Pose Error Effects on Range Sensing
Texte intégral
Figure



Documents relatifs
From our point of view, the idea of separating a liquid film into two fictitious phases that exchange matter at the vicinity of the contact points between corrugated sheets is a
In this work we define a semantics for IS based on Timed Automata (TA) and we show that such model yields to a complete framework to compose, verify and execute interactive
We finally, provide some new sharp bounds for the first Dirichlet eigenvalue of planar convex sets and a new sharp upper bound for triangles which is better than the conjecture
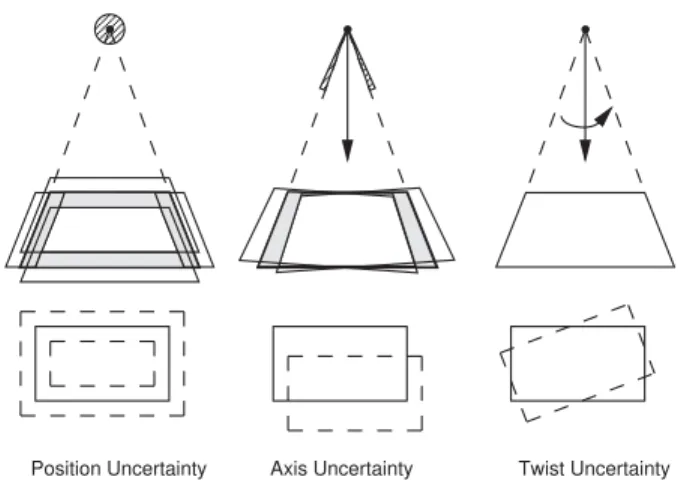
On the right, the ambiguity in the inferred pose of the true camera is shown: its position can lie anywhere on the circle that is centered in the fixed-axis rotation axis,
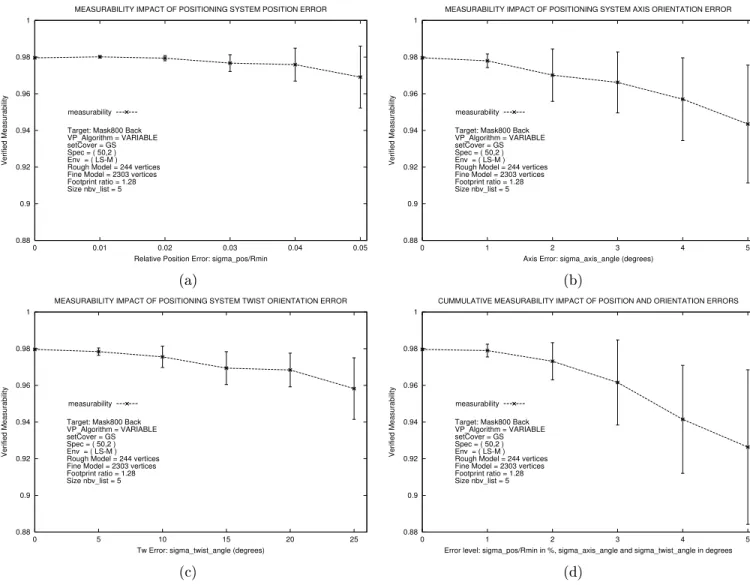
8 shows the average number of sensors detecting the target and the maximal number of outliers in the top plot, the average subpavings areas in semi- log scale in the middle plot and
Tout d'abord, notre étude prospective dans un intervalle relativement court ne comprenait qu’un petit nombre de patients ayant été programmés pour des
Poses are computed from the model using approximate nearest neighbor matching of the descriptors [40], followed by RANSAC filtering of the correspondences between the query image
