An Approach to Planning and Control of Stochastic Network Flows
by
Michael J. Paskowitz
Submitted to the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for the Degrees of
Bachelor of Science in Computer Science and Engineering
and Master of Engineering in Electrical Engineering and Computer Science at the Massachusetts Institute of Technology
,May 22, 2000
D 2000 Michael J Paskowitz. Altrights reserved.
The author hereby grants to M.I.T. permission to reproduce and distribute publicly paper and electronic copies of this thesis
and to grant others the right to do so.
Author
Department of Electrical Engineering and Computer Science May 22, 2000 Approved by Certified by
(
Accepted by. Chairman SteVhan E. 1i The Charles Stark Draper Laboratory, Inc.Technical Supervisor
C'ynthia Barnhart Codirector, MIT Operations Research Center ThqKue risor
Arthur C. Smith
, Department Committee on Graduate Theses
MASSACHUSETS NTJuiN ! OF TECHNOLOGY
An Approach to Planning and Control of Stochastic Network Flows
by
Michael J. Paskowitz
Submitted to the
Department of Electrical Engineering and Computer Science
May 22, 2000
In Partial Fulfillment of the Requirements for the Degrees of Bachelor of Science in Computer Science and Engineering
and Master of Engineering in Electrical Engineering and Computer Science
ABSTRACT
Large scale real-time planning and execution of complex flow-based networks requires careful modeling and analysis. These real-time systems often need to be modeled for an indefinite amount of time, and are often faced with unpredictable, stochastic changes to the system over time. Real-time planning must be done progressively, adapting to change as or after it occurs. Implemented plans must strive to be as efficient as possible while conforming to network demand and resource constraints. This thesis presents an approach to the planning and execution of stochastic real-time network flow problems. The approach taken is to apply linear programming, a deterministic network solution technique, to a stochastic real-time network flow problem with an unbounded time horizon by solving finite sections of the entire problem, one by one, over time. The approach is analyzed using a case study problem in the domain of military logistics planning. The analyses offer insight into more general application of this approach to other real-time network flow problems.
Technical Supervisor: Stephan E. Kolitz The Charles Stark Draper Laboratory, Inc.
Acknowledgements
There are many individuals to whom I owe my deepest thanks and gratitude for their contributions to my thesis research.
First and foremost, I would like to thank Dr. Stephan Kolitz of Draper Laboratory and Professor Cynthia Barnhart of MIT for their constant guidance and support. Even with the many obligations of their own work, they both found the time and effort over the past year to help drive my research to completion. I could not have come this far without their collective experience, technical vision, and sage advice.
I am grateful to the Charles Stark Draper Laboratory for its commitment to education,
and for funding my MIT tuition.
Thanks also go to Bill, my Draper buddy, for his countless contributions to my work experience.
My parents, Irv and Jean, deserve my highest praise for their faith and support over the
past year, and the 22 that preceded it.
Finally, now and forever, I would like to express my grateful appreciation and love to my fianc6e Maria. Her motivation and encouragement have kept me working hard on this project, and have shown me that there really is a light at the end of the tunnel.
This thesis was prepared at The Charles Stark Draper Laboratory, Inc, Company Sponsored Research: Real-Time Large-Scale Optimization,
2036.
Publication of this thesis does not constitute approval by Draper or the Institute of Technology of the findings or conclusions contained herein. solely for the exchange and stimulation of ideas.
under Internal IR&D Project Massachusetts It is published Michael J. Paskowitz 22 May 2000
Table of Contents
1. INTR O D U CTIO N ... 7
2. INTEN T A ND O BJECTIV ES... 16
2.1 THE PARTIAL PLANNING APPROACH... 16
2.2 PARTIAL PLAN LENGTH EFFECTS... 17
2.3 NETWORK PARAMETER FORECASTING AND ASSESSMENT... 18
2.4 PLAN CONTINUITY ... 19
3. IM PLEM EN TA TIO N DETAILS... 22
3.1 D EFINITIONS... 22
3.2 FORM ULATING THE M ODEL ... 24
3.3 FINDING A SOLUTION... 25
3.4 SOLVING A PARTIAL PLANNING SERIES ... 26
3.5 FLOW PIPELINING ... 28
4. TH E CA SE STUD Y M O DEL ... 30
4.1 TRANSPORTATION ... 31
4.2 CONTAINERS, DEPOTS AND PORTS... 31
4.3 N ET EXPLOSIVE W EIGHT ... 32
4.4 LATE D ELIVERY ... 33
4.5 D ECISION V ARIABLES ... 33
4.6 O BJECTIVE FUNCTION... 35
4.7 M ATHEM ATICAL FORM ULATION... 36
5. A NA LYSES A N D RESULTS... 39
5.1 PARTIAL PLAN LENGTH ... 39
5.1.1 Partial Plan Length Scenario D escription ... 40
5.1.2 D eterm inistic D emand Results... 42
5.1.3 Stochastic D emand Results... 43
5.2 FORECASTING DEM AND... 44
5.2.1 Forecasting and Assessment Scenario D escription ... 45
5.2.2 Forecasting Results ... 46
5.3.1 Transportation D elay Scenario D escription... 48
5.3.2 Transportation D elay Results ... 50
5.4 ON-DEM AND REPLANNING AND INTEGRATION ... 51
5.4.1 On-demand Replanning Scenario Description ... 52
5.4.2 Transportation Link Loss Event Results... 53
5.4.3 D epot and Port Loss Event Results... 54
5.5 EXECUTION SIM ULATION... 56
5.5.1 Execution Sim ulation Scenario D escription ... 57
5.5.2 Sim ulated Execution Results... 58
6. SU M M A R Y A ND CO N CLUSIO NS ... 60
6.1 RESEARCH SUM M ARY... 60
6.2 CONCLUSIONS ... 62
7. FU TU R E W O R K ... 67
7.1 PARTIAL PLAN INTEGRATION TECHNIQUES... 67
7.2 PLAN CORRECTION M ETHODS ... 68
7.3 APPLICATION TO OTHER PROBLEM S ... 69
APPEND IX ... 71
SAM PLE AM PL M ODEL FILE ... 71
SAM PLE AM PL D ATA FILE ... 73
1. Introduction
A flow-based network is a weighted, directed graph with two sets of specially
designated nodes, the sources and the sinks, and a capacity function that maps edges to
positive real numbers. The edges of the graph are generally directed from source to sink,
and the weights represent the maximum amount of flow that can travel along each edge
[2]. Flow refers to one or more commodities, either as discrete elements or continuous
streams, that are present at the sources and travel to the sinks through the various edges
of the network. Water flows from reservoirs to kitchen sinks by way of pipes and water
pressure tanks. Airlines transport millions of passengers a year between numerous cities
around the world using a limited number of planes. Distributors supply goods from
warehouses to customers through various distribution channels. Inherent in each of these
and many other flow-based networks is a problem that has to be solved: on which edges
should the commodities travel so that each sink receives its required amount of the
commodity in the most timely and efficient manner possible? Such problems are known
generally as minimum-cost network flow problems [ 1].
Parameters are values assigned to nodes and edges of a graph. For network flow
problems parameters include the amount of supply at each source, the flow capacity of
each edge, and the demand at each destination or sink. Many networks also have
constraints specific to their particular problems. A constraint is a logical relation between
flow problem impose restrictions on flow beyond those stated by edge capacities. Values
associated with constraints on a network flow are also considered parameters of that
network. In the case of the airlines, each plane must have a flight crew and some number
of flight attendants, and must be fueled, cleaned, and loaded to some capacity before it
can take off. The overall schedule of flights is also subject to weather conditions, other
traffic at the airports, and maintenance requirements.
Certain types of network flow problems need only be solved rarely. Infrastructure
networks like water and electric utilities are determined when the network is built and
essentially fixed for a long period of time. A flow-based network with fixed edges and
edge weights (i.e., that do not change over time) is considered a static network [1]. In
designing a water supply network the problem is to determine the best way to supply
sufficient water to each destination while minimizing the total number of pipes used and
minimizing the costs of installation and maintenance. It might be twice as cheap to lay
pipes aboveground rather than bury them in the ground, but they might then require four
times as much maintenance. Once decisions like this have been made and the network is
in place, flow proceeds as intended and the problem is considered solved. When a link
fails, it is typically rebuilt to match its preexisting condition and maintain the same
network structure.
This approach works for some systems, but not all network flow problems are
static. A network flow problem that airlines must solve involves the routing of passengers
flight schedule for the airline's fleet. In practice, such schedules face ever-changing
network conditions that must be taken into account. Planes can have mechanical
difficulties or fail to depart on time. Pilots and flight attendants may call in sick and need
to be replaced. An airport may close in the middle of a snowstorm. Because the
conditions of an airline network change over time, any one solution to its scheduling
network flow problem is only viable for a short period of time. Thus the problem must
be re-solved regularly, and the flow of passengers redirected (to a different plane, or a
later time) to maintain a feasible solution. Flow-based networks with parameters that
change over time are called time-expanded or dynamic networks [1].
Another example of a dynamic network flow problem is supply-chain logistics
planning. This problem is found in various forms in many commercial and military
situations. The network sources are supply warehouses of one or more goods. The sinks
are any destinations, perhaps retail stores, construction sites, or fielded forces, which
need a recurring supply of the goods stored at the warehouses. The network flow
problem involves how to most efficiently transport goods from warehouses to
destinations with demand [1]. The military commonly deals with this type of problem.
In times of war, the military must supply its fighting forces with food, medical supplies,
and munitions. This problem is dynamic since both supply network conditions and
demand requirements can change over time.
Small network flow problems can be solved either by inspection or some limited
discussed, could have an extremely large number of possible solutions and hundreds of
thousands of decisions that need to be made. These decisions are complicated by perhaps
thousands of constraints that must all be considered and satisfied together. Any set of
decisions that satisfies all constraints on the network is afeasible solution to the network
flow problem. A feasible solution may often be found by heuristic guidelines, but it is
unlikely that heuristic methods will yield an optimal solution [6]. The optimal solution to
these problems is the one that both satisfies all the constraints and minimizes the costs
involved in executing the solution. Execution is the process of physically implementing
the theoretically planned solution and actually moving flow from sources to destinations.
Finding the optimal solution to a large network flow problem can be extremely
difficult, requiring a significant amount of computing resources and a great deal of time.
Established linear programming methods exist for formulating and optimally solving
these problems. The formulation involves setting down the decisions to be made in the
problem as collections of variables, defining parameters with single values, codifying
constraints as equations in those variables and values, and describing the objective as a
function to be minimized (or maximized). With such a formulation a computer can
manipulate the millions of resulting possibilities through proven rigorous methods and
produce an optimal solution [7].
Often these problems require integer values for some or all of their decisions.
UPS, for example, cannot fly 1.7 planes between Boston and Dallas. Mixed Integer
variables must be integer. The general problem of solving a mixed integer programming
problem optimally is NP-complete [7]. Thus no polynomial-time algorithm for solving a
generic mixed integer problem has yet been found [5]. Typical real-world scheduling,
routing, and transportation problems are very large, and so are very expensive in time and
resources to solve as a whole. One approach to take is to decompose large problems into
smaller ones, and solve those directly [9]. The benefits to this approach are speed of
solution and economy of computing resources, but often the objective value suffers from
the artificial boundaries imposed on the problem. Applying a provably optimal algorithm
to the whole problem, rather than isolated pieces of it, is guaranteed to produce at least as
good a solution, and probably a better one.
For the dynamic flow networks discussed thus far, the dynamic parameters of the
network, those that change over time, can be either deterministic or stochastic in nature.
Deterministic parameters change over time according to some function, which can either
be known or unknown to network planners. If all other network parameters (including
time) are held constant, the deterministic network parameters will also remain constant.
Stochastic network parameters change according to random event incidence - their
values are determined by a probabilistic function. Even with all static and deterministic
parameters held constant, the actual realization of a stochastic network parameter cannot
be perfectly predicted. Many network flow problems that model real-world systems have
stochastic characteristics. Transportation networks face weather delays and personnel
availability issues. Logistics and supply networks might have to accommodate
processes. The future generally cannot be known, only predicted. Network parameters
are expected to change, but the exact time and magnitude of such changes can only be
estimated. Systems that model flow-based networks and include random events and
parameter values that affect the final solution are called stochastic network flows.
Solving stochastic network flow problems involves not only routing flow from source to
destination, but also reacting to events that randomly occur and adjusting the solution to
compensate.
Because stochastic network parameters change unpredictably, one way to attack
network flow problems involving stochastic parameters is to solve them repeatedly over
time. The frequency of re-solution depends on the impact of random events on the
existing solution, which varies from problem to problem. Significant changes to network
parameters may require immediate replanning to avoid a drastic increase in total cost.
Stochastic network flows that result from airline flight plans and the execution of
logistics supply plans are real-time systems. A real-time system in this context is a
dynamic network flow that models actual events and reacts to changes in network
parameters as (or soon after) they occur. These systems are often volatile, as unexpected
events can transpire with little or no warning, and require frequent replanning to maintain
feasible solutions. The time duration of many real-time planning systems is unbounded,
either because there is no desired end to the system being modeled or because the exact
week or next year, but indefinitely, with recurring (and possibly shifting) demand over
time.
It is undesirable to plan deterministically over even an approximation of an
unbounded time horizon because the conditions of the network will probably change. So
the question becomes, how can mathematical programming techniques be used in a
stochastic real-time system for planning and execution over an unbounded time horizon?
It is the goal of this thesis to explore an approach to planning and execution of
stochastic real-time network flow problems. The approach taken is to apply linear
programming, a deterministic network solution technique, to a stochastic real-time
network flow problem with an unbounded time horizon by solving finite sections of the
entire problem, one by one, over time. The solution to a single finite section is called a
partial plan, because it plans the movement of flow for only part of the problem's time
horizon. We therefore refer to our approach as the partial planning approach.
Figure 1 presents some common ways to classify network flow problems,
including static vs. dynamic networks, deterministic vs. stochastic events and parameters,
and fixed vs. unbounded planning time horizons. We are interested in planning a
dynamic real-time system with stochastic network events, and will focus our analyses on
a military logistics planning problem. This problem has the characteristics we are
interested in investigating, and a linear programming model is readily available for
Static Networks:
Water and Electricity supply networks Dynamic Networks:
Deterministic Network Parameters
Stochastic Network Events
Fixed duration Construction site Single season Cruise
planning horizon materials supply Line ship schedule
Unbounded Goods delivery network Airline flight plans,
planning horizon to meet known and Military logistics recurring demand planning and execution Figure 1: Classification of Common Network Flow Problems
The military logistics planning problem includes the movement of ammunition from interior United States depots to coastal US ports. Stochastic events encountered in
this problem include transportation delays, the loss of network links between depots and ports, and sudden shifts in demand if there is a crisis or contingency. Using this problem as a case study, our goal is to gain insight into the best way to apply the partial planning approach to real-time network flow problems under various network conditions. In addition, we shall examine the benefits of timely and accurate network parameter estimation and the effects of stochastic events on plans already in place.
detailed explanation of the objectives of the thesis. Chapter 3 explores the details of
solving linear programs and running scenario analyses, and provides specific
implementation details for the solution methods used in this thesis. In Chapter 4, the
specifics of the military logistics planning problem are explained, and the problem
formulation is given. Various scenario analyses and relevant results are presents in
Chapter 5. Chapters 6 and 7 provide a summary of the research accomplished,
2. Intent and Objectives
The intent of this thesis is to determine which methods for applying the partial
planning approach produce the least expensive solutions to various classifications of
network flow problems. In this chapter we define three objectives which will assist in
making that determination. Each objective involves the evaluation of various forms of
the partial planning approach as applied to specific network flow situations. We begin by
describing the details of the partial planning approach and the forms in which it can be
applied to various types of network flow problems.
2.1 The Partial Planning Approach
The partial planning approach to solving a network flow problem with an
unbounded time horizon involves the decomposition of the horizon into finite sections,
which are then solved using deterministic linear programming techniques. The finite
solutions, referred to in Chapter 1 as partial plans, are executed serially over time to route
flow in the original, unbounded network flow problem.
Several aspects of the approach can be varied to produce more efficient, or
cost-effective, solutions to the same problem. More efficient solutions are relatively less
expensive than other solutions. Variable aspects include the length of time for each
between partial plans. Each aspect is described in greater detail in the following sections
of this chapter. Specifying a value for every one of these aspects defines a particular
variant of the approach. By applying a number of variants to the same network flow
problem, we will be able to determine the variant that produces the least expensive
solution. The procedure for applying a specific variant is described in Section 3.4.
Within each variant, the values for partial plan length and replan delay time are consistent
- every partial plan is the same length, and each are combined with the same degree of
continuity.
Once a partial plan begins execution, the flow determined by that plan cannot be changed. Events that occur during a partial plan's execution cannot be compensated for
by that plan. The effects of such events on network parameters have to be incorporated
into the generation of the next partial plan.
2.2 Partial Plan Length Effects
The first objective of this thesis is to determine the effects of the length of each
partial plan on the cost of a given network flow problem's solution. To isolate the effects
of plan length from those of the other aspects mentioned in Section 2.1, the variants of
the approach used for this determination all use a periodic replanning schedule and ignore
plan continuity. Periodic replanning indicates that every partial plan finishes execution
before a new partial plan begins. Replans thus occur at regular time intervals over the
To fully appreciate the effect partial plan length has on the solution, we need to consider two major types of network flow problems: deterministic and stochastic. We
expect that for deterministic networks, longer partial plan variants will produce
consistently lower cost solutions because each partial plan is able to optimize over a
longer period of time. In stochastic networks, however, the longer partial plan variants
will likely be adversely affected by each partial plan's inability to compensate for change.
Section 5.1 details the application of various partial plan lengths to both
deterministic and stochastic networks. The results found there provide insight into the
relationships between partial plan length and solution cost.
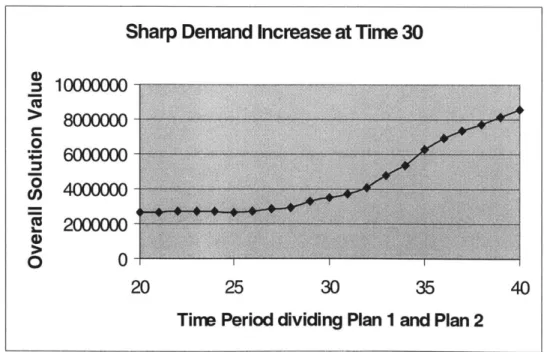
2.3 Network Parameter Forecasting and Assessment
Deterministic solution methods like linear programming depend on accurate and
timely information about the real values of network parameters. The termforecast refers
to a prediction of future network parameter values. Assessment is the process of
determining present network parameter values. We have already discussed how
stochastic events can affect the parameters of a flow network and cause the continued
execution of a currently executing partial plan to become extremely expensive. A
forecast of the effects of such events on the network's parameters would allow a new
partial plan, which includes the new parameter information, to be generated and replace
say it is replanned on-demand.) If a forecast were unavailable, timely assessment of the
network's conditions after an event has occurred (and immediate replanning after the
assessment) would minimize the negative effects of the event.
Our second objective is to determine the qualitative value of timely event
forecasting and network parameter assessment. We can make this determination by
examining how solution cost changes with the timeliness of a forecast (how long before
an event the event is predicted) or assessment (how long after the event its effects on the
network become known). In actual real-time systems, accurate forecasts require
expensive predictive mechanisms that are based on current network parameters. Timely
assessments similarly require expensive constant network monitoring mechanisms. If a
real-time system already has such mechanisms in place, this objective should determine
the savings such mechanisms provide under a partial planning approach. Otherwise the
values derived for timely forecasts and assessments should indicate what savings could
be gained by implementing them.
Section 5.2 explores the values of forecasting and assessment for events that
cause sustained increases in a network's demand function.
2.4 Plan Continuity
An unavoidable result of using linear programming with the partial planning
partial plans, whose network flow problems differ from one another only by a single
network parameter value, could be wildly different, but equivalent, solutions to almost
the same problem. The real-world context of network parameters cannot be transferred to
the linear program used to solve the problem. Any information not formulated as a
constraint on the network itself is not even considered in the solution.
In practice, there are often situations in which other constraints, outside of those
in the linear program, need to be part of the solution. For the partial planning approach, each partial plan is a coherent, optimal flow of supply from sources to sinks over the
length of the partial plan to meet demand. It is also desirable, however, to have coherent
flow from one partial plan to the next. We call this desire plan continuity - the need for
gradual change from one partial plan's flow schedule to the next. This is especially true
of systems that have significant human participation. Computers can adapt effortlessly to
plan discontinuity, possibly taking different actions to achieve the same result in each
successive partial plan. Human beings typically need time to adjust to such change,
especially if each partial plan establishes a pattern of flow that is then changed at every
partial plan boundary. During that time, called plan integration time, the new partial plan
is grafted onto the old one so that the change is reasonably gradual.
The mechanism through which two partial plans are grafted depends on the
specific problem being solved. It is beyond the scope of this thesis to precisely model
such a mechanism even for the case study problem, but we can approximate the effects of
partial plan and the new one are sacrificed in order to allow the integration to occur. If
the new partial plan were generated in response to a network event the old plan was
incapable of handling inexpensively, then the most cost-effective action to take would be
to execute the new plan immediately. But if the two plans need to be integrated, then the
most cost-effective action cannot be carried out immediately. The new partial plan would
be executing in full only after the integration time, and would thereafter be providing
optimal flow. Thus the real effect of plan integration is a gradual shift from the solution
cost of the old partial plan to that of the new one.
We simulate this effect by leaving the old partial plan in execution during the plan
integration time, and then switching completely over to the new partial plan at the end of
that time. This results in slightly more expensive solutions overall, but provides a good
approximation of the effect of plan integration time on solution cost. We refer to our
approximation as replan delay time because the execution of new partial plans is delayed
rather than integrated.
Since many of the real-time systems to which we wish to apply our partial
planning approach require some degree of plan continuity, it is our third and final
objective to determine the effects of replan delay time on solution cost. Section 5.4
specifically addresses the effects of replan delay time as applied to networks with
significant stochastic events. Section 5.5 also examines replan delay time, but does so
together with the other aspects of the partial planning approach in simulated stochastic
3. Implementation Details
This section provides some details on the methodology of using linear
programming to solve network flow problems. The real problem must first be distilled
into collections of decisions to be made, and sets of parameters with values that model
actual network parameters. Once this has been done, the formulation can be codified and
used to generate results. This section also defines the terms used throughout the
remainder of the thesis and describes the process of scenario analysis.
3.1 Definitions
Throughout this chapter and the remainder of the thesis we use the following
terms to describe certain aspects of the partial planning approach and the scenario
analyses presented in Chapter 5.
The term scenario is used to describe a specific real-world situation involving a
network flow problem that must be solved through planning and execution. An overall
planning horizon refers to the length of time over which an entire scenario occurs and
must be planned. Sections 5.1, 5.3, and 5.5 use long overall planning horizons to
approximate scenarios whose planning horizons would otherwise not be bound by a fixed
time duration. The overall planning horizon is decomposed into finite sections, and the
network flow problem in each section is solved to form a partial plan. When every
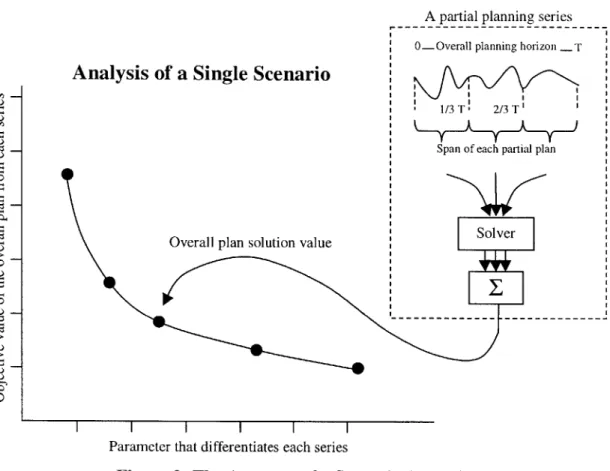
A partial planning series 0-Overall planning horizon .T
Analysis of a Single Scenario
1/3 T 2/3 T'
03 Span of each partial plan
ISolver
Overall plan solution value
0
Parameter that differentiates each series
Figure 2: The Anatomy of a Scenario Analysis
Each point on the graph is produced in similar fashion, by using a different parameter value and solving a partial planning series. The scenario under analysis determines such values as the demand function (shown here under the partial planning horizon) and other network parameters (not shown) contained in the partial plans.
single plan is called the overall plan. The length of a partial plan is the number of time periods over which it plans; the span is the set of time periods a partial plan contributes to an overall plan. A (partial planning) series is a collection of consecutive partial plans that
together make up an overall plan. Data used to analyze each scenario in Chapter 5 is gathered by generating and solving a number of partial planning series, for the same overall planning horizon, that differ only by one or two parameters. For each of the two scenarios in Section 5.1, the parameter that varies from series to series is partial plan length. The scenario in Section 5.5 contains series differentiated both by partial plan
length and replan delay time. The analysis then consists of plotting the gathered data and
interpreting the graph. Figure 2 illustrates the relationships between these terms.
The network flow problem contained in each scenario has a specific set of
network conditions. A network's conditions are its parameters (like demand) and
characteristics (deterministic vs. stochastic demand, periodic vs. on-demand replanning,
etc.) We use the term stochastic network conditions to refer to a network with one or
more parameters or characteristics that behave unpredictably over time. Stochastic
demand indicates that the demand function over a time horizon can deviate randomly
from the values used to plan for that horizon.
An overall solution is the cost of executing all partial plans in a series (in effect,
executing the overall plan for an overall planning horizon). This cost is the sum of the
execution costs expressed by each partial plan's objective function value. An efficient or
cost-effective solution is an overall plan for an overall planning horizon whose total
objective value (execution cost) is lower than that of other overall plans in the same
scenario analysis. An optimal solution is more efficient than any other solution to the
same scenario.
3.2 Formulating the Model
A problem formulated as a linear program and formatted for use with a
structure of the network (nodes and edges), the equation for the objective function, any
named sets (i.e. the set of airplanes or the set of supply warehouses), all parameters and
decision variables, and the equations (in terms of parameters and decision variables) for
constraints present in the network. In essence, the model represents an entire class of
possible problem instances. The data refers to all information that is specific to a single
instance of the problem defined in the model. It includes the members of defined sets
(i.e. the name of each warehouse) and the values for defined parameters. The demand
function and any equation coefficients are also declared as part of the data. The
Appendix contains sample model and data files to illustrate the distinction.
3.3 Finding a Solution
Solving an instance of a problem requires feeding the model and the data to a
computer program designed to solve generic linear and mixed integer programming
problems. All problems presented in this thesis were solved using a commercial software
package, CPLEX 6.6.0 with AMPL. AMPL facilitates the formulation of the model and
data with its own programming language. The model and data are first defined in
separate files, each with its own syntax. Then the two files are entered into the AMPL
command processor. The processor combines the model and the data into a complete
problem, formats the problem for solution, and sends the formatted problem to CPLEX.
CPLEX does the work of finding an optimal solution, and then passes the results back to
AMPL for display. The model and data files in the Appendix are written in AMPL's programming language.
3.4 Solving a Partial Planning Series
Plugging a model and a data file into AMPL and finding a solution constitutes the
generation of a single partial plan. Since the model defines the structure of the problem
and not its specific instance, it remains largely unchanged for each partial plan of a single
partial planning series, except for minor modifications to the objective function.
Successive partial plans cover different spans of time from the problem's planning
horizon, so each plan requires its own data file. Thus a partial planning series for a long
overall planning horizon is typically made up of a single model file and a series of data
Planning Horizon Time Demand Function
Partial Plan 1 Partial Plan 2 Partial Plan 3 Partial Plan 4
Data Files
Formatted Problem
AMPL CPLEX
-- 1 Optia
Results formatted Result
Model File for display
(Entered only once)
Figure 3: Solving a Partial Planning Series
Each data file contains a section of the demand function, as well as any other network parameters. The model file is first entered into AMPL. Then a single data file is entered. AMPL then sends the complete formulation to CPLEX, which solves the problem and returns the result
files that contain separate sections of the network's parameter values (over time). To
solve a partial planning series, the model file is first entered into AMPL, and then each
data file is entered and solved in turn. See Figure 3 for a detailed illustration of this
process.
Each successive partial plan builds on the partial plans developed so far. The
partial plan for time periods 100-120, for example, is not solved in a vacuum; the plans
developed for periods 0-100 provide the initial network conditions (including flow) for
the 100-120 partial plan. These initial conditions are implemented by first loading the
solution to the previous partial plan into AMPL along with the new partial plan's data
file, and then fixing those loaded values. New partial plans take as fixed the decisions
made by all prior partial plans in a series, because in a real execution those decisions
would already have been carried out by the time the new partial plan takes effect. When
decision variable values are fixed, the solver treats them as network parameters.
Once the initial conditions are fixed, the objective function is changed to calculate
cost only for the span of time periods covered by the new partial plan. At the end of the
series, when all partial plans have been solved, the overall objective value of the solution
to the series is the sum of each partial plan's objective function value. This value
3.5 Flow Pipelining
The overall plan produced by solving a partial planning series is used to schedule
flow through the network for the duration of the overall planning horizon. Regardless of
the length of each partial plan, their combination must manifest itself as a continuous
flow schedule over time. Even though an overall plan for 200 periods may have been
generated by a series of 20-period partial plans, the execution of that overall plan over
those 200 periods should seem as if the whole horizon were planned at once. If each
partial plan considered the end of its 20 periods as the end of the entire overall plan, flow
would stop temporarily at each boundary between consecutive partial plans. The partial
plans would have no reason to send any flow that would arrive after the ends of their own
spans.
In order to avoid stopping flow between spans of partial plans in a series, the flow
schedule must be viewed as a pipeline of flow from source to sink. The flow pipeline for
the case study network is made up of discrete trucks and trains. Each truck or train takes
a certain amount of time to travel from depot to port. Without flow pipelining, each
single partial plan sends only the necessary flow to fulfill demand for its span of time. If, for example, a train takes four periods to reach its destination, no train would ever
intentionally be sent later than four periods before the end of a planning span.
Nevertheless, efficient flow across partial plan boundaries demands that the pipeline be
kept as full as possible. To this end, in every scenario in Chapter 5, each partial plan
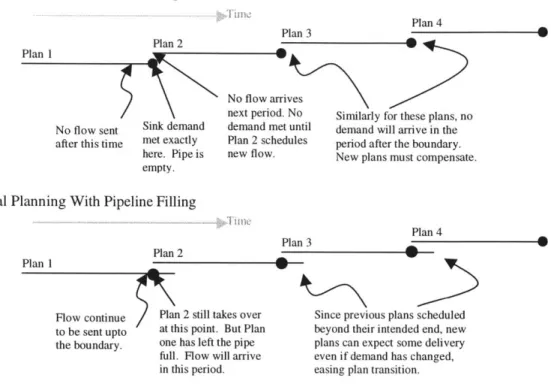
Partial Planning Without Filled Pipeline Plan 4 Plan 3 Plan 2 Plan I No flow arrives
next period. No Similarly for these plans, no No flow sent Sink demand demand met until demand will arrive in the after this time met exactly Plan 2 schedules period after the boundary.
here. Pipe is new flow. New plans must compensate. empty.
Partial Planning With Pipeline Filling
Plan 4 Plan 3
Plan 2 Plan 10
Flow continue Plan 2 still takes over Since previous plans scheduled to be sent upto at this point. But Plan beyond their intended end, new the boundary. one has left the pipe plans can expect some delivery
full. Flow will arrive even if demand has changed, in this period. easing plan transition.
Figure 4: Flow Pipelining across Partial Plan boundaries
Each Plan (shown as a horizontal line representing the time over which it plans) is a partial plan in a series with the other plans adjacent to it. The dots represent the ends of each partial plan's span. Note that with pipeline filling, partial plans actually extend beyond their spans.
plan takes over, the pipeline is not empty. See Figure 4 for an illustration of this
4. The Case Study Model
The test problem for analyses in this thesis involves military logistics planning
and execution. The United States military has conventional ammunition storage depots
spread throughout the interior of the country. During peacetime these depots act
primarily as long-term storage. But during armed conflicts, these depots supply the bulk
of US forces overseas with conventional munitions. Over the duration of the conflict, the
bulk of the munitions from these depots must be transported to ports on the proper coast,
and then taken by ship to the overseas theater of war. In a worst-case scenario, the
United States would have to sustain two full-scale armed conflicts, one in Asia (off the
West Coast) and one in the Near East (off the East Coast). Such a scenario would require
the use and supply of all interior depots and coastal ports, with sustained heavy demand.
This is the scenario assumed for analysis.
This chapter describes a network flow problem and a linear program formulated
to model the existing conditions of the military supply infrastructure. Munitions are
stored at five primary depots, which serve as the source nodes in the flow-based network.
There are three coastal ports, two on the West Coast and one on the East Coast. Because
we are modeling conflicts across both oceans, all three ports will be utilized. For the
purposes of this thesis, only the supply network from depot to port is considered.
Demand at each port is modeled as the recurring arrival of discrete ships, but the shipping
4.1 Transportation
Between the depots and the ports is a ground transportation network. This
network involves two means of conveyance: truck and rail. Trucks typically have shorter
transport times than rail, but carry less capacity and are more expensive to operate. In
general, rail is the preferred mode of transport unless time constraints dictate the use of
more expedient means. For analyses involving stochastic transportation delays, rail
transport has a higher incidence of delay than truck transport [8].
4.2 Containers, Depots and Ports
The munitions themselves are modeled as the types of containers in which they
are shipped. Depots store munitions safely spread out in fortified bunkers. Before
munitions can be shipped, they must be packed into shipping containers. The model
allows twenty distinct container types. The container types represent different
configurations of munitions within a single container. Overall demand for munitions is
quantified as demand for each specific container configuration. Likewise, total supply at
each depot is composed of the supplies of each container type.
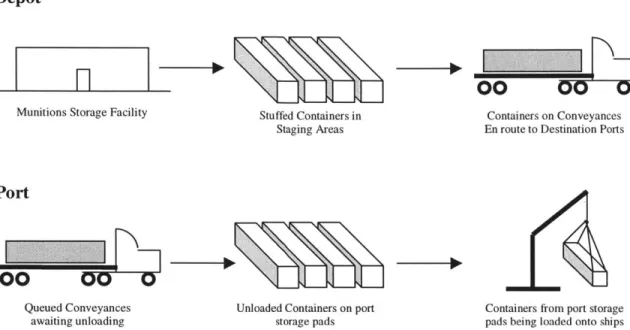
In our example problem, container stuffing at the depots takes one time period.
After being stuffed, the containers are assumed to be placed on staging areas in
preparation for shipping. Each depot has limited stuffed-container storage space, of
which each type of container requires an equal amount. Similarly at the ports of
Munitions Storage Facility Stuffed Containers in Staging Areas
Queued Conveyances Unloaded Containers on port
awaiting unloading storage pads
00
-Containers on Conveyances En route to Destination Ports
400
Containers from port storage pads being loaded onto ships
Figure 5: Munitions Movement through Depot and Port
eventual movement to and loading onto ships. It is from the container stock on these
storage pads that port demand is met. In addition, each depot has a container generation
rate that specifies how many total containers the depot can stuff per time period.
Likewise each port has a specific rate at which containers can be unloaded from
conveyances. Figure 5 illustrates the stages of container movement from depot storage
facilities to ship loading areas.
4.3 Net Explosive Weight
Safety is a primary concern when munitions are being moved. Restrictions on the
total effective amount of explosive material (Net Explosive Weight, or NEW) present at
Depot
each depot and port are limited by NEW restrictions. Each container type is assigned a
NEW value based on its contents; the number of each container type at a single location
multiplied by the NEW value for each container type determines the total NEW present at
that location.
4.4 Late Delivery
Although the ideal solution to the munitions transportation problem would fulfill
all demand requirements exactly on time, this goal is not always attainable. The model
allows for late arrival of demand, but assesses a heavy penalty for every period a
container arrives past its intended arrival time. Clearly late arrivals are discouraged, but
sometimes necessary if demand increases unexpectedly during plan execution or if the
system does not have sufficient throughput capability to meet demand. Late flow is
modeled by network edges that progress backwards through time, one period at a time, at
port storage pads. Thus a container that arrives at time 3, but was intended to arrive at
time 1, would flow on late arcs from time 3 to time 2, and then from time 2 to time 1. In
traversing two late arcs, the container would thus be penalized for arriving two periods
late.
4.5
Decision Variables
The decisions to be made in the course of generating a feasible plan to solve this
Time
0 1 2 3 4 5 6
Containers being stuffed at depot
W0\ Containers R awaiting _0 loading X Conveyances in transit Containers on
Q
conveyances queued at port Containers transferred to P storage pads Containers waiting for shipsL
Late arrivals intended to Containers being loaded onto ship (satisfying demand) satisfy past demand
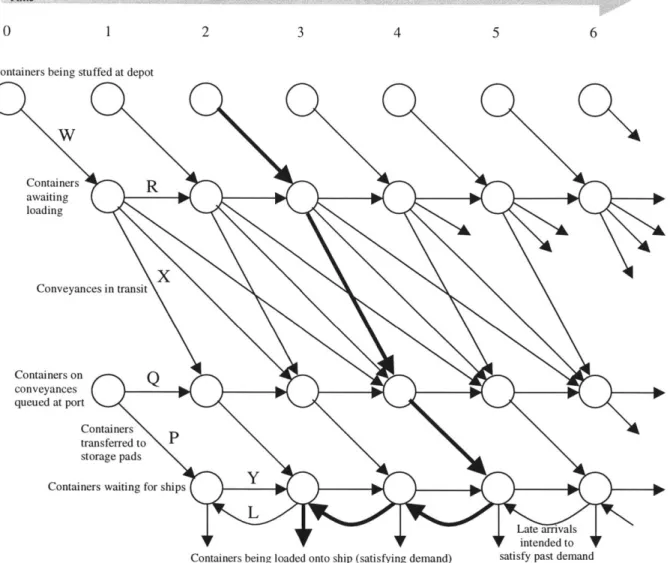
Figure 6: Container Movement Network, from Depot to Port over Time Each edge represents a decision variable in the model. Each row of nodes is a single physical location. Each column is the flow to and from every location in a single time period. Arcs that travel vertically carry flow from one location to another. Horizontal arcs represent flow that remains in the same location for more than one time period. The bold edges illustrate the flow of a container stuffed at time 2 and intended for delivery at time 3. Although containers don't actually travel back in time, they flow to earlier time periods to fill unsatisfied past demand and indicate the number of late containers per period.
munitions from depot storage facilities to port shipyards in a time-space network [1].
Each node in the figure represents a physical storage location at a depot or port, and each
edge represents the movement of munitions. The quantity of ammunition associated with
right; each horizontal row of nodes is actually the same location at a different time. The
edge labels correspond to the decision variables as described in the model formulation
(Section 4.7), and text labels are also provided. For the sake of simplicity, Figure 6 only
depicts a single depot and port, and edges for the flow of one container type. The
complete problem network has similar connections to the one shown, but many more
nodes and edges.
4.6 Objective Function
The best solution to this problem delivers all required demand in the most
cost-effective manner possible. Several factors contribute to the total cost of munitions
shipped during a plan's execution. Each truck or train costs some amount per container
to operate. A severe penalty for late containers is applied in order to ensure timely
delivery whenever possible. Transporting any amount of explosives is a dangerous
undertaking, and transporting more at once increases the chances of an accident
occurring; therefore a penalty for the total NEW in transit per time period is assessed to
limit the total amount being transported at any one time. Finally, there is an added cost
for queued conveyances at ports; while they are waiting to be unloaded, they are not
being used for further transit. The exact function, in terms of decision variables and
4.7 Mathematical Formulation
The mathematical formulation for the test problem, taken from [4], is given
below. The linear program used to generate the results found in this thesis is based
directly on this formulation.
SETS
* Ns - The set of depots
* Nd - The set of ports
" V - The set of conveyance types
" B - The set of container types
DECISION VARIABLES
* Xbijkt - the flow of container type b e B from depot i E Ns to port
j
e Nd onconveyance k e V at time t = 0, 1, 2, ...
" Q jkt - the number of containers of type b e B on conveyances of type k e V
enqueued at port j E Nd at time t = 0, 1, 2,...
" Ybjkt - the number of containers of type b e B at port
j
E Nd that are unloadedfrom conveyances of type k e V at time t = 0, 1, 2, ... and taken to port storage pads
* Pbjt - the number of containers of type b e B at port
j
e Nd that are located onport storage pads and ready for retrieval for ship loading at time t = 0, 1,
2, ...
" Rbit - the number of containers of type b e B already stuffed and waiting in staging area for transportation at depot i e Ns at time t = 0, 1, 2, ...
" Wbit - the number of containers of type b e B stuffed and delivered to staging pads for transportation at depot i e Ns at time t = 0, 1, 2, ...
* Ljb(t+1)t - The number of late containers of type b e B which arrive one period late
PARAMETERS
" Tijk - travel time from depot i e Ns to port
j
e Nd on conveyance k e V" s b - supply of container type b e B at depot i e Ns over the entire planning horizon
" d"jt - demand of container type b e B at port j e Nd at time t = 0, 1, 2,
" c ijk - unit cost of moving container type b e B from depot i e Ns to port
j
e Nd on conveyance k e V" gjk - maximum number of containers unloaded from conveyance k e V at port
j
e Nd per time period* nb - Net Explosive Weight of container type b e B
Sli
- maximum accumulation of NEW allowed on storage pads at portj
e Nd * fjk - detention costs per container per time period on conveyance k e Vqueued at port
j
e Nd* - the maximum container stuffing rate for depot i e Ns
STli
- maximum accumulation of NEW allowed in staging areas at depot i e Ns g - unit safety penalty cost of NEW in the transportation networkl
lcjb - the per-period cost of late arrival of container type b E B to port
j
e Nd* prijb - the relative priority of on-time delivery of container type b e B to port
j
E Nd
OBJECTIVE FUNCTION
Minimize:
cX + f Q +g n R + Q ,+p
t=O be B (ij,k) je Nd keV beB beB iE Ns je Nd kEV
T
+~ I I I1c jb pri jb(t+L)t t=O jENd beB
CONSTRAINTS Subject to: T t=b W b+R _ -R, b Vi e Ns,be B -XXt =0 j,k Vie Ns,be B,t=0,...,T X b +Q (t1-Q Yb =0 ieNs Jyb Y +pb+Pa jk(t-1) j(t-1) keV pb it d bjt beB beB n R bEB bE=B
All Flows Al Fow W Wt Rb it' Xh ijkt'jQkt'I jkt' Qb Y pb jtIb(t+1)_L >0 and integer.
Vje Nd,k eV,be B,t =0,...,T Vj e Nd,be B,t =0,...,T Vie Ns,t=0,...,T Vje Nd,k eV,be B,t =0,...,T Vie Ns,t=0,...,T Vj e Nd,t =0,...,T
5.
Analyses and Results
For an explanation of the terms used throughout this chapter, refer to Chapter 2 and
Section 3.1.
In this chapter we present a number of scenarios that model situations
encountered during the planning and execution of real-time network flows. Each
scenario is planned using specific variants of the partial planning approach. These
variants of the approach include altering the length of each partial plan, generating new
partial plans on either a periodic or on-demand replanning schedule, and changing the
allotted replan delay time for partial plan integration. Each analysis is designed to
provide insight into the effectiveness of the partial planning approach as it could be
applied to a real-would scenario. The analysis of each scenario consists of solving a
number of partial planning series (as described in Section 3.4), each of which uses a
different variant of the partial planning approach, and determining which variant
produces the most cost-effective solution to the network flow problem in that scenario.
5.1 Partial Plan Length
The munitions logistics planning problem involves the transportation of munitions
from interior depots to coastal ports to satisfy the demand for munitions overseas. This
duration of involvement. The duration of the conflict, and consequently the duration of
demand, is not known but assumed to be extensive. A transportation schedule needs to be
devised to move ammunition efficiently from depots to ports through a ground
transportation network for the duration of the conflict. Once devised, the schedule must
be executed and munitions shipped according to it. Since the extent of the planning
horizon for this problem cannot be determined, a sensible approach is to solve and
execute successive partial plans, each spanning a finite length of time, until supply is no
longer demanded.
5.1.1 Partial Plan Length Scenario Description
At the start of the conflict, the transportation network is assumed to be empty - all
conventional munitions are in depot storage facilities. Once the demand for munitions
begins, a partial plan is solved for some number of periods, and depots start to send
supply to ports following that partial plan. When the partial plan ends, a new partial plan
is solved and executed. In real-world execution this process would continue indefinitely,
or until demand ceases. In this scenario, indefinite demand is approximated using an
overall planning horizon significantly longer than the length of a single partial plan. The
analysis is concerned with optimizing the solution to a long overall planning horizon
using a periodic replanning approach. For the purposes of this analysis, replans only
occur periodically, and each partial plan in the same overall plan has the same length.
We are also interested in discovering how overall solutions generated using the periodic
We present two separate scenarios for comparison. The first contains a strictly
deterministic demand function that changes predictably over time, and no stochastic
network events. The second incorporates stochastic demand changes and transportation
delays. In both scenarios, once a partial plan begins execution, it cannot be changed - the
plan must be followed exactly. To analyze each scenario, we define a single demand
function over a 400 period horizon. We then use the process described in Section 3.4 to
solve a number of partial planning series. Each series is solved using a different length
for the partial plans. When the objective function values for each series' solution is
plotted against the partial plan length for that series, the relationship between partial plan
length and overall objective value for the particular network conditions of the scenario
will be known. These relationships satisfy the first objective of this thesis (see Section
2.2).
In the stochastic demand scenario, several types of events could occur over the
course of a single partial plan's execution. First, demand for munitions could change
unexpectedly. Second, the truck and rail transportation plans produced by each partial
plan may not be met during execution. In the model transportation delays occur with
small probability each time a vehicle is sent from a depot to a port. For rail, the values
used are: 5% chance of single-period late arrival, 2% chance of three-period late arrival,
and 1% chance of five-period late arrival. All trucks have a 4% chance of being delayed
one period. These numbers are not derived from actual data, but are intended to produce
sufficient delay to affect solution quality without rendering all partial planning series
In both scenarios the demand profiles (at the port of embarkation) are derived
from a schedule of ship arrivals and departures. Each port has a schedule of ships that
arrive to be loaded, depart for abroad to be unloaded, and return to be loaded again. In
the stochastic demand scenario, increases in munitions requirements overseas cause the
temporary addition of extra cargo ships to each port at various times during the scenario's
execution.
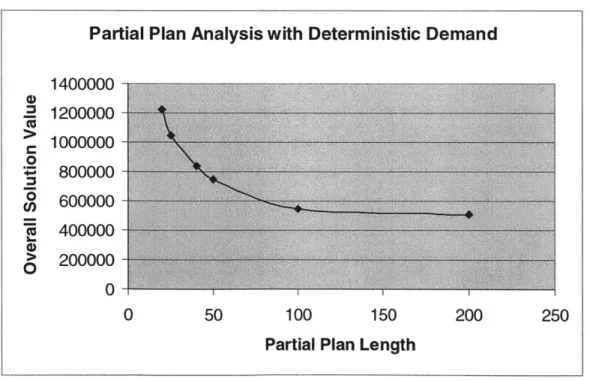
5.1.2 Deterministic Demand Results
Figure 7 shows the relationship between partial plan length and overall objective
value in the deterministic demand scenario. In the absence of stochastic events, the
Partial Plan Analysis with Deterministic Demand 1400000 4) 1200000 C 1000000 0 800000 600000 i 400000 R nw 200000 0 0 50 100 150 200 250
Partial Plan Length
Figure 7: Periodic Partial Planning with Deterministic Demand (Lower overall solution value is better)
model can accurately predict and schedule on-time delivery of all demanded munitions.
Long partial plans achieve greater solution efficiency and drive down the objective cost
of plan execution because they each have more information with which to make optimal
decisions.
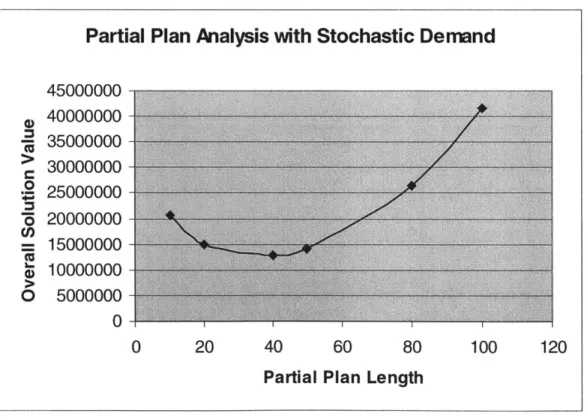
5.1.3 Stochastic Demand Results
Figure 8 relates partial plan length to objective value when the transportation
network and demand function are subject to stochastic events. The results show that the
events have a negative impact on both small and large partial plan lengths. Very small
partial plans suffer because they may need to send large amounts of ammunition to
Partial Plan Analysis with Stochastic Demand
45000000 40000000 35000000 30000000 25000000 0> 20000000 -15000000 0 U U U . ...--- *... ... . 0 f I f Af . ..---6... i10000000 - -0 5000000 - -0 0 20 40 60 80 100 120Partial Plan Length
Figure 8: Periodic Partial Planning with Stochastic Demand Also includes random transportation delays. Lower overall solution value is better
supply excess demand from previous events, and lack the time to do so at low cost. Very
long partial plans also perform poorly because events that occur early in each partial
plan's execution are not compensated for until the beginning of the next partial plan,
causing significant late demand penalties. In-between these two extremes a better
solution can be obtained. Mid-length partial plans (about 40 periods long) are able to
recover faster than long partial plans from stochastic network events, and send flow more
efficiently over longer periods of time than short partial plans.
5.2 Forecasting Demand
Warfare is inherently unpredictable. Logistics support must be able to adjust to fit the needs of the battlefield. Without knowing the future, logisticians can only act based
on prediction and intelligence. In a real-time system, information about what has
happened before and what might happen soon has a serious impact on the immediate
decisions that must be made. Better forecasting and information assessment leads to
overall plans that more closely match actual conditions and result in more efficient
solutions.
Our second objective is to answer the following question: what is the qualitative
value of more accurate information on past, present and future demand conditions?
Accurate information is essential to achieving optimality when applying deterministic
planning methods to scenarios in which substantial stochastic demand events can occur,