Modélisation et simulation d’une chaîne de conversion éolienne de petite puissance à axe horizontal
Texte intégral
Figure
![Figure 1.8 : Coefficient de puissance aérodynamique en fonction de λ et de l’angle de pas des pales [05]](https://thumb-eu.123doks.com/thumbv2/123doknet/2029961.4054/26.892.167.730.661.1066/figure-coefficient-puissance-aerodynamique-fonction-l-angle-pales.webp)
![Figure 1.13 : Système éolien basé sur la machine asynchrone à cage à fréquence variable [09]](https://thumb-eu.123doks.com/thumbv2/123doknet/2029961.4054/31.892.110.804.252.403/figure-systeme-eolien-base-machine-asynchrone-frequence-variable.webp)
![Figure 1.14 : Système éolien basé sur la machine asynchrone double alimentation- régulation de la vitesse de rotation par chaîne rotor alimentation [09]](https://thumb-eu.123doks.com/thumbv2/123doknet/2029961.4054/32.892.106.809.133.337/figure-systeme-eolien-asynchrone-alimentation-regulation-rotation-alimentation.webp)
![Figure 1.19 : Structure éolienne à base d’un hacheur en aval du pont de diodes [15]](https://thumb-eu.123doks.com/thumbv2/123doknet/2029961.4054/36.892.118.796.715.874/figure-structure-eolienne-base-hacheur-aval-pont-diodes.webp)
![Figure 2.1 : Carte annuelle de la vitesse moyenne du vent à 10m du sol (m/s) en Algérie [18]](https://thumb-eu.123doks.com/thumbv2/123doknet/2029961.4054/41.892.120.777.245.716/figure-carte-annuelle-vitesse-moyenne-vent-sol-algerie.webp)
Documents relatifs
Le but de ce travail est de faire une étude sur le système de conversion de l’énergie cinétique du vent en énergie électrique.
Dans ce dernier chapitre, nous avons étudié la chaine de conversion éolienne avec chaque type de vent : aléatoire, fixe et variable, à base de machine synchrone et/ou
Notre travail consiste dans la première étape à la modélisation de la chaine de conversion de l’énergie éolienne où la génératrice asynchrone à double alimentation fonctionne
Notre travail consiste dans la première étape à la modélisation de la chaine de conversion de l’énergie éolienne où la génératrice asynchrone à double alimentation
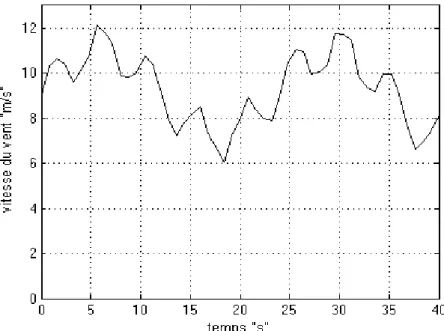
mathématique pour chaque partie du système, en commençant par le vent qui la source principale d’énergie, en passant par la turbine éolienne sur laquelle se base notre
Soit une éolienne, dont le diamètre des pales est 40 mètres (une telle éolienne fait ~ 100 mètres de hauteur!), exposée à un vent de 30km/h.. Le rendement de la turbine est 95%,
Résumé - Dans cet article, nous étudions la modélisation et la commande d’une génératrice synchrone à aimants permanents associée à une chaîne de conversion
Ce travail présente une technique de commande par logique floue appliquée au système de conversion d'énergie éolienne moyenne puissance équipée d'une génératrice
