REPUBLIQUE
ALGERIENNE'EMOCRATIQIIE
ET
POPULAIRE
Ministère
deI'Enseignement Supérieur
et
delâ Recherche Scientilique
INIVERSITE
MOEAMED SEDII(
BDNYAEIA. JIJDL
Faculté de science
et
detechnologie
Département
de
l'électrotechnique
Projet
fin d'étude pour l'obtention
du
diplôme
de master en
Electrotechnique
Option
Electrotechnique
industrielle
Thème
Calculs analytiques
en
3D
des
interactions
entre
les aimants permanents
et
les
conducteurs
Encadré par
:
M:Naamane
MOHDEB
Réalisé par:
Bouhlas
abdelkim
kebsa
farestFa
Remerciement
Avant
tout
nous adressons
nosremerciements
à
ALUH,
le tout
puissant
qui
ma donné
la
volonté, Ia santé et la
patience pour
accompltr
ce
travail
lVûus
ddressoni
nos
sincèrcs
temerciements
à
:
Notre promoteur
Mr:
N. Mohdeb
pour
sesbons
conseils,
sesidées,
sescorrecnons et
sesremarques
tout
au
long
de ce
travail.
Ious
nos
enseignants,
en
particulier
ceux
de
I'étecùotechniaue
industrielle.
Nos
enseignanB
qui
n'ont
fdit
I'honneur
d'accepter
de
s,intéresser
à
ce
travail
et
departiciper
ù
ceiury.
Nos collègues
et
@mk soient
de
pris ou
de
loin qui
n'ont
supportés
et
encouragés
tout
au long de
cesannées.
En
fn,
ce
travail
ne
wud.rait rien dire
sans
remercier
nos
parents pour
leur
dévouement
incomnensurables, qui
m'ont toujours
soutenue et
pouss&
ù
donner le
meilleur
de
moi.même ;
pour
l'éducation
qu'ils
ollert
et
pour
appui
inconditionnel tout
au
long
de
ma
vie,
I
û&"oo
&*urg,
etuæ qtgilet qpi
t
âclairent nobe
vie,
L.*.f
l/Vgelaarente,
ffoo eîonfa,*,
{*
qÆ*nnnuro
ffiVapteI"fa*iIIe,
e ctf
'r
0w
vloô
crrcîô
om2.1,
Tq"o'1ffin*fI"guu,
Intftrd .tion généHlE
Introduction
générale
Des dispositifs complexes automatisés, à diiférentes échelles dimensionnelles, sont utiiisés dans I'industrie. Parmi ces dispositifs, oû distingue les sysrèmes de déplacement /positioDtrement plaqairo
qui
sont utilisés dans divers domâine.En
élecaonique, ces systèmes sont utilisés poùrI'alsemblage des composants électroniques sur les ciicuits imprimés.
L'appadtion de
nouvelle technologie permettent de réalisé des dispositifs miniatures etcomplexe à la fois, appelé microsystème, pour
la
fabrication de tels systèmes, une réflexion porte sur le coûcept de micro-usine pour adapter la taille des unités de productior ou de test à la taille des systèmes fabriqués.Dans
le
développemert des micro-ùsines, des lâboratoirestrâvâillent
sur différentes outils.Les technologies des microsystèmes visent l,intégratioû monolithiqùe des
fonctiotrs:
lcs cE)tcurs, les actionneurs et rraitement du signal. Ce concept est né d'une ancienne idée defab,riçer
des composântes non seulement électroniques mais aussi mécaniques, chimiques ou optiques, grâce
aux
procédéscollectifs de
la
microélectroniqueet aux
techniques,d
assemblage, avec comme avsntages la miniatu.isarion, 1a fiabilité et une réduction de coûrs.l-es
années90 ont
1,'lrle
succèsde
plusieursproduits
.micro-gmvés'corlme pour
les périphériques informatiques: les imprimantes àjet
d,enqe
(développéespar
la
société HewletrPackard), les écrans plats à base de micro-miroirs et les têtes de lecture/écriture pour les disques
durs.
A
ces applications grandpublic
se rajoutent d'autres thématiques commele
sectcur descâpteurs
(pression, centrale
d'inerti€),
de
l'optique (Micro-miroir), des
tâécommunicatiors (hterrupteur) ou de la biologie (détecteurd'ADN)
IBEN 061.Le tbrt
développemeûL actuel autoru desmiqodisposirifs
permer désormais l,accès à des applications lieês à la biologie, la médecine, l'électronique...Des
groupesde
recherchestravaillent sur Ia
conceptionde
systèmesde
déplacemeûtsûiniâtrres
pemettant le positionnement de haute précision (résolution inférieùre au micromèfte) deIntrodu.non 8énéHlz repose sur Le déplacemerrt
relatif
entre une barre d'aimants permanents miniatur:es et des bobines électriques plates.la
force
de
Lorentz enûe
cettebafie
d.aimantser
ces
bobinesgénàe
lemouvement de
la
sfti.lctur€ mécanique. Ccdispositil
de déplacement est basé sur une structure en fr-trme de Croix disposant à chacune de ces extrémités
d,un
moteur, ce
qui
pe.mera la
smlcnlre d'effecnrer des déplacements linéaires dans le plan(X,
y),
mais aussi des rorations autour de l,axe perpendiculaire au
plaù (0).
ce dispositif
est capabled'effecrrer
des déplacehents lrnéau€s surquelqùes millimètres.
læs ffavaux de Williams onl abouri à l,élaboration d,une platine de ranslâtion en lévitation électromagnétique
IWILI-
971.pour
créerla
force
aécessaireà
la
translation,des aimadts eû
disposition de Halbach sont colle€s sur la partie inferieurs de table
Dobile et
mts en regatd ùae bobine électrique à enroulement à
six
phases. L,actionneùrmis
en placeutilise
la drspostoûtr
ol
meûre en mouvement une table mobile (pour une application eù pborolithographie)
L'utilisation
do
disposition,
de
Halbach,
une
composante
rle
la
forcc
agitperp€ndiculairement à
l'axe
de déplacement. Cette iorce produite un iléplacemenl parasite suivant I'axe delévitatior.
Pou.réduire les effets de déplacemert de la composante paÉsrte créée,LbE
etal
iLEE
041ptoposent
d'assomblerles
aimantspùmanents suivant
un
disposition
appeléedisposilioû trapésoidale. Ces actionneus possèdent des dimersion importantes, Shùtov et
al
ISHU051 or1 développé deux dispositifs miniature (quelque centimètre)
:
h
premier urilise desmicÎo
bobine à spirale pour déplacer un aimant, le second est actionné par une bobine plane en
serpe*in
el] interaction avec des aimants réaLisés par sérigraphie,L'électromagnéti$ne est une aùtre solution
qui
permet de développer des dispositifs de positionnement en lévitation (sans contact) ou le positionûement planaire. Ce sont généralement de djmensionnemenf impofiante.L'interaction
entrela
sourced,induction
et un
conducteur étant muûrelle. Sprenger etal
[SPR 98] utilisent une source d,iûductionfixe
et conducteur mobile pourleù
actionneù. Les aimants sontfixés
sul un suppon métallique. La bobine est effoulée sufur
profilé
carré et creux dont les dtnensions permettentd'avoir
un faible entrcfer. Une dsiposition deHaltrach est utilisée
pour
créer des déplac€meût linéaire. Compterer
al
ICOM
04a] proposeotd'utiliser
cette meme dispostion pourcÉer
des deplacements plans.pow
cela,ils
utilisent, sur lapartie
fixe
dudispositil
unerçartiton
de la dispostion de Halbachsuivdlt
deux axes pour obt€nirùne matrice de Halbach.
lrs
bords de bobines consituant la partie mobile intetagissent avec les aimantspoul
cré€r les déplacements sùivant les deux axes. L'équipe deLomotova
a ûavaillé surce
problème.et
ils
ont
féussià
résoudtecaleul en publiant
les
expressions des tbrces. Iæs perfonnance du prototype ne sont pas donnée, en raison de confidentialité .In rodrctioa Eéiélale
læ
calcul dela
force gén&eÊp
t
les aimants devient alors plus complexe que lorsqu,unestructue fe'omagnétiquo entoure ces demiers. Iæ calcul de la force entre aimant-aimant et
aimaût-bobine
a
été
]ârgement discuté
dans
[ALL
lo]tROV
l0l.
Cc
calcul
basé
sur
l,éaergie magnétostatique et la force de l-orentz. Ce calcul analytique en 3De$
évidemment plusdifâcile
qùe celui en 2D. Iæ calcul et plus
difûcile
à cause des intégrations successives. Dan6 ce prcjet d€fiq
d'étude, noùs allons voir les gandes lignes de cette méthodologie.Dans
le
premier chapitre, nous alloosvoir
le
comportement et lesFol,riétés
de quelquesai{tanfs
industriels
qui
ott
le
potentiel d'êEe
les
élémeus
consritutifs
des disDositifs
de positionllement en lévitation (sans cont4ct) ou le positiomement planaire.Et
datrsle
deuxième chapiùe, on va proposer des modèles tridimensionnels pourle
calcùl dcs forces d'interactions entre ainlant-aimant et aimant-bobhe, Dans ce chæitro, on va proposerdes erpressions tridimensionnelles
pour
le
calcul
desforces
d'interactionsenûe
les
ainunis
permaneûtes et les bobitres de folme rectanqulaire.
-4-Aimart
permanents et
urs
planaires
A tnants penrutnenis et aL.t itnne urs
Aimants
permanents
et
actionneurs
planaires
I.l
Introduction
I-es charnps magnétiques peuveûi essentiellement être cléés à
pânir
de deux "sources dechamp". les aimants permanents et les conducteurs parcouus par des couiants
[l].
pourtant connusà l'époque des grecs, les aimants permârents n'ont connu leurs réels développements que depuis les
anrées
1930.De
noul'eaux types ont été
découverts,sFthétisés
et
industrialisés, avec d€sperformarces
telles
que tesapplicatons ont
pu
semuttiplier
dans de nomb.eux domaines, dêl'automobile à
l'électroacoustique, deI'horlogerie à I'industrie
minière, de l'électroménager aujouet,
etc. L'usage
des aimants permanentsest de plus
enplus
répanduda
s
les actionneuasplarairc.
Dans ce chapitre, ùous allons
voir
le compofiement et les propriétés de quelqùes aimantsindustiels qui
ont le poteûtiel d'être les éléments constitutifs des actionneurs électiomagnéûques planaire!!. Et aussi étudie les fonctions et la smrcturc d'un accouplement magnétique.I.2
Histoire
desaimants
permânenls
I.2.1
Caractéristiques généralesL€s matériaux que
l'on
utilise pour lcurs propriétés maglétiques peuvent se classer en deux grandes familles:.
f,es < maiériaux magnétiques durs >> qui sonf des aimants permanents..
Les
< matériaux rnagnétiques doux> qui
ne
présentent des propriérés magnétiques qu'enDrésence d'une qxcitation extérieùe.
Fig.Ll Cycles d'hyst&ésis des matériaÙx Durs et Doux
-{-I
eI act ionne ws plara ire s
En effet,
quald
un matédau est dans un champ élecûomagnétique extérieur,il
se créelme indnctio4 magnétique propre au
qui
e$t due à la polarisation des domaines, petites régions dâns lesqueues lesdi$les
champ extérieur,
il
reste unepolai
s'ori€rtert
localcmeÀt, LÆrsqu€l,on
supprime lepemanente dans ie cas des matériaux magnétiques durs, appelée Émanence, alors
Er'il
n'y
ell
e pratiquement pas dans les mâtédauxûagnétqùet
dolû
IALL
10]. La cowbe relative à chaque$pe
de matériau esr appelé€ cycle d,hystaésis.Il
existe maintenant une variétéde
matériauxpoùr
aimants permanentsdolt
les propnétés et les applications sont rrès
I.2.2
L'utilisation
des aimants C'est ajnsi qu environ 300 000[æs aimants permanents ont d' été élaborés à parfir d'acier ou de chrome-cobalt.
Au
cours des arutées 1935. los sens ont
à
étudier des alliages defer-alumidum,
ûickel,cobalt et cuit're. Ces alliages fondus ou
tÈs
peu usés de nosjouls
dufait
deittés sont connus sous le nom de
tconal
ou alnico.lls
sontpdseûce de cobalt (très
cotieux) et
de leurs modc.stes propriétés magnétiques.année, entraînant une concurrence
in
plus obligés de faire appel à
l'
datrs le domaiûe
gand
public.L23
Difrérentes types d€s aûnantsA
I'heùre acû-relle,il
exisreTiconal).
2) læs ferrites dures.3)
permanents Néodyme-Fer-B ore.
>
Lesaimarts
permanentsAlnico
d'aimants permanents sont utilisées dans le rnonde chaque ationale sévère entre les diffétents constructeùs. de plùs en et à la robotique pour rester
compétrifs,
en particulie!familles d'aimanrs perrnanents. Ce sont les
: l)
Alnico (ouaimants pemanents Samarium-Cobalt.
4)
Les
aimantsFig.I.3 les Fcrriies dùres
drEes sont
parmi les
aimants Ies phrsutilisés à
I'heuree, d'oxyde de ferrite
avec d'autres maLenaux commeftagiles, se dilaient facilement er sont plus durs que les Fig.I.2 Alnico
>
fæ6 Ferrites duresDans
les
années50,
lesactuelle,
Ils
étaient composésfeûites
de
trarFm
et strontium. Par ailleurs,ils
(voir Fig.1.6). Pour bien comI'Ie4ùF,
II
(II)
Êt en polarisation JGD. Iæ p4ssfCe:Ê
=
pH
+
JAYec le champ
H
expriné enA/$
Ftl'
ArDraNs wrmaLc7us et actioûeufs pl4traùts
Fig.L4 Samariun-Cob4t
>
L€saimsnb
pennaneûtsIJs
aimants Detmanents cobaltont
été dé.ouv€rts dans les arlûé€s 19@- Cesaimafs
prés€ntDnt des perfo.n4nqes très supérieùes aux deux familles précéd€des, notamrnent en teûnes de tenue eh mais leur coùt constitue un inconvéniert maieur.L€
cobôlt est uû matériau cher, strawgique dont les réserye.s sont concetrtxées dans un nombre
éduit
de pays. l,e samarium ett l'une 4bs rares les plus chères(Fig.I.4).
>
L€saimints
permatretrtsN
bs
Nôdyme-Fer-Bore ûittes
meilleures perfomances magnétiqles
Dars un airnaût, le champ
H
e.stDo
I3
La
courbe de
rl6ainanfafion
sotrI
apparus Eaxché actuel.JerB
0.9&
de désaiûrantaiio! d'un aimart
caractérisés pal leurs cycleù d'hysréresis et
aimartation du deurième quadrant du plaû ts-H ou
J-H
iste deux desshs
dr
cycle d'hystérésis ; en iûdu€1i@B
'ùne représentation à une aut e ôe fait à partir de la r€lalioo
B
ainsi que la polarisation J exprimées @ Teslê.daûs
les
anné€s 1980.Ils
présenæÀt l€s Fig.I.s Néodyme-Fer-BoreCdto
couôo
est caractédséo DaÎ:J-L
Ia
polarisationrématente
Jr,polarisation résiduelle en champ 2. læ champ coercitif HcJ est le
champ coercidf
IlD
celui qui annu est stable vis-à-vis de la désai3.
1-Ê champHk qui est
un
bon concepteur de machines àAp
doitdoûné peut supporter. On désigne dans.
4.
Iæ produit(BH).d
d'ùn aimantle
volumeminimal
d'aimant,il
chanp
>
soit
mærimal. Iæs corrcsponda[t à(BH).*-On peut classer les différents
colubes de désaimantation des EinciDa types d'aimants.
NNiCo 240 C.
Nb-Fc-B
E6-AJm)
e I acttonnears p hnaire s
est
confondueavec
l'jnductjon
rânanenie
Br,
est
ladémagnétisant nécessaire pour annuler la polarisation, et le
l'inducûon. Plus Ia valeur
de
II"1 est élevee, plus l,aimanr on.de
la
courbede
désaimantâtion.En
pratique,lè
lavaleu
limite
du champ magnétique qu'unAp
nr
celte umtte adrtusslblequi
est précisément définiesa valeur érergétique par unité de volume.
pour
utiliserquà
sonpoint
de fonctionnementle
produit <<indùcrion-lL
et
B.
définissent
le point de
fonctionnemeatd'aimants en fonction de ces paramètres. Fig.3 donne les
B(T)
l2
1.0 û.8 0.6 u.4 0.2Fig.l.7 Coùrbo de desaiman
I.4
Intérêt
desaimants
Pourla
magnétisation de rendement et la compacité dans le cas nombre de pôles). (Tâb. I.1).600 400
2crûdes dillérents types des airnants penrvrneûts
sa.ns peltes Joule, particulièrement avantagerlx
pow
le
L
5
Actionneur linéaire
Armants perrnanmÆ et actionne rs plataires Tab.l 1 intérêr des aimants
un
moded
actionnement tinéaire lorsque saloi
deà
entrainemontdirccl,
des actionaeursutilisent
laaux à se
défomer
sousl'effet
d'un g:adientd,élergie
I.
5.1Actionneur par amplification
ddéformation
Pour
créerutr
déplacementli
propriété physique
qili
possède cenains exleme.L 52 Actonneur
à accumulation deCes
disposiriTsurilisenr
des mécaniques composées d'actionneursen
modebistable qui pemettent de
fixer
ou I'ensemble de l'actonEeùr.I,a
réÉtitior
d,un cycle defonctionnement
étâbli
oermet d'
les
petires
déformationspropres
de
l,actioDtcùt
&onolithiqùe [BEN 06].I. 53 Actionleur
hybrid€
Le dispositif réalisé par Hodac al
IHOD
98] constituée d'un mécanisme bielle maniveliepour le déplacement grossier. Le piston
sur
le
piston es! montéur
actionneruguidé pa. ùn
rail
le long duquel s'effectue la ûanslation. déplacementfin.
Ce demier est constitué d'uneflexible
commandée par une bobine électromag iquê mobile.
On
dit
d'ùn
sysrème
qù'il
po corùmande est linéaire.-
u(l eùenlal .ûcodètl.
Macbrnes plus conpactesmoteurs sont prerque tous à
2.
Meilieur
rendement
(actuelles
polll
lesd'énergie)
3.
Meilleures
accélémtions ûoteurs slmchrones ou pasrmants)
1.
Pius co(treùx dans le cas desmacffiÀ
à aimants terres rargs.2.
Risques
de
désaimanlation (irréversible):
limite
de tempâarulenraxt, courant maxt
3.
Dêfluxage impossible dans les MCC, délicat dans les MSArmtmts pehan?tus ?! d. tnnn?urs planaare:
Iæ système de macro/micro honnement possède un€ résolution
de
I'ordre
lum
et une répetabilité inférieure àAlpm
contreÉsolution
de 30pm
et une répetabilité de
j20
um
enfonctionn€ment macro
Une aqélération de 5G est
atteinteg.âc€
au
maclo rnanipulateur.f. 53 Actionneur ùltrasonore
L'actionnement par
irteraction
de contact,ou actiomeur
ultrasonoae, converti uûe otrde ûrlcânique parfriction
entre un élastiquevibralte
et une structure rigide. L'actioDnemertpar
roteractionde
coûtact est plussur
desapplicatons utilisant
des moteurs rotatifs. néanmoins des applications pour I ,actiofinement linéaile existent_L
5.4Action[eur
À parinteraction
de champs I-es actiorneurs par interaction{e
champs perrnettent un actionnement sans contact, entre lapafire
ûobil€
et flxe,
cequi
apoul
deÉdùire/éliminer
les effets dusà
l,adhércnceet
au frottement IBEN 06].I.
53.1Actionneur
électrostztiqueUre
disposition adéquate des permette de générer des forces suivant des axqs deutilisant
la
force
électrostatiquesonr
raremenrdéplacement
différentes.
Des
applic ons développ€es poul des systèmes mI
Pour
générerun
déplacemenrélectodes sur le rctor et
lc
stator du (Fig.l.9)-Ure
tension sirusoirdate est injectée entre lesbomes d'une paire d'électrodes. La
v
de la tension clée ùne tension électrique glissante lelodg du rotor.
IJ
déplacemert de I'ondeI. 53.2 Actionneur
électromagnétiquela tension entraine avec elle la partie mobile.
L'interaction de l'él
avecla
matière se taaduitpar la force de larentz
aire
Yamamotoet
al
IYAM
06]
disposeûtChapitre
I
Aimants pem-tanenls et aûionnéurs planaires
sur
un
conducteur).Les
effets del,
agneûsme peuvent apparaitre dans des applicationsd'actionnement sous plusieurs formes.
I.5,J,2.1
Force d,B rélucranceUn ,,rrcurt nraglêtique possede
fne
réluctance qui dépend de sa longueùr, de sa liecûon et de la perméabilité relative du marériau quf le compose. Si ce circuit possèdeun enhelet, la réluctârce
totâle es! la sorrùne de ra réructance du circuit composé du mafériau e! ale la aéluctance de
l
entref€r (Fig.I.1).Dans le moteur à réluctance,
qu'on
alimente une bobined'un circuit
magflétique, uneforce est créée et déplace Ia partie e de façon à minimiser la réluctance globaler du circuit.
Pour obtenir un dépl3cemeff, on ali séquentiellemen! les différemes bobines IBEN 06].
l
I
I
fig.t. I O ,eorce ae retuctance :ai
I.
53.2.2 Forced'irduction
Le
principe de lbnctionnementélectromagnétique,
b)
dans un moteur linéaire,moteurs à induction repose sru
la
variation dr_r chamD de la partie mobile conductricc. Une force éleclromotricepnrtie mobile, selon
la
loi
de Faraday, etva
créer un demier va créet à son!où
un champ magnétique dont leflur
s oppose à Ja variabon duflux
qui I i est imposé.La panie mobile de l'actionneur constituée d'une poutre conductrice. Le déplacement est
généré via pLusieurs bobines formant réseau triphasé gérérant un champ glissaûr (Fig.L l
l).
I_eprototype
ùtilisé
effectùe un ereur detlOpm [BliN
06].de
t2rnm
en avance et a500um en lévitalion avec uûe magnétique créé peù là pafiiefixe
âu sinduite
apparaitsut
I'enrculement de courantirduit
dan! cet enroulement.Part e mob,lÊ
Fig.I.lI
i,;*::
I - .._lChapitre
I
Atmanls
pcntlohcnts
actionnc urs plarairesL SJ,a3
Force det
aplaceElle défrnit
l'afiion
d'unei
magnetque sur un conducteùr de longleur parcouru parun coùrant éle{:trique résul{ant du de charges élecaiques daûs le condùcteur. Ell€
acit
perpen dic u lairemen I au plan
définipar
'induction magnétiEre etle coùrant électrique. Les travaux de
Williams
97] ont abouti à l'élaboration d,une platine deûanslati@ en Pour créer la force nécessaire à la ftanslation, des
aiea
s la partie inferieurs de table mobile et mis en resanalùre
bobine électrique à enroulement à six . La seation des aimaûts permanents est de
l2xl2
mm2 etleul
airnantâtion de 1.25 T.In
bobi électrique est dimensionnée pour des déplacements sttr uneCourse de 200rnm.
lévitation él€ctroûagnétique
Fig.I.l2)
en disposition de Halbachsort
collé€sBarre d'aimânts
Bobane plâne à six phaseô
Fig.Ll2 moteur linéairc à six utilisam une disposilion de Halbach 0ÀTL 971
L'utilisation
de
disposi[ion,de
Halbach,
rue
composzmtede
la
force
agitpexp€ûdiculairement à
l'axe
de Cette force pruduite un déplacement parasite suivantI'axe de lévitation. Pour réduire les d€ déplaceûent de la composante parasite cÉée, I_EE et
aimants
pemanents suivant
ure
disposition
appetée est de forme << U tr sur laquelle sont fixés deùr pâliers àal
[LEE
04]
proposenr d'assembler disposition trapésoidale. La pafiieair et dcux bobines électriques
tri
I-a disposition d'aimant permanant est collée sur la paniefixe de I'actionneur.
9
!
n êlêclntues
;tat r
Pour
évikr
l'étaped'
stiucnre
monolithique (bandel!,
aapézoidale avec une bobine à trois phases
Kube et al
IKUB
00] proposentur
actonneur utilisanture
) de 50x50x2mm3
et ayant une aimantation sinusoidale de 2 mm.Kube et al exploitent les deux et I'autre la
lévitaton
respectivemenld'air
est t0utefois necessâire pour lecourso de 50 mm en avance et 300
gm
lévitation.Armants peïnù\ents et
uio
neufsde Ia force de Laplace
créês l,ure
pour l.avanceax€s X et
Z (Fig.I.l4).
Un dispositif de guidage par paliers de la recdtude de la panie mobile. Iæ syslème a unellrlnt.
Irtt!
t
Le
guidage et la lévitation de 1oûg de la partie mobile et mis enIl
tâble est maintenùe en lévùation, àles électroaimams qui modifiee I'inten
l'axe latérale <
Y
>se fair enutilis&[
leFig.I.l4 linéaire à avance et lévitarion couplé
partie mobile se
font
avec des électroaimants disposés lc avec lerail
fenomagnétiquelié
à la parriefrre
(Fig.I.ls).
hauteur fixé, par un contrôl€ de
couralt
électrique dans té de la force (Fz, -Fz). I-e cont(ôle de la Dosition suivantprincipe IBEN 06j.
Fig.L
l5
eur linéaire en iévitation électromagnetiqueCes actionneurs possèdent des di importantes, Shurov er al ISHU 05] ont déyeloppé deux dispositifs miûiature (qùelque cenû )
(Fis.I.l6)
:.
Le premie. ùtilise des microbobine à pour déplacer un aimant.. IJ
second est actionnépar
une réalisés par sédgraphie.Cùapitre
I
l,es
prototypescoùar6
de
1.2
A,
Le deuxième actionneur_ développés premier actiIt
uùe atteint 1aff''"^"'^"""'-.-'
!-ig.I.l6 électrornagnétique linéair"
roiolut*"
tSffU O:lL'utiiisation d'une
sfucturelifhique
IKUB
00]
s'avèretrès
intéressant Dour des applications miniature, en effet plus les dimcDsioûs des aimants permaneDts est téduite Dlùs itssort
difficile
à manipuler et donc à assemI-es travaux de Tropfer et al 041 permettent de réaliser dos sfuctures monolithiques 50x50x0.5
mm'
avec une aimantâtionl.
I T, ce qui montre I'avantage de ces structures pour desactio{neùs
miniatùes. læs
derlxiers
actionneursIWIL
97] er ILEE 04], utilisent
desdispositifs
différentespour
l'avancelévitation ce
qui
implique
un
encombrement plus urqrortant compare aux solutions qui une même induction,[KUB
00] etIMOL
9?], pour I'avanceet la lévitation.
Ces acti sont adaptésà
des applicationspour
de déplacemeûtactionneurs linéaires, mais leÙÎs implantations
ort
Imelinéaires par une composition de
influence sur le comportement du di
itif final
[BEN 06].L6
Actionneur planaire
Dans cette partie nous nous aux différentes solutions possibles
pow
réaliser unt
d'accroitre les colrrses des actionneurs sont doncdéplacement planaire. Des solutions utilisées. Deux modèles sont produits
'
Iæ premier est monoiithique et est iné aux déplacemenis dans des applications optroniques.Iæ
dispositif
a un espace de travailde
20x20 pm': pour unetaille
du disposirif desûxylxls
mmt.Quant au deuxième,
il
est plus ori pour le déplacement d'échantillons dans I'enviromemenrpossède uû espace de
ûavail de
180x180 pm2 pour une3
des microscopes à
fotce
atomique.Atmanls pcmun?ms ct ttctionneu$ pla@ircs course
de 60 mm et
sont actionnés avec dosune vitesse
de
l0
mm,/set 0,5
ûn/s
pour
leClûpitre
I
Atûmnts pefnane!1set octinnneurs plafuaires
Fig. I 7 Actionneu. planâire CEDRAT
L6.1
Actionneur planaire
àÎs
permanents
L'élecromagnétisme est une a solution
qui
permet de développer des dispositifs de positionnement en lévitatioû sans I-es paliers magnétiques à aimant p€rmanant pe.mettentuee lévitation
passiveoeur
fonctione
nécessiteaucun
appon
d'énergievenant
delbxtérieur,
comme
les
palier$ues actifs,
ni
un
refroidissementcomme
les
D.li€rs supraconducteurs) de partie mobile, pâr les élecûoaimânts sont utilisés pour des paliers actifs (lqs paliers actifs sont des dont le courant est asservi pour maintenil la partie mobiledu circuit magnétique dans une p.srtion fixée. rls ont besoin d'un apport d'énergie pour fonctionner.
Pour
alimenrer chacun des acti conslituanlun palier acùf.
il
faul
unealifientaùon
depuissance,
une
commande etde
position). Des dispositifs
élecrromagnétiques de dimension importante pour le planaire ont été développés par divers laboratoire.(b)
Fig.I.l8 Diverses
ô)
.)cation de strucrure (riangulaire élecrromagnérique
Pour créer des déplacements sui 120 (Fig.I.l8.a). Chacun est constitùé
d'
ant un plan, GU IGU 03] dispose trois moteurs linéaires à
solénoide à I'intérienr duquel se troùve un aimant lié à la
paflie mobile. La
variaton
du courant s le soléroilde induit le déplacement de l'aimant et donc lapartie mobile. Cette partie créée des laiion suivant le plan (Tx,Ty) et lâ rotarion autour de
I'axe
Chapitre
I
Arnw rs
wnancult
eI aûionneufs plaraifcsZentner
[ÆN
04]
utitisent moteurslinéaires, avec
des aimarts
Dennanents otrdispositions de Hatbach pour les translations suivant
le plao (Fig.I.tg.b).
l€s
systèdiesdéveloppô
p
GU et
Zenhrer sont osés de deux dispositifs distincts,ull prcûier
pour la
Molennar et al
[MOL
96] nrettent au point ùne solutionlévitation el un second pour le depl
couplant les fonctions. Cette solution est nommée
dispositif
de lévitationet
propulsion. Chaqueélectroaimants placés de
pafi et d'auûe part
dela
partieniveau
de
I'entrefet est
alo$
exploitée
pow
créer
lesmoteur linéaire est coûstirué de
mobile. L'iûducton
magûétique audéplacements plaraire IBEN 06]. L'électromagnétisme est une posihornement en lévitation (sans dii(ensionnement impotante.
L'inteiaction
enre la
sowce d]inductionet un
conducteur étant mutùelle. Sprengeret
at ISPR 981 utilisenr une sourced
inducd]rn fixe et conducten, mobile pour lerùactionneur
(tslg.l.lg).
L€s aimants sontfixés
surun
support métallique.La
bobine est enroulée sur unprofilé
carré etcteÙx dotrt les
dimensionsd'avoir un faible entefer
enter
la
bobine er
I'aimallt
permananlla partie mobile est muniedf
paliers à air ce qui permer sa lévitation.solùtion
qui
permet de développer des dispositifs de ou le positioûrement planaire. Ce sonl généralement deFig.L20 planaire à aimarts permananrs fixes ISEF 9El
L'utilisation
de paliersà
airl'axe
delévitâtion
permet d'augmentetla
capacité de chrage de lapa(ie
rnobile. Saffert et al [SEF 98], adopte certe solutionpoù
la lévitation,âvec d€s paliers sui chaque coin de la rable (Fig.l.20). Le déplacement est cre€ par des moteur électriques àmobiles-Armanls perbtrnems ?r oLttonneurs planauer
Fig.I.2l
Acri plânafue à aimants peamarats mobilesLa
partie mobile
du
dif
de
Dejima
et
al
IDEJ
05]
repose
sur une
plaque ferromagnétique par l'intermédiaire de paliers àair (Fig.I.2Lb). L'acrion
combinée de l,aimantet de la partie mobile srrr
l'â{e
vertical. læ déplacemenrdu palier à air permet de creer le dépl planaire gst pour sa part qéé par des
linéaire utilisant des aimants permanats en dispositoû
opposée et des bobines électrique$ en
fi
de boucle IBEN 06].Une dsiposition de Halbach utilisée
poùr
ciéer des déplacement linéaire (Fig.I_22.a).tiliser cette meme dispostion pour cléer des deplacemeûrs
Compter er ai ICOM 0+a] proposenr
d'
plans. Pour cela,
ils
utilisent, sur la iefixe
du dispositif, uneÉpartjtion
dela
disposrion de Halbach suivant deux axes pour une matrice de Halbach (Fig.I.22.b). Iæs bords de bobire,savec les aimants pour
céer
les déplacernents sùivântlet
coisituant
la partie mobile interagisdeux aies. I-es perfbrmaûce du pro ne sont pas donnée,
er
raison de confidentialité .Eobllle
elecÛrqud p€nnfllerrts
Fig.I.22 Actionneur planai à aimants fixe disposés sur une matrice de HALBACH
Le
principe
d'actionnement repose sr.lrte
déplacementrelatif
entreuûe
tlarre d'aimants permanentsainiatures
et desban'e d'aimants et ces bobines génère
bobines électriques plates.
l-a
force de Lorcntz entre cetle mouvement dela
stlucfure mécanique. Ce dispositif de :'::e iel acIronne rs plaiolfes
moteùr, ce qui pemet à la skucture
d'
'ectuer des dépiac€ments linéaires dâns le plan(X
9,
maisarssi des rotations aùtour de I'axe iculaire au plan (0). Ce disposidf est capable d'effectuer
des déplacements linéaires sur quelque millimèûes.
trs
applications étudiées jusqu présent utilisent pour la translation et/ou la lévitation desparie
mobiles. solutions technolosiqù€s installées surL,es trâvaux de Trumper ITRU 031 porlent sur
I'utilisation
dela structùe
deHALBACH
tionnement.
L'actionneu
mis en place par Vy'illiams[WIL
poul
mettreen
mouvement unetable mobile (pour
|1!e dans des sYstèmes de déDlacemen971
utilise
la
dispositionde
Halbach application en photolithographie). Lalér'itation. Une structure utilisant
pan et
d'autre
de
la
tabLe (Fig.I.23itaton
est contrôlée par des électroaimants setouvent
deLe rôle
des électroaimants estde
stabiliserla
table eù moteurs linéaires est présentée parKim
[KIM
97]. I-ès moterus sont âssemblés dans une stlu caftésienne (Fig.I.23).l€s
dimensions des conducteurs électriques permettent de générer en position deux composant€s de la force :ion et,
L'intensité
du courant esr limitée ralson dela
dissipation par effet Joule, cequi
crée une061
élévation de température dans le di
if
IBEN.
Une composante esl utilisee pour Ia.
la deuxième pour le déplacemeDt..t,
-supporr
captèuc....
U
|derturcr*rÊ Y-Rxt
errèro'errêj(
- -ç-.i,, -l
'P'!li
+r
Ê:'
Mi,ors+
oispodion. deHâbach--Bobiæs
..
'l.
.1
.Ë:illi:,
_cts
-.1
Fig.I.23 âctionn€urPouI
repoùsser cette limite, d'adapterl'actionneû
deKIM,
en{Fig.L24) ce qui facilite l'évacuation
positionnement planaire différents.
utilisé.
ll .
électromagnétiques en avance el léviâtation [KIM 97]
et
al
IHOL 00]
proposent une solution permettaûtt
les moteurs linéaire sansun bloc d'hùile
reftoidiela chaleur générée.
Les travaux de Jung et
al
I 051po(ent sur
la
compaEison entredeux
systèmes-]
É
I)
-1
!
I4
-t
I
II
I I l IAimanrs permanents et aclionbeurs Pla@ùes
Le calcul do
la force
généréc structwe ferroûa8nétique gntoure çesaimants devient zùors plus
complele
que lorsqu'uneLe calcul de la force entre aimant-aimani ot
armaût-bobine
a
été
larsement
discutés
IALL
I0]IROV
l0].
Ce
calcul basé
sur
l'élergie
Ce calcùl analFique en 3D est évidemment plusdifficilc
magnétostatiqueet
la tbrce dÊque celui en 2D.
Le
calcul et plus à cause des intégraûons successives. Dans ce qui sùit' noùs âllons voû les grandes lignes de méthodologie.I.6
Conclusion
I-es actionneurs planalres sont domaiûes vastes, dans ce chapitre, nous avons présenté un état de
l'ârt
sul les aimants et leùrs caractéristiques physiques, ainsi que les différentsq?es des actionneurs Planalies. quelques réalisations, les avantages et le's inconvénients
vieà-vis
de la stabilité, ducoût..
.etc.Dans
l'étude
suivante, c'estdire
le
chapitre suivant, nous proposerons des modèles force magnétique apptiquée sur la bobine rectangulairo, I-e aralytiquos, permettant de déterminorcalcul est basé sur
la
subdivision d€ bobine en plusieurs conducteurs. Chaque conducteur est représetté par ses dimensions et physiques. I-es forces magnétiques en tout pornt cecréés Dar la contribution de toutes les autres barÎes'
bobine est equivalent à la somme des
Calcul
aûrnnt
ennels des Jor.es
.! M|era(\tun\
ente
leset aimant-bobine
Calcul
trid
mensionnels
des
teractions entre
forces
d'i
les
aimant aimant
et
Calcul lidim"nsionneh
Io!!:!J!49!gpns
entrc les aimant-aùnîntet ainant _bobiae
Calcul tridimensia
desforces
d'interactions
entre
aimant-
hobine
r
ectangulaire
II.1 Introduction
Iæ
calcul dela
force Eén&ép porles
aimants devient alors plus coïnpl€xe que lorsqù'une shucture ferromagrétique ces demiels. Le calcul de la force entre aiûrant-aiûa|ltet
arrnant-bobine a été largement di dans[AlL
I0][ROV
10]. Ce calcul ba,sé surl'énersè
magnétostatique et la force de Lorentz Ce calcùl aoalytique en3D
est évidemment plusdifficile
e à câuse des intégrations successives. Nous allons voir les
que celui en 2D. [æ câlcul et plus grardes lignes de cette méthodologie.
Dans
ce chapite, oû
va des expressions tridimensionnellespour
le
calcul
desfoi:c€s d'interactiors entre les aimants et les bobine de forme rectangulair€.
IIJ
Modèles
coulombien
et a
Pour I'observateùr éloigné, le oment mâgnétique est une sou.ce bien détlnie avec deux repésentations possibles, une représen ion polaire et une rcFésentâtion ampédenne (Fig.II.l).
In
spfe
pârcourue pâr un courant réalisenroment.lf
=
L5
représentation arnpérienne, alors qùe lela
représenationcoulombienre
selonpoT
=
qTÉ
lesdipôle
magreriquet+q.-q) en
consrid€lrx représentations sont équivalentes
didension ca€ctéristique du moment (
lors qùe
l'on
se place à une distsnce grande devartle
Coulombien
dipôle
1..
ull.,
"l
a-q^
>>
R,/
>>
,48)Ampérien
splfc
Cabul tridimzniionrcIs d'inrcruL1wns
c
trg ks aûat\-oimanr et aimant -bobtrp Parla $éthode
ampérienae,I
est rcmplacée par rme nappede
cowans
qur ô'eûoule autou{ de I'aimant (Fig.tr.2.c)O[
les appelle coulants amperieûs, L,aimant peutalon
êaeassimilé et calc+é
co!fte
utr solénoideK'
=
Jo/ ttopar uæ densiré linéique de coùam [YON.D3568]:
(tr
1)Quard qn
ûavailo
à partir du o ampéden, le champ d'excitarionH'
ne joue qu'unrôle
sccondaire.
Oq
l'évalue
facilement aiBâDtations sont rigides, conyiennertpa+ir de
B'.
Ces
modèles,qui
considàent
que
le,
iemetrt pour les aimaûts teres
nres.
:
0-l
t
4oïnale localeà lâ furface (extériêure)
densité de couranf surfacique : .,1="
,t-l
^
t
Wti"
I ..J*ë:d* ': ,; :' tc,i"=M
t
fr
(b)
Eg.IL2 lâ distribution de et la répartition de courants a$périens.
i.ond d- -
a.n'..-.rii6
d..E r'r.d{.dor!
r
[s6
â, d,..bP,i
Fig.F.3 Etude d'tln cylin&e révoJution ùniformément aimatrÉ [YON.D3568]
on
se prgpos€d'illuster
leslce champs magpétiques créé,s dâns
udformément
aiFanté (Fi9.tr.3,a),H'
polaire.Il
s'agit plors du champgl
vis-à-vis €t sùbposées po.teuses desétroncés datrs les parâgraphes précédents en
éirdiant
l'espace par
un
cylindre derévoluton
supposéisolé
etle
champ principal quand on opère àpaftir
du modèIeqéé
par les deux faces terminales de I'aimant placé€ssurtâciques de pôles IYON. D3568.1:
ri
(aJ
Chapnrc 1l
!l]:l!!la!g::Sll-!:1"!Jttces
d nlteractions entre les ainant-ainant et ainmû -bobùæ L'exemple traité indique clairement que les deux ûodèles mènent à des champsB,
etH,
distincts dans l'aimaût. Les deux vecteur en tout point de la matère est don!ée:F'(i):
-
sidd(u'(.î))
Ê'rn =,at@,6;y
(n3)
(tr.4)
Fig.It.4 Notations utilisées pour le catcut du
champ rnagnétique des courants dans le vide Fig.ÏI.s Notations utilisées lmur le cslcul magnétique dt à nr volùme aimantédu chanp
L'existence de distribution de
couranrs supposée connue quelcoûqueJ(r')
entjaîne laprés€nce
d'un
chzùrp d'induction magnéûqueB(r)
en chaquepoint
M(r)
de l,espace environnant(Fig.tr-4), donné par 'expession suivante, issue dÊs ftavaux d,Ampère et communément appelé€
loi
de Biot et Savart [YON.D3568l:
Êr,t=fr!&,sffiL
Dans cette expression, I'inté81âle est étendue à tout le volurne oil circulent les cou,-ants.
Imaginons, un volume aimarté
(r'),
dont l'aimantation J(r) est supposée connue en chaqre point et un observateurM(r)
(Fig.TL5). On suppose I'observateur situé d,abord à I'extérieur de Ia mâtière aimantée, donc dansle
vide.
Chaque élément devolume
dy,
se comporte colllme unmoment élémentai.e
'YON.D3568l
art
=
je)a,'
/po
(tr.7)læs
résultâts générauxâtorcés d,ms les
paragraphes précédenrsétant
applicâbles ausystème, le champ d'induction B(r) l'u par l'observateu dérive à la fois d'un potentiel scalaire
U,(r)
et
d'u!
potenûel vecteurA'(r),
avec[AII
l0][
YON.D3568]:u'{ù--àuçe#0,
f,@
=
+1il,,b!!!.!Lau'
On
démontre facilement queles
intégrales peuventêtre
remplacées parles
expressionsmathématiques suivantes qui teprésentent dos potentiels scalaires et vectoriels
[YON.D3568]IALL
101:
(n.10)
gr.6)
(tr8)
(tr 9)
Chllpitre caù:ul tidimensionners des
Jorces d'inleracùotlJ enrre r,e!
anuit-aiûent
et aimant -bobineÂ'
@
=
*
1fi,,
i#
ot'
+
!!t,,
ffi
av,
(tr_r
l)
Pour calculer
le
poEntisl
scalaire d'où dérive le champ d,excitation, on peut uritiser laloi
de Coulomb en remplaçant la distrjbution d,aimantation par une distdbution de pôles magnétiques
fictfs
comprenant [YON.D3568] I.
une répartition volumique de pôles avec une densité :p'
=
-diu(i)
.
unerépa{ition
sùrfâcique de pôles avec une densilé :"'
=
j.n
u-l2)
(û.13)
II3,l
L'aimad
aimanté àz-direction
on
considère une plaque de centreo,
de dimensions 2ax2b uniformément érectrisé avecule
dqrsité suxfacique o. Cette
plaqùe
engenùerun champ magnétique à ùûe distance de la plaque,II3
Calcul
de champs
magnétique
tl,une
surface
rectangulaire
chargée
par
I'approche
Coulombienne
Fig.tr.6 Modet de base pour le calcut rridimensionn€l
par I'approche coulombionne
L'objecrif
ici
est de proposer des solutionsà
la
base de potentiel scalaire.scalaire V est donné pai l'équalion :
v =
-:-
tt-
lds
dS=
d.x'. d.y'R=lti-itl
v
=+f
-l!
--==#=
ar,ay,
anpo- - d rb,!(x-x'
t, +ly-y,)2+(z_z,\,l€
poteniel
(II.l4)
(tr.1s)
(tr
16)(tr
18)Il
existe plusieurs méthode d'intégration, parmi lesquelles le changement de variable. Dansce sens, en pose corùne \ariables secondaires:
Chapitre
Il
Cabul tidinên:ionnzts dnt"faùon:
fitrc
lcs ëirun!-aimanr ?rana
-bobiieU=x-x',
v=y-y'
$-20)
W=z-z'
On
(x',y',z')
el (x,y,z) sont resperri ApIèalt
changement de variv=fit!,tÇffi*auav
L€
caluFmalytiqre
del'é!
foûction I1VZ qt|i existe au logiciel de çalcul
fomel
MAPLE
afin do calculer les terne.!la simplification; \11.22)
ui
1"'tw'
-
w.ta-te!\
(tr 23) rl',i'
;€
ii
C ab ul t ridirneùs ionae I s rces rt iûtenctiona entre lzs sihnùrt_aimat!
et aimant -bobiw
Pour tr+cer les lignes des mBgnétiquos et les inductions magnétiqueô qui ont été créé
par laplaque cbargé, nous alloûs cléerun plan
cané
d'étude au-dessus de la plaque chargé. Ce plan
se
ûouve à
u{e
distance dez
=
0.1 rq.
les figuresci-dessous éclaircissent
les
variations depotintiel
magnptique ainsi que le et l'induction magnétique@g.tr
7).IL4
Calcul
Çechamp
et
rqagnétiques
créés
par
deux surfaces
rrcfân gulailes
chargées
tr.41
L'âimaqtaton
est orientéeI'a!e
ozl'aimant
f,errnaûant peutDans l'Fpploche
&ctangulaires identiques. euand
l,
ion est orientée vers cbegée positivpmeit et l,antre chargée négqtivement (Fig.tr.g).le
tlatrsforûref,er
deux plaquesI'axe
oz,
une des deux plaquesFig.tr.8 Modèle de
i'
permanent par 1'approche coulombienneLe potÊn]tiel scalaùe, issu touj
ainsi
IALL
O8]qCLLl0l:
de l'équation tr.14, sera expfimé pour I'aimant pennanett
Le champ magnétique
H
est ûoujouls à partir dù gradienr.L'hduction
est expdEéêpar :
B=pn.ll.
airà
l'inrégration,la
ibutiotr de la deNité deflùx
magnétique dans le système decoordoû[ées d'uF
aimalt
cubiqte ai daFs ladtection
z-positive e.st égale àIALL
09] :8,
=
-axLo
t]-o
Ei=o(-
1;i+i+rt;o,
v
=
ùLtr_"{-Dt
J:,
I:"ja;æ
-Y)
-u)
uv.
(tu)
(û.25)
Q.2A
$.27)
(tr.28) (rr.29)(n.30)
8"
=
*xloxjFoti
=o(-7)i'i*k
tos
B, =
+2L"2j i"ti=
o(-
1) i+r+r.'RW
Où atanz est $nq fonction arctan
U
=(x-h,)-(*7)iq
v=(v-l?)-(-Djb
-
(-1)"c
cstorientê
'aimaûfation estD,
I:ol:,
Dr
l:"f"
ions dela
densité ve est égale à :=oXl-o(-1)t+l+t
EI-oGt1i+
t+*
1onoXâ=o{-t1'*i*u
1o,
'aimant cubique est ai=o
Xl=o(-r)i*j*ttog(
=oxl=o(-1)'+./+*
oXi=o(-1)!*'**
lo
Fig.tr.l I L'aimant Calcù triàimêraioù]takw=(z_tt")
IUzL'
Quand s'obtiena; L'aimantatioaI/
=
1Y1
^1v
-àri=o(
tÆs di.ection xB,
=*xl="X
4
=*xt"
4=*Xt"
Quant à B"=*Xt"
&=*xt,E
È"=*tlox
mtre let ainoû-airnant et aùnat t -bobinz
(tr.31)
ox e{ oy
l'a*e
oxet
oy
(Fig,n.ll),
lespotertiels
scalates(Ït.32)
da'd./
(rL33)h y) - 4
e
Dk)" + te - h,)-
z')2mag4étiqlle de
l'aimatrt
cubique est aimanté dansla
(rr.33)
gL34)
(tr-35) dars 14 direction y-po6itiye, les cxpressions
s'éc.iv€rt:
(rr.36) (r137) (tr_38) et lâ dire.tion de I'aimmtation
v)
u)
Clupitre
II
Calcyl tridinensiohnels d'inleractiorls entreles airn<nl-aima et ainan
(Fig-
.13). læs polarisatioN J et J'sgût 2a
x
2bx
?c et sa polarisatioE estaimaût au ce4trq 02 (a, Ê, T), avec des
Chapitre
II
Fig
læ
calcul de la forced'interactrons en|rc les aiman!-aimant et
aima
-z
aimants avec aimantation parallèle
ar les aimants devient alors plus demiels.
I-e calcùl
dela
forcestmctue
ferromagnétiquelaryement discuté dans
[ALL
I
091.Considérons deux ai de gueur axiale - axe peçendiculaire au plan x-y
- L,
sépflésd'!ûe
distance rl2, d'aiMt
et , de sections S"l et Sa2, contenus dans un plan x-vcoûlqe
le montre la Fig.[I.14.
Fig.II.l4
de deux aimants longs [YON.D3568].L'énergie d'interactotr avec un ième aimant de polarisarion J, est :
dw
=
-j2É$v2
L'énergie
d'inte€ction
entreélémqltairgs des charges dù premier L'énergie magnétostatique entre deux
(rr.39) aimants s'obtient en calculant
I'intégrale
des énergiesEoumis au cbamp du deuxième aimaût [YON.D356Ej.
est
IALL
10]:t
=
#l;="râ=.
(-r)e+s
!b2
!!L
t!'^Ta"
avax
av
complexe que lorsqu'pne entre deux
aimanb
a
été(tr4p)
À=
Le calcul analyique en 3D est plus
difficile
que celui eû 2D.À
rirre d'exemple(u)2+(v)2+(w),
Chapttre
I
C alc u I I ridinens i o tuek
forces d'interact{a,it entre ler
aimaat-aina
el aùnantraÉdcment
avec
le
nombre
dI intégration értut impossible, er
Youet
[Akoun.84], ont travaillé sur les p.emiàes exprcssions analyiquesPar
I'utilisation
du logicielàdire
, les variables U,y
etl/
seront.s=a+(-1)I,4-(-1)ia
T--P+(-DeB-çDjb
u
=f
+
(-L)sc-Gr)kc
À partir d'énergie d'inreraction, F
=
sqàdtl)
Pour les lrois composantes de
ro.,a
=
#xtoxi="xi=oxtox;=
Or
tt],=:(v, -
w2)
tn(R-
u)
+
uv
kl
$y
=!(12
-
w2)ln(R
-
y)
+
urln
1ûz=
-UW
hr(R-
U)-
ttzyln(R
-tr5.1
Exernple de calculLe
dispositifchoisit
est compo orienté suivant z-direcrion (Fig.I].l -5).,i"i
Fig.
.15Dispositif étudié :Pour
analyserles
interactions magnétique, I'r-rn desdeur
aimânt estdirection. I-es signaux des forces sont
sonl afnchés à la figure Fig. tr. 1 6.
.
Beaucoupde
personnes pensaientque
lat
êltefaite
parvoie
numérique. GillesAkoun
et JeârF prablèm€, etils
ont réussi à résoudre le calcul entorces en 3D en 1984
IALL
l0].
le calcul se
fait
par le changement des variables, çeFenl exprimées :
les composantes de forces sont obtenues:
(q'
û.
G!,
, on auraIALL
10];\àioeL)i+
j+k+t+P+q .1P e,y p)-n+vwarctan(ffi)+!nu
-
0
+
uw arctanffi)
+! nv
+{rarctanffi-Rw
dE deux aimants identiques
-
d'aimantationde
1. -,7
,/-
- - -,71i
t,i
almants de dimensions (0.01 x 0.01
i
0.01) m.entrq
les
deux
aimantsque
ce
soit
énergie ou dansce
sensI'aimant
ci-dessus se déplaceCahul tndimensionhels des forces d'interacions ektre les aûrarTcrimont et aimant
bobiit
I
.ta
'ul
0
0.01,t'l
b) H=0.02 m
Après la simulation, on remarque qùo la force suiyant la dkection
x
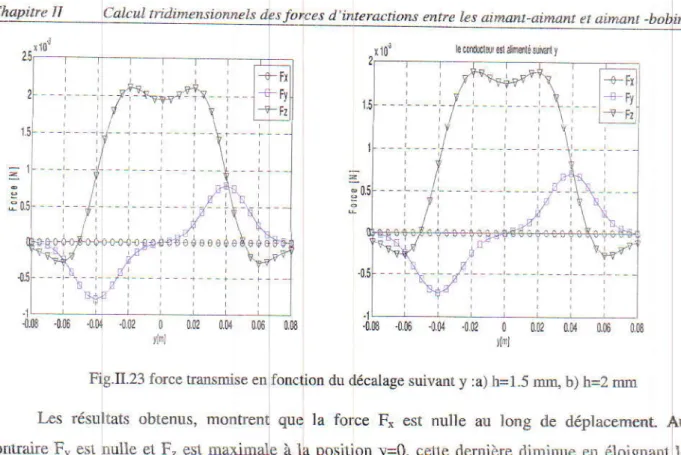
a une folme siùùsoidale dont la partie positive se tlouve au sens ûégatif du mouvement. Ce phénomène se répè@ mais dans le sens opposé à cause de la symétrie de déplacemert. Par contre la force suivant l'axe'oz'
atteiûtla
valeu
ûaximale lorsqùe les deux aimants sont en quadratue. Quant à la force suivant I'axe'oy'
esttoujours nulle.
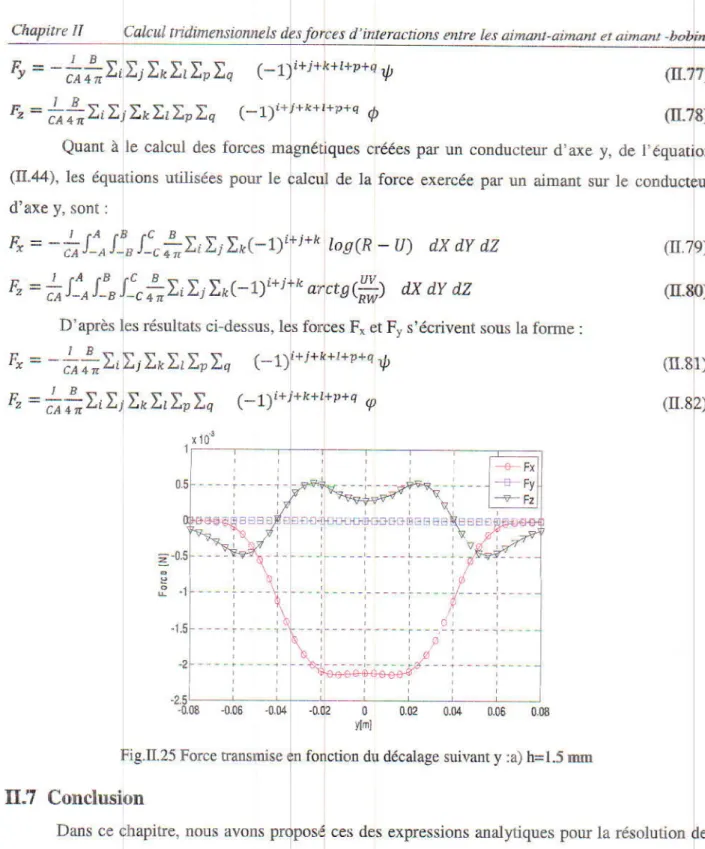
II.6
Calcul
desforces
d'interactions
entr€
un aimant
cubique
et une
bobine
reclangulaire
Dans l€ chapitre
I,
nous avons citÉ lcti différents tlpes des actionncursparni
lesqùels le tj,lreD€ compter. Dans ce
tjpe
les conduct€urs sont placés du coté oul'induction
est la plus importantÊ. ce quipemet
de mâxinliserI'effort
obtenu. De plus, un conducteur sera tout aussi efhcace sur un aimantsi
on réduit les diûensions dù systi:me,et
ce typed'actionneù
marche déjà très bieû àl'échelle macroscopique dans les moteurs électriques et les haut-parleurs par exemple. Comme on
ven-a plùs
loir
on peut augmenter considérablement les deûsités de courant dans les conducteunmicroniques,
et
par
conséquentles
interactions entreaimant
et
courant peuventdevenil
trèspussaût€s.
Le calcul analytique reste possible pirur des interactions enfte des aimants ou des couian{J
mais I'adjonction de