus de ce modèle est donné par :
S = n X t=1 "2t = n X t=1 Xt '1+ '2exp Xt 12 Xt 1 2
On remarque que cette fonction objective à minimiser est linéaire par rapport aux para-mètres à estimer '1 et '2:
La valeurs de la fonction S est minimum lorsque ces dérivées par rapport à '1 et '2 s’annulent, on a : @S @'1 = n X t=1 Xt 1 Xt '1+ '2exp X 2 t 1 Xt 1 = 0 @S @'2 = n X t=1 Xt 1exp Xt 12 Xt '1+ '2exp Xt 12 Xt 1 = 0 On peut écrire ce système en utilisant la formule matricielle suivante :
0 B B B @ n X t=1 Xt 1Xt n X t=1 Xt 1Xtexp Xt 12 1 C C C A= 0 B B B @ n X t=1 X2 t 1 n X t=1 X2 t 1exp Xt 12 n X t=1 Xt 12 exp Xt 12 n X t=1 Xt 12 exp 2 Xt 12 1 C C C A '1 '2
CHAPITRE 2. MODÈLE AUTORÉGRESSIF EXPONENTIEL EXP AR(P ) Donc : b '1 b '2 = 0 B B B @ n X t=1 X2 t 1 n X t=1 X2 t 1exp Xt 12 n X t=1 X2 t 1exp Xt 12 n X t=1 X2 t 1exp 2 Xt 12 1 C C C A 10 B B B @ n X t=1 Xt 1Xt n X t=1 Xt 1Xtexp Xt 12 1 C C C A On véri…e que ce point est un minimum c’est-à-dire la Hessienne est dé…nie positive :
H = 0 B B B @ n X t=1 X2 t 1 n X t=1 X2 t 1exp Xt 12 n X t=1 X2 t 1exp Xt 12 n X t=1 X2 t 1exp 2 Xt 12 1 C C C A; et le déterminant est : det(H) = n X t=1 X2 t 1 n X t=1 X2 t 1exp 2 Xt 12 n X t=1 X2 t 1exp Xt 12 !2 > 0:
CHAPITRE
3
Test de la périodicité dans un modèle
EXP AR
Puisque le modèle autorégressif exponentiel périodique compte plus de paramètres que son analogue traditionnel et donc il est plus compliqué, il semble très important de tester la périodicité des paramètres du modèle EXP AR. Ce chapitre est consacré au test d’un modèle EXP AR classique contre un modèle EXP AR périodique. La démarche se fonde sur la théorie asymptotique des expériences statistique de Le Cam (1960; 1986). Nous exploitons la propriété LAN , et ces conséquences : la convergence faible des expériences statistiques, la contiguïté et la linéarité asymptotique locale pour construire un test optimale au sens "most stringent".
3.1
Notations, Dé…nitions et conditions de régularités
3.1.1
Dé…nitions et notations principales
Un processus fXt; t2 Zg est dit suivre le modèle Autorégressif exponentiel d’ordre un restreint EXP AR (1), s’il est solution de l’équation aux di¤érences non linéaire stochastique de la forme :
CHAPITRE 3. TEST DE LA PÉRIODICITÉ DANS UN MODÈLE EXP AR où '1 est le paramètre d’autorégression linéaire, '2 et > 0sont les paramètres d’autoré-gression non linéaire et f"t; t2 Zg est un processus bruit blanc, i.e., une suite de variables indépendantes identiquement distribuées, de moyenne 0 et de variance 2, avec une densité de probabilité f (:), pas nécessairement gaussienne.
Un processus fXt; t2 Zg est dit suivre le modèle Autorégressif exponentiels Périodique restreint P EXP AR (1) ; de période S (S 2), s’il est solution de l’équation aux di¤érences non linéaire stochastique périodique de la forme :
Xt= 't;1+ 't;2exp Xt 12 Xt 1+ "t; t2 Z; (3:1:2) où f"t; t 2 Zg est un processus bruit blanc, i.e., une suite de variables indépendantes identiquement distribuées, de moyenne 0 et de variance …nie 2
t, avec une densité de pro-babilité f t(:), pas nécessairement gaussienne. Les paramètres Autorégressifs 't;1 et 't;2, la variance des innovations 2t sont périodiques, dans le temps, de période S, i.e.,
't+kS;j = 't;j et 2
t+kS = 2t , 8k; t 2 Z et j = 1; 2.
Dans ce travail, la variance des innovations est considérée être un paramètre invariant dans le temps, i.e., 2
t = 2.
La Figure 3:1:1, montre la trajectoire simulée d’un processus Autorégressif Exponentiel Périodique, générée d’un P EXP AR(1)S avec n = 200; S = 2; 't;1 = (0:8; 0:2)0; 't;2 = (0:3; 0:7)0; t = (0:8; 1)0 , 2t = (1; 1)0et "t N (0; 2t) ainsi que sa distribution marginale …gure 3:1:2.
3.1. NOTATIONS, DÉFINITIONS ET CONDITIONS DE RÉGULARITÉS
Figure 3:1:2
Notons Hf(n) ' une suite d’hypothèse nulle sous laquellenXt(n); t2 Zo est une suite de réalisations d’un processus satisfaisant le modèle non périodique (3:1:1) ; où ' = ('1; '2)0 et Hf(n) '(n) la suite des hypothèses alternative sous laquelle la suitenX(n)
t ; t2 Z o
est une suite de réalisations d’un processus satisfaisant le modèle périodique (3:1:2) ; où
avec '(n)= '(n) 1 ; ' (n) 2 ; :::; ' (n) S , '(n) s = '1+ 1 pn (n)1 + h (n) s;1 ; '2+ 1 pn (n)2 + h (n) s;2 0 ; s = 1; :::; S, tel que sup
n (n) 1 + h (n) s;1 2+ (n) 2 + h (n) s;2 2 <1:
Les h(n):1 = h(n)1;1; h(n)2;1; :::; h(n)S;1 0 et h(n):2 = h(n)1;2; h(n)2;2; :::; h(n)S;2 0 peuvent être interpréter comme des perturbations périodiques des paramètres non périodiques '1 et '2; respectivement, tel que
S P s=1
h(n)s;j = 0; pour j = 1; 2. En considérant les notations :
= '0; '0; :::; '0 0 où ' = (' 1; '2)0; (n)= (n)0; h(n)0 0 où = (n) 1 ; (n) 2 0 et h(n)= h(n)01 ; :::; h(n)0S 1 0
avec h(n)0s = h(n)s;1; hs;2(n) 0; s = 1; ::; S 1;et soit (n)la matrice de dimension 2S 2Sdonnée par (n) = p1
CHAPITRE 3. TEST DE LA PÉRIODICITÉ DANS UN MODÈLE EXP AR K = 0 B B B @ I2 2 .. . I2(S 1) 2(S 1) I2 2 I2 2 I2 2 : : : I2 2 1 C C C A;
on peut aisément réécrire les hypothèses alternatives sous la forme Hf(n) + (n) (n) .
3.1.2
Hypothèses de régularités techniques
A travers ce chapitre nous faisons les hypothèses suivantes :
Hypothèse (H1) : Les paramètres autorégressifs exponentiels ' satisfont la condition de cau-salité du (3:1:1) ; i.e., j'1j < 1; '2 2 R;
Hypothèse (H2) : La densité des innovations f (:)
.
est supposée satisfaire les conditions sui-vantes :(a) f (x) > 0; 8x 2 R,
(b) f (:)est absolument continue par rapport à la mesure de Lebesgue :il existe une fonction f (:)
.
tel que, pour 1 < a < b < 1; nous avonsf (b).
f (a) =.
b R a
.
f (x) d (x), (c) L’information de Fisher I (f ) = R f(x) 2f (x) dxest …nie, où f =
.
f (:) f (:), (d) Rxf (x) dx = 0
.
et la variance est …nie, i.e., 2 = E ("2t) < 1:
On note que les deux conditions (b) et (c) impliquent la di¤érentiablilité en moyenne qua-dratique de la fonction f (:)12. i.e.,
lim !0 2R 0 @f12 (x + ) f 1 2 (x) : f (x) f 1 2 (x) 1 A 2 dx = 0:
3.2
Normalité Asymptotique Locale du modèle
P EXP AR(1)
restreint
Le contexte historique, qui a introduit cette notion, était la convergence faible des ex-périences statistique et la première formulation remonte à Wald (1943). Depuis les années 1960, ce concept a connu un développement considérable et sophistiqué dû à Le Cam, qui a introduit le terme de Normalité Asymptotique Locale (LAN ). cette propriété traduit deux idées : la première est que l’information amenée par l’observation est su¢ sante pour produire des estimateurs assez précis des paramètres du modèle et la deuxième traduit le fait que dans
3.2. NORMALITÉ ASYMPTOTIQUE LOCALE DU MODÈLE P EXP AR(1) RESTREINT
un voisinage de ces paramètres, la famille de probabilité peut être approché assez …nement par une expérience gaussienne de nature plus simple.
La propriété de normalité asymptotique locale est à la base de plusieurs résultats de recherche liés à l’étude des modèles de séries temporelles, nombreux chercheurs se sont inté-ressés à la dérivation de la propriété LAN pour divers modèles. On cite notamment : Roussas (1979)pour les modèles Autorégressifs d’ordre un, Akritas et Johnson (1982) pour le modèle autorégressif général, Swensen (1985), qui en démontrant la propriété LAN pour les modèles ARavec tendance linéaire, a donné un résultat fort et très utilisé, il s’agit du lemme qui per-met d’avoir cette propriété en véri…ant six conditions su¢ santes, Kreiss (1987) pour le modèle ARM A, Linton (1993) pour les modèles ARCH, Bengabrit et Hallin (1998) pour les modèles bilinéaires, Bentarzi et Hallin (1996) pour les modèles AR périodiques, Garel et Hallin (1995) pour les modèles ARM A multivariés, Koul et schick (1996; 1997) pour le modèle AR d’ordre un à coe¢ cient aléatoire, le modèle SET AR(2; 1; 1) et le modèle EXP AR (1), Bentarzi et Merzougui (2009; 2010) pour les modèles P SET AR(2; 1; 1)S et P ARCH(q)S...etc.
3.2.1
Suite de Rapports de Vraisemblance
Notons X(n)= X1(n); :::; Xn(n) une réalisation de taille …nie n d’un processus n
Xt(n); t2 Zo satisfaisant le modèle EXP AR (1) restreint (3:1:1) et soit X0(n) la valeur initiale dont les den-sités sont g(n)0 X (n) 0 ; '; et g (n) 0 X (n) 0 ; '(n); sous H (n) f ' et H (n) f ' (n) , respectivement. En plus, on suppose que g(n)0 X0(n); '(n); g(n)
0 X
(n)
0 ; '; converge en probabilité vers 0; quand '(n)
! ' avec n ! 1. Supposons, pour simpli…er les notations, que la taille de la série temporelle observée n est un multiple de S, i.e.,n = mS; m 2 N et soit t = s + S ; s = 1; :::; S et = 0; 1; :::m 1. On note par Zt(n) ' et Zt(n) '(n) ; t
2 Z, les résidus calculés sous Hf(n) ' et Hf(n) '(n) , respectivement. Alors, nous avons
Zs;r(n) ' = Xs+rS(n) h '1+ '2exp Xs+rS 1(n)2 iXs+rS 1(n) ; et Zs;r(n) '(n) = Xs+rS(n) '1+ p1 n (n) 1 + h (n) s;1 + '2+ 1 p n (n) 2 + h (n) s;2 exp Xs+rS 12 X (n) s+rS 1 = Zs;r(n) ' 1 p n h (n) 1 + h (n) s;1 + (n) 2 + h (n) s;2 exp Xs+rS 12 i Xs+rS 1(n) = Zs;(n) ' 1 p n (n)0 s X(n)s+rS 1 = Zs;(n) ' (n)s;r; où
CHAPITRE 3. TEST DE LA PÉRIODICITÉ DANS UN MODÈLE EXP AR (n) s = (n)1 + h (n) s;1; (n) 2 + h (n) s;2 0 ; et où X(n)s+rS 1 = Xs+rS 1(n) ; X (n)s+rS 1exp Xs+rS 12 0 et (n)s;r = 1 p n (n)0 s X(n)s+rS 1; s = 1; :::; S: La variance empirique correspondante est donnée par b2 = n 1
n P t=1 Zt(n) ' 2 : Alors, le logarithme du rapports de vraisemblance, (n)f '(n) = (n)
f +
(n) (n) pour Hf(n) ' contre Hf(n)('(n)), est alors donné, pour n = mS, par :
(n) f + (n) (n) = PS s=1 m 1P =0 log f Zs;(n) '(n) f Zs;(n) ' + log g(n)0 X0(n); '(n); g0(n) X0(n); '; ;
par conséquent, nous avons, sous Hf(n) ' ; l’approximation asymptotique locale : (n) f + (n) (n) = PS s=1 m 1P =0 log f Zs;(n) '(n) f Zs;(n) ' + 0P (1) ; = S P s=1 m 1P =0 h log f Zs;(n) ' (n)s; log f Zs;(n) ' i + 0P(1) : où le terme 0P(1) correspond à l’in‡uence de la valeur initiale X0(n):
3.2.2
Normalité Asymptotique Locale
A…n d’adapter les conditions de Swensen pour traiter le modèle EXP AR (1) restreint périodique, nous avons besoin des variables suivantes :
(n) s+rS ' = f 1=2 Zs;r(n) ' f1=2 Zs;r(n) ' (n)s;r 1; (n) s+rS ' = 1 2 Z (n) s;r ' (n)s;r = 1 2 (n)0 s;r (n) s où (n)s;r = p1 n Z (n) s;r ' X(n)s+rS 1; (n) ' = ( (n)0 1 ; :::; (n)0 S )0 2 R2S où (n)s = p1 n m 1P r=0 Zs;r(n) ' X(n)s+rS 1; s = 1; ::; S; (n) s;1 = 1 p n m 1P r=0 Zs;r(n) ' Xs+rS 1(n) et (n)s;2 = 1 p n m 1P r=0 Zs;r(n) ' Xs+rS 1(n) exp Xs+rS 1(n)2 : (3:2:1)