Pépite | Évaluation des mobilités et modélisation géométrique du système pelvien féminin par analyse d’images médicales
148
0
0
Texte intégral
(2) Thèse de Zhifan Jiang, Lille 1, 2017. © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
(3) Thèse de Zhifan Jiang, Lille 1, 2017. Remerciements À Mathias Brieu, Jean-François Witz, Pauline Lecomte-Grosbras, Christian Duriez, Jeremie Dequidt et Stéphane Cotin, permettez-moi d’inscrire vos noms en tête de cette thèse ; car c’est à vous, surtout, que j’en dois l’achèvement. Acceptez donc ici ma gratitude, qui, si grande qu’elle puisse être, j’espère, sera à la hauteur de vos implications et encadrements. Je suis reconnaissant à mes encadrants de thèse de leurs soutien et patience, tout au long de cette odyssée, remplie de soleils et parfois de bourrasques. À Mathias Brieu, je te remercie de m’avoir offert cette opportunité d’intégrer le Laboratoire de Mécanique de Lille et de découvrir le domaine de bio-mécanique. Tes conseils et ton professionnalisme m’ont permis de me développer et continuer sur cette voie de la recherche. À Christian Duriez, je te remercie d’avoir encadré ma thèse en tant que co-directeur. C’est grâce à tes conseils, tolérances et motivations que cette thèse a pu arriver au bout. Une grande gratitude pour tes encouragements, tant sur le plan professionnel que personnel, au delà de l’encadrement de thèse. À Stéphane Cotin, merci de m’avoir accueilli au sein de l’équipe de l’INRIA pour commencer cette thèse. Merci aussi de m’avoir accompagné et guidé jusqu’à la fin, malgré la délocalisation de l’équipe de recherche. À Jean-François Witz, un grand merci pour tes implications ininterrompues durant ces années. Merci de m’avoir beaucoup aidé dans mes travaux grâce à ta culture profonde en sciences et en technologies. Merci pour le partage de ta vision de la recherche scientifique avec les doctorants. Merci à Jeremie Dequidt, pour avoir suivi mes travaux en consacrant du temps sur l’aspect scientifique et administratif. Un grand merci de m’avoir proposé le poste ATER et de m’avoir beaucoup formé pour les tâches d’enseignements. À Pauline Lecomte-Grosbras, merci pour tes nombreux efforts concernant les résultats du recalage d’images et pour la relecture soigneuse de mes rapports, publications et manuscrit. Je tiens à adresser mes remerciements aux rapporteurs Marc François et Emmanuel Promayon d’avoir accepté de relire mon manuscrit et avoir apporté des conseils constructifs à ce travail. Particulièrement, les travaux innovants de Marc François et Julien Réthoré, ont constitué un bon début pour l’aboutissement de cette thèse. À Zhi-Qiang Feng, je vous remercie d’avoir accepté d’être le président de mon jury de soutenance. Merci du temps que vous avez accordé et de l’intérêt que vous avez porté à cette thèse. Un grand merci au Professeur Michel Cosson et au Docteur Chrystèle Rubod du Centre Hospitalier Régional Universitaire (CHRU) de Lille, d’avoir financé cette thèse et d’avoir montré son intérêt médical grâce à vos connaissances et visions de la médecine et de la recherche. Merci à toute l’équipe de gynécologues et de radiologues, qui nous ont accordé du temps précieux et fourni des données issues de l’imagerie médicale. Merci à toute l’équipe « Shacra », et plus récemment « Defrost » de l’INRIA pour tous les bons moments. Aux organisateurs actifs des « afterworks », Hugo Talbot, Mario Sanz Lopez et Eulalie Coevoet. Merci à Nazim Haouchine, notre capitaine de foot-team. À tous les doctorants de la génération « Shacra » avec qui j’ai eu la chance de travailler : Alexandre Bilger, Vincent Majorczyk, Julien Bosman, Hadrien Courtecuisse et Guillaume Kazmitcheff, je vous remercie de tous ces rires inoubliables, de la bonne ambiance de l’équipe, en vous souhaitant i. © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
(4) Thèse de Zhifan Jiang, Lille 1, 2017. ii une bonne continuation dans la recherche. J’ai eu aussi le bonheur d’avoir connu la genèse de l’équipe « BioTim » à l’École Centrale de Lille. À Annie Morch, Laure Astruc, Xavier Boidin, Olivier Mayeur et Laurent Patrouix, je vous remercie d’avoir partagé la passion pour la bio-mécanique, mais aussi pour vos aides importantes sur mon manuscrit et sur ma présentation. Je tiens à remercier Olivier Mayeur, surtout, de son assistance continue tant sur la modélisation et la simulation que la rédaction, sans parler de nombreuses discussions intéressantes aux pause-cafés. Ce fut réellement une belle ambiance d’équipe et je suis honoré de connaître autant de sujets pertinents. Grâce au contexte multidisciplinaire de cette thèse, j’ai eu aussi la chance de partager l’expérience avec les jeunes mécaniciens du Laboratoire de Mécanique de Lille. Merci aux chers collègues du bureau B16 : Rian Seghir, Mouhamadou Diallo, Romain Mandard, Pierre Baudoin, Robi Wang, Long Wang, Emmanuel Berté et Médéric Langlois. Merci à Jérôme Hosdez et Grégory Hauss pour les corrections d’orthographe de mon manuscrit, bien que vous ne travailliez pas sur les sujets bio-mécaniques. Merci aussi à mes amis, Shiqi Cheng, Liu Liu, Xin Yan, Yiquan Zhou, Chengyu Zhong et tous ceux qui ne sont pas sur cette liste exhaustive, pour avoir apaisé mon angoisse quand j’ai rencontré des difficultés. Avant la clôture de mes remerciements, je souhaite adresser un fort remerciement à mes parents pour leurs soutiens incessants durant des années, à ma cousine, Yibai Zhao pour ses encouragements, à qui je dois beaucoup d’admirations et avec qui je n’ai pas pu partager assez de bons moments en raison de la distance.. À tous ceux qui aspirent à faire rayonner la recherche.... © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
(5) Thèse de Zhifan Jiang, Lille 1, 2017. Résumé Évaluation des mobilités et modélisation géométrique du système pelvien féminin par analyse d’images médicales. Résumé : Le meilleur traitement des troubles des mobilités du système pelvien féminin est un enjeu de société concernant particulièrement les femmes âgées. C’est dans ce contexte que cette thèse porte sur le développement des méthodes d’analyse d’images médicales permettant d’évaluer les mobilités pelviennes et modéliser les géométries des organes pelviens. Pour ce faire, nous proposons des solutions reposant sur le recalage des modèles déformables sur des images, issues de la technique d’Imagerie par Résonance Magnétique (IRM). L’ensemble des résultats permet, à partir d’IRM, spécifiquement à chaque patiente, de détecter la forme et de quantifier le mouvement d’une part des organes et de reconstruire leurs surfaces. Ce travail facilite la simulation du comportement des organes pelviens par la méthode des éléments finis. L’ensemble des outils développés a pour objectif d’aider à comprendre le mécanisme des pathologies. Ceci permettra enfin de mieux prédire l’apparition de certaines d’entre elles, de préciser et personnaliser les procédures chirurgicales. Mots clés : IRM, Segmentation et Recalage d’images, Image virtuelle, Optimisation, Mobilités du système pelvien, Modélisation géométrique de surface Evaluation of mobility and geometric modeling of female pelvic system by medical image analysis. Abstract : The better treatment of female pelvic mobility disorders has a social impact affecting particularly aged women. It is in this context that this thesis focuses on the development of methods in medical image analysis, for the evaluation of pelvic mobility and the geometric modeling of the pelvic organs. For this purpose, we provide solutions based on the registration of deformable models on Magnetic Resonance Images (MRI). All the results are able to detect the shape and quantify the movement of a part of the organs and to reconstruct their surfaces from patient-specific MRI. This work facilitates the simulation of the behavior of the pelvic organs using finite element method. The objective of these developed tools is to help to better understand the mechanism of the pathologies. They will finally allow to better predict the presence of certain diseases, as well as make surgical procedures more accurate and personalized. Keywords : MRI, Image segmentation and registration, Virtual image, Optimization, Pelvic system mobility, Geometric surface modeling. iii. © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
(6) Thèse de Zhifan Jiang, Lille 1, 2017. Table des matières INTRODUCTION GÉNÉRALE. 1. 1 IMAGES MÉDICALES ET SES APPLICATIONS 1.1 Contexte général . . . . . . . . . . . . . . . . . . . . 1.2 Images médicales . . . . . . . . . . . . . . . . . . . . 1.3 IRM et le diagnostic des pathologies pelviennes . . . 1.4 Utilisations d’analyse d’images médicales . . . . . . . 1.5 Conclusions . . . . . . . . . . . . . . . . . . . . . . .. AUX . . . . . . . . . . . . . . . . . . . .. PATHOLOGIES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . .. 3 5 12 20 22 31. 2 DÉTECTION DES CONTOURS PAR MODÉLISATION ANALYTIQUE 2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2 Choix de la représentation des géométries . . . . . . . . . . . . . . . . . . . . . 2.3 Données d’images . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4 Principe de la méthode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.5 Modèle de B-spline des organes . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.6 Génération de l’image virtuelle . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.7 Fonction-objectif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.8 Optimisation numérique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.9 Résultats et discussions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.10 Conclusions et Perspectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . .. 33 35 36 42 43 45 48 54 56 61 64. 3 ANALYSE DE LA CINÉMATIQUE DU SYSTÈME PELVIEN 3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2 Notions de mécanique pour l’analyse des mobilités . . . . . . . . . . 3.3 Méthode de suivi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.4 Calcul des champs de déplacements et de cisaillement . . . . . . . . 3.5 Validation et comparaison des méthodes . . . . . . . . . . . . . . . . 3.6 Applications de la méthode . . . . . . . . . . . . . . . . . . . . . . . 3.7 Conclusions et Perspectives . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . .. 65 67 69 72 78 80 86 90. 4 RECONSTRUCTION ET MODÉLISATION DES ORGANES PELVIENS EN 3-DIMENSIONS 4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2 Principe de la méthode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3 Validation du concept de la méthode . . . . . . . . . . . . . . . . . . . . . . . . . 4.4 Application à la reconstruction à partir d’images médicales . . . . . . . . . . . . 4.5 Résultats sur la reconstruction du système pelvien complet . . . . . . . . . . . . 4.6 Applications logicielles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.7 Conclusions et Perspectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 93 95 96 99 106 112 116 119. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. iv. © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
(7) Thèse de Zhifan Jiang, Lille 1, 2017. TABLE DES MATIÈRES CONCLUSION GÉNÉRALE. v 121. A Annexe 123 A.1 Description détaillée de la norme DICOM . . . . . . . . . . . . . . . . . . . . . . 124 A.2 Projection de courbe Bézier sur B-spline . . . . . . . . . . . . . . . . . . . . . . . 124 BIBLIOGRAPHIES. © 2017 Tous droits réservés.. 127. lilliad.univ-lille.fr.
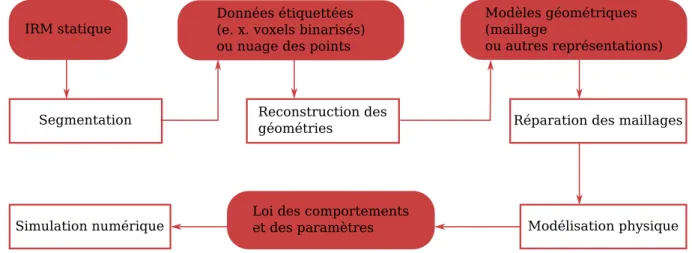
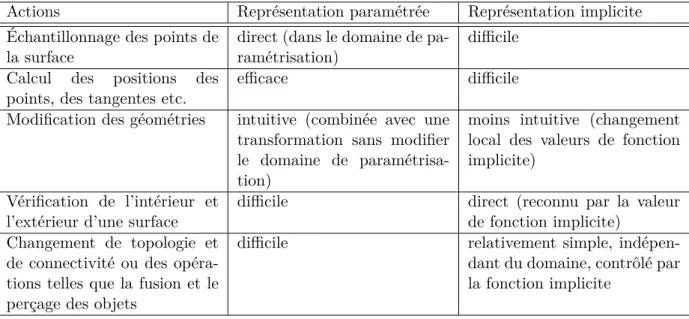
(8) Thèse de Zhifan Jiang, Lille 1, 2017. Table des figures 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 1.10 1.11 1.12 1.13 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 2.10 2.11 2.12 2.13 2.14 2.15 2.16 2.17 2.18 2.19 2.20. 3.1. Vue latérale gauche de la région pelvienne féminine. . . . . . . . . . . . . . . . . Mobilité normale du système pelvien féminin et les prolapsus génitaux. . . . . . Génération des géométries à partir de l’image IRM. . . . . . . . . . . . . . . . . Résultats de simulation d’une patiente saine sous effort de poussée. . . . . . . . . Résultats du recalage d’images IRM dynamiques. . . . . . . . . . . . . . . . . . . Illustration du scanner à rayons X. . . . . . . . . . . . . . . . . . . . . . . . . . . Image TEP du cerveau. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Illustration des moments magnétiques sous un champ magnétique (aimantation relaxation). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Plans anatomiques et orientation d’images IRM. . . . . . . . . . . . . . . . . . . Examen d’IRM et images IRM dynamiques. . . . . . . . . . . . . . . . . . . . . . Chaîne de traitements classique dédiée à la simulation . . . . . . . . . . . . . . . Vue générale de notre chaîne de traitements dédiée à la simulation. . . . . . . . . Schéma général du recalage d’images. . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . et . . . . . . . . . . . .. Illustration d’un cercle paramétré (gauche) et implicite (droite). . . . . . . . . . . . . Modèles discrets. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Cas de maillages non-manifolds. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Exemple de la reconstruction de la vessie. . . . . . . . . . . . . . . . . . . . . . . . . IRM dynamique et statique. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Le principe de la méthode du recalage. . . . . . . . . . . . . . . . . . . . . . . . . . . Exemple des fonctions B-splines. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Propriété de localité (par morceaux) de B-splines. . . . . . . . . . . . . . . . . . . . Illustration du profil d’intensité (fonction « level set »). . . . . . . . . . . . . . . . . Définition et position du profil d’intensité (fonction « level set »). . . . . . . . . . . . Démonstration de l’optimisation du déphasage en cas de 1D. . . . . . . . . . . . . . Démonstration des résultats avec trois différents nombres d’échantillonnage. . . . . . Démonstration des trois configurations de la fonction « level set » en faisant varier l’amplitude de niveau de gris. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Démonstration des trois configurations de la fonction « level set » en faisant varier l’épaisseur. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Génération de l’image virtuelle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Illustration de l’optimisation (Contours associés à la fonction-objectif). . . . . . . . . Illustration de la convergence de la descente du gradient. . . . . . . . . . . . . . . . . Résultats de la détection des contours. . . . . . . . . . . . . . . . . . . . . . . . . . . Mesure de l’erreur entre deux contours. . . . . . . . . . . . . . . . . . . . . . . . . . Différentes exceptions de détection à cause des effets indésirables présents dans les images. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Description d’un milieu continu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 5 7 9 10 11 13 14 16 18 21 22 23 28 37 38 39 41 43 44 46 48 49 50 51 52 52 53 55 59 60 62 63 63 70. vi. © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
(9) Thèse de Zhifan Jiang, Lille 1, 2017. Table des figures. vii. 3.2 3.3 3.4 3.5 3.6 3.7 3.8. 73 75 76 77 77 79. 3.9 3.10 3.11 3.12 3.13 3.14 3.15 3.16 3.17 3.18 3.19 3.20 3.21 4.1 4.2 4.3 4.4 4.5. 4.6 4.7 4.8 4.9. 4.10 4.11 4.12 4.13 4.14. © 2017 Tous droits réservés.. Principe de la méthode de suivi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Choix des points matériels le long du contour B-spline. . . . . . . . . . . . . . . . . . Le modèle des contours ajusté à l’instant 0 (image générée par notre application). . Résultat de suivi des points « features » par flot optique. . . . . . . . . . . . . . . . Recalage du modèle de l’instant t à l’instant t + 1. . . . . . . . . . . . . . . . . . . . Illustration de calcul de déplacement et de cisaillement. . . . . . . . . . . . . . . . . Validation de l’algorithme de suivi : contour de l’orange détecté pour un déplacement imposé de 10, 50 et 90 mm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Validation du calcul de déplacements. . . . . . . . . . . . . . . . . . . . . . . . . . . Validation statistique du calcul de déplacements. . . . . . . . . . . . . . . . . . . . . Comparaison de l’angle de rotation calculé par les deux méthodes. . . . . . . . . . . Validation statistique du calcul de l’angle de rotation. . . . . . . . . . . . . . . . . . Comparaison visuelle des deux méthodes dans un cas réel de mobilité normale. . . . Comparaison quantitative des deux méthodes dans un cas réel de mobilité normale. Évaluation quantitative des déplacements pour un cas d’hypermobilité. . . . . . . . Évaluation quantitative des déplacements pour un cas d’hypomobilité. . . . . . . . . Représentation spatio-temporelle du cisaillement (mobilité normale). . . . . . . . . . Représentation spatio-temporelle du cisaillement (hypomobilité). . . . . . . . . . . . Représentation spatio-temporelle du cisaillement (hypermobilité). . . . . . . . . . . . Artefacts typiques dans un cas d’hypermobilité. . . . . . . . . . . . . . . . . . . . . . Recalage 3D sur une séquence dynamique via un modèle de simulation. . . . . . . .. 80 81 81 82 83 84 85 86 87 88 89 89 90 91. Principe de la méthode de reconstruction géométrique. . . . . . . . . . . . . . . . . . 96 Création de la géométrie synthétique. . . . . . . . . . . . . . . . . . . . . . . . . . . 100 Génération de l’image synthétique : résolution d’image 100 × 100 × 100 pixels et taille de pixel 1 mm pixel−1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101 Illustration visuelle de l’optimisation pour le changement d’échelles. . . . . . . . . . 103 Illustration de la convergence de l’optimisation pour le changement d’échelles : la valeur de fonction-objectif et des paramètres en fonction du nombre d’itérations d’optimisation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103 Illustration visuelle de l’optimisation des translations. . . . . . . . . . . . . . . . . . 104 Illustration de la convergence de l’optimisation des translations : la valeur de fonctionobjectif et des paramètres en fonction du nombre d’itérations d’optimisation. . . . . 104 Illustration visuelle de l’optimisation des paramètres combinées avec la rotation. . . 105 Illustration de la convergence de l’optimisation des paramètres combinées avec la rotation : la valeur de fonction-objectif et des paramètres en fonction du nombre d’itérations d’optimisation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105 Illustration des axes principaux d’image et l’orientation initiale du modèle de départ d’organe. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107 Modèle synthétique de l’organe. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108 Illustration visuelle de l’optimisation des paramètres du recalage global sur l’image du vagin. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108 Illustration de la convergence du recalage global sur l’image du vagin. . . . . . . . . 108 Disposition spatiale des points de contrôle pour la fermeture de surface et sa continuité.110. lilliad.univ-lille.fr.
(10) Thèse de Zhifan Jiang, Lille 1, 2017. viii. Table des figures. 4.15 Illustration visuelle de l’optimisation des points de contrôle du recalage local sur l’image du vagin. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.16 Illustration de la convergence du recalage local : la valeur de fonction- objectif et le mouvement maximum des points de contrôle (mm) en fonction du nombre d’itérations d’optimisation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.17 Illustration visuelle du recalage sur l’image médicale initiale du vagin. . . . . . . . . 4.18 Illustration de la convergence du recalage sur l’image médicale initiale du vagin. . . 4.19 Reconstruction des organes pelviens (vessie, vagin et rectum). . . . . . . . . . . . . . 4.20 Comparaison visuelle du modèle reconstruit automatiquement et segmenté manuellement. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.21 Comparaison quantitative du modèle reconstruit automatiquement et segmenté manuellement (mesure d’écart en distances point à point). . . . . . . . . . . . . . . . . 4.22 Diagramme de classes contenant les composants principaux pour les traitements en 2D (Détection des contours et analyse cinématique). . . . . . . . . . . . . . . . . . . 4.23 Application basée sur « WebGL » pour visualiser et exploiter les résultats (modèle géométrique confronté à image). . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 110. 110 112 112 113 114 114 117 118. A.1 La structure d’un fichier DICOM (généralement correspondant à un IOD) . . . . . . 124. © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
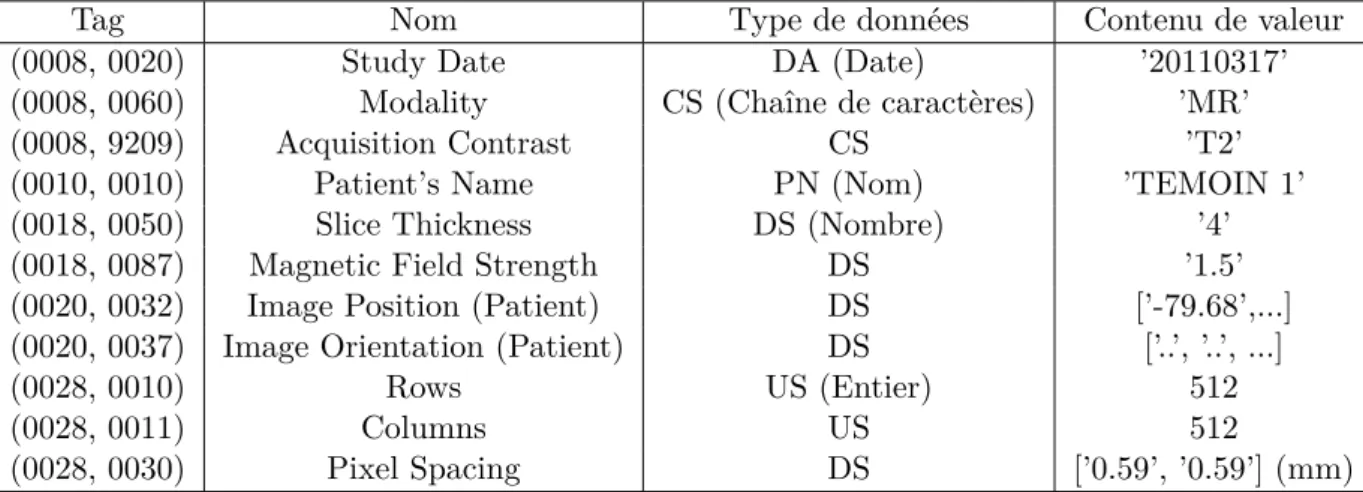
(11) Thèse de Zhifan Jiang, Lille 1, 2017. Liste des tableaux 1.1 1.2. 2.1 2.2. 4.1. 4.2. Temps de relaxation indicatif pour quelques tissus humains (extraits de [Seret et Hoebeke, 2012]). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Tableau récapitulatif de certains éléments extraits d’un fichier DICOM (Digital imaging and communications in medicine) permettant de retrouver les informations présentées dans la section 1.2.2 : la modalité d’acquisition, la patiente, l’orientation d’image, la résolution spatiale etc.) . . . . . . . . . . . . . . . . . . . . . . . . . . . . Tableau récapitulatif de comparaison des deux représentations des géométries. . . . Tableau récapitulatif de mesures d’erreurs entre les segmentations manuelles et automatiques : Les trois sous-tableaux présentent les résultats concernant chaque organe pour différents cas de pathologies. (CD : Coefficient de Dice ; DH : Distance de Haussdorff ; DM : Distance moyenne.) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 16. 19 42. 64. Tableau récapitulatif de mesures d’écart en distances entre la reconstruction manuelle et automatique. La résolution spatiale des images IRM utilisées est de 0, 59 mm pixel−1 ou 0, 73 mm pixel−1 , et l’épaisseur de coupe 3 à 4 mm. . . . . . . . . . . . . 115 Tableau récapitulatif de mesures d’écart en volume entre la reconstruction manuelle et automatique. La résolution spatiale des images IRM utilisées est de 0, 59 mm pixel−1 ou 0, 73 mm pixel−1 , et l’épaisseur de coupe 3 à 4 mm. . . . . . . . . . . . . 115. ix. © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
(12) Thèse de Zhifan Jiang, Lille 1, 2017. © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
(13) Thèse de Zhifan Jiang, Lille 1, 2017. INTRODUCTION GÉNÉRALE. À l’aide des sciences du numérique et de la biomécanique, les études médicales, notamment chirurgicales, ont tendance à devenir de plus en plus objectives, précises et rigoureuses, au-delà de la perception et de l’expérience humaine. Le travail présenté dans cette thèse constitue un bon exemple de cette synergie entre disciplines, dans le contexte des troubles du système pelvien chez les femmes. La modification pathologique des mobilités du système pelvien a un grand impact social touchant particulièrement les femmes âgées. Cependant, il n’est pas trivial d’analyser le comportement de l’ensemble des organes, soutenus par des tissus mous, qui constituent le système pelvien. La physiologie et la pathologie des tissus mous est en effet une question de forces et de déplacement. Notre équipe de recherche, Biomécanique des Tissus Mous (« BioTim ») du Laboratoire de Mécanique de Lille (LML), a pour objectif d’y apporter une contribution, de l’histologie aux traitements patiente-spécifiques. L’objectif de nos recherches est de développer un outil d’aide à la compréhension et au diagnostic pour améliorer le traitement des patientes. Les résultats permettraient de fournir une analyse objective (plutôt que subjective), d’aider à préciser et personnaliser la procédure chirurgicale et de mieux informer les patientes. La tâche principale est la caractérisation et la modélisation du comportement du système pelvien. Cette tâche se compose des travaux suivants : — Caractérisation des propriétés biomécaniques des tissus mous à travers des essais mécaniques ; — Modélisation des géométries des organes et des structures de soutènement en utilisant l’imagerie médicale et des références d’anatomie ; — Simulation numérique du comportement physiologique et physio-pathologique sous charges et contraintes pour obtenir une analyse objective. Dans le cadre du projet financé par le Centre Hospitalier Régional Universitaire (CHRU) de Lille, l’étude de cette thèse a pour objectif de fournir des éléments nécessaires pour ces tâches de manière efficace (c’est-à-dire automatique ou semi-automatique). Elle est fortement liée aux images médicales car c’est une des sources fiables permettant de connaître la morphologie d’une patiente. L’avancée des techniques d’imagerie, spécifiquement celle d’Imagerie par Résonance Magnétique (IRM), nous permet de connaître les informations spatiales (l’anatomie des organes) et temporelles (le mouvement des organes sous effet de poussée). Dans le contexte de l’analyse d’images et de mobilités, le CHRU et l’équipe « BioTim » ont collaboré avec l’équipe « Defrost » du centre INRIA Lille-Nord Europe. Le travail de cette thèse se focalise sur la géométrie et le mouvement des organes. Basé sur ces données d’IRM statiques et dynamiques, le travail de cette thèse vise à lever des verrous scientifiques pour aller d’un cas particulier jusqu’aux cas patiente-spécifiques. 1. © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
(14) Thèse de Zhifan Jiang, Lille 1, 2017. 2. INTRODUCTION GÉNÉRALE. Plusieurs difficultés sont connues pour cette problématique. La reconnaissance des géométries dans des images médicales cliniques doit faire face à de nombreuses exceptions dans les images. Le choix de représentation géométrique doit tenir compte des variations inter-individuelles considérables des formes d’organes pelviens tout en étant compatible avec la simulation numérique. L’idée principale est d’utiliser un recalage de modèles déformables sur les images IRM pour associer un modèle géométrique paramétré aux images IRM. Le développement d’algorithmes semi-automatiques et pertinents, qui traite des données spatiales en 2D et 3D (IRM statique) et des données temporelles en 2D (IRM dynamique), représente ainsi le principal défi à lever pour répondre aux besoins médicaux. Cette thèse est composée de quatre chapitres principaux répartis de la façon suivante et dont les points mentionnés dans cette introduction seront successivement détaillés : Le chapitre 1 présente les éléments préliminaires permettant de mieux comprendre notre sujet. Le contexte médical et le lien avec notre étude scientifique sont d’abord présentés. Des techniques d’imagerie médicale et leurs utilisations sont ensuite introduites. Enfin, une étude bibliographique sur l’analyse d’images médicales est présentée, permettant de nous positionner sur l’état d’avancement des méthodes de segmentation et de recalage et mieux orienter notre sujet. Le chapitre 2 présente la méthode de détection des contours par modèle analytique. Dans un premier temps, le choix de la représentation géométrique est abordé. Ensuite, la notion d’« Image Virtuelle » est introduite. Nous pouvons alors définir le modèle paramétrique utilisé et le processus d’optimisation. Le principe et les détails de notre méthode de recalage sont présentés, accompagnés de recalages effectués sur des données issues de plusieurs patientes, saines et pathologiques. Le chapitre 3 est dédié à l’analyse de la cinématique du système pelvien grâce aux images IRM dynamiques. Le focus est fait sur des indicateurs mécaniques qui permettent l’évaluation des mobilités pelviennes relative aux déplacements des organes et aux cisaillements inter-organes. Ces derniers permettent de donner des indications sur l’état des structures de suspension, difficilement visibles dans les images médicales. Bien que l’application de la méthode de recalage, présentée dans le chapitre 2, permette de suivre les contours des organes en mouvement, nous utilisons un nouveau modèle ajusté doté des points matériels pour assurer la pertinence du calcul. La méthode de suivi et de calcul est analysée et discutée pour différents cas tests. Après toutes ces études portant sur les images 2D statique et dynamique, le chapitre 4 est consacré à la reconstruction des géométries 3D en utilisant des IRM 3D. Nous définissons le modèle géométrique des organes et la procédure semi-automatique. Une nouvelle stratégie est adoptée pour faire face aux difficultés présentes dans cette problématique. Le but est de fournir un modèle fonctionnel pour la simulation sans correction ou retouche manuelles. Pour cet objectif, une preuve de concept est donnée pour démontrer la faisabilité de la méthode. Ensuite, nous présentons l’application de la méthode à la reconstruction d’une part des organes pelviens à partir d’images médicales. Finalement, ce chapitre termine par une description récapitulative des développements informatiques réalisés dans le cadre de cette thèse.. © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
(15) Chapitre. Thèse de Zhifan Jiang, Lille 1, 2017. 1. IMAGES MÉDICALES ET SES APPLICATIONS AUX PATHOLOGIES. Ce chapitre est dédié à la présentation des techniques d’imagerie médicale, des méthodes d’analyse d’images médicales et de leurs utilisations diverses. Dans un premier temps, afin de clarifier notre sujet d’étude, le système pelvien chez la femme est introduit, ses structures anatomiques et ses pathologies. Ensuite, notre apport scientifique au sujet de ce problème médical sera présenté pour mettre en évidence la problématique de cette thèse. Dans un second temps, un panorama des techniques d’imagerie médicale est donné. Ensuite, nous focaliserons notre discours sur la technique qui nous intéresse, c’est-à-dire, celle d’Imagerie par Résonance Magnétique (IRM), dont l’utilisation pour le diagnostic dans le contexte est aussi abordée. Un état de l’art des méthodes d’analyse d’images médicales, de la segmentation et du recalage est donné. Cela permettra de placer nos contributions par rapport aux travaux actuels.. 3. © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
(16) Thèse de Zhifan Jiang, Lille 1, 2017. 4. CHAPITRE 1. IMAGES MÉDICALES ET SES APPLICATIONS. Sommaire 1.1. 1.2. 1.3 1.4. 1.5. © 2017 Tous droits réservés.. Contexte général . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.1.1 Anatomie descriptive du pelvis féminin . . . . . . . . . . 1.1.2 Pathologies du système pelvien . . . . . . . . . . . . . . 1.1.3 Analyse des mobilités du système pelvien . . . . . . . . Images médicales . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2.1 Généralités sur les techniques d’imagerie médicale . . . . 1.2.2 Imagerie par Résonance Magnétique (IRM) . . . . . . . 1.2.3 Utilisations d’images IRM . . . . . . . . . . . . . . . . . IRM et le diagnostic des pathologies pelviennes . . . . . . . . . Utilisations d’analyse d’images médicales . . . . . . . . . . . . . 1.4.1 Méthodes de segmentation . . . . . . . . . . . . . . . . . 1.4.2 Modèles déformables . . . . . . . . . . . . . . . . . . . . 1.4.3 Recalage d’images . . . . . . . . . . . . . . . . . . . . . 1.4.4 Segmentation des organes pelviens vers la reconstruction Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . .. 5 5 6 7 12 12 15 19 20 22 23 26 27 29 31. lilliad.univ-lille.fr.
(17) Thèse de Zhifan Jiang, Lille 1, 2017. 1.1. CONTEXTE GÉNÉRAL. 1.1. 5. Contexte général. Le travail présenté porte sur la modélisation du système pelvien de la femme afin de développer des outils d’aide à la compréhension des physiologies et pathologies et d’aide à la décision. Avant d’aborder cette problématique, nous introduirons son contexte général. Dans cette partie, est présenté le contexte médical : l’anatomie pelvienne, les pathologies dans le cadre de notre étude et leurs diagnostics. Et en dernier lieu, l’apport de nos travaux sur l’analyse des mobilités pelviennes et leurs limitations. Ainsi, ce travail de thèse a pour objectif de surmonter des limitations pour conduire à la compréhension de la physiopathologie.. 1.1.1. Anatomie descriptive du pelvis féminin. Le système pelvien féminin est un système complexe [Kamina, 1984]. À l’aide de l’anatomie descriptive, nous présentons les éléments de base pour connaître le pelvis féminin : les organes principaux, les structures osseuses, ainsi que les tissus mous (Figure 1.1). Ligaments. Coccyx. Rectum. Utérus Vagin Vessie. Plancher pelvien. Pubis. Fascias. Figure 1.1 – Vue latérale gauche de la région pelvienne chez la femme, illustrée par le rendu de modèle CAO (Conception Assistée par Ordinateur) du système pelvien.. Bassin Le bassin est une loge osseuse formant le périmètre de la partie du corps en dessous de la hanche et au dessus des jambes. En vue latérale, deux os définissent les extrémités du bassin : le pubis, qui forme un raccord antérieur et le coccyx, qui se situe en postérieur au bout du rachis. Vessie La vessie est un organe creux, pour la réception et la conservation de l’urine. Elle se situe dans la partie antérieure du pelvis reposant partiellement sur le pubis.. © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
(18) Thèse de Zhifan Jiang, Lille 1, 2017. 6. CHAPITRE 1. IMAGES MÉDICALES ET SES APPLICATIONS. Rectum Le rectum est un organe digestif, formé en tube creux. Il se situe dans la partie postérieure de la cavité pelvienne, entouré partiellement par le coccyx et le sacrum (l’os de la colonne vertébrale au dessus du coccyx). Vagin Le vagin fait partie de l’appareil reproducteur féminin. C’est un organe également creux, localisé entre la vessie et le rectum, et soutenu par le plancher pelvien (l’ensemble des muscles et des tissus dans le petit bassin). Sa partie supérieure est liée à l’utérus via le col de l’utérus. Utérus L’utérus, qui fait aussi partie de l’appareil reproducteur féminin, est localisé dans la partie haute de la cavité pelvienne. Il est aussi creux mais plus épais que les autres organes pelviens. Sa partie inférieure est liée au vagin. Structures de suspension Les ligaments et les fascias sont des tissus conjonctifs. Ils constituent le système de suspension, qui est assez résistants pour relier et supporter les organes pelviens. Ils jouent un rôle très important pour le bon fonctionnement du système pelvien. Le lecteur pourra se référer à [Kamina, 1984; Kamina et Chansigaud, 1988] pour des détails de l’anatomie.. 1.1.2. Pathologies du système pelvien. Les troubles du système pelvien de la femme sont des problèmes fréquents avec une incidence croissante avec l’âge. Ces pathologies sont liées à des mobilités anormales des organes du système pelvien et notamment le prolapsus génital qui est un trouble d’hypermobilité ou l’endométriose pelvienne un trouble d’hypomobilité. Prolapsus Le prolapsus génital est un enjeu social important : 20 à 30% des femmes, tout âge confondu, souffrent d’un degré sévère de prolapsus [Samuelsson et al., 1999] et plus de 60% des femmes de plus de 60 ans sont touchées par cette pathologie [Swift, 2000]. Cela consiste à un affaiblissement du soutien qui cause une descente des organes pelviens. Il existe différents types du prolapsus : la cystocèle (déplacement anormal de la vessie, Figure 1.2(b)), l’hystérocèle (descente de l’utérus, Figure 1.2(c)) et la rectocèle (descente du rectum vers le fond du vagin, Figure 1.2(d)). Endométriose Selon des études, l’endométriose est une pathologie pelvienne atteignant environ 10% des femmes en général [Eskenazi et Warner, 1997]. Cette incidence est beaucoup plus élevée dans la population des femmes infertiles : soit 54% des femmes infertiles avec douleurs pelviennes et 40% d’elles sans douleurs [Meuleman et al., 2009]. Cela consiste en une apparition des matières muqueuses (dites endomètre) en dehors de la cavité utérine. Le développement des muqueuses pourrait conduire à l’hémorragie et à la formation de tissus tumoraux. En conséquence, la patiente souffre d’une douleur sévère. L’endométriose apparaît le plus souvent au niveau des ovaires, toutefois elle peut aussi atteindre la vessie, le rectum et d’autres organes ou tissus moins proches de l’utérus.. © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
(19) Thèse de Zhifan Jiang, Lille 1, 2017. 1.1. CONTEXTE GÉNÉRAL. a. 7. b. Utérus. Vessie. Vessie Urètre Rectum. Urètre Vagin. Anus Vagin c. d. Intestin grêle. Vessie Rectum. Utérus. Vagin. Rectum. Figure 1.2 – Mobilité normale du système pelvien chez la femme (a) et les prolapsus génitaux : la cystocèle (b), l’hystérocèle (c) et la rectocèle (d), source : Cleveland Clinic 1 .. Le contexte médical peut être résumé en deux points : l’observation de la région pelvienne chez la femme, des organes principaux et des structures de suspension ; l’analyse des mobilités et les troubles du système pelvien liés à des mobilités anormales des organes, l’hypermobilité et l’hypomobilité. Dès lors le mécanisme à l’origine de maladies et leurs diagnostics nous intéressent. Nous focaliserons notre étude sur le prolapsus génital concernant des organes en grandes transformations. Le travail présenté dans la section 1.1.3 permettra de mettre en valeur nos apports scientifiques à cette problématique.. 1.1.3. Analyse des mobilités du système pelvien. La présence du trouble de la statique pelvienne comme le prolapsus est élevée dans les pays développés et chez les femmes âgées. Le traitement de la maladie nécessite souvent une 1. http://my.clevelandclinic.org/services/ob-gyn-womens-health/diseases-conditions/ pelvic-organ-prolapse. © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
(20) Thèse de Zhifan Jiang, Lille 1, 2017. 8. CHAPITRE 1. IMAGES MÉDICALES ET SES APPLICATIONS. intervention chirurgicale (souvent l’implantation de bandelettes pour fixer les mouvements à endroits spécifiques) et son taux de récidive est aussi élevé. La physiopathologie permettra aux chirurgiens de mieux comprendre le mécanisme du prolapsus pour améliorer les techniques chirurgicales. Toutefois, elle est aujourd’hui mal connue malgré les deux théories anatomiques existantes sur une de ces pathologies (cystocèle) [Petros et Ulmsten, 1990; DeLancey, 1992]. Dans le cadre des projets financés par le Centre Hospitalier Régional Universitaire (CHRU) de Lille 2 , le Laboratoire de Mécanique de Lille (LML) 3 et le groupe pharmaceutique Johnson & Johnson 4 travaillent depuis plusieurs années sur la caractérisation et la modélisation des mobilités du système pelvien. Nous avons pour objectif de développer un outil d’aide à la compréhension du mécanisme des pathologies, bâti sur des principes de mécanique, réalisé par des méthodes numériques. L’idée est de réaliser des simulations du système pelvien dans le cas de la physiologie normale, puis de créer virtuellement un prolapsus via la simulation en dégradant le modèle de simulation pour identifier les clés de la physiopathologie. D’un autre côté, les images médicales sont indispensables pour nos études, il s’agit des Images par Résonance Magnétique (IRM) largement utilisées en clinique pour les diagnostics. Soulignons que les images ne sont pas produites spécifiquement pour la recherche, donc nous disposons des mêmes images et techniques d’imageries que les chirurgiens en routine clinique. Nos traitements doivent donc être adaptés à la modalité d’imagerie clinique. Les images médicales, présentées en détail dans les sections 1.2 et 1.3, sont utilisées pour deux raisons : l’utilisation de l’IRM statique pour la reconstruction des géométries des patientes spécifiques et de l’IRM dynamique pour analyser les résultats issus de la simulation, qui est un critère important, voire le seul aujourd’hui, pour valider la simulation. Dans ce contexte de l’analyse d’images et de mobilités, le CHRU et le LML ont collaboré avec le centre d’INRIA Lille-Nord Europe 5 . Dans cette section, nous allons présenter nos travaux de caractérisation des matériaux, modélisation (géométrique et physique) et simulation des tissus mous en grandes transformations. Enfin, nous focaliserons sur l’aspect informatique de l’analyse d’images médicales pour faciliter nos études et pour surmonter les limitations. Simulation en cas de physiologie normale La simulation des tissus mous, basée sur la méthode des éléments finis (Finite Elements Method, FEM ), est un problème complexe nécessitant la connaissance de données pluridisciplinaires. Pour réaliser une simulation « correcte », il faut déterminer trois types d’informations importantes : — Des caractérisations mécaniques comprenant la loi des comportements et les propriétés biomécaniques à travers des essais ; — Des modèles géométriques représentant les organes et les structures pelviennes, maillées ou paramétrées, qui composent le domaine de calcul éléments finis. — Des conditions de chargements définissant les déplacements imposés et l’identification de l’impact des structures de suspension sur la simulation. 2. 3. 4. 5.. © 2017 Tous droits réservés.. http://www.chru-lille.fr/ http://mecanique.univ-lille1.fr/Recherche/LML/ https://www.jnj.com/ https://team.inria.fr/defrost/. lilliad.univ-lille.fr.
(21) Thèse de Zhifan Jiang, Lille 1, 2017. 1.1. CONTEXTE GÉNÉRAL. 9. Caractérisation des propriétés bio-mécaniques des tissus mous Depuis près de 10 ans, l’équipe « BioTim » a développé et validé un protocole expérimental pour les mesures des propriétés mécaniques des tissus mous [Rubod et al., 2007, 2008; Rao et al., 2010; Rubod et al., 2012]. Les essais ont été réalisés sur des cadavres avec un contrôle de la température, de la géométrie des échantillons. Nous avons validé un comportement hyperélastique, une loi de comportement et des propriétés mécaniques. Une étude a été faite pour analyser l’effet de l’âge sur ces propriétés des tissus [Chantereau et al., 2014]. Reconstruction des géométries Comme dans la plupart des applications, des géométries sont actuellement construites à partir des images IRM fournies par des médecins. Ces images IRM statiques sont composées de coupes bidimensionnelles dans les trois directions (détails dans les section 1.2.3 et 1.3). La première étape de segmentation est d’extraire des contours des organes pelviens (la vessie, le vagin, le rectum et l’utérus) dans des images. Nous avons effectué manuellement la segmentation en utilisant le logiciel Avizo 6 . Ensuite, ces géométries ont été lissées manuellement dans le logiciel de CAO (Conception Assistée par Ordinateur) CATIA 7 pour qu’elles soient utilisables dans le code de calcul FEM ABAQUS 8 . Ce processus de reconstruction (Figure 1.3) est aujourd’hui fastidieux et répétitif : Un opérateur expérimenté a besoin de quelques dizaines d’heures de travail pour construire des surfaces propres à partir des images. Une étude récente [Mayeur et al., 2014, 2015] a montré que les géométries ont a. b. c 1 2 3. 20mm 8mm. 4. 2mm 20mm. 20mm. Figure 1.3 – Génération des géométries à partir de l’image IRM. (a) Image de la coupe sagittale médiane avec la résolution spatiale. (b) Contours des organes obtenus par Avizo. (c) Modèle géométrique lisse construit - 1. Utérus, 2. Vagin, 3. Vessie, 4. Rectum. Source : [Mayeur et al., 2015].. un impact sur les résultats de simulation, par exemple l’épaisseur définie. L’impact de cette dernière peut être plus significatif que les facteurs mécaniques, présentés dans le paragraphe précédent. Actuellement, nous avons effectué une simulation générique en cas de physiologie normale. Cette étude a montré la possibilité de la simulation spécifique des patientes, mais avec comme limite l’inconvénient de la reconstruction manuelle. Un des objectifs de cette thèse porte sur la reconstruction efficace, semi-automatique et conforme à la simulation, par l’intermédiaire 6. http://www.fei.com/software/avizo3d/ 7. http://www.3ds.com/fr/produits-et-services/catia/ 8. http://www.3ds.com/products-services/simulia/products/abaqus/. © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
(22) Thèse de Zhifan Jiang, Lille 1, 2017. 10. CHAPITRE 1. IMAGES MÉDICALES ET SES APPLICATIONS. des images et des modèles géométriques bien définis (fonctionnels, réutilisables directement pour le simulateur). Modélisation des soutènements Jusqu’à maintenant, nous avons mentionné les principaux organes du système pelvien, toutefois, le système pelvien est complexe avec des structures de suspension comme des ligaments et des fascias inter-organes, ce qui n’est pas facile à modéliser. Ces derniers s’avèrent très importantes pour la simulation. Des études ont montré l’impact des structures de soutènements sur les mobilités [Vallet et al., 2011; Mayeur et al., 2014]. Cependant, ces structures ne sont pas observables sur des images IRM à cause du faible contraste et de la petite taille. Néanmoins, des simulations avec et sans ces structures ont été mises en place. Actuellement ces structures de suspension ont été placées selon les descriptions en anatomie de la littérature [Kamina, 2014]. Nous améliorons au fur et à mesure ce modèle fonctionnel avec les ligaments et fascias. a. b. c Direction de poussée. z. 0 y x. 3 6. 0. 9. Déplacements (mm). z. 1 2. Cervix. 3. Déformation principale y maximum (%). 0 0.01 0.02. z y. Contrainte principale maximum (MPa). Figure 1.4 – Résultats de simulation d’une patiente saine sous effort de poussée : (a) Champ de déplacements (la magnitude) superposés sur le modèle géométrique, la condition aux limites est représentée par la ligne pointillée rouge ; (b) la déformation principale maximum en coupe sagittale médiane 2D ; (c) la contrainte principale maximum. Source : [Mayeur et al., 2015].. La figure 1.4 montre un résultat de la simulation d’une patiente saine sous effort de poussée, la magnitude des déplacements en 3D et les déformations en coupe sagittale médiane 2D. En utilisant des images médicales comme des références, nous allons présenter un moyen implicite dans la section suivante pour déduire leur impact sur des mobilités par l’analyse des déplacements et des cisaillements dans des IRMs dynamiques. Analyse des déplacements via l’IRM dynamique Nous avons mis en place des techniques de simulation pour un cas de physiologie, sa chaîne de traitements [Lecomte-Grosbras et al., 2013]. Maintenant, nous nous focalisons sur la validation de la simulation. Comme nous l’avons mentionné, le « terrain de vérité » pour vérifier notre simulation est l’IRM dynamique, précisément les déplacements extraits de ces images mobiles. Une étude récente de [Lecomte-Grosbras et al., 2015] a proposé des résultats prometteurs par recalage d’images. La figure 1.5 montre la distribution des déplacements au voisinage des contours. © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
(23) Thèse de Zhifan Jiang, Lille 1, 2017. 1.1. CONTEXTE GÉNÉRAL zone des mobilités faibles. 11 déplacements. U(mm). zone des mobilités fortes. fascias invisibles dans l'image -> devront être modélisés de façon indirecte par l'évaluation des cisaillements inter-organes. résultat du recalage d'images. Figure 1.5 – Résultats du recalage d’images IRM dynamiques. Le résultat du champs de déplacements extrait de [Lecomte-Grosbras et al., 2015], les contours blanc sont les initiaux.. des organes, correspondant aux parois des organes. Ces déplacements seront ensuite comparés avec les résultats issus de la simulation, comme le montre la figure 1.4. Cependant, pour obtenir cette information de déplacements, il est nécessaire d’effectuer le recalage sur le domaine complet de l’image. Ensuite, les déplacements s’exerçant sur les contours sont extraits manuellement par des masques correspondantes aux contours. Cependant, l’information concernant le mouvement relatif inter-organes ne peut pas être obtenue par le recalage. Par conséquent, nous visons à développer une méthode permettant de suivre de manière automatique les contours, qui aidera à extraire le champ de déplacements, ainsi que les cisaillements inter-organes. Ces derniers représenteront l’influence des fascias invisibles dans l’image, qui pourront améliorer la modélisation pour la simulation. Une fois qu’aura été mise en place la simulation dans le cas de physiologie normale (patiente saine sous effort de poussée), la simulation sera abordée pour le cas de pathologies (celle de prolapsus). Certains éléments du modèle fonctionnel seront dégradés pour l’étude de leurs impacts. Pour l’instant ce travail est basé sur un modèle générique et fonctionnel, toutefois, nous espérons généraliser l’étude du prolapsus en l’étendant vers des modèles spécifiques des patientes sur un jeu de données important. Néanmoins, revenons maintenant sur les aspects fortement liés aux travaux de cette thèse et ses contributions pour les études ultérieures : — la reconstruction spécifique des patientes, efficace, semi-automatique et conforme au modèle de la simulation pour tendre vers la simulation spécifique des patientes ; — le suivi automatique des images IRM dynamiques pour déduire les mouvements des organes, et inter-organes pour valider et améliorer notre modèle de simulation. Pour tous ces objectifs, les images médicales sont des éléments indispensables. Avant d’entamer notre approche en détails, nous présenterons un état de l’art lié à notre sujet, commençant dans un premier temps par des généralités sur les techniques d’imagerie mé-. © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
(24) Thèse de Zhifan Jiang, Lille 1, 2017. 12. CHAPITRE 1. IMAGES MÉDICALES ET SES APPLICATIONS. dicale. Enfin, nous nous focaliserons sur l’utilisation de l’IRM pour le diagnostic des pathologies pelviennes. Dans un deuxième temps, nous présenterons diverses méthodes de segmentations (étape classique pour la reconstruction). Ensuite, nous aborderons la technique de recalage d’images, utilisée pour étudier les mouvements dans une séquence temporelle d’images, comme celle d’IRM dynamique. Finalement, nous discuterons de la stratégie de reconstruction spécifique à notre problématique.. 1.2. Images médicales. Les images médicales sont des données obtenues à partir de nombreux moyens d’acquisition d’images basés sur différents principes physiques. Depuis leurs naissances (la théorie date de l’aube du XXe siècle), les techniques d’imagerie médicale sont utilisées en routine clinique et continuent à se développer pour permettre l’examen de l’intérieur du corps humain. Les utilisations se multiplient, et les types d’imagerie médicale se diversifient. Actuellement, les études basées sur ces techniques sont spécialisées et en liaison avec la nature des tissus et/ou le type de pathologie.. 1.2.1. Généralités sur les techniques d’imagerie médicale. Les techniques d’imagerie ne sont pas toutes basées sur le même principe physique. Leur performance dépend donc de la propriété physique des tissus, mais aussi de la volonté de réaliser une analyse anatomique ou fonctionnelle. De façon générale, quatre types d’imageries, dédiés à de différentes utilisations, sont présentées dans cette section, bien qu’elles ne soient pas toutes utilisées pour le diagnostic des pathologies qui nous concernent. La tomodensitométrie La tomodensitométrie, dite aussi « scanner », est une technique de tomographie à rayons X (X-ray computed tomography, CT ) qui permet d’identifier les parties internes du corps humain par mesure de leur absorption des rayons X. Cette atténuation des rayons X mesurée est ensuite numérisée pour reconstruire l’image correspondante à la section scannée. L’objet à identifier est placé entre la source des rayons et le détecteur. Ce dernier reçoit des rayons X dont l’intensité a été atténuée par le passage à travers l’objet dans sa direction sur le plan axial. L’atténuation globale du faisceau observée provient de l’ensemble des tissus disposés selon cette direction. Cependant, pour remonter à l’atténuation locale correspondante à une position précise sur cette direction, il est nécessaire de récolter l’ensemble des faisceaux sous d’autres orientations en utilisant le principe de la rétroprojection filtrée [Cormack, 1963; Shung et al., 1992; Seeram, 2009]. C’est pour cette raison que ces dispositifs tournent autour de l’objet pour récolter l’ensemble des projections (Figure 1.6). Le niveau gris d’image représente le coefficient d’atténuation µtissu de l’objet scanné, calculé selon l’échelle de Hounsfield (pionnier du scanner médical, récompensé du prix Nobel de physiologie ou médecine en 1979), définit le nombre CT (unité : HU). le nombre CT =. © 2017 Tous droits réservés.. µtissu − µeau × 1000 µeau. (1.1). lilliad.univ-lille.fr.
(25) Thèse de Zhifan Jiang, Lille 1, 2017. 1.2. IMAGES MÉDICALES. 13. Source Rotation. Objet Rayons X. Z Objet. Y X. Y Détecteur. X. Figure 1.6 – Illustration du scanner à rayons X : un objet bleu tridimensionnel est placé dans un scanner, comprenant des détecteurs disposés en anneau et une source tournant le long de l’anneau. L’acquisition s’effectue dans les sections axiales.. Puisque des matières atténuent différemment les rayons X, elles se représentent différemment dans l’image. Par exemple, le niveau 0 correspond à l’eau, de −120 à −60 pour la graisse, −1000 pour l’air et +1000 pour l’os. Ces deux dernières valeurs marquent aussi les limites d’échelle. Le temps d’acquisition et la résolution spatiale du scanner varient selon son type d’utilisation. Généralement il est plus rapide par rapport aux autres techniques et la taille de pixel peut aller de 0, 05 mm à 1, 80 mm [Shung et al., 1992].. L’imagerie scintigraphique Outre la tomodensitométrie, il existe une autre catégorie de techniques, dite imagerie médicale nucléaire. Basé sur le principe de scintigraphie, un matériel radioactif « traceur » est injecté par voie intraveineuse au patient. Ce traceur se condense sur les tissus et les organes cibles, qui sont par exemple, le cœur, le cerveau et les cellules tumorales. Ensuite, le détecteur scintigraphique (une caméra Gamma) permet de mesurer la radiation interne émise par le produit injecté. Cette technique est fréquemment utilisée pour indiquer les activités moléculaire et métaboliques des tissus, par exemple, pour détecter l’évolution de cancer. Nous citons ici la Tomoscintigraphie par Emission de Positrons (TEP) (en anglais : Positron Emission Tomography, PET ) [Sweet, 1951; Brownell et Sweet, 1953]. Contrairement au scanner à rayons X, ce type d’imagerie n’utilise pas une source pour lancer des rayons externes à travers du corps, qui est « non-invasive » dans ce sens. Cependant, aujourd’hui la TEP est souvent couplée avec le scanner CT afin d’obtenir l’image fonctionnelle (voir la figure 1.7 pour l’exemple) et structurelle en même temps, cd qui rend le diagnostic plus précis. Dans cette catégorie, la Tomographie d’Émission MonoPhotonique (TEMP), dite aussi en anglais Single Photon Emission Computed Tomography, SPECT, est une variation de TEP de même principe.. © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
(26) Thèse de Zhifan Jiang, Lille 1, 2017. 14. CHAPITRE 1. IMAGES MÉDICALES ET SES APPLICATIONS. Figure 1.7 – Image TEP - Une coupe transverse du cerveau d’un patient âgé de 56 ans. La zone rouge montre les tissus où le traceur est plus accumulé que dans la zone bleue (source : domaine public 9 ).. La tomographie d’impédance électrique La tomographie d’impédance électrique est une nouvelle technique d’imagerie par mesure de l’impédance du sujet stimulé par un courant électrique, dont la théorie remonte à 1978 [Henderson et Webster, 1978] et l’application date du début des années 1980 [Barber et Brown, 1984]. Cette technique nécessite généralement de poser des électrodes sur la partie dédiée des patients. L’imprécision de mesure d’électrode conduit à une faible résolution spatiale. Malgré les inconvénients de cette technique moins développée que les autres, celle-ci est prometteuse car elle peut être utilisée au lit de patient pour le soin continu et non dans le tunnel d’un imageur et est de plus complètement non-invasive. Le système est relativement simple à utiliser et l’acquisition d’images est rapide par rapport aux autres techniques. L’échographie L’échographie est une technique d’imagerie basée sur des ultrasons, dont l’utilisation, d’abord pour la détection des sous marins, inventée par P. Langevin et al., a commencé au début du XXe siècle. Son application au diagnostic médical n’est apparue qu’en 1947 quand K. Dussik et al. ont publié les premières images médicales [Yoxen, 1987]. Aujourd’hui, cette technique est très utilisée pour les tissus mous, en particulier pour visualiser le fœtus, lors des consultations prénatales pour le suivi de grossesse. Une sonde se charge de l’émission et de la réception d’ultrasons, réfléchis différemment par les tissus. Cette technique est non invasive chez les humains (utilisation sure pour les femmes enceintes) et rapide, ce qui permet donc un diagnostic en temps réel. Cependant, elle a quelques inconvénients : très limitée pour les os, très perturbée par la présence de l’air entre des tissus et la faible profondeur de détection. 9. http://upload.wikimedia.org/wikipedia/commons/c/c6/PET-image.jpg, //jens-maus.de), via Wikimedia Commons. © 2017 Tous droits réservés.. Jens. Maus. (http:. lilliad.univ-lille.fr.
(27) Thèse de Zhifan Jiang, Lille 1, 2017. 1.2. IMAGES MÉDICALES. 15. Nous avons présenté des techniques d’imagerie médicale usuelles : le principe physique, l’utilisation et les avantages et désavantages, toutefois il existe encore une technique récente dont l’utilisation est répandue, celle d’Imagerie par Résonance Magnétique (IRM). Vu son lien fort avec notre sujet d’études, nous allons consacrer une autre section entière à la détailler.. 1.2.2. Imagerie par Résonance Magnétique (IRM). Depuis la découverte du phénomène de résonance magnétique nucléaire (RMN) par F. Bloch [Bloch, 1946] et E. Purcell [Purcell et al., 1946] en 1946 (récompensés par le prix Nobel de physique de 1952), l’application de l’IRM en médecine continue de se développer. Cette dernière devient aujourd’hui une des techniques les plus avancées en imagerie. Notons que R. Ernst a introduit l’application de la spectroscopie à la RMN [Aue et al., 1976], récompensé du prix Nobel de chimie de 1991. Grâce à son principe, les premières machines IRM commercialisées sont apparues au début des années 1980. Pour générer des images, cette technique se base sur les propriétés quantiques des noyaux atomiques de tissus sous un champ magnétique. Vu son haut contraste intrinsèque pour les tissus mous et sa qualité non-invasive, cette technique d’imagerie nous intéresse plus que les autres. Le principe physique de l’imagerie par résonance magnétique (IRM) Le principe de l’IRM est basé sur le phénomène de résonance magnétique nucléaire (RMN). L’explication de son principe porte donc sur ces trois mots clés : « résonance » référant au phénomène de résonance et de relaxation, « magnétique » référant au champ magnétique et « nucléaire » référant aux propriétés quantiques des noyaux atomiques. Contrairement à l’imagerie scintigraphique, le mot « nucléaire » ne désigne pas les matières radioactives. Tout comme la masse, le spin est une propriété intrinsèque d’un élément, lié au noyau atomique. Pour faciliter la compréhension, le spin pourrait se comparer à la rotation en physique classique, mais il est purement quantique. Il crée un champ magnétique minuscule, décrit par un moment magnétique µ ~ . Grâce à cette propriété magnétique, lorsque les atomes sont placés dans un champ magnétique extérieur B0 , ils sont en mouvement de précession. Analogue à la rotation et la révolution de la Terre, pour l’atome il existe le spin et la rotation autour du champs magnétique extérieur. La fréquence de ce mouvement f=. γB0 2π. (1.2). est la fréquence de résonance, dite fréquence de Larmor. Par ailleurs, sous ce champ extérieur, l’ensemble des atomes présente un effet magnétique global, décrit par un vecteur d’aimantation ~ qui était initialement nulle. C’est basé sur ces deux quantités (la fréquence f et l’aimantation M ~ ) que le phénomène RMN peut être observé et mesuré (Figure 1.8). M Si maintenant une impulsion radiofréquence de même fréquence que celle de Larmor (souvent celle de l’atome d’hydrogène), perpendiculaire au champ magnétique (B0 ), est appliquée sur ~ va être éloignée de sa position au repos. l’objet, les atomes vont résonner et l’aimantation M Lorsque l’impulsion s’arrête, l’aimantation reviendra à l’équilibre. Durant ce processus, dit de relaxation, des ondes électro-magnétiques seront émises et mesurées par le détecteur. La durée de ce processus, dit temps de relaxation (deux types T1 et T2 ), joue un rôle important car les deux temps varient en fonction de différentes matières, de leurs teneurs en graisses et eau (voir. © 2017 Tous droits réservés.. lilliad.univ-lille.fr.
Figure



+7



Documents relatifs