A Myrinet firmware development experience
Texte intégral
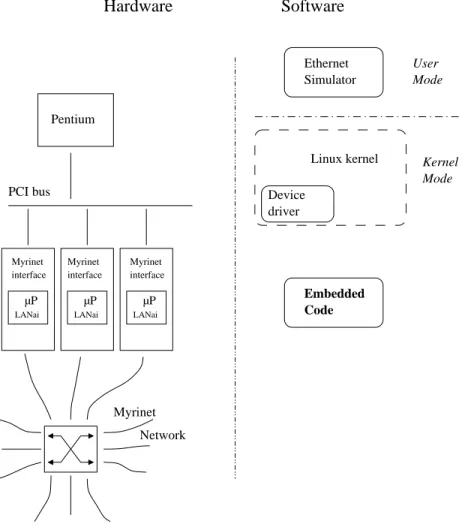
Figure
Documents relatifs
Public Functions Provided Kernel Hackers ManualApril
A Block Protect Check sequence takes place on the first write after reset, on a write to an address in a new block of memory, if the memory interface did an update of
Therefore by the time the adapter card drives ACK back to NuBus during state S4, the least significant 16 bits of data, corresponding to the first RAM location read, which were
Pour traiter les questions de cette section, on suppose que le poste client dispose d'une interface Ethernet déjà configurée avec un accès à un réseau local puis
Quelle est la liste des paramètres de la commande isdnctrl à utiliser pour configurer l'interface RNIS.. Utiliser les pages de manuels de la
This paper postulates a thesis claiming that abstraction is an essential part of communication during user interface development, that models are a way of
The presentation model deals with the specification of visual forms of UI objects and their layout as a whole. An UI is normally presented within a rectangle area of
If a valid address is entered, the terminal stores the information in its working memory and returns to the Setup Menu with the Edit Host IP addr field updated.. Save Settings
