que aon
erpéri'ence,
ses
contributions,
d.isponibilité
et sa
compréhcttsinn ont
conception dc
ce trauail.
I{ous d'euons
remercier
tout
d'abord,
ALI'AE,
le tout
puissant, qui
nnus
a donné
la
puissance,
la tolonté
et la
patience
pour
élaborer
cetr'zuail.
Nous
adressons
tout
d'abord nos
rernerciements
les
plu's
sincères,
à
Mme
BOTIATMANE
Sabrina,
qui a
très
uolnhtairement
accepté
d"être
le
prornoteur d,e
ce
mémoire- Sa
grandz
connaissance
dans le
do'maine,
ainsi
ses
ori,entations
précieuses, so
la
joué
un
rôle
imprtdnt
dnns
Plus
près
de
nous,
nous
souhaitons remercier les prolèsseurs
DIB
Samira
et
MARDJANA Hosina
et
MERABET
Souad'
pour
leur
soutien
et
Ieur
encouragement-
Vous
avez
toujours cru
en nos capacit'és'
I'Iou^s
uous en
remerci.ons
infiniment
SEIIIRA
Sarnira, uous
nnus
auez
beaucoup
aidi'
Vous
étiez
tà
à
chaque m'omm.t
inportant et
nous
uous
en
remetcinns'
Votre
hospitdlité
n'a d'égale que
uotre
gmtillesse.
Nous
e*primons taus
nos
sincères
remercienLents
pour
les
membres
de
jury Eti
ont accepté
d"exantiner
et d"éualuer
ce tratsail,
nous
remercions
ainsi
tous nns
enseignants
d'ed,épartement électronique
Nous ad.ressons
nos
uifs remerciements
à
tous
ceux
qui
nou's
ont
aidé
et
supporté
d.eprêt
ou
d'eloin
d,urant
l'élnboration
dc
cetr<tuail.
Enfin,
c'est auec
une certaine
énrotion que
nous nous
adressons
à
nos
parents ainsi
quà
mes gro.nd's'parents,
sans
lesquels
nous
ne
serons pas
arriués
jusque-Ià.
Votre
prsêuérance
et
uos sacrifices
dutant
toutes
cesannéas
seconcrétisent
aujourd'hui par
cenouuel accomplissemen't' Nous
uons
aimons
de tous
rùos
crBurs,
ainsi
que nos
ftères
et
nos sæurs
que
nous
Dédicace
1,2.
3.
À mon
père
À
ma mère
!
À ma
pait
s@r
RJ,mrqui a
touioun
côt6.
4.
À
tous
mes chEs
frères
a
sæurs,
ainsi
enfants
I
ti:t"l'!,
:t::',,
Ashraf,Ilad.
5.
À mes
deux
g\andes
familles,
patenellc-6.
À
ma
granil-fère
!
7.
À
mon ami
)VlPhammed
avant
qu'il
collègue,
il
e4
un
frùe.
8.
À
mn
chbe
Hadjer
a
à
ma
9. A
notre
MmeBOUATMAN.
10.À mæ amis
q{i
n'ont
cessé alem'aîdeî
m' encouruge\
enpar'oÎcalier I
btissem,
mes
11.À næ
ptofs
72.À
tous ceux
force
de
con
pat
un
mot"
m'ont
e...,
cf'è'
ili
eleurs
binôme
et
l",lora
Ssbina
tcetà
Dédicace
1.
Je
dédie ce m
à
la mémoire
2
À mes
chbes
cousines"
3.
À
ma
deux
g
paternellc.
4. À
tous
mespt
classe.
s.
ÀBoaDJAÇ
collègue
4 pl"
6.
À noûeprom
7.
À
tous nos
pr
8.
Enfrn
àtous,
Algéric
meillt
/v1
deste
travail à
ma
chÙe
Ie
mon
papo-sæuts,
mes
chets
cousins
'und6
famillc;,
maternel
oches, mes
amis,
mes
col
UI
Chenseddine,
mon
bi
s
que sa
un cher
amL
teur
Mme
BOUATMAN
fs
de
la spécialité.
:eux
qui
ûavailknt
pour
ufe.
'olta^r.d
naman eî
et
eet
ègues de
tôme
mon
ESahrtnu
ne
..)
Page | |sommatre
Introduction
générsle'...'....
I.1. Introducton...
I.2.2.
Définition 2..
I.2.3. Fâmilles
de textures...'
...','.'.'...'. 4
L2.
Définitions
dela
texture...,..
I.2.1.
Définition
1.,...,...'.
...5
... 5 ... E ....,... 10I.2.4. Propriétés
deperception
texmres...
I.3. Métbodes
d'extrrction
de
I.3.
l.
Attributs
géométriques
rrctéristiqu€s
detexturcs
I.3.2.
Attributs
spatio-fréquenti
I.3.2.1.
Dans ledomaine
I.3.2.2.
Dans ledomaine
I.3.2.3.
Dans ledomaine
o-Êéquentiel
L3.3.
Attributs
statrstiques...'...
I.3.3.L Athibuts
statistiques
I.3.3.2.
Attributs
statistiques
prernier ordre
secondordre
L3.4. Matrices
de ...,,...4
...'.,....''..'.'.'...'....
4 11 ...,...,... tI
1l
l1
12---'---""""'
121''
13 15 ...,,... 16I.2.3.1. Macro
textures .... -...I.2.3.2.
Micro
textures...
6
7
I.3.4.1 .
Attributs
d'Haralick
its desmatrices
deL3.5.
Athibuts
basés surla
onspatiale...'...'.'...'.
I.3.5.1.
Les modèles deMARKOV
13.5.2. Méthode
desmotifs binaires
(LBP)
l6
16m.1.
Introduction...,...
III.2. PrésentNtion
dela
brse de données...,...-.
IIL3.
Implémentation
ct
---'----"""35
---'----"""35
...
35
IIL4.
Résultab
et discussions
.Itr.4.1.
La validation
simDle ..IIL4.2.La
validation croisée..
IIL4.3.
Discussion
.IIL5. Conclusion
..Conclusion générale
---..
Bibuogrâphie..."...'...
I.iste d$i
fisures
Liste
des
hgures
Figure
Ll.
Exemples
detextures répétitives
prises de la ba.se detexture
VlliTBx
[4].
Figure
I.2. Exemple
defamilles
detextures
:[a-d] textures déterministes, -c-hl
textures obssrvables,
[i-l]
textures
stochastiques...
...6
Figure
L3. Exemples
de macro 1€xtures....
. . . . . . . . . . . . . . . . .'7Figure
I.4. Exemples
demicro
textues
...7
FigureL5.Exemplesdesablesâ2résolutionsdifférentes...8
Figure I.6.
Infonnation
surune lexture
selonplusieurs
régionalittis...
...9
!'igure
I.7.
Représentationd'ufl) lexture
selonplusieurs résolutions
....
.
...
.
..
10Figure
I.8.
Lesdifférentes
class,;sd'attributs
detexture...
..... 1I
tsigure I.9.
Huit
pixels plus
prochesvoisins utilisés pour calculer
Iamatnce
de cooccurrence. Lesplus proches'roisins
de'x'
selon ladirection
0 =0o sont lespixels
I
et 5,pour
0=45'Ies
pixels 4
et {1,pour
0=90'
lespixels
3 et7
etenfln poùr'0
=135'
lespixels 2
et6.
...14
Figure
I.10. Construction
d'un rnotifbinaire
etcalcul
ducode
LBP...
...18
l'igureI.11.Représentationdupixelcentalg"etdesonvoisinagego...
...
18Figure
I.12. Exemples
d€Construction
etuniformité
d'un motifl-BP,..
....
....
.. ...l9
Figure
I.13. Liste
des 36uniques motifs binaires locaux invariant
enrotatjon
possibles pour LBP6. p'i".Les
points noirs
et blancscorrespondent lespectivement
auxvaleurs
debit0etIdanslasortiesur8bitsdel'opérateurROR(.),source[29]...20
Figure
ll.l.
Schtima deprincipe d'un
système declassification...
..
...
.
....23
Figure
II.2.
Classificâtion
des qr'pes de laclassification
[31]
....23
Figure
II.3,
La classification
supervisée
...25
Figure
II.4.
Illustration
de la margemaximale
€t les vecteurs supportsqui
lrontlui
associés....
. ...
...26
Fisure II.5.
Illustration
de lamrlthode
des Èplus
prochesvoisins (&-NN)
avec É=
5..29
Figur€
II.6.
Prinqipe
de lavalidatipn
croiséepour
rn=
10...
....
. .. .....
....
...31
Figurc IL7.
Décision
d'un
classifipur
binaire
enfonction
duseuil
dedissiminatron
s :la
courbe
bleue représente laprob4bilité
aposteriori
de la classe( négative
)
etla
courberouge
représente taprobabilité
aposteriori
de la classe <positive
>. .... ... ...32
Figure
IL8.
Courbes ROC
:
à
garirche, lescourbes
A,
B, C
et
D
sont respechvement
associeesà
desclassifieurs de
perfiormances croissantes.A droite, les courbes
A et
B
ont
la même
airo
(AUC)
et
la niême Yaleur
EER
et sont pourtant
associéesà
desclassifieurs qui
n'ont
pas lesmêm{s
qualités...
...
' ..
33Figure
III.1.
Echantillions d'imagP
detexture
de la baseUIUCTex[49].
...
,'
.'Figure
IIL2. Exemple d'applicati$n du
codeLBP
sur une image de la base dedonnées.
...
... ... .. .....
-
37
'l'"ll
l*1 "lllii":::
::
'"" l*
::: '-:::
':
:*
"l
l'iil
l"*1"1"
101,
,
Fignre
IIL4.
Schéma général dutfavail
effectué...
.... ... ... ...
39
Figur€
IIL5.
Représentation des iinages de classe :Bark2' Bark3, Granite,
]Fur,36
Tâblcâu
II.l.
Matrice
deconfusi
Trbleau
III.7. Matrice
deTâblea[ III.8.
Matrice de
Tableau
III.9.
Matrice de
la
validation simple.
... ....
...40
cité (%) poul
lalalidation
simple...41
lavalidation
croisée...-...42
Tableau
III.1.
Taux
d'erreur
(%)
Tableau
III.2.
La sensibilité
etla
Tableau
III.3. Taux
d'erreur
(%)
Tableau
III.4.
La sensibilité
etla
Tâbl€au
IILS.
Taux
d'eneur (%)
Tableau
III.6. Taux
d'eneur (%)
ité
(%o)pour la
ralidation
croisée...42
différentes
classespour
lavalidation croisée...44
différentes
classespour
lavalidation simple. -.46
potrr LBP
simple....
...47
pour LBP
uniforme...
... ... ......
......-48
pour LBP invariant
pârrotation...
... ....-- .-...49
Tableau
IIL10.
Matrice de
oour LBP uniforme
etinvariant
parrotation
50
Le problàme que cherche à résoudre la reconnaissance des formes est d,associÊr ùn€ etrquette
à
une donnéequi
peut sp présenter sousforme
d'uneifiage
ou
d,ur
signal. Lareconnaissance de forme (RF) est uq thème pârticulièrement vaste et pluridisciplinaire qui
fait
objet
de nombl(jùx travaùxde
reçherche.La notion
de modélisâtiond'un
componemenrintelligeût est soùvent soùs-ertendue dans un problème RF et donne unr: idée de la dif,6culé de
la tâche.
Des méthodes gfuéral€s ont été développé en recomaissance des
fomes
lour
extrâire automatiquemenl des informations des données sensiblcsafin
de caraçtédsor les classes de forme (apprertissage) et d'assigngr automatiquement les données à ses olasses (reconnaissance ou classification).Utr systènre de reconûaissatrçe de fomte peut êhe résumé en deux phases principal€s :
I'extaotion
de caractéristiques et la çlassification.L'extraction
de
caractéristiques oonsisteen
d€s trarsfomatioûs naiématiques
calculéessur les pixels
d'une irnage numérique.Les
caractéristiqu€s visuelles pennettent géréralemeût de rdeux reldre comptp de cqtaines propriétés visuelles drl l'image, udli sees pourdes haitements ultérieus enlrart daqs le cadre d'applications telles que la détection d,objets ou la rccherche d'images par le contenu,
La classiilalion,
se réfèrc a\r class€ment ou groupemeû d'éléments de donoées dans des ensemblessirnilaires.
L'étape d'€xtraotion de caractéristiques (attributs) réchlit dcûc l€sdotnées
çn
mesurant certrajnes prqpdétésou
camctâistiques des images étiqùetées. Cesattributs sont ensuite
tansmis
àun
classifieurqui
évalue çes caractéristiques et preûdure
décision relative a la classe de chaqup image.
Oû
s'intéressedars
notregavail à
la
corceptior et l'évaluation d'un
rtystème de classificalion autcmatique des imageg texturées.L'objectif
visé dans notre caÊ parla
classification est de pouvoir distinguer entre les classes d'images correspondantgs aux différentes texturçs.L'analyse des textures est
un
sûjet ârrcien de l'analyse d'imageet
dela vision
parordhateur. Les techriques existantes sont utilisees çlour identifier une texture $relconque ou
I
ntroduction
pénérûle
diviser
une image texhrlée en plusieurs regioûs coDpottant des caractéristiques identiques-Nous les retrouvolls dans plusieurs dpmaines d'application conme l'ânalyse d€ scènes et d€ vidéos, l'imagerie médioale, I'industrie etc.L'analyse (l'images te{turées a poùr bùt d'extraire des caractéristiques ou
:ttrihuts
detextue
afin dg classer les images. La classification des imâges est utili$ée dans de différents domahes tels que la reconnaissance dÈs emprointes, des Yisages, indexation, reooÛr zri$sarce&
nmeuls
erc....Dats
notle
oas,tous
avollschoisi I'openteur
dumotif
binairerlocal
(L'roal Binary Pattem) pour l'extraction des caractéristiques.L'idée
de cet opérateû est d'assigler à chaque pixel un code dépendant des niveaux de gris de son voisinage- Le niveau de gris du pixel centrald'un de bloc 3 x 3 est compar,i à celui de ses voisins suivant certaine équrrdon. Les pixels de ce
bloc sont seuillés l)ar sa
l"leur
de pixgl caûtal, rmrltiplié par des puissatrççs de deÙùi et ensuite additionné pour ot'tenir ù!r co,le pour le pix€l ceûtralCes codes ou lçurs stâtistiques, le
plus
souventthistogËmme,
sont ensuite utilisées coûrmevecteu
de caraotéristiques de l'image. La deuxième phæe qui est la classilication estefic.tuée par
la
rnéthodedu
k
pluÊ prochevoisin
KNN
ft
NearestNeighbc'r) Pour la
classificaton d'une nouvelle observatjon ou image x, l'idée fondatrice esl de faire voter les plusproches voisins do cette observatiotl. La classe de
x
est determinee en fonction de la class€ majoritaire pamri les k plus p:oches voisins de I'observation x.Pour évalù
r
les perfolmances de notle système, nous avons utilisé u'le baser rledotlées
qui contient 1000 images réelles reparties
su
25 classes de textur€s diflérentes (nli.rbre, bois, eau,verro'
....).
l,es images :tont prises à desoriettatiots
et des résolutionsdiffercttes
Nousavoûs
divisé la
base de données en groupe d'apprentissagegt
groupe detest
selon deuxplocéduÎes:
une'aiidalion
simple otute
validation croisée. Ces procéduÎcs structùre{rt lesitenhons
técessairesà
l'évaluatioû
des performancesdu
olassifieur.L'évaluatim de la
classificationest
.éalisée en termes detaux
d'erreùr global,le taux
d'erreurpilr
olasse'la
seNibilité.la
sDécificité et la matric€ deconftsion
I'extraction dÊs attributs spaliaux,
dès pix€ls voisitr$. Cette méthode
Daûs
l€
deuxième classification àvvoir
la médrodcqui
s'est
effe{tuépar
la
validatiBélhod€s utilisées Dow classifier I
textures cal€ulés à Dartir des
i
d'oxhactior
LBI'
et3
aùtres iBvariante Dar rotation et LBP unitaux
d'enew
des différentes méthDans
le
premier chapitre, nméthodes utili sée s pour I 'an:rlyse de
L'objçctil
dç notre travail sc datrs les chapitres$livads
:allons decrire
la notion
de textureet
les différentes Nous Drésentons la méthode LBP aui est base€ sùr chaque pixel reçoit un code binaire qui deperd des valcurss€It à classer les imases texturé€s.
nous
allons Fesetrterles
différentes approch€sde la
airsi
que | 'étape d'évaluation du taux de recoDnaissancesimple
et
Goiséeafin d'étudicr les
perforpances des images texturées et de les comparer.Datrs
le
aemier çhæiûe, s allons tester la méthode deKNN sw
lesattribu*
de de la base de données UIUCTeX en utilisant la méthode de celle-cià
savoir la méthodqLBP
ùûiform€,LBP
et invariante par .otation. Nous présenter4ûs aussi
les
utilisé€s.
cf{
I.l,Introd
ctir)n
L'amlyse
des textun:s estul
sujetancier
deI'amlyse
d'image et dela
vision pa:rordiûateur. Les ter)lDiqtres existantes soût utilisées poru
ide[tifier ure
textùre quglconque oudiviser une imag€
textuée
en plusieurs régions comportant descaractfistiques
identiqres. Nous les retrouvo rs dans plusieurs rlomainesd'applicaton
comme l'analyse d€ liçènes et de vidéos, I'imagerie médicale, I'irrdustrie etc. Les recherches en analyse de textures se divisent en trois grândes caLtégories : la classi6cation, permettant de teconraître une textùrc donlee, Lr segmedation ayant pour obja;tif
d'iolentrfier les différentes classes de textures dan:; une mêrne imageetla q'ntiàie
de texturcs qui peùt êt e égalemellt utilisée pour la compression d'images.Diffâeûts
t]!es
d'images cornprenant les images binaires, en niveaux cle gris et en couleur:i sont coûcernés par ces oùtils d'aûalyrie. Selon les données à traiter, les techniqùes d,'analyse detextures peuvent virrier.
I.2, Définitions
de
la
texlrre
Plusieurs définitions
dc la nction
de textureont
été présentéesau
coufl! desviagl
demieres a$rées. Oes défioitions
sott
raremetrl gérédqûes et porterfplulôt
sui un des aspects ou une des applicalriors de la notion ale texture.1.2.1.
Délinition
1Une texturi) est
ure nigion
def
ilirage, pour laquelle on peutdélinir
une feaêtre de dilùension midmale, telle qu'uûeobs)vatior
âù travers de celle-çi se hâduit par un€,perc€ptiosideotique
poru
toutesles
hâ:Nlatio|ls possiblesde
cette fenêtreà
I'intérieur de Ia
région considérée. Pour ùre texture,rl
existe torùours une telle fenêt1e quicone$ond
à la résolution de la texhue.A
la
fois
struoturéeet
aléltoire, une
textue
peut
êti€
déodte
spatialement ou sÎâtistiquem€d, et, d'ùne mafiùe gérénle,
on qualifiem une texture de fine où gossière, plusou
moins homogrirg
rugueus€,plùs
ou
moins régulière,
dense,linéaire, il;otrop€
oudi.ectionnelle, tachetée, rnarbrée, etc.
satisfaie
cette drifinition, ce quin'
possède plusieurs aspeots visuels
A@fuel
_
at4l$cg_wtgionjewsNtûtristiwqdetextuu
I.22.
Délinition
2La
texture estur
fircteur daasla
perceptioq do I'ellvironùtemenld
la
rpconnalssance ce sesobj€ti.
ent à la couleur, la texturç restedifficile
àdéfinir
de de définitions possibles ddnnées dans la littérature en manie,ie précise ot génédque. Letémoignent
F,2,31.
La définitionIi
ire de la texture estla
"rép1étitj on spatiale d,unmêûe
ffiEffififfii
Figurr
I.1. Exemples de textuleF repétitives pris€s de la bsse ddtexhre VISTIIX
I4t.L2.3. Familles
{letextures
Dans
la
litlérahf€,
il
est questionde
plusieursfonilles
de
t€)ilrEes rveorotarûnent
les ter.tu.es déteûûini leskxtùes
stoohastiques ea lqs textures obs,(rvables[j]
se caraoténseût par la répétiti gn d'un motif géométriqu e aùssi appelé
"text)n".
Ce geûre de peut dono facilement êttes)lthétisé
ii partird'ur
motif
si on connaît son orietrtation e1 taille.Au contraie, les textmes sort iregulières. Elleg obrissent à certaircs loirs
staùstques
et
petrveût ôtrebidimeasiomel.
llne
texturees
coûrne
une
réalisatio4
d'ul
champ
aleatoin:se decrit
commeùn
mqlar{ie entre
uûe texûrn) stochastique et utre t€xtur€&r eff€t,
àI'iûtéri€ui
de çe t),pe de te>(ures, oourthès similaires mais pas idedtiques.
motif
dansdiffireotes
dir':ctions corNid&ée insufiisante étant donnéhumain.
À tihe
d'exemple,la
régulier ou irrégrûier. Par consé
po|ll
diff&encier deux objets de(figure I.2). Les texhrles
I'espace". Ceperdaût,
cetfe
explicatiorL€st
parfois'elle est indépfldante du comporte.trent de l 'obs€f,vaûeni
d'un
tissuou d'un mur
d$ briqùes (figureLl)
peut pas toùjoursle
cas pour d'âutri}s textures. La tÈxurrescnmrûarts
à
savoir l'aspeol grossier,fiq
granuleux, I'homogenéité de la surface est le critèreii
considerer s diff&entes.ChutrsL
_
ArdlrsgÆrutianjfâtsuctér@rycbterrq
E!
général, on perLt classer la texturefar deux grandes familles :
)O,)O{
)o<)o(
)<)<}a(l
)O{}O(;
_-:::a:--*.r;a:
;;:{.::::.
:.i:-ri-;;
(i)
(il
(k)
0)
Fi$rr€ L2.
Exexrple defaûilles
d€ itextures : [a_d] textuesdétemùd$is,
[e_hl nertt{esobservablell [i_l] tcxtwes stochastiques.
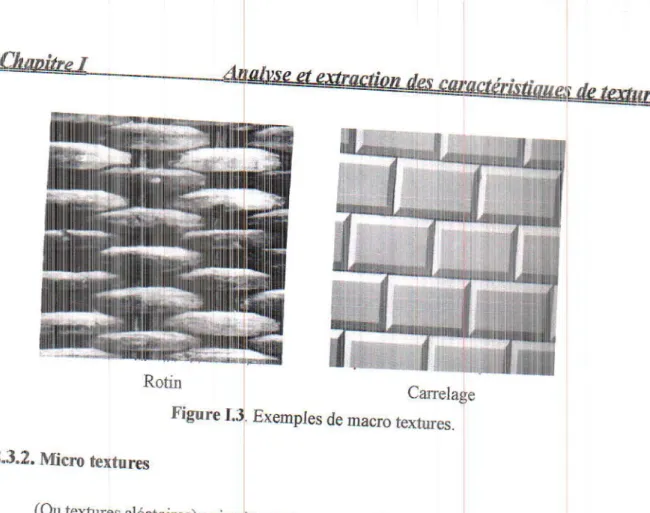
L23.1. Mâcro
texaur€s
(Ou
textues
sûuctuées) pour ld;quellesil
est faciled'extrùe visudl€mqt
lÊmotif
debase et les lois d'asscmblage des primitives enbe elles. Ces textures pouvent même Dres€ntent
une c€ftaine périodicité ou
cyclo
stâtiqrnarité (processus aléatoire plaqué surrn
prooessus périodique). Cerlaits exemples !io[t replésentatifs dÊ ce type de t€xtures, colnrne iate]iure d,ùn
mù
de brique, de cerlains tissus ou d,u4 grillage [6].IÏ
(ou
textures aléatoires) qui pr:Ésententun aspect prùs chaotique. Et prus désoi€anisé,
::^":^a::_ll'-tt:rî"n
visueite resre qtobarement homosère. Les différertÈs résions d,unc rmage aénenne, les bois, Ies champs, qtc., représentent des textues microscopiqies171.
Rotin
CarelageFigure 1..r. Ex€mples de macro textures.
L2.3.2, Micm
texrurs
Trcsse
Figure L4. ll'(emples de miclo textules.
Mais,
il
est parfoisdifficile
de ofasser une texhÙe dansl,l]rls
ou l.auhe des caËgories(texhfês mixtes)
d'aut4ût queia
résollton
de l,image poseun
problèmesupplémentaùe, comm€ en témoig'e la
fig're(
L5) ou du sable est photogaphiéà 2 résoiutiors dirîérentes i ra
prernrere image laisso à penser que le
si4rte est uûe micro texture, la seoordq
qull
€stplut&
ulre macro textule. J
\
nLheiæ,J-_
éenù]tt-dsrrlcaianfuÂtslgélistfutadewc
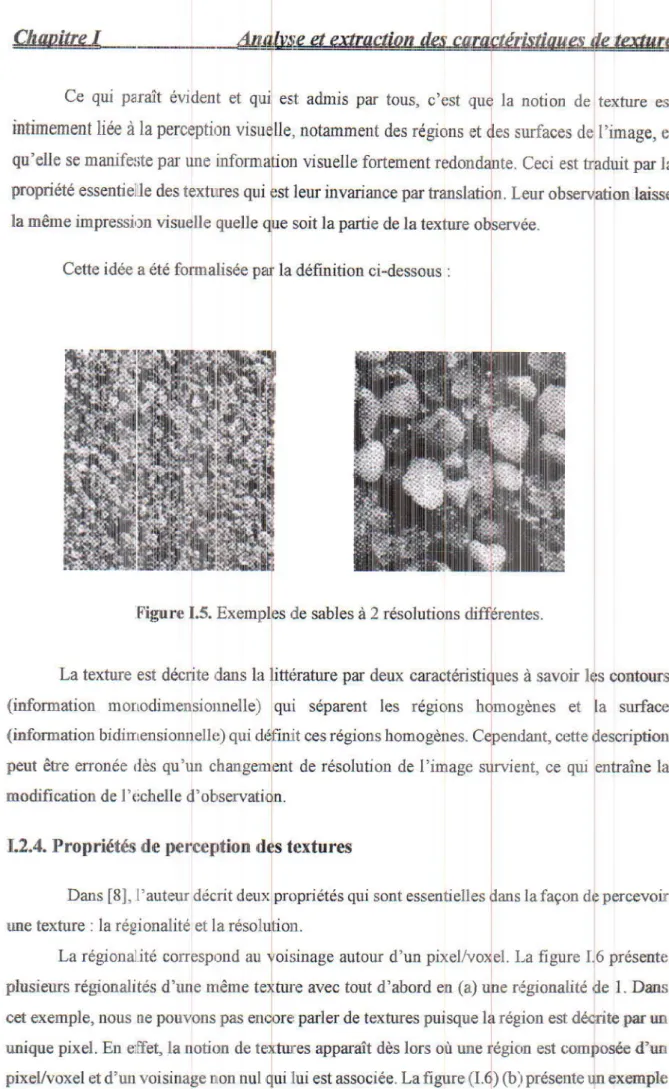
Ce
qui
p€raît évidentet qui
est admispar
tous, o,est quela
notion
de textureett
intimemellt liee à lâ perception visuqlle, notamment des régons et des surfaces de I'image, ct qu'€llo se manilèt;te par uneiaformi4io|
visuelle fofternent redondante. Ceci estlnduit
par la Fopriété €ssettieile des textLfies qui pst leur invariance par hanslation.lzur
observation laisse la même impressi rn visuelle quelle qlue soit la partie de la texture observée.Cett€ idée a été formalisé€ p€q la définition cidessous :
Figure 1.5. Exemplils de sables à 2 résolùtions différentes.
La texture est decrite ilans la
littéraiue
par deux caractéristiques à savoir lles contou$(iûfonnation
rnorLodim€nsioirnelle)qui
séparentles
régions
homogèneset
la
sùrfacl:(idormation
bidirLensionneliO qùi dr4linit ces iégions homogènes. Cependant, cett€ descdptioû peut être eûonée rlès qu'un changenrent de résolution dc I'imag€sufiient,
ce qrù entalnelr
modifi tation de l'çchelle d'otrservation.
L2.4. Propriétés
deperceptior
dqstextures
Dans
[8],
L'auteur décrit deDr propriétés qui sont essentielles dans la façon dr: percevoil une ûexture : la régionalité et la résolqtion.La
régiomlité
conespoùd au \toisinage autour d'un pixel/voxel. Lafigue
[.6 pÉseûte plùsieùrs régioralités d'une rnême terih..i€ avec toùt d'al,ord en (a) unerjgio&lité
de 1. Danli cet cxempl€, nous ne pouvons pas eniqore parler de textures puisque la réCion est dësrite pa. ulrurique pixel. En offet, la notion de teltures apparaît dès lors où une région est coûrposée d'ut:L
I
Ckæinzl
_
Aath&zzguctiailjritoza*ér:istiauer@e
k
\é.glonalité égâle à 32. Si nous laL comparoas avec la figureL6 (c)
(.égio@tiré égal è 9pl,cellè.ci tre
content
qu'une partie de,$ motifs présents dans la texture.L,ir|folmatioo
soel,oo
peut obtenir sùr lme texhrre dépend1 donc ûès fortement de
la taille
du voisinaLge qucl,on
considère. I1 est doncdifficile
de caraf,tériser corectement unetextue
si la régionalité n,estpas choisie de façon aléquate.Figu re I.6. Infotmation isur ure textxr€ selon plusieurs régionalites
La
résolutir)n est égalrrmentlirillrordiale
en analyse de textures datrsle
sens oùure
texûre
peut apparaîbe commedifftiiente
selonle
niveau de précisiorr auquel celle_ci estobservée.
A
forte résolutior, nousca{rctfisons
ce qui constitue les prim:itives de bases d,rme texûrre Grerle,ganulé
de sabl,e, ...).l\
faible résoft]tioû, la texturc peut al)paEître mrtrmeure
jùxtaposition
desrnotifs
de base phLf grossiels_ Selon l'éohelled,obssvation,
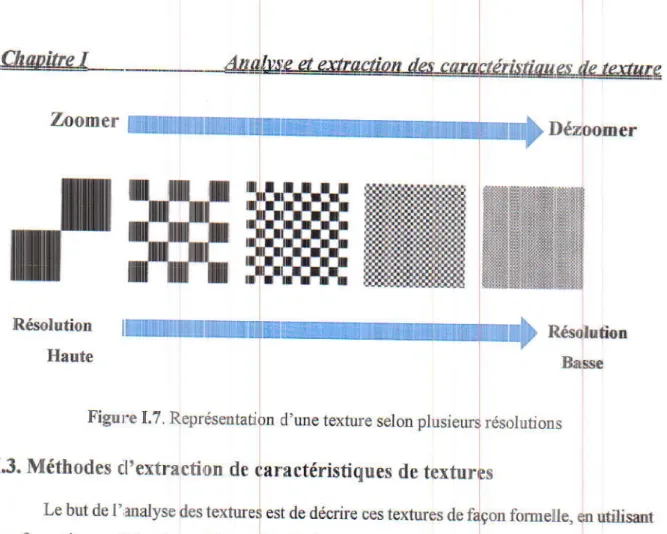
otr aura des caracteristiques dif lérentes mais compl émertaires.Ce principe est rotammeût utilisé par les ondelettes ou les fractales multi ré$olutions. La figure (L7) Illustre bien ce phénomilne. En noùs éloignant,
I'irformati(m
concenunt latextue
aux résolùtioDs hautes ost perclfe aùprofit
des infomations texlxfl)s bassesfHf
ffiWtr
Z,oomer
Résoluton
IIIâutG
Iréimomer
Figure I.7. Representati
I3.
Méthodes
rl'extractiion
de
âractéristiques
de texturjes
Le but de l',malyse des utre
foûutioû
malhânaticue. Uneûéthodes
olt
déjà ,iré Foposées datrs a litterature et éFoùvees en prpique. d'unetexhre
selonplusieu!
résrrlutionsResolutioo Brssg
et
1'anrûyser les images en
d'altribÙts de
textue
[l,
9].L8). Nous daaitlons dans la
Les paramètres caloultis penr
dotc
de oamctériser questionafin
de les segmenter.Il
€xi qùahe classes connùes Notons qu'un attribut peut satisfairesurte de oe
ch4itre,
chaque ca:égorieùsieùrs propriétés (fi gùre
'attibuts.
Figure I.8. Les classes d'attributs texffre.
cLsDitæL
-
dng
:lttisusï=deJe!ry
L3.1.
Attributs g€ométrhues
La
famille
d'attributs
géamélriquesest
généralemeûtadaltée
à
la.
perceptlotrmacroscopiqùe d( la textrre. Le calcul de ce
Rpe d'attributs commence par che.ch..f des motil:s
de base (prirnitil's I de la texturc et identifie ensuite des règles de placement de ces pnmltrfS. En effet, les
athib'ts
géomélriquesexige't
la régularité de la texture etudiée.Il
est à
n.ter
que cettefarrille
d'attributs est très peu utilisée vu qu,elle ae prend pas en compte les inéBùantés dela
texture fort€ment Dres€ûtes dtms les images mturelles [10].
En ce
qui
;onceme leu. utilisrltion en analyse de texfures, I,appl.ochè latrus
souventuilisée
consisteâ
binnriser J'image originale de texhue,à
r,aide de seuils difiri:entset
dc calculer l€s attributs géométriques sur le$ régions ainsi créées.1.3.2.
Attribùts spatio-fréctuentiels
Les attributs spatio-fré,queûttels s,e divisent en
fois
calégo es : oeux qut. lie calculen1dans le domaine sp ntial, dans 1,3 domaine ilréquentiel ou bien dans le domaine spaho
liquenti€l.
Nous
détaillols
dârs ce qui suit chaqur: caregone :L3.2.1. Dâns
ledomâine
sp,atiâlLe calcul d'attributs de texture dars le domaine spatial consiste à cal.acténsex ta
textue
par le nombre de tlansitions par unilé de surface. par conséquent, coûtrarement aL[K rexa!€s fines, les textures gfossiàes ter1delrt à avcù uûe faible deûsité de transitioll [9].Ceperdant,
ce type d'attributs
sutilise
beaucoupplus
dansles
problématlqBesde segmertation d'imrg€.
L3.2.2. Dans
led()maine fréquentir:l
Le caloul d'ùttributs de texture dals le domaille Èéquentiel consiste à elïeoruer lme
hansfonnation
du
rlomaine spatial au dcmaine fiéquentiel. Les transformatiors les plùs épandues sont effe rtuées par une transformée deFoffrier
et une transfotmée elr cosmus.Celles-ci sont basé:s
sur I'utilisation d'un
ensemblede filhes
sensiblcs chacunâ
ùre
Aé$rçnce particulièie.
A
partir de l,image résultante (image filtrée), les aflributs de t_xture sont calculés en utilisant desontls
statiiitques à savoir l,érergie et la variallce.Il
est â noter que la transforméed:
fourrjer et la translbrmée en cosinus sont souventmieli
adapté9jpoul
des images ayadt l€s zotres homogàtes (texture g.ossiè.e). par conséquont,
l,intégalité
del'informatiotr est riFesentée par les brmses fréquences
t
ndis que les hauks fiéquoncessont reservées à des chrmgements locaux.
13.2.3. Dans
le(lomâine
spatio-f!équ€ntiel
Un troisiàne type d'attributs
dÈtexû[e
associantles
deux drmraines spatial etfréquentiel
eiste.
Parmi les transformalioas issuçs de cette catégorieet
coDrmuDérDentutilisées, nous poùvons citer
la
trar]srfirnlrée de Gabo.[11]
etla
traNfomtée d,olldêtetesI
l2].
L3.3,
Attributs
statistiques
Les attribùls statistiqùes tradùiseitt
la
relation(er
te.mes de variation de coùleûr) entrc irn pixel et sei voisins en tenant compte d'un système de voisinage ctéhni a priori. Les attributs statistique i pguvent être divises er trois ensembles à savojr les aflributs stalistiquesde
premier ordre
tel que
seul€mentle
pixel eû
qùestion est
pris
e,ncompte
(les histograrnmes), les athibuts statistiquqr de deuxième ordre (les matrices cle co_occurences!t
l€s
histogramrnlrsde
sommes€i
de differences)€t
les
attributs stirtistiques d,ondrcsupérieu (les matriles de longùeurs dç plages). Notons qùe les attributs stati tti ques $ont très ûlilisés glâçe à la pr)rtinence de leurs outils poru caractériser même les textùres fines qul ne présentent
pas de régula tés
appat.(xrtes.Nous
rappelons, dansla suite, les
altributs statistiques de texture, de chaque enseurble, les plus communémenr utilisés.L33.1.
Àttributs statistiqu€s
depremier ordre
Les statistiques du premier orô^o nLesurent la probabilité d'observer rm niveau de gris À
ulr
emplacementaljatoire d'une
imagg. i3lles sont calculées àpartir
deI'histogrilnme
des hteûsités. Parmi les attributs du prçmiia: ordre nous rehouvolls :-Les moments d'ordle k.
-L€s moments centr,ts d'ordi€ k avec :
l,a
moyeDne des ûiveaux degis,
LaL variance, Iæ biais,L'aplatissernent,
L'énergie, L'entropie,
Le
contraste,La
dl,narnique,le
coefl:ici€nt devanarion, L'exposart de Holder [13].
Pour
amélior:r
la qualiré des stalistiques,il
estcolseillé
de requ?ultjitier l,histoerammeeoyen
par prxel. Les mesulessignificatives.
L3,3.2.
Attributs
strtistiques
de
læs deux athibuts
co-occwrerc€s et les histogrammes proposees par [l41, coûstitueût un
ente
les pixels. &L effet, cet outil pçû t@atrt oompte d€ la relation soati
L3.4. Matrices
d,Èco-occurrencesi
Les
matrices despahales iûter pixels. Elles permett
statistiqres sont
accumuléesgtr
un dqEndaûce spatiale de dqrx niveauxdériver d€
la
mahic€ de ço-occurreaI'entropie, le conhaste l'homogéoéité La matrice <le co-oocurrence de valeurs de pixels situés à une la probabilité P (Nr,
Nj,
d, 0,1 qui repr appa.aît à une distaloe relative (d)d'
drcite .eliant ces derx pixels par
d-
I
ete=0",45',90.
et 135". tæs ûéoessaires au calcul des matrices derisqued de
dev€ni
peusont les uraftiaes de
de co-occurrences,
des hteradioqs
qutiales
ruvۉu de gris
n5I
tout
siûple
d€srclatio$
2
de I'iqrage- C,€s chacuae mesurela
déplacenent.ûl
peut comme I'eaergie eD 1973 [16].d'apparition c{e's
pùes
basee sur ls calçul de de niveau de gris
Ni
I'orientation de
la
emoût pour yaleut mpport à I'orietrtation,(i.e).
s dans ua voisioage
de second ordre les plus somme et de différeoce. Les
Fxirfomant pour la descri d'étudier la distribution
eDhe les pixels.
(ônsûtuent une représentati cl'estimet les statistiques
d'
eniemble de maaices 2D
€
s, étaùt donné uû v€cteurdes caactéristiques de
la
1., oonélaton. Elles ont été
i
et de détermùer la fréqu tlistaace dans I'image.
Elle
le nombre de fois où ua oi
pixel
de aiveau degis
Nj
età l'horizoDtal (0). Oû plend
oûs de voi sinag€ entre pixels
Figure L9. Huit pixels plus cooccurrelrce. Les plus proches
5, poùr 0 =45" les pixels 4 et 8,
Les matrices
obi
ues seloll equæions : (1.1),(l.2),
(1.3) er (1.4)Ni
€[0,2P-1],
(m, n) celles du pixel P(rvi, w,,d,
45') =
(k-m=
d,l
P{4,4,d,
e0')
=
l(k,l),
(rn,n))
€(
P(/Vi, Ni, d,135')
=(k
-m
=
d,l
culer la mahice de:0'
sont les pixelsI
Êtpour 0 ='135" les
cdlculées À I'aid€ des
pixel de ui.r'oau de gris
n le nombre de bits [17]. d).1
-l
rr.r;
(r.2)
o.3)
(L4)
voisins utilises pour
isins de
'x'
selon la direotion0
=90'
les pixels 3 et 7 et pixels 2 et 6.quatre
diections
sont(li:,
L)
sort les coordomées dm veau de gris
Nj
e [0,2P-1]
,)û)2tq(k-m=0,11-nl
(m,n))
€(N.M)2
tq
n
= -d)a(k
-m
=
-d,t
-Ik,r
=&
1n.h=4
.tV)2tq(lk-ml=d,t-n
l),
(tn,n))
e (N.M)2 tq
1=d)^(k-m=-.t,1-n
4r
=
^ti .Im,n=
/UJL3.4.1. Attributs
d'Haratick
Afin
d'extraire des attributs@t été définis par [18]. Ci-dessous les plus pertinents [19] :
- l'énergie
: -Etr/lg, mesurela
distribution
d€sriveaux de
gris &placarnent conespond alors àla
- le contraste : C^tI, sa
val€u
estd'
pixel ùès clair à utr aùtre hès fonce non conélé à I'energie., quakn ze indices étant les
plls
utilis€s etforûgs valeu$
lo$qrc Ia
odique.Dans ce
cas, leGs)
des Passagesdhl
Paramètre est fodement
(t.6)
àl'er€Igie,
l'fûkopie
o.7)
Sa valeur algm€nte estirdéFndart
(r.8)
relative audél
aE€m€ntc'"=I
- I'ertropie
: ENI,
mesure leaûeint de fortes valeurs pour les
I
E"'=-I
)'
-
la variance
I
VAR,la
ya'iance 8r lorsque les niveaux de gds différ€ûtdu contraste.
VAR
=
-
h
corÉlation :
COX, ce Daramèhedes
matrices
deco-ttxture
det matriçes de6 paramèhes consideres
ie de la
t€xtue. Ellc atteht
constanteou de
forme)i
l(e"-,ra,ex)
plus élevée quÊ la textur€ I'image(fod
contaste). C)i
[r",
-
',;'
'
PN.N{d'
dans
I'inage-
Coatrai complètemerlt aléatoùes.PN i,N
J (d,
9).
logz
lP*
rn,
(
I'hétérogénéité de la
rapport à leur moyenne. Ce
l{N,
-
ù,
l
mtsure la dépendalce linéaire
e paramèûe n est coûélé ni à
COÀ
=
lx,
!s;
(r.s)- l€ mometrt de différence inverse : 1DM (pour Inve$e Différcnce
Molnert),
à l! ûvelse dela
vamatrce ce paramèhe, mesure I'llontogénéité dela
texture de l,image.Il
est correléà me
cornbilaison linéaire des paramètresiirvli
etCSr.
:rv;-O(rr-r).(r",r,
1ae;)l
----;-.--l
;
(r',"
ra,el
)l
l*
(",
-'r1
IDM
=
(r.10)
Tous ces attributs sont défir:isrpour un€
\deur
de déplacement ,,d., donc, le r:hoix de ce paramètre est détermirimt pour I'obteiticrn d'un résultat de quâlité, cependant, il n,f':istepas de règles pour choisir de bomes valeurri de deplacement. Récemment, de nombreùseÊ études ont été me'ées
afin
de caractériser et classi|ier des textures osseuses à l'airre de ces Daramèkes [20-23].L3.5.
Attributs
bâsessur la mod6,lisntion spatiale
Cette catégorie d'attributs dépend essentiellemert de la répartition spatiale des couleurs
dms l'image. Par conséqùent, l€ calcul d'attribÙts est effectué en modélisant c€tte
r.êartitio,
spatrale. Parmi les modèles les plus rtipandus, nous pouvons citer deux m(dèles survantsl24l
i 1,3.5.1. Les modèles deMARK0V
L€s modèles de
MARKOV
oirnsgjlueng,.
.as particulier des moclèles auto ].églessifs.L'intérêt de ces modèles û)ar rapporl aux modèles autorégressifs) réside dans leur sit.atégie de
modélisalior
des interactionsspatial$
cntreun pixel
avec sesvoisins
cequi
nécessite la définition d'un système de voisinage. En effet, pour définir les champs de Markov, l,image estûodélise€
etrun
ensemblefini S dç
siles s, correspondant auxpixels.
À
chaqu0 site, un descripteur est associé, ce qut permet de d,3crire l,état du site. Le descripteu peut êtra l€ ûiveau de gris où uoe étiquette, maisil
perrt ,!re rure iùfotmation plus coùplexe [i]5].L3.5.2. Méthode
d€smotifs binâiircs
(LBp)
Le p.iûcipe de cette méthode esrt d9 comparer le niveau de luminanc 3 d,ur pixel aveÉ les
niveaur de ses voisins. Celarend donc conrpte dlme information relative à des rnotifs
réct
iersI
)1.
Ch@ùtLl
hlghulf,-g-qÛac'tion
descaructeÀtioues
deMile
dans
I'inage,
autremetrtdit
unete:ûxe.
Selon l'échelle du voisinage utilisée, certaines zonesd'intâêt
tel des coins ou des bords perNent êhe détectées par ce descripteur'L'opérateur d€
motifbinaire
local [26] est un moyen efficace de desodption de texhÙe-Nous détaillons la méthode des LBP dam ce qui suit.L4,
L€s
motifs
binsires
locaux
(LBP)
L4.1.
Définition
læs motifs binaires locaux (local biû44/ pattems en aoglais) sont des caractéristrques utilisées en
visiot
par oidiûateur pour reconnaîtl€ des textures ou poul la dét€crion d objgt damdes images numériques.
Ce descripteùr a eté meDtionné pow la première fois en 1 993 pour mesùrer le coûtrast€
looal d'une image mais réellonent popularisé 1lois ans plus tard pæ Ojala
en
1996,afin
deça.'actéris€r les texhlres présentes dans des images en niveaux de
gris
lls consistent à âttribuerà chaque pixel P de l'image
t
(i,j)
à analyser, une valeur caractérisant leûotif
loÇâl âutour dece pixel. C€s vâleus sotlt calculées eû comparant le ûiveau de gris du pixel central P âÙx vâleurs
des dveaux de gris des pixels voisins [:17].
t.42.
Principe général
Le
concept duLBP
est s|mple,il
propose d'assigner un code binaire à unpixel
enfonciion
de son voisinage. Ce code décrivant la tçxture locale d'une région est calculé pat seuillaged'un
voisinage avecle
niveau degris
dupixel
central.Afm
de générerun
motif
binaire, tous les voisins prendront alors une valcur " l " si leur l'aleul est supérieure ou égâl€ au
pix€l couraût et "0" autremont (FiSrue
I.11)
L€lr pixels de cemotifbinair€
sort alors mÙltipliés par des poids et sommés afin d'obtenir un oode LBP dupixei
courant Onobtiett
doncpoù'
toùte l'image, des pixels dont
I'inti
nsrté s€ situe entre 0 et 255 coûme dans une image à 8bils
orditaire. Plutôt qùe de décrire l'irnage par la séquence des motifs LBP, on peut cholsrr com&e
dos€ript€ur de texture un histogramme de dimension 255.
Un voisinage pour un pixe l central est f,iparti sur un ccrcle et coûstmit à
pa*ir
de deuxpaiamèfes : le rombre de voisins
$ù
le cercle et un rayoû pour définir Ùre distance €nbeull
Dixel cenhal et ses voisins. Définirisoûs ùnet€xhfe
ISeuillage lJnité de textun)
t
-
t (Ec, gr], .. , gP-t) M!ltiplication (r.11) Code LBP = 2+4+128+64+32 = 230Figure I.10. Construction
d'ur
motif binaire et calcul du codeLBP'
g"
conespond à la valeur de niveau degis
dupixel
central etg''
avecp
:
0
P
-
1'corr€spotd au niveau de gris de P pixels espacési régulièremeût stÙ ui1 c€rcle de rayon
R
Si l€scoordonûees de 8. sont égales à (0,0), alors les coordonnées de gt sont données par '
(Rsin
(2trp,P) -Rctts (2ttP/P)) (r.12) Comme ùous poùvotrs leloir
à la figureI9
les coordonnéesd'ut
voisin ne soût pasforcém€ûtsihréesaucenhed,urpixel'Danscecas,leniveaÙdegfisestcalculépdi
t'intermédiaire d'une interpolation
bilitéaire
[2]ll
Voici
uIIe représentation graphique de ? faisant varier les paramètresl'
€t 'R :et de son voisinâge
g,
Figure I.11, ReFésentalion du pixel central
&
Par la suite,
&
est utilisé comrne ùn seuil de la façon suiviute0.É)
T:
t (s(go-
c.,..
, s (qc-t-
&))
Chnitre
I
Anahtse
d
entaction
descarattérisliouac
de,eÉute
Avec r(.r) égal à
I
si.r positif et r(.x) égal à 0 si x est st ictement négarifEn multipliânt chaque fonction .r (gi
-
&)
par uu poids de valeur 2P, on obtjent alols un c,odobinaire t€l aue :
LBP
p,
R\rc, yc)=',le_]
tbo
-
g")zr
(r.14)
L4J.
LBP uniforme
et
invariant par rotation
Un
motif
binaire r-rnifonne est définit, cotnme étaût tout motifpossédant exactement 0ou
2
transitions(01 ou
l0)
dansua
parcourscirculaire
commele
montrc l'exemple
dela
Figure
(I.13)
(par
exemple 10000001ou
00011000 estun motif
uniforme, mais
pas00101010).
Cette
notoû d'udformité
eltt importaote dansla
méthodeLBP
poor r€presenter les informations de p.imitives structuælLlos coûme les arêtes (coins) et los oontorEs.->
o\
o o o2'1
'-\
t\
p'--q
é
ô=rf ?=l?
ç
\o-!
\.o_c \._,
Motifs uniformes
lvlotils non-uniformes
Figur€ 1.12. Exempl€s de comtmcticû et ùniformité d'ua
motf
l,BP,
.7
=9
l7
t5
6ac2 12
0l
52et motiflr uniformes E: nol-uniformes.
(r.1s)
Avec j = 0, 1,...,
P-
l,
et ROR(r,,)
petmettant de faire uæ rotatiotr bit à bit dex et i fois. Aveccetre méthode, 36 motifs
differrrts
sonl cotsidérés au lieu de 2PPour suppriner I'effet de rotrLtiqû, un code I,BP @APe
fl)
est <tefini en vue d€fttuum€{
nne valeur uaique quelle que s{'it la rogtion âppliqùée :
LB.Pp, dt
=lnin
IROR (LBPP4,ù|.r
p.09
or I
."
+Figure
L13. Liste des 36 uaiques motifs binaires locauxinvariatt
en rotatioo possiblespoul
lBPar",.
læs points noils et blimçs oo4€spondqrt respectivcm€nt aux laleùIs d€ bit 0 et 1 dans la sortie sur 8 bits de I'openteùr ROR(.)[29].R=
1,LBPspi
ûe pennet pas d'obtenir de bonnes performances [30]. Laprircipale
niroû
est que l'ooculreûce des fréqtr€qoes de cefiains de's 36 motifs possibles varie fortem€nt(iDstabilite). Pour résoudre cæ
plolrlèFe,
tme mesru€est
effectuéesul
l€smotifs afin
dedétermirer
s'ils
soûtutiformer.
Pour icela unc lbnctionU
reûoumg le Àombre de ûaûsitiotrsspatiales (passage de 0 à 1 ou cle
I
à 0). Si le nombre de transitions est supérieui à deux,alqs
le motif est cotrsidâé coûme
ma-uff4rme.
L'operatew awaléLBW2
est dçfini de laÈçon
LBPift2
={Xlçg-",
s;u(i,re".") <z
(L16)
Sillo[
Avec
u(LBpp
=
ls(so-,
-s") -
s(oo-
9)l+
)"
1s(90-
e.)
-
s(so-r
-
o.)l
Uae mesured'uniformité-(r.
L7)
Concemant les moûfs
tnifotmes,
I'opérâl.eur LBPfrliffz correspond à la somme&s
bits
du voisinage.Au
cotrtraire si lesûotifs
sont ûon'uhifonnes, I'opérateùr est affecté à la valeùrP +
I
(Figure l.13). Le nombrc d'apparilions de ch.aque çode est acoumulé dans ujl histogammede
taille P +2.
Chaquet|alch,r
de cethistogartm€
donn€ une €stimation dela
probabilitéd'apparition d'un motif dats une textwe. Les texhlfes sont caraotérisées en utilisalrt directem€dt I'histogramme des codes binaires.
Dans [31], les auteùrs rpropose{t une variation de c€tte méthode en
coordo$ant
1d€invariaæe
à la
rotationà
la fois
pllobale et locâle. Dans un premier temps'ils
utiliseûtla
distribufion
LBP pour
déterminer l'orientation principale d'une texture
et l'utiliseot
afind'aligner
l'histogranme
LBP. Dan$ lafigue (I l2),
lemotif
uniforme obtient le mêrne codeLBP
quolle quesoil
soû odedation,. Lefail
d'aligner l'histograÙuneLBP
selon I'orientationprincipale
{irformatiot
globale) pernet dedifférelcier
ces 3 motifsutifo.4es
et
leùraffectat
des codes binaircs différenls.I.5.
Conclusion
L'analyse de texture
fait
état d'un grând nomtr€ d'approohe çt de méthodes existantes dansla
litterahre.
n
esttéhoin
d'un t,esoiil clotissanl de connarssance plus approfondie$rl
lanotiot
même de
texh[e
et de mecanis'me humahe de p(]r€€ption des texhlr€s. Cech4ihe
dotne Ùtedescription de
la notion
de texh.uç, et lesdiffû
entes méthodes utiliséespoul l'ana\se
detextûre.
Nous
avons présantéla
mélhodeLBI'qu'est
baséssur l'extraction
des âttributsspatiaux. Ou chaque
pixel
reçoit u:n code binairequi
dépend des valeurs des pjxels voisins Cette méthode LBP sert à classerlel
images textùrées.ILl.
Introduction
La
reconnaissancede
classed'objets
estl,un
des problèmes lesplus
rJifficilesen
reconnaissance de forme. Les approches les plùs {lmcaces
utilisert
une description locale des iûages et des méthodes statstiques de classifioatiorr pour l,étape de reoonnaissance. En généralIa reconnaissance de forme €st une braûche de llntelligence
artilicielle
qui fail largemçqtepel
aùx tecbniques d'âpprentissage aùtomatiqùe et aux statistiqùes.II.2.
DéIinition
de
lâ classification
L'objectifvisé
dans nohe oas paf la classifioatlon est de pouvoirdislin$ler
eûtre des classes d'images correspondantesà
des texhrf€s différentes dans ùnesâie
d,images_ Cette méthode est basée sur. I'apprertissagesuivi de
loL classificatioù.La
phase d'apprenossageoofiespond
à
l'extractioû d'attributs
caractéristiqresà
parlir
de I'imag€ dars
la
basedhpprentissage. La classification c'est la phase au cours de laquelle sont utilisés les
attrihts
precédernmert extraits alin d'atteindre
i'objectf
initial.
La
classification, en géûéral, se réfèreau
classemeùt ou groupement d éléûents de donnees dans des ensembles similaùes.La
classifir;aton a deux significatiors distmctes. Oû p€ut recevoirùre
série d'observations avec I'objeDtif d,établir I'existence des classes ou desg.oupes daûs les données. On peut savoir avec certitude
qu'il y'a tart
de classes, etl,cbjectif
cotrsiste à instauer u1e règle selon laquelle nous pouvons classer une nouvelle observation dans
l'uoe des classes existatrtes. Le premier type est çonnu comme l,appretrtissage non supewisé et Ie second comme I apprennssage supen isé
La classification d'image est erl général
siailaire
à la classification des données_ maiselle
peut
êtle
différente
en
forction de
l'application
danslaquelle
elle
rxt
utilisee_ I_aclassification est souvent la demière étape d'un processus de diagnostc ggnéml (Figure tr.1).
I
s'agit gén&alement
d'un
t'ri
d'objets dans uneimrge
ou plusieurs irnages dans des classesdistinctes.
Figure
II.l,
Sohéma de d'ùtr système de classificatiotr.ILl,
Les types de la
classificâtioh
Les algoritlm€s de olassificatio+ peuvent êûe
r@rtod€€s
de plusieurs nanieres(voir
figure
I1.2).Un gemier
critère
et le
niveaude wpervision,
c'esi-à-direI'importmoe
deI'intsveûtion
del'utilisatcur
dans lc prqoessus de classification.n est égalemçnt possible de sépafer les algoritbmes paramétriques associés à un modèle
Fobabiliste des algodtbmes non param{triques [32].
Supervisée Pârâ mét.iques Noar sùperv:sée
sêPâration à vâste mafg€ perceptron multÈaouche5 K-rneans cârtes de kohonen clâssificâtioar hiéarchiqûe me)(ifnum de vraisqmblance mélânge de degâusgienne5
IL3.1. Classification
non supervisée
Cette métbode est aussi appr:lee classifioation automatique
(clusterilg
en anglais) ouercore "regroùpement"_ Aucune information a
priori
sùr la texture n'est coûnue. On cherche alors à regrouper lesdifére'ts
exemples de textufes àtaiter
enfo'ction
de ra vareùr deleus
desûipteurs de manière
à cÉer
des classes homogènes.On
supposequ,on
disposed,un
€nsemble
d'objets
queI'oû
note
parX
:
$t,.ra
..., .rtr/
caractérisé parur
ensenble de descripteurs"D", I'objectif
du regroùpement est de trouver les groupes auxqùels appartiennentchaque objet
'1"
qu'on note parC
:
{ct,
cz, ..., c,v}. Ce qui revielrt à dételmioer uire fbûctionnot€e
"Is"
qui associe â chaque élément deXun
ou plusierrs éléments de C.Il
faut pouvoir afe.cter une nouvelle observationà
uae classe.Les
observatons disponiblestre
sont pasinitialernent identifiées comûle appantenant à telle ou telle
pog
ation. L'absence d'étiquetie declâsse est
rn
loùrdhaldicæ
qui n'est $retès
part] ellemert surmontable. C€ procédé ne€cssite généralemsnt defixer
au préalablele
nombre de classes désirées, que cesoit
demâniùe
emplnque
ou
automatique[33, 34].
Parmj les méthodes non-supervisées les plus utilisees,citotrs deux t'?es d'approches i les cenhes mobil€s ('-means) et la classification hiérarchique.
II3.2.
Ctassification
supervis€€
Dans cette méthode de olassification, on rlispose déjà d'exemples dont
la
classÊ Èstcoûu€
et étiquetee. Une infomration sur les données à haiter est disporibl€ et est utilisee pourent ainer le processus de classification, cela constihre la phase d,agprentissage du rnodèle. Cqtte
information
appelée ensemble d'apprrentissage est generalement constitùéed,ùn
ensembled'ûdividus
{câractérisûques, classe associée}. Dansle
câs dela
classification de texhrfes, I'ensemble d'apprentissage €st constitué d'un ensemble de textures ,types,,. Chaqueindividu
eS donc composé du coùple (caractétistiques de
tqtures,
ûgxhue associee). Cet ensembl€€d
alon
appris par un algorithme de classification suprrvisée classiquepami
lesquels, oncite:
lesl-plus
proohes voisins (È-NN), les réseaux de neÙrones, les machines à support de vecteùs (SVM), etc. Uûe fois la phase d'apprr:ntissage réalisée, l'algorithme de classilication est alorsutilisé afin de déterminer la olassification d'ua ense,mble d'individus tests oomposé d'un
græd
trombre d'échantillors [33].
Le
schéma présente surla
figure
(II.3)
illust€
demadà€
généralela
méthodeè
classifi cation suocrvisé.Apprentissagg
Réduction de Ia dlhension
Classifiçatior
Figure
IL3.
Etapgs de la classification supcrvisee. Cette méthode est divisée en deq( phases sùcc€ssives [35] :L'apprentissage, a pour bpt de construire des class€s à partir de l,ensêmblê dcs
protoq?es (égal€mcnt appelé ensernble d,appreûissage)
[361. Dans ûoA€ cas, l€s textures plesentes darg les images
plototlpes
sontdffit€s
par un ensembled'attributs. Chaque texhrle est alors représentée par
w
vecteu
d,att
buts datsur
espaoe d'attributs.Uq çlassifieù
est eûsùite élaboÉ a{in de daerminerla
class€ d'appartetrance d'qne image en fonc'tion de ses caraçt€dstiques.
La
classificatioû, corsistç àappliqrer
lesÈgles
declassificaiior
détermiûées lors de I'appreltssageaf$
de classer I'image d€ latexb[€
à oostrôler.IL4.
Méthodes de
classificâtion
Une fois
la
sélectioû des caragtéristiques effe-otuée,ûous
pouvonsproéder
à
la
classification des
images texturegs, Lres méthodesutilisees
pour
la
classificauonsolt
nombreùses,
![Figure III.1. Echantillions d'imagP de texture de la base UIUCTex[49]. .. . ,' .'](https://thumb-eu.123doks.com/thumbv2/123doknet/14529663.723364/10.892.130.811.288.1241/figure-iii-echantillions-imagp-de-texture-base-uiuctex.webp)