Computer Aided Formal Design of Swarm Robotics Algorithms
Texte intégral
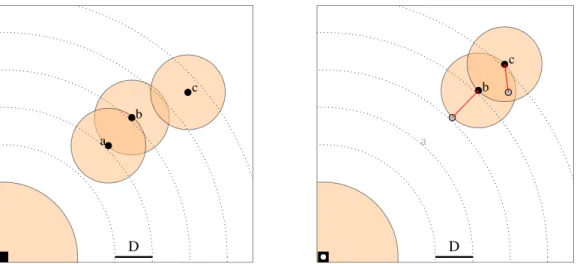
Figure
Documents relatifs
Osteoporosis is a global health problem and is predicted to become the commonest metabolic bone disease in the Eastern Mediterranean Region.. It is becoming progressively more
At the risk of provoking the charge of medical paternalism, I am con- vinced as a practitioner that one of the most fundamental missions of the medical and health fraternity
Aware of the grave consequences of Substance abuse, the United Nations system including the World Health Organization have been deeply involved in many aspects of prevention,
Sex workers (female , male or transvestite), journalists, police, small shopkeepers, street vendors and so on are very important. to prevent sexually transmitted diseases
In recent focused discussions with members of support organizations in Melbourne, Australia, family carers of people with dementia emphasized that a great deal of stress
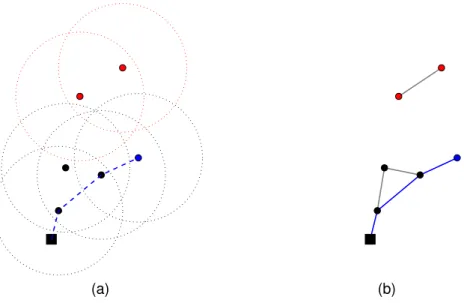
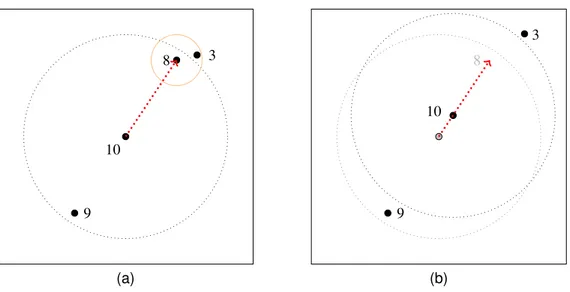
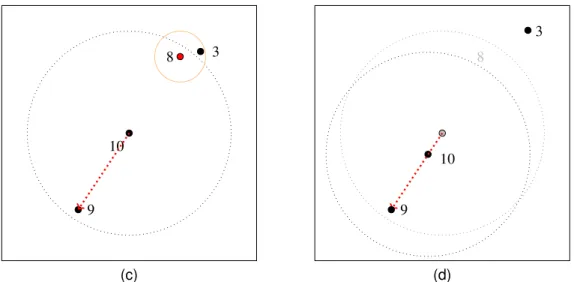
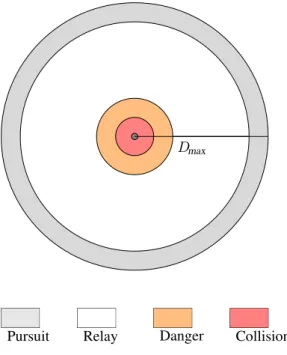
The problem statement is formulated as follows: it is necessary to develop an infor- mation system of forecasting for conducting scientific researches ”SIIM” (Swarm
Therefore the main objective of this article is to present the conceptual structure of the CAFD system and to develop the information support for the entire fixture design
Now we have following result which gives a way to get back quasi coherent complexes over superscheme with a pair of quasi coherent complexes over the purely even superscheme (or
