LIBRARY
OFTHEMASSACHUSETTS
INSTITUTE
OF
TECHNOLOGY
)28
1414
m~
Z
APR
35
1975Center
for
Information
Systems Research
MassachusettsInstituteofTechnology
Alfred P.Sloan SchoolofManagement
50 Memorial Drive
DESIGN OF A GENERAL HIERARCHICAL STORAGE SYSTEM
Stuart
E.Madnick
REPORT
CISR-6
SLOAN WP- 769-75
March
3,1975
*MR fflttrHT3
DESIGN OF A GENERAL HIERARCHICAL STORAGE SYSTEM
Stuart
E.Madnick
Center
for
Information Systems Research
Alfred
P.Sloan School of Management
Massachusetts Institute of Technology
Cambridge,
Massachusetts
02139
ABSTRACT
By
extending the concepts used in contemporary two-level hierarchical
storage
systems,
such as cache or paging systems,
it
ispossible to develop
an orderly
strategy for the design of large-scale automated hierarchical
storage systems.
Inthis
paper systems encompassing up to six levels of
storage
technology are studied.
Specific techniques,
such as page
splitting,
shadow storage,
direct transfer,
read through,
store behind,
and distributed
control,
are
discussed and are shown to provide considerable
advantages
for
increased systems performance and reliability.
DESIGN OF A GENERAL HIERARCHICAL STORAGE SYSTEM
StuartE.Madnick
Centerfor Information Systems Research
AlfredP. Sloan School of Management
Massachusetts Institute of Technology
Cambridge, Massachusetts 02139
INTRODUCTION and
The evolution of computer systems has been marked
byacontinually increasingdemand for faster, larger,
andmoreeconomicalstorage facilities. Clearly, if
wehadthe technologytoproduce ultra-fast
limitless-capacitystorage devicesfor miniscule cost, the
demand could be easily satisfied. Due tothecurrent
unavailability of suchawonderous device, the
requirements of high-performance yet low-cost are
bestaatisfied byamixture of technologies combining
expensive high-performance devices withinexpensive
lowar-performance devices. Suchastrategy is often
calleda hlernrchicalstorage system or multilevel
storagesystem.
CONTEMPORARY HIERARCHICAL STORAGE SYSTEMS Range of Storage Technologies
TableIindicatesthe range of performance and
costcharacteristics for typicalcurrent-day storage
technologies dividedinto6cost-performance levels.
Although this tableisonly a simplified summary,it
does illustratethe factthat thereexists aspectrum
of devicesthat spanover6 orders of magnitude
U00,000,000\) inboth cost and performance. Locality of Reference
Ifallreferences toonline storage were equally
likely, the use ofhierarchicalstorage systemswould
be ofmarginal valueatbest. Forexample, consider
ahierarchical system, M',consisting of two types of
devices.Mil) andM(2), with access times A (l)-.05xA(2)
andcosts C(D-20xC(2), respectively. If thetotal
storage capacityS*were equally divided between M(l)
and M(2), i.e., S(l)-S(2), then we can determine an
overall cost per byte,
C,
and effective access time.C
-.5xC(l)+ .5xC(2)C* -10.5 x C(2) - .5045x C(l)
A' - .5xAll) + .5 xA(2)
A* - .525xA(2) - 10.5 x A(l)
From these figures,wesee thattheeffective
system, M', costs about half as much as M(l) butis
more than 10 times as slow. On theotherhand, M*
is almosttwice as fast asM(2), butitcostsmore
than 10tirn^sasmuch per byte.
Fortunately, most actual programs and
applica-tions cluster their references so that, during any
interval of time, onlya small subset ofthe
infor-mation is actually used. Thisphenomenonisknown
aslocality ofreference. Ifwe couldkeep the
"current" information ina smallamount of M(l), we
could produce hierarchical storage systems with an effective access time close to M(l) but an overall cost per byte close to M(2).
The actual performance attainable by such
hier-archical storage systems isaddressed by theother
papers in this session12<14<2°. 23and thegeneral
literature2'3<4-6•7«8'10.11.13,15,18,19,21, 22. In
many actualsystems ithasbeenpossible to find
over 90% of all references inM(l) even though M(l)
wasmuchsmaller than M(2)13-l 5.
Automated Hierarchical Storage Systems
There are at leastthree ways in whichthe
locality of reference can be exploited in a
hier-archical storagesystem: static, manual, orautomatic.
Ifthepattern of reference isconstant and
predictable overa long period of time (e.g.,days,
weeks,ormonths), the information can be statically
allocated to specific storage devices so that the most frequently referenced information is assigned to
the highest performancedevices.
If the pattern ofreference isnotconstant but
ispredictable, theprogrammer can manually (i.e., by
explicit instructions in theprogram) causefrequently
referenced informationtobemoved onto high
perfor-mance devices while being used. Such manual control
places aheavy burden on the programmer to understand
the detailed behaviorof theapplication and to
determinethe optimum way to utilize the storage
hierarchy. This can be verydifficultif the
applica-tioniacomplex (e.g.,multiple access data base
•ystem) orisoperating ina multiprogramming
environ-nent with otherapplications.
Inan automated storage hierarchy, all aspects
ofthephysical information organization and
distribu-tion and movementofinformation are removed from
theprogrammer's responsibility. The algorithms that
managethe storagehierarchymay be implemented in
hardware, firmware, system software or some combination.
Contemporary Automated Hierarchical Storage Systems
To date, most implementations of automated
hierarchical storage systems have been large-scale
cache systems or paling systems. Typically, cache
systems,usinga combination of level1andlevel 2
storagedevicesmanaged by specialized hardware, have
been usedin large-scalehigh-performance computer
.4,10,23 storage
storagedevices managed mostly by system software with
limitedsupportfromspecialized hardware and/or
firmware*.11, 12.
Impact of HewTechnology
A* a result of new storage technologies,
especial-lyfor levels 3and6,as wellas substantially
reduced costsfor implementing the necessary hardware
control functions,nany new types of hierarchical
storagesystems haveevolved. Several of these
advances are discussed inthis session.
Bill Strecker23 explains how the cache system
concept can be extendedfor use inhigh-performance
minicomputer systems.
Bernard Greenberg and Steven Weber 12discuss the
design andperformance of a three-level paging system
usedin theMulticsOperating System (levels 2, 4, and
5 intheearlierHoneywell 645 implementation; levels
2, 3, and5 inthemore recent Honeywell 68/80
imple-mentation).
Suran Ohnigian-" analyzesthehandling of data
baseapplicationsina storage hierarchy.
Clay Johnson*'* explains howa new level6
tech-nology isbeingused inconjunction with level5
devices toformavery largecapacity hierarchical
Storagesystem, the IBM 3850MassStorage System.
Thevariousautomatedhierarchical storage systems
discussed in this session aredepictedinFigure1.
Cache
©
Main©
Block©
Backing©
Secondary©
Masso
t
©_
Q
z%
i s i2
c I S?
)©
i?
{645 68/80J r iO
i©
o
Figure 1Various Automated Hierarchical Storage Systems GENERAL HIERARCHICAL STORAGE SYSTEM All of the automated hierarchical stoarge systems
described thusfar have only dealt with two or three
levels of storage devices (the Honeywell68/80 Hultiea
system actually encompasses four levels since it
containsacache memory which ispartially controlled
by the system software). Furthermore,manyofthese
systems wereinitially conceived and designed several
years agowithout the benefit of ourcurrentknowledge
aboutmemory and processor capabilities and costs. In
thissection the structure ofageneralautomated
hierarchical storage systemisoutlined (seeFigure2)
.
Continuous and Corplete Hierarchy
Anautomatedstoragehierarchy must consist of a
continuous and complete hierarchy that encompasses the
fullrange of storage levels. Otherwise, theuser
would beforced to rely on manual or semi-automatic
storage management techniques to deal with the storage
levelsthat are not automatically managed.
PageSplitting and Shadow Storage
Theaveragetime, Tm, required to move apage,a
unit of information,between two levels of the
hier-archyconsists of the sum of (1) the average access
time,T, and (2) thetransfer time,which is the
product of the transfer rate,R, andthesize ofa
Level 0. Processor francfez kilt 5. Secondary figure2 GeneralAutomated
Hierarchical Storage Systea
Ocice
cfFaceS:ze. By exa:tative devices indicated in T^cle
tinesvar;. audi-ore than transfer rates. Asaresult,
Taisvery sensitive to the transfer unit size, S, for
devices with s-sll values of T [e.g.. levels 1and 2).
Thus, for these devicessi-allpage sizessuch as N=16
or32bytes are typically used. Conversely, for
devices with large values forT, themarginal cost of
increasing thepacesize is quite ssaall, especially in
view of the benefits possible due to locality of
reference. Thus,page sizes such as N-4D96 bytes are
typicalfor levels ;a-d5. "uch larger units of
informationtransfer are used for level 6devices.
Since themarginal increase in Ta decreases none—
tonically asa function of storage level, ther.-ier cf
bytestransferred between levels should ^-crease
correspondingly. Inorder to simplify the
implementa-tion ofthe systea and tobeconsistentwith the
normal mappingsfroraprocessor address references to
page addresses, itisdesirable thatall:a;esices be
apower cftwo. 7-.echoice foreach pagesize depends
upon the characteristics of theprogramstoberunand
the effectiveness of the overall stcrace system.
Pre-liminary measurements indicate thata ratio ofu.:1 cr
8:1between levels is reasonable. Meade:?has reported
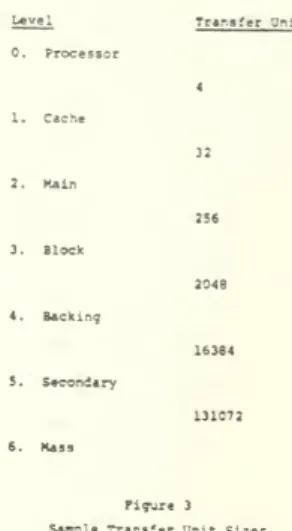
inilarfindings. Figure 3 indicates possible transfer
unit sizes between the6 levels presented inTable I.
The particular choice of size will, of course, depend upon the particulars of the devices.
Figure3
Saaple Transfer Unit Sizes
PageSol
—
tiro, sowletus cc-.siderthe art.ilmovement of
:::->t.:-
i- the stcrace -lerarr-v. Attime : the processor generatesa refere-re to*
logicaladdress a. kssone that the corresponding
Information _s not currently stored i- - . :.-
-but -s found in M<3!. For simplicity, assume that
pace sizesare doubled as-- :r iota the ttierarcbj
(i.e.,N(2.3)-2xN(1.2). S(3,4)-2x.N(2,3)-4xS(1,2).etc.
,
see Figure•). The zzzecf sizeB12.3 containing
ais copied from M(3) to M(2). n(2) now ro-ta.-s the
reeded ir.form-aticr., sowerep-eat theprocess. Ota
page of size
U.2]
containing a .scopied froe M(2)toM(l). sow, finally,th.e pagecf sizeN(0,1)
containinga iscopied free - l and fcrwaroedtothe
processor. In t-eprocess thepage cf Information is
splitrepeatedly as it moves up the biexaa
ic:
i.r
--resultof the splitting
t--3t is reoe..-: b]
5fta s - 5d o .
consisting of itself
Indinall the
process, the page
theprocessor -is
and itsadjacent t
praa rappl
localityofreference.-a-, of t--- . igeswill
be refer- ;fter--ardand oe
owed
fartherbv i- the hierarchy also.
:--p
:i-rof Fares. I- t-estrateov presented.
capesareart-allycopied as theymove up the hierarchy]
a pageatlevel i -as ore copyof itself ;- ear- |
-levels]> i. :r *read' rep-.ests
' " wite- requests tor-est applications
• - rams t.-.e
thus
.fa
pagehasnot been :-i-:e: and -s selectedto oeremoved
Level to a Lower ivel, it reednot o-e
act. all- tu-i-sferredsince avalidcopyalready exists
in the lowerlevel. Theoo-ter.ts cf any level of t--e
hierarchyis always asucset of t_-.einformation
TT.
I IN(0,1)I
•N(2,3)V////////^///////A
-i I N(3,4)1"
T
Page Splitting and Shadow Storage
Direct Transfer
In thedescriptionsaboveit isimplied that
information isdirectlytransferred between adjacent
levels. Bycomparison, most presentmultiplelevel
storagesystems are based upon an indirect transfer
(e.g., theMultics PageMultilevelsystem1^). in an
indirect transfersystem,all information is routed
through level 1or level2. Forexample, tomovea
page fromlevel n-1to leveln, thepage ismovedfrom
leveln-1 tolevel 1andthen fromlevel 1to leveln.
Clearly, anindirectapproachisundesirable
since itrequires extra pagemovementand its
associ-atedoverhead as well as consuminga portion of the
limited M(l) capacity in the process. In thepast
such indirect schemes were necessary since all
inter-connections were radial from themain memoryor
pro-cessorto thestoragedevices. Thus, alltransfers
hadtoberoutedthrough the central element.
Further-more, duetothedifferences intransfer rate between
devices, especiallyelectro-mechanicaldevices that
must operate at a fixedtransfer rate, direct transfer
was not possible.
Based upon current technology, these problems can
besolved. Many of the newer storage devices are
non-electromechanical (i.e., strictlyelectrical). In
these cases thetransfer rates can be synchronized to
allow direct transfer. Forelectromechanicaldevices.
directtransfer ispossible iftransferrates are
similar ora small scratchpadbuffer, such as low-cost
semiconductorshift registers, are usedtoenable
synchronization between the devices. Direct transfer
isprovided between the level 6 and level 5storage
devices in the IBM 3850 Mass Storage System14
.
Read Through
Apossible implementation of the page splitting
strategy could be accomplished by transferring
infor-mation from leveli to theprocessor (level0) ina
series of sequential steps: (1) transfer page of size
N(i-l,i) fromlevelito leveli-1, andthen (2)
extract theappropriate page subset of size N(i-2, i-1)
and transfer it from level l-l to level i-2, etc.
Undersuchascheme, atransferfromlevel itothe
processor would consist ofa series ofisteps. This
would result inaconsiderable delay, especially for
certain devices that require a large delay for
reading-recently written information (e.g., rotationaldelay
toreposition electromechanical devices).
The inefficiencies of the sequential transfers can be avoided by having the Information read through
toall the upper levels simultaneously. For example,
assume the processor references logical address a which
iscurrently stored at level i (andall lowerlevels,
ofcourse). The controller for M(i) outputs the
N(i-l,i) bytesthat contain a onto the data buses
along with their corresponding addresses. The
con-troller for M(i-l) willaccept all of these N(i-l,i)
bytes and store them inM(i-l). At thesame time,
thecontroller for M(i-2) willextract the particular
N(i-2, i-1) bytes thatitwants and storethemin
M(i-2). Inalikemanner, all ofthe controllers can
simultaneously extract the portion that is needed.
Using thismechanism, theprocessor (level0)extracts
theN(0,1) bytesthat itneeds without any further
delays
—
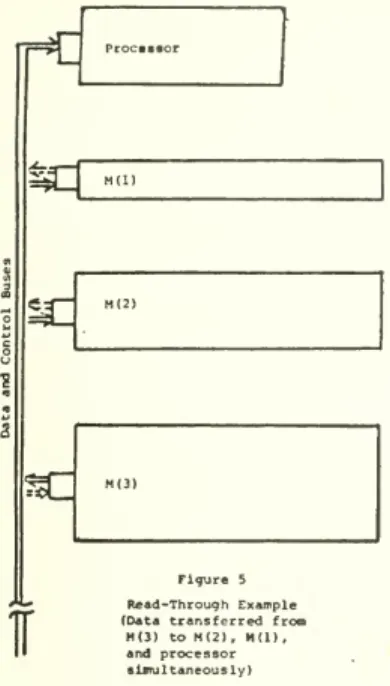
thusthe information from level iisreadthrough to the processor without any delays. This
processis illustrated inFigure 5.
The read through mechanism also offers some
important reliability, availability, andserviceability
advantages. Since allstorage levels communicate
anonymously over thedata buses, if astorage level
must be removed from thesystem, there are nochanges
needed. In thiscase, the information is "read
through"thislevel as if itdidn't exist. Nochanges
are needed toany of theother storage levels or the
storagemanagement algorithms although we would expect
theperformance to decrease asa result of themissing
storagelevel. This reliabilitystrategyisemployed
inmostcurrent-day cache memorysystems^.
Store Behind
Under steady-state operation, we would expect all
the levels of the storage hierarchy to be full (with
theexception of the lowest level, L). Thus, whenever
a pageis to bemoved intoa level, it isnecessary
toremove a current page. If thepage selectedfor
removalhas not been changed by means ofaprocessor
write, thenew page can beimmediately stored into
the levelsincea copy of the page to be removed
already exists inthe nextlower level ofthe
hier-archy. But, if theprocessorperforms a write
opera-tion,all levelsthat containa copy of the
informa-tion beingmodified must be updated. This can be
accomplished ineither of at least three basic ways:
(1) storethrough, (2) store replacement, or (3)
rr€
processorFigure 5
Read-Through Example
(Datatransferred from
M(3) to M(2), M(l),
andprocessor
simultaneously)
StoreThrough. Undera store through strategy,
alllevels are updated simultaneously. This is the
logical inverse of theread through strategy but it
hasacrucial distinction. The store through is
limited by the SDeed of the lowest level, L, ofthe
hierarchy, whereas the readthrough islimited by the
speed ofthe highestlevelcontainingthedesired
information. Storethrough isefficientonlyif the
accesstime oflevel Lis comparableto theaccess
time of level1, such as ina two-level cache system
(e.g., itisused inthe IBMSystem/370Models 158
and 168).
.torereplacement
StoreReplacement. Under
strategy, the processor only updates M(l)andmarks
thepage as "changed." If suchachanged page is
later selected for removalfrom M(l), it isthenmoved
tothenext lowerlevel, fl(2), immediately prior to
being replaced. Thisprocessoccurs at every level
and, eventually, level L willbeupdated but only
after thepage hasbeen selectedfor removal from all
the higherlevels. Duetotheextradelays caused by
updating changed pages before replacement, the
tffective access tinefor reads is increased. Various
versions of store replacement are used inmost
two-levelpaging systems since itofferssubstantially
Betterperformance than store through for slow storage
levices (e.g., disks and drums).
StoreBehind. In bothstrategies above, the
storagesystem was required toperform the update
operation at some specifictime, either atthe timeof
write or replacement. Oncethe information has been
storedinto M(l), theprocessor doesn'treally care
how or when the other copies are updated. Store
behindtakes advantage of this degree of freedom.
The maximum transfer capability betweenlevelsis
rarelymaintained since,at anyinstantof time,a
storage levelmay not have anyoutstanding requests
for service oritmay be waiting for proper
position-ingtoservicea pending request. During these
"idle-periods,data can betransferreddown to the next
lower levelofthe storage hierarchywithoutadding
anysignificant delays to the read or storeoperations.
Since these"idle"periods areusually quitefrequent
under normal operation, therecan beacontinual flow
ofchangedinformationdown through the storage
hier-archy.
Avariation of this store behind strategy i3 used
in the MulticsPageMultilevel system12whereby a .
certainnumber of pages at each level are kept
avail-ableforimmediate replacement. Ifthe number of
replaceable pages dropsbelow the threshold, changed"
pages are selected to beupdated tothenextlower
level. Theactualwriting of these pagestothe lower
levelisscheduled totakeplace when thereisno
real requestto bedone.
The store behindstrategy can also be used to
provide high reliability inthestorage system.
Ordinarily, achanged pageis not purgedfroma level
untilthenext lower level acknowledges that the
corresponding page has been updated. Wecanextend
thisapproach to require two levels ofacknowledgement.
Forexample, achanged page isnotremoved from M(l)
until thecorresponding pages inboth M(2) and M(3)
have been updated. Inthis way, there will be at
leasttwocopies of each changed piece of information
at levels M(i) and M(i*l) inthehierarchy. Ifany
level malfunctions or must be serviced, itcan be
removedfrom the hierarchy without causing any
infor-mation to be lost. There are twoexceptions to this
process, levels M(l) andM(L). Tocompletely
safe-guard thereliability of the system, it may be
necessary to store duplicate copies ofinformation at
theselevels. Figure6illustrates this process.
DistributedControl
There isa substantialamount of work required
tomanage thestorage hierarchy. Itisdesirable to
remove asmuch as possible of the storage management
from the concern of theprocessor. In the
hier-archicalstorage system described inthis paper, all
ofthemanagement algorithms can be operated based
uponinformationthatis local toa level or, at most,
inconjunction with information from neighboring
levels. Thus, it ispossibleto distributecontrol
ofthe hierarchyinto the levels, thisalso
facili-tatesparallel and asychronous operation in the
hierarchy (e.g., the storebehind algorithm).
Theindependent control facilitiesforeach
level can be accomplished by extending the
function-ality ofconventional device controllers. Most
current-day sophisticated device controllers are
actually microprogrammed processors capable of
per-forming the storage management function. TheIBM
REFERENCES
1. Ahearn, G. R., Y.Dishon, and R.N. Snively,
"Design Innovations of the IBM 3830 and 2835
StorageControl Units,"IBM Journal of Research
andDevelopment,Vol. 16,No. 1, pp. 11-18,
January, 1972.
2. Anacker, W. andC. P. Wong, "Performance
Evaluation ofComputer Systems with Memory
Hier-archies," IEEE-TC, Vol. EC-16, No. 6, pp. 765-773,
December1967.
3. Arora,S. R.andA. Gallo, "OptimalSizing,
Loading andRe-loading in aMulti-level Memory
Hierarchy System," SJCC,Vol. 38, pp. 337-344,
1971.
4. Bell, GordenC. andDavid Casasent,
"Implementa-tion of aBufferMemory inMinicomputers,"
ComputerDesign, pp. 83-89, November 1971.
5. Benaoussan,A., C. T. Clingen,andR. C.Daley,
"The MulticsVirtual Memory," Second ACM Symposium
onOperating Systems Principles, Princeton
University, pp. 30-42, October 1969.
6. Brawn,B. S.,and F.G. Gustavson, "Program
Behavior ina Paging Environment," FJCC,Vol. 33,
Pt. 11,pp. 1019-1032, 1968.
7. Chu,W. W., andH.Opderbeck, "Performance of
Replacement Algorithms withDifferentPage Sizes,"
Computer,Vol. 7, No. 11, pp. 14-21,November 1974.
17. Madnick, S. E.,andJ. J.Donovan,Operating
Systems,McGraw-Hill, New York,1974.
18. Mattson, R., et al., "Evaluation Techniques for
Storage Hierarchies," IBMSystems Journal, Vol.9
No. 2, pp. 78-117,1970.
19. Meade,R. M., "OnMemory System Design," FJCC,
Vol.37, pp. 33-44, 1970.
20. Ohnigian, Suran, "RandomFile Processingina
Storage Hierarchy,"IEEEINTERCON, 1975.
21. Ramamoorthy,C. V. andK. M.Chandy,
"Optimiza-tion ofMemory Hierarchies inMultiprogrammed
Systems," JACM,Vol.17, No. 3, pp. 426-445,
July 1970.
22. Spirn,J. R.,andP. J.Denning, "Experiments
with Program Locality," FJCC, Vol.41, Pt. 1,
pp. 611-621. 1972.
23. Strecker, William, "CacheMemoriesfor
Mini-computer Systems," IEEEINTERCON, 1975.
24. Wilkes,M. v., "Slave MemoriesandDynamic
StorageAllocation." IEEE-TC,Vol. EC-14,
No. 2,pp. 270-271,April 1965.
25. Withlngton,F. G., "Beyond 1984i ATechnology
Forecast," Datamation, Vol.21, No. 1,pp. 54-73,
January 1975.
8. Coffman, E.B., Jr., andL.C. Varian, "Further
Experimental Data on the Behavior of Programs in
•PagingEnvironment," CACM, Vol. 11, No. 7,
pp. 471-474, July1968.
9. Considine, J. P., andA. H.Weis. "Establishment
and Maintenance ofa StorageHierarchyfor an
On-line Data Ba3e under TSS/360," FJCC, Vol. 35,
pp. 433-440, 1969.
10. Conti, C.J., "Concepts forBuffer Storage,"
IEEEComputerGroupNews, pp. 6-13,March1969.
11. Denning, P. J., "VirtualMemory,"ACMComputing
Surveys,Vol. 2,No. 3, pp. 153-190, September
1970.
12. Greenberg, Bernard S.,andStevenH. Webber,
"MulticsMultilevel Paging Hierarchy," IEEE
INTCRCON, 1975.
13. -Hatfield, D.J., "Experiments on Page Size,
Program AccessPatterns, and VirtualMemory
Performance," IBM Journal of Research and
Development,Vol. 16, No. 1, pp. 58-66,January
1972.
Johnson, Clay,
IEEEINTERCON,
'IBM 3850
—
MassStorage System,L975.
Madnick, S. E., "StorageHierarchySystems,
MITProject MAC Report TR-105,Cambridge,
Massachusetts, 1973.
16. Madnick, S. E., "INFOPLEX
—
HierarchicalDecom-position ofaLargeInformationManagement System