Combining Pixel and Depth Information in Image-Based Visual Servoing
Texte intégral
Figure
Documents relatifs
We traced back the storm up to 5 December 2003 and demonstrated that tropical storm Odette, active from 4 to 7 December 2003 in the Caribbean, injected large amount of water vapour
The AUTOFocus mode is a semi-automatic closed loop process as it needs the surgeon’s supervision to correctly converge to- ward the target in three steps: at each iteration the
As already noted above, SE response reflects the primary electrons absorption rate, which is itself proportional to the force exerted by the electron beam.. As a consequence,
Furthermore, as shown by Exam- ple 1, in order to determine this differential Hilbert function it may be necessary to compute derivatives of the original equations up to order ν,
This section presents the on-line walking motion generator proposed in [12], [13]. The robot is modelled as a linear inverse pendulum which fits fairly well with the HRP- 2
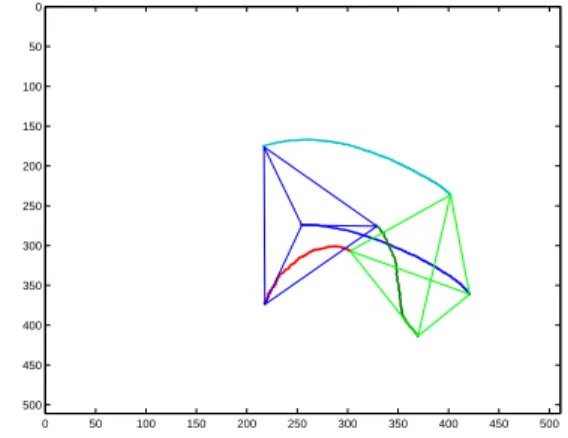
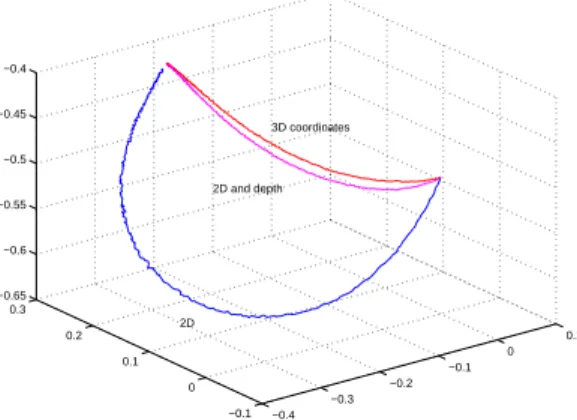
Visual servoing based on the tracking of points of interest: (a) initial image, (b) final image, (c-d) classical visual servoing control law (difference image and point trajectory
Unité de recherche INRIA Rennes, Irisa, Campus universitaire de Beaulieu, 35042 RENNES Cedex Unité de recherche INRIA Rhône-Alpes, 655, avenue de l’Europe, 38330 MONTBONNOT ST
Unité de recherche INRIA Rennes, Irisa, Campus universitaire de Beaulieu, 35042 RENNES Cedex Unité de recherche INRIA Rhône-Alpes, 655, avenue de l’Europe, 38330 MONTBONNOT ST
