Contributions to sutured monopole and sutured
instanton Floer homology theories
by
Zhenkun Li
Submitted to the Department of Mathematics
in partial fulfillment of the requirements for the degree of
Doctor of Philosophy in Mathematics
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
May 2020
c
○ Massachusetts Institute of Technology 2020. All rights reserved.
Author . . . .
Department of Mathematics
March 31st, 2020
Certified by . . . .
Tomasz S. Mrowka
Professor of Mathematics
Thesis Supervisor
Accepted by. . . .
Davesh Maulik
Contributions to sutured monopole and sutured instanton
Floer homology theories
by
Zhenkun Li
Submitted to the Department of Mathematics on March 31st, 2020, in partial fulfillment of the
requirements for the degree of Doctor of Philosophy in Mathematics
Abstract
In this thesis, we present the development of some aspects of sutured monopole and sutured instanton Floer homology theories. Sutured monopole and instanton Floer homologies were introduced by Kronheimer and Mrowka. They are the adaption of monopole and instanton Floer theories to the case of balanced sutured manifolds, which are compact oriented 3-manifolds together with some special data on the boundary called the suture. We construct the gluing and cobordism maps in these theories, construct gradings associated to properly embedded surfaces inside the balanced sutured manifolds, and use these tools to further construct minus versions of knot Floer homologies in monopole and instanton theories. These constructions contribute to laying down a solid basis in sutured monopole and sutured instanton Floer homology theories, upon which we could develop further applications.
Thesis Supervisor: Tomasz S. Mrowka Title: Professor of Mathematics
Acknowledgments
It was a wonderful journey to MIT. The lovely city, the amazing people, and the friendly and active atmosphere here all make it a paradise to study and research in math. Looking back, I cannot achieve thus far without supports and encouragement from my advisor, my friends, my family, and other people around. It is my pleasure to dedicate these acknowledgments to them.
First, I wish to express my sincere appreciation to my advisor, Tomasz S. Mrowka, who leads me to the field of Gauge theory and offers enormous encouragement and guidance. It was always a great pleasure to talk with him when I can always hear about new math, inspiring ideas, and even the philosophy of life.
Second, I would like to warmly thank the geometry and topology community at MIT and in Boston. People from across Boston communicate quite often, and it feels as if every day, there is some news happening around me. In particular, I am grateful to John Baldwin, Mariano Echeverria, Larry Guth, Jianfeng Lin, Yu Pan, Paul Seidel, Matthew Stoffregen, Yi Xie, Boyu Zhang, for countless helpful conversations and discussions.
Third, I would like to thank my friends in and outside Boston, with whom I can share my excitement and happiness in highlight times and from whom I receive companions and relieves in hard times.
Finally, I want to thank my parents for their endless love and encouragement. Nothing would be possible without their support.
This doctoral thesis has been examined by a Committee of the
Department of Mathematics as follows:
Professor Tomasz S. Mrowka . . . .
Chairman, Thesis Committee, Thesis Supervisor
Professor of Mathematics
Professor Paul Seidel . . . .
Member, Thesis Committee
Levinson Professor of Mathematics
Doctor Matthew Stoffregen . . . .
Member, Thesis Committee
Contents
1 Introduction 11
2 Preliminaries and backgrounds 19
2.1 Balanced sutured manifolds and sutured manifold hierarchy . . . 19
2.2 Closures and monopole Floer homology . . . 25
2.3 Instanton theory and balanced sutured manifolds . . . 30
2.4 Marked closures and naturality . . . 39
2.5 Floer’s Excisions . . . 46
2.6 Basic properties of SHM and SHI . . . 51
2.7 Contact structures and contact elements . . . 62
2.8 Applications and other discussions . . . 79
3 Gluing and cobordism maps 91 3.1 Contact elements and excisions . . . 91
3.2 Another interpretation of contact handle gluing maps . . . 102
3.3 Basic properties of handle attaching maps . . . 112
3.4 Contact cell decompositions . . . 133
3.5 The construction of the gluing maps . . . 136
3.7 Duality and turning cobordism around . . . 144
4 Gradings on Sutured monopole and instanton Floer homologies 153 4.1 The construction of the grading . . . 154
4.2 A reformulation of Canonical maps . . . 160
4.3 Pairing of the intersection points . . . 167
4.4 A naive version of grading shifting property . . . 176
4.5 Supporting spin𝑐 structures and eigenvalue functions . . . 179
4.6 The grading shifting property . . . 187
4.7 Floer homologies on a sutured solid torus . . . 190
4.8 The connected sum formula . . . 199
5 Applications to knot theory 207 5.1 The construction . . . 207
5.2 Basic properties of the minus version . . . 216
5.3 Knots representing torsion classes . . . 222
5.4 Concordance invariance of 𝜏𝐺. . . 229
Chapter 1
Introduction
The celebrated papers [14, 15] by Donaldson around 1983 marked the birth of (math-ematical) gauge theory. In these papers, he studied the moduli spaces of a particular set of partial differential equations, called the anti-self-dual equation, which has its origin in physics, on some special bundle over a closed oriented 4-manifold. These moduli spaces lead to an invariant, which now people call the Donaldson invariant, and encode some information of the topology and the smooth structure of the un-derlying 4-manifold that could hardly be captured by classical tools prior to the introduction of gauge theory. Later, in 1988, Floer observed in [21] a wonderful re-lation between dimensions 3 and 4: For a closed oriented 3-manifold 𝑌 , the negative gradient flow equation of the Chern-Simons functional is exactly the anti-self-dual equation on the infinite cylinder R ˆ 𝑌 . This observation led to the construction of instanton Floer homology on 3-manifolds. Roughly speaking, the instanton Floer homology on a closed oriented 3-manifold 𝑌 is an infinite-dimensional Morse theory build upon the Chern Simons functional that is defined on the space of connections on a suitable bundle over 𝑌 , module the action of gauge transformations. This
infinite-dimensional Morse theory gives rise to a module over suitable coefficient rings, such as Z and C, and serves as a topological invariant of 𝑌 . For a cobordism between two closed oriented 3-manifolds, one can also study the anti-self-dual equation on the cobordism and obtains a homomorphism between the modules associated to the two boundary-3-manifolds. This nature of instanton Floer homology makes it be a p3 ` 1q-TQFT.
In 2007 and 2004, monopole Floer homology and Heegaard Floer homology were introduced. Monopole Floer homology was introduced by Kronheimer and Mrowka in [52]. The construction followed the same line as Floer’s construction but used another set of differential equations, called the Seiberg-Witten equation introduced by Seiberg and Witten [83]. Heegaard Floer homology was introduced by Ozsváth and Szabó and is built on Heegaard splittings, a somewhat combinatorial descrip-tion of 3-manifolds. Later, many other variances and related construcdescrip-tions were made, including the singular instanton Floer homology introduced by Kronheimer and Mrowka [48], Pinp2q-monopole Floer homology introduced by Lin [60], the knot Floer homologies introduced by Ozsváth and Szabó in [74], and Embedded contact homology introduced by Hutchings [37], among others. Floer homology theory has become a very powerful tool in the study of 3-dimensional topology and has many remarkable applications, such as the approval of the Property P conjecture (see Kron-heimer and Mrowka [46]), the disapproval of triangulation conjecture (see Manolescu [62]), and the study of cosmetic surgeries (see Ni and Wu [70]) and knot concordance (see [79, 31, 88, 13]).
Different versions of Floer homologies have their own advantages. Instanton Floer homology is most closely related to the representations of the fundamental groups of 3-manifolds; Monopole Floer homology has simpler analytical inputs and better compactness properties in dimension 4 than instanton theory, and is most closely
related to some geometric properties of the underlying manifolds; Heegaard Floer homology is the most computable one among all Floer homology theories. Besides, cobordism maps in monopole and instanton Floer homologies are more naturally defined and their naturality is easier to treat than the one in Heegaard Floer theory, while in Heegaard Floer homology, there are more algebraic structures associated to knots and links inside 3-manifolds, which leads to a more fruitful knot Floer homology theory than its correspondences in the monopole and instanton settings. So, it will be great to compare and combine the merits of different Floer theories when solving an actual problem.
Sutured manifold theory is another powerful tool in the study of 3-dimensional topology, which was introduced in 1983 by Gabai in [23] and subsequent papers. A sutured manifold is a compact oriented 3-manifold, together with some special data, called the sutures, on the boundary of the 3-manifold. The core of the sutured man-ifold theory is the sutured manman-ifold hierarchy. It enables us to decompose any taut sutured manifold, in finitely many steps, into product ones, which are the simplest possible sutured manifolds. Along the decomposition, some previously un-attackable problems break down into more approachable pieces. For instance, in [23, 24, 25], Gabai used these techniques to construct taut foliations for 3-manifolds that are not rational homology spheres and approved the famous property R conjecture.
The first combination of Floer homology theory and sutured manifold theory was made by Juhász in [38], where he introduced the sutured (Heegaard) Floer homology, on a special class of sutured manifolds called the balanced sutured manifolds. Later, in [53], Kronheimer and Mrowka introduced sutured monopole and instanton Floer homologies. The original monopole and instanton Floer homologies were defined only on closed 3-manifolds, so, to adapt them to the case of balanced sutured manifolds, Kronheimer and Mrowka first constructed some closed 3-manifolds, which they called
the closures, out of the sutured data, and apply the usual construction of monopole and instanton Floer homologies. They also proved some non-vanishing results for those invariants, which leads to a new and simpler proof of the Property P conjecture, and, combined with their later establishment of a spectral sequence from Khovanov homology to a suitable version of instanton knot Floer homology, proves the milestone result that Khovanov homology detects the unknots (see [47]). Furthermore, recently, Kronheimer and Mrowka proposed in [50] a possible human checkable approach to the proof of the four-color theorem, in which sutured instanton Floer homology also plays an important role.
Despite many significant applications already established, lots of basic aspects of the sutured monopole and instanton Floer homologies remain unknown. For example, here are a few questions to be answered:
∙ It is the nature of monopole and instanton Floer homology theories on closed 3-manifolds that they serve as a (3+1)-TQFT. Do we also have a similar property for sutured monopole and instanton Floer homologies?
∙ To construct the sutured monopole and instanton Floer homologies, Kron-heimer and Mrowka introduced the concept of closures, while those two Floer homology theories are invariants under different choices of closures. To what extent can we say that the sutured monopole and instanton Floer homologies are independent of the closures? Is there a canonical choice of a closure for a fixed balanced sutured manifold?
∙ The monopole Floer homology of a closed 3-manifold decomposes along spin𝑐
structures and the instanton Floer homology of a closed 3-manifold decomposes as the direct sum of the generalized eigenspaces of an action induced by any
properly embedded surface inside the 3-manifold. Do sutured monopole and instanton Floer homologies admit similar decompositions?
∙ How do the sutured monopole and instanton Floer homologies tell us topo-logical information about the balanced sutured manifolds? In particular, how are they related to the depth of the balanced sutured manifolds, the minimal depth of all possible taut foliations, and the Thurston norms of the balanced sutured manifolds?
∙ How can one possibly compute the sutured monopole and instanton Floer ho-mology of some families of balanced sutured manifolds?
The goal of the thesis is to present some of the work the author did towards answering the above questions as well as other related constructions and applications. The thesis is organized as follows:
In Chapter 2, we give a detailed introduction of balanced sutured manifolds and sutured monopole and sutured instanton Floer homologies. We also give an account of the development of the two theories up to date.
In Chapter 3, we constructed cobordism maps associated to a special type of cobordisms, which are called the sutured cobordisms and were introduced by Juhász in [41]. We also proved that a cobordism map associated to a product sutured cobor-dism is the identity, and such coborcobor-dism maps are functorial under the composition of sutured cobordisms. This makes sutured monopole and instanton Floer homologies functors from the sutured cobordism category, which are formed by balanced sutured manifolds and sutured cobordisms, to some single category of modules, and answers question 1 as above. We also give a new interpretation of the sutured cobordism maps just defined, indicating that the whole construction of a suture cobordism map can simply be interpreted as being induced by a suitable cobordism between two
well-chosen closures of the balanced sutured manifolds. Thus it is possible to make use of the good naturality of the cobordism maps between monopole and instanton Floer homologies on closed 3-manifolds. As a direct corollary to this new interpre-tation, we obtain a duality result for such sutured cobordism maps. Furthermore, along with the construction of the cobordism maps, we also constructed a special type of maps, called the gluing maps, which were first introduced to the context of Heegaard Floer homology by Honda, Kazez, and Matić [35]. The construction of gluing maps is interesting on its own, as we will see in later chapters.
In Chapter 4, we construct a grading on sutured monopole and instanton Floer homologies associated to a properly embedded surface inside the balanced sutured manifold and prove an important grading shifting property in the case when the balanced sutured manifold has a connected toroidal boundary, and the suture has two components. This grading shifting property directly leads to the computation of sutured monopole and instanton Floer homologies of an arbitrary sutured solid torus, and will also be useful in later chapters. In Ghosh and Li [27], the restriction on the sutured manifold was removed, and the authors offered a proof for a general balanced sutured manifold. This directly leads to an algorithm that is capable of computing at least some families of sutured handle bodies, which partially answers question 5. Question 2,3, and 4 are also studied extensively in [27], and the main results of the paper are summarized in Chapter 2.
In Chapter 5, we used the gluing maps and the gradings already constructed to build minus versions of monopole and instanton knot Floer homologies for null-homologous knots, which are the counterparts of the minus version of knot Floer homology in Heegaard Floer theory introduced by Ozsváth and Szabó [74]. We also used the grading shifting property to derive some basic properties of the minus versions already constructed. What’s more, we further extend the construction of
minus versions to the case of rational knots and prove a surgery type formula relating the minus version of a knot inside 𝑆3 with the minus version of the dual knot inside the 3-manifold obtained from 𝑆3 by performing Dehn surgeries along 𝐾 of large
enough slopes. Finally, we define tau invariants in the monopole and instanton settings, in correspondence to the one defined in Heegaard Floer theory by Ozsváth and Szabó in [73] and prove that they are concordance invariants.
Chapter 2
Preliminaries and backgrounds
In this chapter, we give a detailed introduction to sutured monopole and instanton Floer homology theories. We also give an account of the development of these two theories up to date.
2.1
Balanced sutured manifolds and sutured
mani-fold hierarchy
Definition 2.1.1. A balanced sutured manifold p𝑀, 𝛾q consists of a compact ori-ented 3-manifold 𝑀 with non-empty boundary, together with a closed oriori-ented 1-submanifold 𝛾 on B𝑀 . Let 𝐴p𝛾q “ r´1, 1sˆ𝛾 be an annular neighborhood of 𝛾 Ă B𝑀 and let 𝑅p𝛾q “ B𝑀 zintp𝐴p𝛾qq. They satisfy the following properties.
(1) Neither 𝑀 nor 𝑅p𝛾q have a closed component.
(2) If we orient B𝐴p𝛾q “ B𝑅p𝛾q in the same way as 𝛾, then we require that this orientation of B𝑅p𝛾q induces one on 𝑅p𝛾q. The induced orientation on 𝑅p𝛾q is called the canonical orientation.
(3) Let 𝑅`p𝛾q be the part of 𝑅p𝛾q so that the canonical orientation coincides
with the induced boundary orientation on B𝑀 , and let 𝑅´p𝛾q “ 𝑅p𝛾qz𝑅`p𝛾q, then
we require that
𝜒p𝑅`p𝛾qq “ 𝜒p𝑅´p𝛾qq.
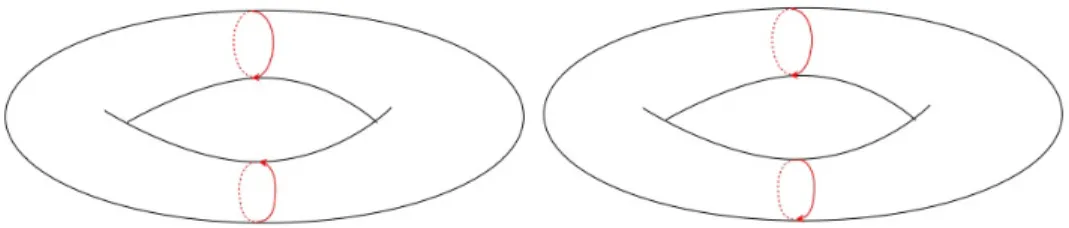
Remark 2.1.2. The requirement (1) in Definition 2.1.1 implies that the canonical orientation on 𝑅p𝛾q, if exists, is unique. However, the existence of a canonical orien-tation is a non-trivial requirement for being a balanced sutured manifold. See Figure 2-1.
In Heegaard Floer theory, when Juhász first defined sutured (Heegaard) Floer homology in [38], he required that the balanced sutured manifold to be strongly balanced (i.e., each component of the sutured manifold is balanced). In the monopole and the instanton setups, being strongly balanced is not required to build the Floer homologies. However, it follows from Corollary 2.6.16 that if the balanced sutured manifold is not strongly balanced, then the sutured monopole and instanton Floer homologies both vanish.
Figure 2-1: Left: The (red) curves with arrows denote the oriented 𝛾. The orienta-tions on the two components of 𝛾 are not compatible with inducing an orientation on 𝑅p𝛾q, so this is a counterexample of being a balanced sutured manifold. Right: After reversing the orientation of one component of 𝛾, we end up with a balanced sutured manifold.
Example 2.1.3. Let 𝐹 be a compact connected oriented surface with non-empty boundary. Let p𝑀, 𝛾q “ pr´1, 1s ˆ 𝐹, t0u ˆ B𝐹 q, then this gives us the simplest example of a balanced sutured manifold, where
𝐴p𝛾q “ r´1, 1s ˆ B𝐹 and 𝑅˘p𝛾q “ t˘1u ˆ 𝐹.
Definition 2.1.4. A balanced sutured manifold p𝑀, 𝛾q arising in the way as in Example 2.1.3 is called a product balanced sutured manifold.
Next, we recall sutured manifold decompositions and sutured manifold hierar-chies, which were introduced by Gabai in [23] and subsequent papers.
Definition 2.1.5. Suppose 𝑀 is a compact 3-manifold. 𝑀 is called irreducible if every embedded 2-sphere 𝑆2
Ă 𝑀 bounds an embedded 3-ball inside 𝑀 .
Definition 2.1.6. Suppose 𝑀 is a compact 3-manifold and 𝑅 Ă 𝑀 is an embedded surface. 𝑅 is called compressible if there is a simple closed curve 𝛼 Ă 𝑅 so that 𝛼 does not bound a disk on 𝑅 but bounds an embedded disk 𝐷 Ă 𝑀 with 𝐷 X 𝑅 “ 𝛼. 𝑅 is called incompressible if it is not compressible. A 3-manifold is called boundary-incompressible if its boundary is boundary-incompressible.
Definition 2.1.7 (Thurston norm, Thurston [85]). Suppose 𝑀 is a compact 3-manifold and 𝑈 Ă B𝑀 is a sub3-manifold of B𝑀 . Suppose further that 𝑆 is a properly embedded surface inside 𝑀 so that B𝑆 Ă 𝑈 . If 𝑆 is connected, then define the norm of 𝑆 to be
𝑥p𝑆q “ maxt´𝜒p𝑆q, 0u. In general, suppose the components of 𝑆 are
then define the norm of 𝑆 to be
𝑥p𝑆q “ 𝑥p𝑆1q ` ... ` 𝑥p𝑆𝑛q.
Moreover, suppose 𝛼 P 𝐻2p𝑀, 𝑈 q is a non-trivial second relative homology class,
then define the norm of 𝛼 to be
𝑥p𝛼q “ mint𝑥p𝑆q | p𝑆, B𝑆q Ă p𝑀, 𝑈 q, r𝑆, B𝑆s “ 𝛼 P 𝐻2p𝑀, 𝑈 qu.
Definition 2.1.8 (Thurston [85]). Suppose 𝑀 is a compact 3-manifold, and 𝑆 Ă 𝑀 is a properly embedded surface. 𝑆 is called norm-minimizing if
𝑥p𝑆q “ 𝑥p𝛼q,
where 𝛼 “ r𝑆, B𝑆s P 𝐻2p𝑀, 𝑁 pB𝑆qq. Here, 𝑁 pB𝑆q is a neighborhood of B𝑆 Ă B𝑀 .
Definition 2.1.9 (Gabai [23]). A balanced sutured manifold p𝑀, 𝛾q is called taut if the following is true.
(1) 𝑀 is irreducible.
(2) 𝑅`p𝛾q and 𝑅´p𝛾q are both incompressible.
(3) 𝑅`p𝛾q and 𝑅´p𝛾q are both norm-minimizing.
Remark 2.1.10. Condition (3) in Definition 2.1.9 does not imply condition (2). If we impose a new condition that every component of 𝑅˘p𝛾q has negative Euler
charac-teristics, then (3) does. However, in Figure 2-1, the balanced sutured manifold on the right is norm-minimizing (since 𝑅˘p𝛾q are both annuli which have zero norms)
Definition 2.1.11 (Gabai [23]). Let p𝑀, 𝛾q be a balanced sutured manifold. A product annulus 𝐴 in p𝑀, 𝛾q is an annulus properly embedded in 𝑀 such that B𝐴 Ă 𝑅p𝛾q and B𝐴 X 𝑅˘p𝛾q ‰ H. A product disk is a disk 𝐷 properly embedded in 𝑀
such that B𝐷 X 𝐴p𝛾q consists of two essential arcs in 𝐴p𝛾q.
Definition 2.1.12 (Juhász [40]). A balanced sutured manifold p𝑀, 𝛾q is called re-duced if any product annulus 𝐴 Ă 𝑀 either bounds a cylinder r0, 1s ˆ 𝐷2 so that
r0, 1s ˆ B𝐷2 “ 𝐴, or is isotopic to a component of 𝐴p𝛾q inside 𝑀 .
Remark 2.1.13. The two terms ’reduced’ and ’irreducible’ (See Definition 2.1.5) are not inverse to each other.
Definition 2.1.14 (Gabai [23]). Let p𝑀, 𝛾q be a taut balanced sutured manifold. A properly embedded surface 𝑆 Ă 𝑀 is called horizontal if the following four properties hold.
(1) 𝑆 has no closed components and is incompressible. (2) B𝑆 Ă 𝐴p𝛾q, and B𝑆 is parallel to B𝑅`p𝛾q inside 𝐴p𝛾q.
(3) r𝑆s “ r𝑅`p𝛾qs in 𝐻2p𝑀, 𝐴p𝛾qq.
(4) 𝜒p𝑆q “ 𝜒p𝑅`p𝛾qq.
We say that p𝑀, 𝛾q is horizontally prime if every horizontal surface in p𝑀, 𝛾q is parallel to either 𝑅`p𝛾q or 𝑅´p𝛾q.
Definition 2.1.15 (Gabai [23]). Suppose p𝑀, 𝛾q is a balanced sutured manifold, and 𝑆 Ă 𝑀 is a properly embedded surface so that B𝑆 is non-empty and intersects 𝛾 transversely. Let 𝑀1
“ 𝑀 zintp𝑀 q. Note
where 𝑆` and 𝑆´ are parallel copies of 𝑆 which are oriented in the same way as 𝑆.
We can define a new suture 𝛾1 on B𝑀1 as follows:
𝛾1
“ p𝛾 X 𝑀1q Y r𝑅`p𝛾q X 𝑆`s Y r𝑅´p𝛾q X 𝑆´s.
We call the process of obtaining p𝑀1, 𝛾1
q a sutured manifold decomposition along 𝑆 and write
p𝑀, 𝛾q p𝑀𝑆 1, 𝛾1q.
Remark 2.1.16. It is straightforward to chech that
𝑅`p𝛾1q “ r𝑅`p𝛾q X 𝑀1s Y 𝑆´, and 𝑅´p𝛾 1 q “ r𝑅´p𝛾q X 𝑀 1 s Y 𝑆`.
So, after a sutured manifold decomposition, the pair p𝑀1, 𝛾1
q is still a balanced sutured manifold, provided that 𝑆 has no closed components. In [82], Scharlemann introduced the concept of double curve surgeries. Then, 𝑅˘p𝛾1q can be thought of
obtained by performing a double curve surgery on 𝑅˘p𝛾q and 𝑆.
Definition 2.1.17. We say a sutured manifold decomposition
p𝑀, 𝛾q p𝑀𝑆 1, 𝛾1q
is taut if both p𝑀, 𝛾q and p𝑀1, 𝛾1q are taut in the sense of Definition 2.1.9.
A sutured manifold hierarchy is a sequence of sutured manifold decompositions p𝑀0, 𝛾0q 𝑆0 p𝑀1, 𝛾1q 𝑆1 ... 𝑆𝑛 p𝑀𝑛`1, 𝛾𝑛`1q, (2.1)
so that each p𝑀𝑖, 𝛾𝑖q is taut, p𝑀0, 𝛾0q “ p𝑀, 𝛾q, and p𝑀𝑛`1, 𝛾𝑛`1q is a product sutured
manifold.
Definition 2.1.19 (Gabai [23]). Suppose p𝑀, 𝛾q is a taut balanced sutured manifold. The depth of p𝑀, 𝛾q, which we write 𝑑p𝑀, 𝛾q, is the minimal integer 𝑛 so that there exists a sutured manifold hierarchy as in (2.1).
Theorem 2.1.20 (Gabai [23]). Any taut, balanced sutured manifold has a finite depth.
2.2
Closures and monopole Floer homology
The classical monopole and instanton Floer homologies are defined on closed 3-manifolds. So, to construct sutured monopole and instanton Floer homologies, we need first to construct a closed 3-manifold out of the sutured data. Such construction was introduced by Kronheimer and Mrowka in [53].
Let p𝑀, 𝛾q be a balanced sutured manifold and let 𝑇 be a compact oriented surface-with-boundary so that the following is true.
(A-1) There is an orientation reversing diffeomorphism 𝑓 : B𝑇 Ñ 𝛾. (A-2) We have 𝜒p𝑇 q ` 𝜒p𝑅`p𝛾qq ă 0.
(A-3) 𝑇 is not a disk. (A-4) 𝑇 is connected.
Once such a 𝑇 is chosen, we can glue r´1, 1s ˆ 𝑇 to 𝑀 and form
Ă
𝑀 “ 𝑀 Y
𝑖𝑑ˆ𝑓r´1, 1s ˆ 𝑇
via the map
𝑖𝑑 ˆ 𝑓 : r´1, 1s ˆ B𝑇 Ñ 𝐴p𝛾q “ r´1, 1s ˆ 𝛾.
It is straightforward to check that Ă𝑀 has two boundary components, since 𝑇 is connected:
B Ă𝑀 “ 𝑅`Y p´𝑅´q, where 𝑅˘“ 𝑅˘p𝛾q Y t˘1u ˆ 𝑇 .
A straightforward computation shows that
𝜒p𝑅`q “ 𝜒p𝑅`p𝛾qq ` 𝜒p𝑇 q “ 𝜒p𝑅´p𝛾qq ` 𝜒p𝑇 q “ 𝜒p𝑅´q.
Thus 𝑅` and 𝑅´ are diffeomorphic. Let ℎ : 𝑅` Ñ 𝑅´ be an orientation preserving
diffeomorphism, then we can glue 𝑅` Ă B Ă𝑀 to 𝑅´Ă B Ă𝑀 and get a closed 3-manifold.
Equivalently, let
𝑌 “ Ă𝑀 Y
ℎY𝑖𝑑r´1, 1s ˆ 𝑅`,
where the two parts are glued via the map
ℎ Y 𝑖𝑑 : 𝑅`Y 𝑅´Ñ t1u ˆ 𝑅`Y t´1u ˆ 𝑅`.
Also, let 𝑅 “ t0u ˆ 𝑅`Ă 𝑌 .
Remark 2.2.1. In general, we could drop condition (A-4) when choosing an auxiliary surface, and the usage of disconnected auxiliary surfaces has some critical applica-tions in the sutured monopole and instanton Floer homology theories. For more
details, readers are referred to [53].
Definition 2.2.2 (Kronheimer and Mrowka [53]). The pair p𝑌, 𝑅q is called a closure of the balanced sutured manifold p𝑀, 𝛾q. Sometimes we simply call 𝑌 a closure. The surface 𝑅 is called a distinguishing surface and its genus is called the genus of the closure. The surface 𝑇 is called an auxiliary surface and the diffeomorphism ℎ is called a gluing diffeomorphism. The manifold Ă𝑀 is called a pre-closure.
Remark 2.2.3. The definition of the genus of a closure is from Baldwin and Sivek [4]. Definition 2.2.4 (Kronheimer and Mrowka [53]). Suppose 𝑌 is a closed connected oriented 3-manifold. Suppose 𝑅 Ă 𝑌 is an embedded closed connected oriented surface so that its genus is at least two. Then, we define the set of top spin𝑐structures to be
Sp𝑌 |𝑅q “ ts Spin𝑐 structures on 𝑌 | 𝑐1psqr𝑅s “ 2𝑔p𝑅q ´ 2u.
If in general 𝑅 is disconnected, then we require that each component of 𝑅 has genus at least two. Assume that
𝑅 “ 𝑅1Y ... Y 𝑅𝑛,
where 𝑅𝑖 are the component of 𝑅, then we define
Sp𝑌 |𝑅q “
𝑛
č
𝑖“1
Sp𝑌 |𝑅𝑖q.
If 𝑌 is disconnected, we require that each component of 𝑌 contains at least one component of 𝑅. With the above notations, we define
𝐻𝑀 p𝑌 |𝑅q “ à
sPSp𝑌,𝑅q
~
where the notation ~𝐻𝑀‚p𝑌, sq is the 𝑡𝑜-version of monopole Floer homology of the
pair p𝑌, sq, introduced by Kronheimer and Mrowka in [52].
Remark 2.2.5. We want 𝑔p𝑅q ě 2 (condition (A-2) in the choice of 𝑇 ) in Definition 2.2.6 for two reasons. The first is that the inequality 𝑔p𝑅q ě 2 together with the requirement that 𝑐1psqr𝑅s “ 2𝑔p𝑅q ´ 2 makes sure that the spin𝑐 structures in
ques-tion is non-torsion and hence 𝑆𝐻𝑀 p𝑀, 𝛾q is finitely generated. The second reason is that for non-torsion spin𝑐 structures, the from- and to-versions of monopole Floer
homology are canonically isomorphic to each other, so there is no difference on which to use. A more precise statement is that we are using the reduced monopole Floer homology. However, when the spin𝑐 structure is non-torsion, the reduced monopole Floer homology is naturally isomorphic to both from- and to-versions.
Definition 2.2.6 (Kronheimer and Mrowka [53]). Suppose p𝑀, 𝛾q is a balanced sutured manifold and p𝑌, 𝑅q is a closure of p𝑀, 𝛾q. Then, we can define the sutured monopole Floer homology of p𝑀, 𝛾q as
𝑆𝐻𝑀 p𝑀, 𝛾q “ 𝐻𝑀 p𝑌 |𝑅q
For later convenience, we also make the following definition.
Definition 2.2.7. For a pair p𝑌, 𝑅q, we define the set of supporting spin𝑐 structures
as
S˚
p𝑌 |𝑅q “ ts P Sp𝑌 |𝑅q | ~𝐻𝑀‚p𝑌, sq ‰ 0u.
We can also use Q, C and Z2 coefficients. The usage of the last one is more subtle
than the others and is valid due to Sivek [84]. Besides this, we can also use some particular local coefficients.
Definition 2.2.8. The mod 2 Novikov ring ℛ is defined to be
ℛ “ tÿ
𝛼
𝑐𝛼𝑡𝛼 | 𝛼 P R, 𝑐𝛼 P Z2, 7t𝛽 ă 𝑛 | 𝑐𝛽 ‰ 0u ă 8 for all 𝑛 P Zu.
Remark 2.2.9. We can also use the usual Novikov ring to construct sutured monopole Floer homology, which has Euler characteristics 0. The convenience for using mod 2 coefficients is that the surgery exact triangle in monopole theory is currently only proved in characteristics 2. See Kronheimer, Mrowka, Ozsváth, and Szabó [44].
Suppose p𝑀, 𝛾q is a balanced sutured manifold and choose an auxiliary surface 𝑇 as above. Let p𝑌, 𝑅q be a closure of p𝑀, 𝛾q arising from 𝑇 and some gluing diffeomorphism ℎ. Choose a non-separating simple closed curve 𝜂 Ă 𝑅.
Definition 2.2.10 (Kronheimer and Mrowka [53]). Under the settings as above, we define 𝑆𝐻𝑀 p𝑀, 𝛾; Γ𝜂q “ 𝐻𝑀 p𝑌 |𝑅; Γ𝜂q “ à sPSp𝑌,𝑅q ~ 𝐻𝑀‚p𝑌, s; Γ𝜂q.
The notation Γ𝜂denotes the use of local coefficients. The Floer homology 𝑆𝐻𝑀 p𝑀, 𝛾; Γ𝜂q
is in fact a finitely generated module over the ring ℛ. Remark 2.2.11. We can define accordingly
S˚
p𝑌 |𝑅; Γ𝜂q “ ts P Sp𝑌 |𝑅q | ~𝐻𝑀‚p𝑌, s; Γ𝜂q ‰ 0u.
This could potentially be different from the set S˚
p𝑌 |𝑅q as in Definition 2.2.7. By abusing notations, we write S˚p𝑌 |𝑅; Γ
𝜂q simply as S˚p𝑌 |𝑅q when the usage of local
coefficients is clear in the context. Accordingly, we will also simply write 𝑆𝐻𝑀 p𝑀, 𝛾q for 𝑆𝐻𝑀 p𝑀, 𝛾; Γ𝜂q
Definition 2.2.12 (Kronheimer and Mrowka [53]). All the choices made in the above definition, p𝑇, 𝑓, ℎ, 𝜂q, are called the auxiliary data.
There are many choices made in the construction of sutured monopole Floer homology. So, a natural question to ask is whether it is well-defined. The first answer to this question is the following theorem. More discussion will be presented in Section 2.4.
Theorem 2.2.13 (Kronheimer and Mrowka [53]). Suppose p𝑀, 𝛾q is a balanced su-tured manifold. Then, the isomorphism classes of 𝑆𝐻𝑀 p𝑀, 𝛾q and 𝑆𝐻𝑀 p𝑀, 𝛾; Γ𝜂q
are independent of all auxiliary data.
We have the following question.
Question 1. Is there a Pin(2) version of sutured monopole Floer homology? For Pin(2)-monopole Floer homology, see Lin [60].
2.3
Instanton theory and balanced sutured
mani-folds
In this section, we introduce some basic constructions of instanton Floer homology on closed 3-manifolds and adapt it to construct sutured instanton Floer homology.
Definition 2.3.1 (Donaldson [16]). Suppose 𝑌 is a closed connected oriented 3-manifold and 𝜔 is an embedded curve. We call the pair p𝑌, 𝛼q admissible if there is an embedded closed connected oriented surface Σ Ă 𝑌 so that 𝑔pΣq ą 0 and Σ ¨ 𝜔 is odd.
Suppose p𝑌, 𝜔q is an admissible pairs. We can construct instanton Floer homology on p𝑌, 𝜔q as follows: Let 𝐸 be an 𝑈 p2q-bundle on 𝑌 so that
𝑐1pdetp𝐸qq “ 𝑃.𝐷.r𝜔s.
Let g𝐸 be the bundle of traceless skew-hermitian endomorphisms of 𝐸, and let 𝒜𝐸
be the space of 𝑆𝑂p3q-connections on g𝐸. Let 𝒢𝐸 be the group of determinant-one
gauge transformations and let ℬ𝐸 “ 𝒜𝐸{𝒢𝐸. Then, we can use the Chern-Simons
functional to construct a well defined 𝑆𝑂p3q instanton Floer homology over C, which we denote by 𝐼𝜔p𝑌 q.
Remark 2.3.2. Though from the construction, 𝐼𝜔p𝑌 q seems to depend on the
homol-ogy class r𝜔s P 𝐻2p𝑌 ; Zq, it is, in fact, an 𝑆𝑂p3q theory and 𝐼𝜔p𝑌 q depends only on the homology class r𝜔s P 𝐻2
p𝑌 ; Z{2Zq, being the second Stiefel-Whitney class of the bundle g𝐸.
Notation. If 𝑥 P 𝑌 is a point, then there is an action 𝜇p𝑥q on 𝐼𝜔p𝑌 q. The action 𝜇p𝑥q has eigenvalues 2 and ´2. By slightly abusing the notations, from now on we use 𝐼𝜔p𝑌 q to denote only the generalized eigenspace of 𝜇p𝑥q corresponding to
eigenvalue 2.
Suppose Σ Ă 𝑌 is a closed oriented embedded surface inside 𝑌 . Then, there is also an action 𝜇pΣq on 𝐼𝜔p𝑌 q. If there are two embedded surfaces Σ and Σ1 inside 𝑌 then the actions 𝜇pΣq and 𝜇pΣ1q commute and 𝜇pΣ Y Σ1q “ 𝜇pΣq ` 𝜇pΣ1q. We
have some results on the eigenvalues of the action 𝜇pΣq. The first discussion is due to Muñoz[65], but the following one is more useful.
Proposition 2.3.3 (Kronheimer and Mrowka [53]). Suppose p𝑌, 𝜔q is an admissible pair, and Σ Ă 𝑌 is an embedded surface with 𝑔pΣq ą 0 and Σ ¨ 𝜔 being odd. Then,
the eigenvalues of the action 𝜇pΣq on 𝐼𝜔p𝑌 q belongs to the set of even integers ranged
from 2 ´ 2𝑔pΣq to 2𝑔pΣq ´ 2.
In Proposition 2.3.3, the condition that Σ ¨ 𝜔 is odd can be removed, as in the following Proposition.
Proposition 2.3.4. Suppose p𝑌, 𝜔q is an admissible pair, and Σ Ă 𝑌 is an embedded surface with 𝑔pΣq ą 0. Then, the eigenvalues of the action 𝜇pΣq on 𝐼𝜔p𝑌 q belongs to the set of even integers ranged from 2 ´ 2𝑔pΣq to 2𝑔pΣq ´ 2.
Remark 2.3.5. The difference between Proposition 2.3.3 and 2.3.4 is that the latter one does not have the requirement that Σ ¨ 𝜔 is odd. Kronheimer and Mrowka in [53] also proved the later proposition when 𝐼𝜔
p𝑌 q is replaced by 𝐼𝜔p𝑌 |𝑅q (See Definition 2.3.7). The proof of Proposition 2.3.4 here is a generalization of their ideas.
Proof of Proposition 2.3.4. Since p𝑌, 𝜔q is admissible, there exists a surface Σ0 so
that 𝑔pΣ0q ą 0 and Σ0¨ 𝜔 is odd. For the moment, let
𝐼𝜔p𝑌, 2𝑖q “ p2𝑖q generalized eigenspace of 𝜇pΣ0q acting on 𝐼𝜔p𝑌 q.
We know from Proposition 2.3.3 that
𝐼𝜔p𝑌 q “
𝑔pΣ0q´1
à
𝑖“1´𝑔pΣ0q
𝐼𝜔p𝑌, 2𝑖q. (2.2)
It is a basic fact that the action 𝜇pΣ0q and 𝜇pΣq on 𝐼𝜔p𝑌 q commutes, so we know
that 𝜇pΣq preserves the spaces 𝐼𝜔p𝑌, 2𝑖q.
Claim 1. The eigenvalues of 𝜇pΣq acting on 𝐼𝜔
p𝑌, 2𝑖q are all in the interval r2 ´ 2𝑔pΣq, 2𝑔pΣq ´ 2s.
To prove this claim, suppose there is an eigenvalue 𝜆 of 𝜇pΣq acting on 𝐼𝜔p𝑌, 2𝑖q,
which is not in the interval r2 ´ 2𝑔pΣq, 2𝑔pΣq ´ 2s. We prove the case when 𝜆 ą 2𝑔pΣq ´ 2 and the other case is exactly the same. Pick an 𝑛 P 2Z so that
𝑛p𝜆 ` 2 ´ 2𝑔pΣqq ą 2𝑔pΣ0q ´ 2,
and pick 𝑣 P 𝐼𝜔p𝑌, 2𝑖q so that 𝜇pΣqp𝑣q “ 𝜆 ¨ 𝑣. Let Σ1 “ Σ
0Y 𝑛Σ, we know that
r𝜇pΣ1q ´ 𝑛𝜆 ´ 2𝑖s𝑁 “`𝑛r𝜇pΣq ´ 𝜆s ` r𝜇pΣ0q ´ 2𝑖s
˘𝑁
.
Hence, we know that
r𝜇pΣ1q ´ 𝑛𝜆 ´ 2𝑖s𝑁p𝑣q “ 0, and thus 𝑛𝜆 ` 2𝑖 is an eigenvalue of 𝜇pΣ1
q on 𝐼𝜔p𝑌 q. Our choice of 𝑛 makes sure that
𝑛𝜆 ` 2𝑖 ą 2𝑔pΣ1
q ´ 2
and Σ1 ¨ 𝜔 is odd. This violates Proposition 2.3.3 and thus concludes the proof of
Claim 1.
Claim 2. The eigenvalues of 𝜇pΣq acting on 𝐼𝜔p𝑌, 2𝑖q are all even integers.
If Σ ¨ 𝜔 is odd, this follows directly from Proposition 2.3.3. If Σ ¨ 𝜔 is even, then let Σ1 “ Σ`Σ
0. Suppose 𝜆 is an eigenvalue of 𝜇pΣq acting on 𝐼𝜔p𝑌, 2𝑖q, and 𝑣 P 𝐼𝜔p𝑌, 2𝑖q
is an eigenvector:
𝜇pΣqp𝑣q “ 𝜆 ¨ 𝑣. Then, we know that
Since Σ1¨ 𝜔 is odd, 𝜆 must be even by Proposition 2.3.3.
Claim 3. The eigenvalue of 𝜇pΣq acting on 𝐼𝜔
p𝑌 q belongs to the interval r2 ´ 2𝑔pΣq, 2𝑔pΣq ´ 2s.
Suppose the contrary, there is an eigenvalue 𝜆 R r2 ´ 2𝑔pΣq, 2𝑔pΣq ´ 2s and an eigenvector 𝑣 P 𝐼𝜔p𝑌 q so that
𝜇pΣqp𝑣q “ 𝜆 ¨ 𝑣.
From the decomposition (2.2) we can write
𝑣 “
𝑔pΣ0q´1
ÿ
𝑖“1´𝑔pΣ0q
𝑣𝑖, 𝑣𝑖 P 𝐼𝜔p𝑌, 2𝑖q.
Then we know that
0 “
𝑔pΣ0q´1
ÿ
𝑖“1´𝑔pΣ0q
p𝜇pΣq ´ 𝜆q𝑣𝑖
which is absurd by Claim 1. This concludes the proof of Claim 3.
Claim 4. The eigenvalues of 𝜇pΣq acting on 𝐼𝜔p𝑌 q are all even integers.
This follows from the same argument as in the proof of Claim 3 and concludes the proof of Proposition 2.3.4.
Question 2. How can we see the action 𝜇pΣq and its eigenvalues on the level of the representation variety of the fundamental groups?
Similar to Corollary 7.6 in Kronheimer and Mrowka [53], we can make the fol-lowing definition.
𝐻2p𝑌 ; Zq Ñ 2Z is a linear function, then we can define 𝐼𝜔p𝑌, 𝜆q “ č 𝜎P𝐻2p𝑌 ;𝑍q ď 𝑁 ě0 𝑘𝑒𝑟p𝜇p𝜎q ´ 𝜆p𝜎qq𝑁.
Such a function 𝜆 is a called an eigenvalue function.
We can lift 𝜆 to a linear map (which we will use the same notation to denote)
𝜆 : 𝐻2p𝑌 ; Qq Ñ Q.
Thus, from now on, we regard 𝜆 as an element in 𝐻2
p𝑌 ; Qq. We then have a decom-position
𝐼𝜔p𝑌 q “ à
𝜆P𝐻2p𝑌 ;Qq
𝐼𝜔p𝑌, 𝜆q.
As we did in Definition 2.2.4, we can make the following definition.
Definition 2.3.7. Suppose p𝑌, 𝜔q is an admissible pair and 𝑅 Ă 𝑌 is an embedded closed oriented surface so that 𝑔p𝑅q ą 0 and 𝑅 ¨ 𝜔 being odd. If 𝑅 is connected, we can define the set of top eigenvalue functions:
Hp𝑌 |𝑅q “ t𝜆 P 𝐻2p𝑌 ; Qq|𝜆pr𝑅sq “ 2𝑔p𝑅q ´ 2u.
If 𝑅 is disconnected and its components are
𝑅 “ 𝑅1Y ... Y 𝑅𝑛, then define Hp𝑌 |𝑅q “ 𝑛 č 𝑖“1 Hp𝑌 |𝑅𝑖q.
Define
𝐼𝜔p𝑌 |𝑅q “ à
𝜆PHp𝑌 |𝑅q
𝐼𝜔p𝑌, 𝜆q.
Define the set of supporting eigenvalue functions as
H˚
p𝑌 |𝑅q “ t𝜆 P Hp𝑌 |𝑅q|𝐼𝜔p𝑌, 𝜆q ‰ 0.u
Remark 2.3.8. Unlike the monopole case in Section 2.2, where we require that 𝑔p𝑅q ą 1, in the instanton settings, we only require that 𝑔p𝑅q ą 0.
We have the following lemma which will be useful later.
Lemma 2.3.9. Suppose p𝑊, 𝜈q is a cobordism between p𝑌, 𝜔q and p𝑌1, 𝜔1
q. Suppose further that 𝜆 P 𝐻2
p𝑌 ; Qq and 𝜆1 P 𝐻2p𝑌1; Qq are two eigenvalue functions. Let 𝑖 : 𝑌 Ñ 𝑊 and 𝑖1 : 𝑌1
Ñ 𝑊 are the inclusion map. If
𝐼p𝑊, 𝜈qp𝐼𝜔p𝑌, 𝜆qq X 𝐼𝜔1p𝑌1, 𝜆1
q ‰ t0u,
then there must be an element 𝜏 P 𝐻2p𝑊 ; Qq so that 𝑖˚p𝜏 q “ 𝜆 and p𝑖1q˚p𝜏 q “ 𝜆1. Proof. For a second homology class 𝜎 and a rational number 𝑟 P Q we can define
𝐼𝜔p𝑌, 𝜎, 𝑟q “ ď
𝑁 ě0
𝑘𝑒𝑟p𝜇p𝜎q ´ 𝑟q𝑁.
By definition, we know that
𝐼𝜔p𝑌, 𝜆q “ č
𝜎P𝐻2p𝑌 ;Qq
𝐼𝜔p𝑌, 𝜎, 𝜆p𝜎qq.
Similarly, we can define 𝐼𝜔1p𝑌1, 𝜎1, 𝑟1
Note we can regard an element 𝜏 P 𝐻2
p𝑊 ; Qq as a map
𝜏 : 𝐻2p𝑊 ; Qq Ñ Q.
Suppose there are no such 𝜏 as in the statement of the lemma, then there is a class 𝜎0 P 𝐻2p𝑌 ; Qq and a class 𝜎01 P 𝐻2p𝑌1; Qq so that
𝑖˚p𝜎0q “ 𝑖1˚p𝜎 1
0q P 𝐻2p𝑊 q,
while
𝜆p𝜎0q ‰ 𝜆1p𝜎01q.
Thus, we know that
𝐼p𝑊, 𝜈qp𝐼𝜔p𝑌, 𝜆qq Ă 𝐼p𝑊, 𝜈qp𝐼𝜔p𝑌, 𝜎0, 𝜆p𝜎0qqq Ă 𝐼𝜔
1
p𝑌1, 𝜎1
0, 𝜆p𝜎0qq.
The last inclusion follows from Lemma 2.6 in [8]. However, 𝜆p𝜎q ‰ 𝜆1
p𝜎1q so 𝐼𝜔1p𝑌1, 𝜎1 0, 𝜆p𝜎0qq X 𝐼𝜔 1 p𝑌1, 𝜎1 0, 𝜆1p𝜎01qq “ t0u. Hence, we conclude 𝐼p𝑊, 𝜈qp𝐼𝜔p𝑌, 𝜆qq X 𝐼𝜔1p𝑌1, 𝜆1 q “ t0u,
which is a contradiction. Thus, Lemma 2.3.9 follows.
Now we explain the construction of sutured instanton Floer homology. Suppose p𝑀, 𝛾q is a balanced sutured manifold. We pick an auxiliary surface 𝑇 that satisfies
the conditions (A-1) to (A-4) as in Section 2.2. We require a new input: (A-5) There is a marked point 𝑝 P intp𝑇 q.
Form the pre-closure Ă𝑀 “ 𝑀 Y r´1, 1s ˆ 𝑇 and let
B Ă𝑀 “ 𝑅`Y 𝑅´.
When picking the gluing diffeomorphism ℎ : 𝑅`Ñ 𝑅´, we require the following.
(A-6) We have ℎpt1u ˆ t𝑝uq “ t´1u ˆ t𝑝u.
Hence, we obtain a closure p𝑌, 𝑅q of p𝑀, 𝛾q and the arc r´1, 1s ˆ t𝑝u is glued to becomes a simple closed curve 𝜔 Ă 𝑌 with 𝑅 ¨ 𝜔 “ ˘1. Thus, p𝑌, 𝜔q is an admissible pair. We make the following definition.
Remark 2.3.10. In the instanton case, we call the triple p𝑌, 𝑅, 𝜔q a closure
Definition 2.3.11 (Kronheimer and Mrowka [53]). Suppose p𝑀, 𝛾q is a balanced sutured manifold, and p𝑌, 𝑅, 𝜔q is a closure obtained as above. Then, we define the sutured instanton Floer homology of p𝑀, 𝛾q as
𝑆𝐻𝐼p𝑀, 𝛾q “ 𝐼𝜔p𝑌 |𝑅q.
There is also a twisted version of sutured instanton Floer homology, in analog to the local coefficients in sutured monopole Floer homology.
Definition 2.3.12 (Kronheimer and Mrowka [53]). Suppose p𝑀, 𝛾q is a balanced sutured manifold, and p𝑌, 𝑅, 𝜔q is a closure obtained as above. Let 𝜂 Ă 𝑅 be a non-separating simple closed curve. Then, we define the sutured instanton Floer homology of p𝑀, 𝛾q as
Question 3. For a balanced sutured manifold p𝑀, 𝛾q, how can 𝑆𝐻𝐼p𝑀, 𝛾q be related to the representations of the fundamental groups of 𝑀 ?
Remark 2.3.13. When 𝜂 is clear in the context, we simply write 𝑆𝐻𝐼p𝑀, 𝛾; 𝜂q as 𝑆𝐻𝐼p𝑀, 𝛾q.
Theorem 2.3.14 (Kronheimer and Mrowka [53]). For a given balanced sutured man-ifold and any closure p𝑌, 𝑅, 𝜔q, we have
𝑆𝐻𝐼p𝑀, 𝛾q – 𝑆𝐻𝐼p𝑀, 𝛾; 𝜂q.
Moreover, the isomorphic type of 𝑆𝐻𝐼p𝑀, 𝛾q is an invariant of the balanced suture manifold.
Notation. To simplify the discussions, for a balanced sutured manifold p𝑀, 𝛾q, we will use 𝐻𝐺p𝑌 |𝑅q to denote both 𝐻𝑀 p𝑌 |𝑅; Γ𝜂q and 𝐼𝜔Y𝜂p𝑌 |𝑅q and use 𝑆𝐻𝐺p𝑀, 𝛾q
to denote both 𝑆𝐻𝑀 p𝑀, 𝛾; Γ𝜂q and 𝑆𝐻𝐼p𝑀, 𝛾; 𝜂q. Also, we will use ℛ to denote
the coefficient ring. In the monopole settings, it is usually the Novikov ring or mod 2 Novikov ring. In the instanton settings, it is the field of complex number.
2.4
Marked closures and naturality
In theorem 2.2.13 and theorem 2.3.14, only the isomorphism classes of the Floer ho-mologies are well defined. However, for purposes such as defining a contact invariant, only having invariance on isomorphism classes is not enough. This leads to the work of Baldwin and Sivek [4] on the naturality of 𝑆𝐻𝑀 and 𝑆𝐻𝐼. The definitions and constructions presented in this section are mainly based on that paper.
Definition 2.4.1 (Baldwin and Sivek [4]). Suppose p𝑀, 𝛾q is a balanced sutured manifold, then an odd marked closure of p𝑀, 𝛾q is a tuple 𝒟 “ p𝑌, 𝑅, 𝑟, 𝑚, 𝜂, 𝜔q, where
(1) 𝑌 is a closed connected oriented 3-manifold.
(2) 𝑅 is a closed connected oriented surface of genus at least 2. (3) We have an orientation preserving embedding
𝑟 : 𝑅 ˆ r´1, 1s Ñ 𝑌.
(4) We have an orientation preserving embedding
𝑚 : 𝑀 Ñ 𝑌 zintpimp𝑟qq
that satisfies following properties.
(a) We have that 𝑚 extends to a diffeomorphism
𝑚 : 𝑀 Y
𝑖𝑑ˆ𝑓r´1, 1s ˆ 𝑇 Ñ 𝑌 zintpimp𝑟qq
for some data 𝐴p𝛾q, 𝑇, 𝑓 .
(b) We have that 𝑚 restricts to an orientation preserving embedding
𝑚 : 𝑅`p𝛾qz𝐴p𝛾q ãÑ 𝑟pt´1u ˆ 𝑅q.
(5) We have that 𝜂 is an oriented non-separating simple closed curve on 𝑅. (6) We have that 𝜔 is a simple closed curve inside 𝑌 so that there is a point 𝑝 P 𝑅 with
Define the genus of 𝒟, which is denoted by 𝑔p𝒟q, to be the genus of the surface 𝑅. Define the sutured monopole or instanton Floer homology of the odd marked closure 𝒟 to be
𝑆𝐻𝐺p𝒟q “ 𝐻𝐺p𝑌 |𝑟pt0u ˆ 𝑅qq.
In [4], Baldwin and Sivek also constructed canonical isomorphisms between the Floer homologies of two different odd marked closures of a fixed balance sutured manifold.
Proposition 2.4.2 (Baldwin and Sivek [4]). Suppose p𝑀, 𝛾q is a balanced sutured manifold. Then, for any two odd marked closures 𝒟 and 𝒟1 of p𝑀, 𝛾q, there is a
canonical map
Φ𝒟,𝒟1 : 𝑆𝐻𝐺p𝒟q Ñ 𝑆𝐻𝐺p𝒟1q,
which is well defined up to multiplication by a unit of ℛ, such that the following is true.
(1) If 𝒟 “ 𝒟1, then
Φ𝒟,𝒟1 “ 𝑖𝑑..
Here, “ means equal up to multiplication by a unit..
(2) If there are 3 marked closures 𝒟, 𝒟1 and 𝒟2, then we have
Φ𝒟1,𝒟2˝ Φ𝒟,𝒟1 “ Φ. 𝒟,𝒟2.
Hence, the Floer homologies and the canonical maps fit into what is called a projective transitive system.
Definition 2.4.3 (Baldwin and Sivek [4]). A projective transitive system of ℛ-modules consists of an index set 𝒜 together with the following data.
(1) A collection of ℛ-modules t𝑀𝛼u𝛼P𝒜.
(2) A collection of equivalence classes of ℛ-modules homomorphisms trℎ𝛼,𝛽su𝛼,𝛽P𝒜,
such that the following is true.
(a) Two morphisms are called equivalent if they differ by multiplication by a unit. (b) For all 𝛼, 𝛽 P 𝒜, ℎ𝛼,𝛽 is an isomorphism from 𝑀𝛼 to 𝑀𝛽.
(c) If 𝛼 “ 𝛽, then ℎ𝛼,𝛽 “ 𝑖𝑑..
(d) For all 𝛼, 𝛽, 𝛾 P 𝒜, we have
ℎ𝛽,𝛾 ˝ ℎ𝛼,𝛽 “ ℎ. 𝛼,𝛾.
With a projective transitive system, we can construct a canonical projective mod-ule out of it:
Definition 2.4.4 (Baldwin and Sivek [4]). Suppose p𝒜, t𝑀𝛼u, tℎ𝛼,𝛽uq is a
projec-tive transiprojec-tive system, then we can define a canonical projecprojec-tive module or simply a canonical module:
𝑀 “ ž
𝛼P𝐴
𝑀𝛼{ „,
where, if we have 𝑚𝛼P 𝑀𝛼 and 𝑚𝛽 P 𝑀𝛽, then 𝑚𝛼 „ 𝑚𝛽 if and only if
ℎ𝛼,𝛽p𝑚𝛼q “ 𝑢 ¨ 𝑚𝛽.
Here, 𝑢 P ℛˆ is a unit.
We can also define maps between two projective transitive systems.
Definition 2.4.5 (Baldwin and Sivek [4]). Suppose we have two projective transitive systems p𝒜, t𝑀𝛼u, tℎ𝛼,𝛽uq and p𝒜1, t𝑀𝛾1u, tℎ1𝛾,𝛿uq. A morphism between them is a
equivalent if and only if they differ by multiplication by a unit, such that
𝑓𝛽,𝛿˝ ℎ𝛼,𝛽 “ ℎ. 1𝛾,𝛿˝ 𝑓𝛼,𝛾
for all indices 𝛼, 𝛽 P 𝒜 and 𝛾, 𝛿 P 𝒜1
Such a morphism defines a map between the canonical projective modules
𝑓 : 𝑀 Ñ 𝑀1
by choosing any 𝛼 P 𝒜, 𝛾 P 𝒜1 and defining
𝑓 pr𝑚𝛼sq “ r𝑓𝛼,𝛾p𝑚𝛼qs.
We say that the map 𝑓 between canonical modules is induced by any map 𝑓𝛼𝛾.
There is a straightforward lemma on how to compare and identify two such mor-phisms.
Lemma 2.4.6. Suppose t𝑓𝛼,𝛾u and t𝑓𝛼,𝛾1 u are two morphisms between two projective
transitive systems p𝒜, t𝑀𝛼u, tℎ𝛼,𝛽uq and p𝒜1, t𝑀𝛾1u, tℎ1𝛾,𝛿uq, then the following three
conditions are equivalent.
(1) The induced maps are equal:
𝑓 “ 𝑓1 : 𝑀 Ñ 𝑀1.
(2) There exist 𝛼, 𝛽 P 𝒜 and 𝛾 P 𝒜1 so that
𝑓𝛽,𝛾˝ ℎ𝛼,𝛽
. “ 𝑓𝛼,𝛾1 .
(3) There exist 𝛼 P 𝒜 and 𝛾, 𝛿 P 𝒜1 so that
𝑓𝛼,𝛿 “ ℎ. 1𝛾𝛿˝ 𝑓 1 𝛼,𝛾.
From the above discussion, we know that the marked closures t𝑆𝐻𝐺p𝒟qu and the canonical maps trΦ𝒟,𝒟1su together form a projective transitive system, and, hence,
we have a canonical projective module
SHGp𝑀, 𝛾q
associated to it.
Remark 2.4.7. throughout the thesis, we will use 𝑆𝐻𝐺 to denote the sutured monopole or instanton Floer homology of a particular marked closure 𝒟. The notation SHG will be used to denote the canonical module coming from the projective transitive system over p𝑀, 𝛾q. This usage of notations might be slightly different from Baldwin and Sivek’s original paper.
Notation. All the discussions in the rest of the thesis are irrelevant with the choice of the curve 𝜔 so that we will omit it from all notations and discussions. We simply write an odd marked closure as 𝒟 “ p𝑌, 𝑅, 𝑟, 𝑚, 𝜂q and call it a marked closure. As one might have already observed, the data 𝜔 is not used in the monopole setups, and the phrase ’marked closure’ is exactly the one Baldwin and Sivek introduce their refinement of the closures in the monopole setups.
There is a new ambiguity when dealing with knots in 3-manifolds. Let 𝐾 Ă 𝑌 be a knot. The new ambiguity comes from the choices of tubular neighborhoods of
𝐾 Ă 𝑌 to remove to obtain a knot complement. Fix a point 𝑝 P 𝐾. Suppose
𝜙 : 𝑆1ˆ 𝐷2 ãÑ 𝑌
is an embedding, where 𝐷2 is the unit sphere in the complex plane, and 𝑆1 “ B𝐷2. We require that
𝜙p𝑆1ˆ t0uq “ 𝐾, and 𝜙pt1u ˆ t0uq “ 𝑝.
Let 𝑌𝜙 “ 𝑌 zintpimp𝜑qq, and let 𝛾𝜙 “ 𝜙pt˘1u ˆ B𝐷2q, with opposite orientations
on two components. For each fixed 𝜙, we have a well defined canonical module SHMp𝑌 p𝜙q, 𝛾𝜙q, and we want to relate different choices of 𝜙.
Suppose 𝜙1 is another embedding 𝑆1 ˆ 𝐷2 ãÑ 𝑌 , satisfying the same conditions
as 𝜙. Pick a tubular neighborhood 𝑁 of 𝐾 Ă 𝑌 such that imp𝜙q, imp𝜙1
q Ă 𝑁 . Also, pick an ambient isotopy
𝑓𝑡: 𝑌 Ñ 𝑌, 𝑡 P r0, 1s
such that the following is true. (1) For any 𝑡 P r0, 1s, 𝑓𝑡p𝑝q “ 𝑝.
(2) For any 𝑡 P r0, 1s, 𝑓𝑡 restricts to identity outside 𝑁 Ă 𝑌 .
(3) We have 𝑓1pimp𝜙qq “ imp𝜙1q.
(4) We have 𝑓1p𝜙pt˘1u ˆ B𝐷2qq “ 𝜙1pt˘1u ˆ 𝐷2q.
It is clear that 𝑓1 : p𝑌𝜙, 𝛾𝜙q Ñ p𝑌𝜙1, 𝛾𝜙1q is a diffeomorphism between balanced
sutured manifolds. Hence, we can define
Ψ𝜙,𝜙1 “ SHMp𝑓1q : SHMp𝑌𝜙, 𝛾𝜙q Ñ SHMp𝑌𝜙1, 𝛾𝜙1q.
independent of the choices of the tubular neighborhood 𝑁 and the ambient isotopy 𝑓𝑡.
Also, it has the following properties. (1) We have Ψ𝜙,𝜙“ 𝑖𝑑.
(2) If there is a third embedding 𝜙2, then
Ψ𝜙,𝜙2 “ Ψ𝜙1,𝜙2˝ Ψ𝜙,𝜙1.
Thus, we know that tSHGp𝑌𝜙, 𝛾𝜙qu and tΨ𝜙,𝜙1u form a transitive system of
pro-jective transitive systems that can be viewed as a larger propro-jective transitive system, and, hence, the monopole knot Floer homology KHGp𝑌, 𝐾, 𝑝q is well defined.
We have the following two questions.
Question 4. Can we resolve the ambiguity of multiplication by a unit in the natu-rality of sutured monopole and instanton Floer homologies?
Question 5. For a fixed balanced sutured manifold p𝑀, 𝛾q, is there a canonical clo-sure p𝑌, 𝑅q associated to p𝑀, 𝛾q?
2.5
Floer’s Excisions
There are many choices made in the construction of sutured monopole and instanton Floer homologies. To show that these choices do give rise to a well-defined invariant, we need to use Floer’s excisions. Floer’s excision is a powerful tool that was originally produced by Floer in instanton theory in [22] and was introduced by Kronheimer and Mrowka into the context of sutured monopole and instanton Floer homologies in [53]. There are various versions of Floer’s excisions that we will explain in detail.
let Σ𝑖 Ă 𝑌𝑖 be a connected oriented homologically essential surface so that
𝑔pΣ1q “ 𝑔pΣ2q ě 1. (2.3)
For 𝑖 “ 1, 2, let 𝑌1
𝑖 “ 𝑌𝑖zintp𝑁 pΣ𝑖qq, then we know that
B𝑌𝑖1 “ Σ𝑖,`Y ´Σ𝑖,´,
where Σ𝑖,˘ are parallel copies of Σ𝑖. Pick an orientation preserving diffeomorphism
ℎ : Σ1 Ñ Σ2,
then we can use ℎ to glue Σ1,` to Σ2,´ and glue Σ1,´ to Σ2,`. The result is a closed
3-manifold 𝑌 so that 𝑌 “ 𝑌1 1 Y ℎYℎ𝑌 1 2.
There is a surface Σ “ Σ1,`Y Σ1,´ Ă 𝑌 and a 4-dimensional cobordism 𝑊 from
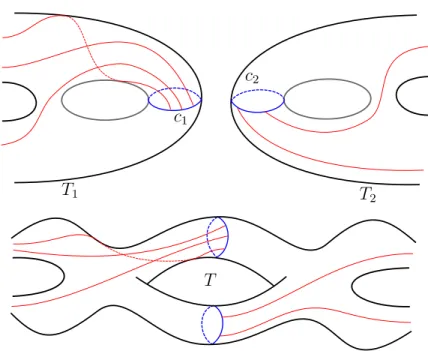
𝑌1\ 𝑌2 to 𝑌 as follows. Let 𝑈 be the surface as depicted in Figure 2-2. Four parts of
the boundary of 𝑈 , which we denote by 𝜈1, ..., 𝜈4, are each identified with the interval
r0, 1s. We can glue three parts r0, 1s ˆ 𝑌11, 𝑈 ˆ Σ`, and r0, 1s ˆ 𝑌21 together to get 𝑊 :
𝑊 “ r0, 1s ˆ 𝑌1 1Y 𝜑 𝑈 ˆ Σ1,`Y𝜓r0, 1s ˆ 𝑌 1 2, where 𝜑 “ 𝑖𝑑r0,1sˆ p𝑖𝑑Σ1 Y 𝑖𝑑Σ1q : r0, 1s ˆ pΣ1,`Y Σ1,´q Ñ p𝜈1 Y 𝜈4q ˆ Σ1,`,
and
𝜓 “ 𝑖𝑑r0,1sˆ pℎ Y ℎq : p𝜈2Y 𝜈3q ˆ Σ1,` Ñ r0, 1s ˆ pΣ2,`Y Σ2,´q.
There are various settings regarding the choices of surfaces and local coefficients. We summarize them as follows.
(FEM-1) We have 𝑔pΣ1q “ 𝑔pΣ2q ą 1. In this case Floer’s excision works with Z
coefficients. However, to make a uniform statement in Theorem 2.5.1, we still write Γ𝜂
but for this case 𝜂1 “ 𝜂2 “ 𝜂 “ H. Also, let 𝑅𝑖 “ Σ𝑖 Ă 𝑌𝑖 and 𝑅 “ Σ1,`Y Σ2,`Ă 𝑌 .
Take 𝜈 “ H.
(FEM-2) We have 𝑔pΣ1q “ 𝑔pΣ2q ą 1. Let 𝜂1 “ H and 𝜂2 Ă Σ2 be a
non-separating simple closed curve. Inside 𝑊 , there is naturally a cylinder 𝜈 “ r0, 1s ˆ 𝜂2
and we pick
𝜂 “ r0, 1s ˆ 𝜂2X 𝑌 “ t1u ˆ 𝜂2.
Also, let 𝑅𝑖 “ Σ𝑖 Ă 𝑌𝑖 and 𝑅 “ Σ1,`Y Σ2,` Ă 𝑌 .
(FEM-3) We have 𝑔pΣ1q “ 𝑔pΣ2q “ 1. For 𝑖 “ 1, 2, Let 𝑅𝑖 Ă 𝑌𝑖 be a connected
closed oriented surface which intersects Σ𝑖 transversely along a circle. Pick 𝜂𝑖 a
non-separating simple closed curve on 𝑅𝑖, which intersects Σ𝑖 transversely at one point.
In this case we also assume that
ℎp𝑅1X Σ1q “ 𝑅2X Σ2,
and
ℎp𝜂1X Σ1q “ 𝜂2 X Σ2.
When cutting and re-gluing Σ1 and Σ2, the surfaces 𝑅1 and 𝑅2 are cut and
re-glued to form a surface 𝑅 Ă 𝑌 and the curves 𝜂1 and 𝜂2 are also cut and re-glued
boundary is 𝜂1 Y 𝜂2Y 𝜂3. r0, 1s ˆ 𝑌11 𝑈 ˆ Σ1,` r0, 1s ˆ 𝑌21 𝑖𝑑 𝑖𝑑 ℎ ℎ 𝜇2 𝜇1 𝜇3 𝜇4
Figure 2-2: Gluing three parts together to get 𝑊 . The middle part is 𝑈 ˆ Σ1,`, while
the Σ1,` directions shrink to a point in the figure.
Theorem 2.5.1 (Kronheimer and Mrowka [53]). In all the three cases, (FE-1), (FE-2), and (FE-3), the cobordism p𝑊, 𝜈q induces an isomorphism
𝐻𝑀 p𝑊 ; Γ𝜈q : 𝐻𝑀 p𝑌1\ 𝑌2|𝑅1Y 𝑅2; Γ𝜂1Y𝜂2q
–
ÝÑ 𝐻𝑀 p𝑌 |𝑅; Γ𝜂q
In instanton theory, we need to modify the setups described above:
(FEI-1) We have 𝑔pΣ1q “ 𝑔pΣ2q ą 0. Take 𝜂1 “ 𝜂2 “ 𝜂 “ H. Let 𝑅𝑖 “ Σ𝑖 Ă 𝑌𝑖
and 𝑅 “ Σ1,`Y Σ2,` Ă 𝑌 . For 𝑖 “ 1, 2, take 𝜔𝑖 Ă 𝑌𝑖 a simple closed curve that
intersects Σ𝑖 transversely once. We require that
ℎp𝜔1X Σ1q “ 𝜔2X Σ2.
When cutting and re-gluing Σ1 and Σ2, the curves 𝜔1 and 𝜔2 are also cut and
re-glued to become a simple closed curve 𝜔 Ă 𝑅. There is a pair of pants 𝜈 Ă 𝑊 whose boundary is 𝜔1Y 𝜔2Y 𝜔.
(FEI-2) We have 𝑔pΣ1q “ 𝑔pΣ2q ą 0. Let 𝜂1 “ H and 𝜂2 Ă Σ2 be a non-separating
simple closed curve. Inside 𝑊 , there is a natural cylinder 𝜈1r0, 1s ˆ 𝜂2 and we pick
𝜂 “ r0, 1s ˆ 𝜂2X 𝑌 “ t1u ˆ 𝜂2.
Also, let 𝑅𝑖 “ Σ𝑖 Ă 𝑌𝑖 and 𝑅 “ Σ1,`Y Σ2,` Ă 𝑌 .
For 𝑖 “ 1, 2, take 𝜔𝑖 Ă 𝑌𝑖 a simple closed curve which intersects Σ𝑖 transversely
once and which is disjoint from 𝜂𝑖. We require that
ℎp𝜔1X Σ1q “ 𝜔2X Σ2.
When cutting and re-gluing Σ1 and Σ2, the curves 𝜔1and 𝜔2are also cut and re-glued
to become a simple closed curve 𝜔 Ă 𝑅. There is a pair of pants 𝜈2 Ă 𝑊 whose
boundary is 𝜔1Y 𝜔2 Y 𝜔. Take 𝜈 “ 𝜈1Y 𝜈2.
(FEI-3) We have 𝑔pΣ1q “ 𝑔pΣ2q “ 1. For 𝑖 “ 1, 2, Let 𝑅𝑖 Ă 𝑌𝑖 be a connected
closed oriented surface that intersects Σ𝑖 transversely along a circle. Pick 𝜂𝑖 a
non-separating simple closed curve on 𝑅𝑖, which intersects Σ𝑖 transversely at one point.
Pick 𝜔𝑖 Ă 𝑌𝑖 a simple closed curve which intersects 𝑅𝑖 transversely at one point and
which is disjoint from 𝜂𝑖. In this case we also assume that
ℎp𝑅1X Σ1q “ 𝑅2X Σ2,
and
ℎp𝜂1X Σ1q “ 𝜂2 X Σ2.
When cutting and re-gluing Σ1 and Σ2, the surfaces 𝑅1 and 𝑅2 are cut and
to become a simple closed curve 𝜂 Ă 𝑅. There is a pair of pants 𝜈1 inside 𝑊 whose
boundary is 𝜂1 Y 𝜂2Y 𝜂3. There is a disjoint union of two annuli
𝜈2 “ r0, 1s ˆ p𝜔1Y 𝜔2q Ă 𝑊.
Take 𝜔 “ 𝜈2 X 𝑌 and 𝜈 “ 𝜈1Y 𝜈2.
Theorem 2.5.2 (Kronheimer and Mrowka [53]). Under all the three cases, (FEI-1), (FEI-2), and (FEI-3), the cobordism p𝑊, 𝜈q induces an isomorphism
𝐼p𝑊, 𝜈q : 𝐼𝜔1Y𝜂1
p𝑌1|Σ1q b 𝐼𝜔2Y𝜂2p𝑌2|Σ2q –
ÝÑ 𝐼𝜔Y𝜂p𝑌 |Σq.
2.6
Basic properties of SHM and SHI
In this section, we summarize the basic properties of the sutured monopole and instanton Floer homologies. First, in the monopole settings, it is most useful to use local coefficients and the mod 2 Novikov ring ℛ. In this setup, we can only look at the rank of the homology since it is always free by the following lemma.
Lemma 2.6.1. For any balanced sutured manifold p𝑀, 𝛾q, SHMp𝑀, 𝛾q is a free ℛ module.
Proof. As in Kronheimer and Mrowka [53], we know that for any closure p𝑌, 𝑅q of p𝑀, 𝛾q and any non-separating simple closed curve 𝜂, we have
𝐻𝑀 p𝑌 |𝑅; Γ𝜂q “ 𝐻𝑀 p𝑌 |𝑅; Z2q bZ2 ℛ.
This is a simple application of the Floer’s excision in Theorem 2.5.1 and the following lemma.
Lemma 2.6.2 (Kronheimer and Mrowka). Suppose 𝑅 is a connected closed oriented surface of genus at least 2 in the monopole setup and at least 1 in the instanton setups. Suppose 𝜂 is a collection of non-separating simple closed curves on 𝑅 (possibly empty). Let ℎ : 𝑅 Ñ 𝑅 be an orientation preserving diffeomorphism. Let 𝑌 be the mapping torus of 𝑅, then 𝑅 naturally embeds into 𝑌 . We have
𝐻𝑀 p𝑌 |𝑅; Γ𝜂q – ℛ.
In the instanton settings, we only need to assume that 𝑔p𝑅q ą 0 but further require that ℎ has a fixed point 𝑝. Let 𝜔 “ 𝑝 ˆ 𝑆1
Ă 𝑌 . Then, we have
𝐼𝜔Y𝜂p𝑌 |𝑅q – C.
Corollary 2.6.3 (Kronheimer and Mrowka [53]). If p𝑀, 𝛾q is a product sutured manifold as in Definition 2.1.4, then SHGp𝑀, 𝛾q has rank one.
The inverse of Lemma 2.6.2 is almost true, as we have the following theorems. Theorem 2.6.4. Suppose 𝑌 is a closed connected oriented 3-manifold and 𝑅 Ă 𝑌 is a closed connected oriented surface of genus at least 2. If 𝑅 represents a non-trivial homology class and 𝐻𝑀 p𝑌 |𝑅q has rank one, then 𝑌 is a fibration over 𝑆1 with fiber 𝑅.
Remark 2.6.5. The same statement in Heegaard Floer theory was proved by Ni in [68]. The same conclusion in monopole theory follows from the isomorphism ~𝐻𝑀 – 𝐻𝐹`
proved by Kutluhan, Lee, and Taubes in [55] and subsequent papers.
Theorem 2.6.6 (Baldwin and Sivek [9]). Suppose p𝑌, 𝜔q is an admissible pair and 𝑅 Ă 𝑌 is a closed connected oriented surface with 𝑅 ¨ 𝜔 odd. Suppose further that
𝑌 z𝑁 p𝑅q is a homology product and 𝐼𝜔p𝑌 |𝑅q has rank one, then 𝑌 is a fibration over
𝑆1 with fibre 𝑅.
Question 6. Can we drop the condition that 𝑌 z𝑁 p𝑅q is a homology product in Theorem 2.6.6?
We have introduced the operation of sutured manifold decompositions in Defi-nition 2.1.15. In [53], Kronheimer and Mrowka related the sutured monopole and instanton Floer homologies of balanced sutured manifolds before and after a sutured manifold decomposition along with a special type of surfaces.
Definition 2.6.7 (Juhasz [38]). Suppose 𝐹 is a compact oriented surface. A simple closed curve 𝛾 Ă 𝐹 is called boundary coherent if it is either homologically essential in 𝐻1p𝐹 q or the oriented boundary of a compact subsurface 𝐹1 Ă 𝐹 with the orientation
of 𝐹1 induced by the one on 𝐹 .
Theorem 2.6.8 (Kronheimer and Mrowka [53]). Suppose p𝑀, 𝛾q is a balanced su-tured manifold and 𝑆 Ă 𝑀 is a properly embedded surface so that it has no closed components, and that for every component 𝑉 of 𝑅p𝛾q, the set of closed components of 𝑆 X 𝑉 consists of parallel oriented boundary-coherent simple closed curves. Suppose p𝑀1, 𝛾1q is obtained from p𝑀, 𝛾q by a sutured manifold decomposition along 𝑆. Then,
𝑆𝐻𝐺p𝑀1, 𝛾1
q is a direct summand of 𝑆𝐻𝐺p𝑀, 𝛾q.
There is also a slightly refined version of Gabai’s theorem on sutured manifold hierarchies.
Theorem 2.6.9 (Juhasz [38]). If p𝑀, 𝛾q is a taut balanced sutured manifold, then there exists a sutured manifold hierarchy as in Definition 2.1.18 so that each decom-position surface 𝑆𝑖, for 𝑖 “ 1, ..., 𝑛, satisfies the hypothesis in Theorem 2.6.8.
Corollary 2.6.10 (Kronheimer and Mrowka [53]). Suppose p𝑀, 𝛾q is a taut balanced sutured manifold then SHGp𝑀, 𝛾q ‰ 0.
The inverse of this corollary is almost true.
Corollary 2.6.11. If p𝑀, 𝛾q is a balanced sutured manifold and 𝑀 is irreducible, then p𝑀, 𝛾q is taut if and only if SHGp𝑀, 𝛾q ‰ 0.
Proof. The if part is proved by corollary 2.6.10. For the only if part, if p𝑀, 𝛾q is irreducible but non-taut, then by Definition 2.1.9, 𝑅˘p𝛾q must be either not
norm-minimizing or compressible. Then, the corollary follows from Definition 2.2.10, Def-inition 2.3.12, Proposition 2.3.4, and the following lemma known as the adjunction inequality.
Lemma 2.6.12 (Adjunction inequality, Kronheimer and Mrowka [53]). Suppose 𝑌 is a closed oriented 3-manifold and s is a spin𝑐 structure on 𝑌 . Suppose there is a
closed connected oriented surface 𝑅 of genus at least one, so that
|𝑐1psqr𝑅s| ą 2𝑔p𝑅q ´ 2,
then
~
𝐻𝑀‚p𝑌, s; Γ𝜂q “ 0
for any possible local coefficients (𝜂 can be empty).
One might be wondering what happens if 𝑀 is not irreducible. In this case, we can write
𝑀 “ 𝑀17𝑀2
Since the connected sum is done in the interior, we know that
B𝑀 “ B𝑀1Y B𝑀2.
The suture splits into two parts 𝛾 “ 𝛾1Y 𝛾2, 𝛾𝑖 Ă B𝑀𝑖. Then, there are two different
cases.
Case 1. One of 𝑀1 and 𝑀2 is closed. Suppose, without loss of generality, 𝑀1
is closed. Let p𝑀1p1q, 𝛿q be the balanced sutured manifold obtained form 𝑀1 by
removing a 3-ball in the interior and put one connected simple closed curve on the boundary as the suture. Then, we have
Proposition 2.6.13 (Li [56]). Under the above settings, we have
SHGp𝑀, 𝛾q – SHGp𝑀1p1q, 𝛿q b SHGp𝑀2, 𝛾2q.
In the monopole setups, the Floer homology 𝑆𝐻𝑀 p𝑀1p1q, 𝛿q is isomorphic to the
tilde-version of monopole Floer homology of 𝑀1, denoted by Ć𝐻𝑀 p𝑀1q, which was
introduced by Kutluhan, Lee, and Taubes in [55]. In the instanton setups, the Floer homology 𝑆𝐻𝐼p𝑀1p1q, 𝛿q is isomorphic to the framed instanton Floer homology of
𝑀1, denoted by 𝐼7p𝑀1q, which was introduced by Kronheimer and Mrowka in [48].
Case 2. Both 𝑀1 and 𝑀2 has non-trivial boundaries and from Definition 2.1.1,
we know that both 𝛾1 and 𝛾2 are non-empty. We have the following basic lemma.
Lemma 2.6.14. If SHGp𝑀, 𝛾q ‰ 0, then both p𝑀1, 𝛾1q and p𝑀2, 𝛾2q are balanced
sutured manifolds.
Proof. It is straightforward to check that condition (1) and (2) in Definition 2.1.1 are automatically satisfied. If condition (3) does not hold, it is straightforward to
apply the adjunction inequality in Lemma 2.6.12 or Proposition 2.3.4 to obtain a contradiction.
Proposition 2.6.15 (Li [56]). When the conclusion of Lemma 2.6.14 holds, we have
SHGp𝑀, 𝛾q “ SHGp𝑀1, 𝛾1q b SHGp𝑀2, 𝛾2q b SHGp𝑆3p2q, 𝛿q,
where p𝑆3p2q, 𝛿q is the balanced sutured manifold obtained from 𝑆3 by removing two
disjoint 3-balls and put one connected simple closed curve on each component of the boundary as the suture. Its homology SHGp𝑆3p2q, 𝛿q has rank two.
Corollary 2.6.16. Suppose p𝑀, 𝛾q is a balanced sutured manifold. Then, SHGp𝑀, 𝛾q ‰ 0 if and only if every irreducible connected summand of p𝑀, 𝛾q is either a closed 3-manifold having non-trivial Floer homology Ć𝐻𝑀 or 𝐼7, or a taut balanced sutured
manifold.
It is a basic fact that the sutured Floer homology (SFH) defined by Juhasz [38] decomposes along spin𝑐structures. So one could ask whether the same property holds for 𝑆𝐻𝐺. However, the case of sutured monopole and instanton Floer homologies is more subtle, since different closures may have different sets of (supporting) spin𝑐 structures or eigenvalue functions. Nevertheless, if we choose a properly embedded surface 𝑆 Ă 𝑀 , we can decompose SHG with respect to 𝑆 by looking at the evalua-tions of the first Chern classes of spin𝑐structures, or the eigenvalue functions, on the
fundamental class of a proper extension of the surface 𝑆 and obtain a well-defined splitting of SHG. This leads to the following discussion.
Definition 2.6.17. Suppose p𝑀, 𝛾q is a balanced sutured manifold and 𝑆 Ă 𝑀 is a properly embedded oriented surface. 𝑆 is called admissible if the following holds.