Extended-Braking-Stiffness Estimation Under Varying Road-Adherence Conditions
Texte intégral
Figure
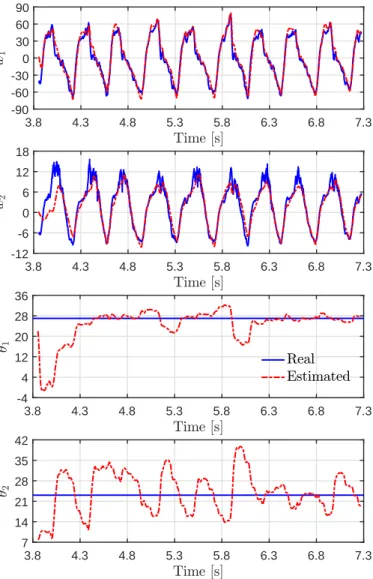
![Fig. 4. Real vs estimated XBS. The switched adaptive observer exhibits an overall better performance than the augmented-state observer of [10].](https://thumb-eu.123doks.com/thumbv2/123doknet/14445217.517636/7.918.467.845.81.329/estimated-switched-adaptive-observer-exhibits-performance-augmented-observer.webp)
Documents relatifs
Abstract— We extend previous works on real-time estimation, via algebraic techniques, to the recovering of the switching signal and of the state for switching linear systems..
By taking advantage of the guaranteed nature of the numerical results provided by interval analysis, it is possible to solve the prob- lem of computing all sequences of controls
A new nonlinear observer design technique for vehicle slip angle estimation using inexpensive sensors normally available for yaw stability control applications is developed. The
Nevertheless, wheel speeds could become unrelated to the vehicle velocity when driving in slippery conditions. In order to compensate the errors caused by wheel slip, GPS signal is
Meanwhile the 2 nd LPV braking monitor design, when the absolute value of the normalized load transfer at the rear axle is less than 0.75, the vehicle roll stability is determined
His research interests include robust on-line fault diagnosis for uncertain dynamical nonlinear systems, Fault Detection and Isolation (FDI) and Fault Tolerant Control (FTC)
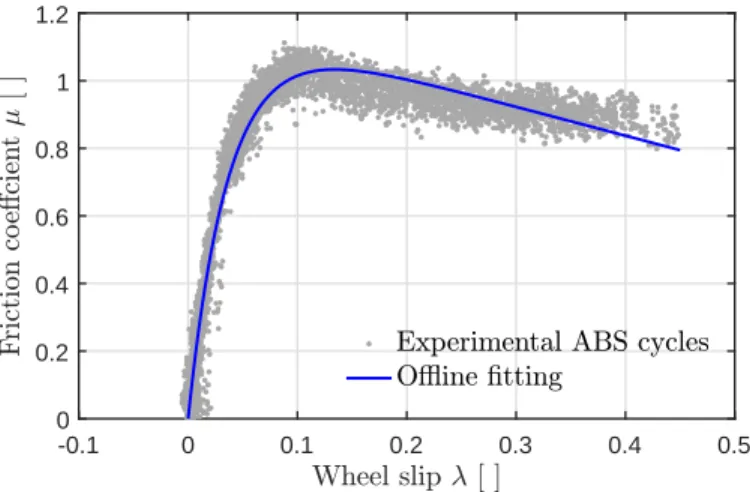
Abstract: In the context of antilock braking systems (ABS), we present a two-phase hybrid control algorithm based on the tyre extended braking stiffness (XBS), that is, on the slope
In this work, we propose a different technique for the estimation of variable stiffness for the Agonist-Antagonist VSA device, which tries to overcome some of the limitation of
