Université
de
Mohamed
Seddik Ben
Yahia
-.{-l3Ai-'ât'-7
'.{rftdË
T'\
i,',i;,
.F1'L
'*.**-*..'*-,.-,,. i .{r)t
ll
."f :
*r
Faculté des Sciences et dela
TechnologieDépartement
d oElectrotechnique
Mémoire
De
Fin
doEtudes
En vue de
I'obtention
du
diplôme
de
Master
en Electromécanique
Thème
Travail
réalisépar:
M'
z Ziane AbdessamedM':
Ghaddar Mohammed
Encadré
par:
Dr:
Maouche Abdelazin
Promotion
:
Juin
2018
Application
de
l'Obsenration
Adaptatif pour I'Estimation
de
l'Etat
et
des
Paramètres
d'une Flachine
Asynchrone
-R
Nous remercions tout d’abord ALLAH le tout puissant pour nous avoir donnés
la force et le courage pour faire aboutir ce travail.
Nous tenons aussi à exprimer notre gratitude et nos sincères remerciements à
notre encadreur
MonsieurA.MAOUCHE pour avoir dirigé ce mémoire, pour son
temps qu’il a accordé, ses conseils, ses encouragements et les précieuses
orientations qui ont contribué à baliser le parcours de cette recherche.
Nous remercions les membres de jury qui ont accepté d’examiner notre modeste
travail, pour leur disponibilité et leur confiance.
Nous remercions aussi nos enseignants de département d’électrotechnique de
l’université de Jijel qui nous guident pendant les 5 années d’étude.
Un tel travail est également le résultat des efforts de beaucoup de personnes qui
nous ont aidés énormément, à ceux qui nous ont facilités l'accès à l'information
pour l’élaboration de ce mémoire.
Figure (I.1). Stator et rotor d’une MAS 3
Figure (I.2). Stator d’une MAS 4
Figure (I.3). Différents types de rotor d’une MAS 5 Figure (I.4). Représentation triphasée simplifiée d’une machine
asynchrone 7
Figure (I.5). Modèle de Park de la machine asynchrone 10 Figure (I.6). Représentation schématique de la transformation des
enroulements réels en enroulements équivalents (Transformation de Park)
11
Figure (I.7). Vitesse de la MAS 24
Figure (I.8). Courant ( ) statorique de la MAS 25 Figure (II.1). Schéma de principe d’un système observateur 28 Figure (II.2). Principe de l'observateur de Luenberger 29 Figure (II.3). Principe de l'observateur de type Kalman 30
Figure (II.4). Principe de l’observateur à grand gain 32 Figure (II.5). Diagramme descriptif des étapes de conception de
l'observateur. 33
Figure (II.6). Schéma block d’un groupe
machine-Convertisseur-commande FOC avec observateur à grand gain 39 Figure (II.7). Schéma block d’un groupe machine-observateur avec
une commande en BO 40
Figure (II.8). Flux rotorique réel et estimé avec commande FOC 41 Figure (II.9). Vitesse de la MAS réel et estimé avec une
commande FOC 42
Figure (II.10). Couple de charge appliqué à la MAS (réel et estimé)
avec commande en FOC. 43
Figure (II.11). Flux rotorique réel et estimé avec la commande en
estimé) avec la commande en BO 46 Figure (II.14). Les erreurs commises en estimation pour le flux, la
vitesse et le couple de charge 47 Figure (III.1). Schéma de principe de l’observateur adaptatif 52 Figure (III.2). Schéma de principe de l'observateur adaptatif pour
l’estimation de flux et des paramètres, avec mesure de vitesse
53
Figure(III.3).
Diagramme descriptif des étapes de conception de l'observateur
59 Figure (III.4). Flux rotorique de la MAS (réel et estimer) 65
Figure (III.5). Paramètre estimés de la MAS ( ) 66 Figure (III.6). Paramètre estimés de la MAS (
). 67
Figure (III.7). L’inductance et la résistance rotoriques estimés (réel et estimé).
68 Figure (IV.1). Schéma du principe de l'observateur adaptatif sans
mesure de vitesse 70
Figure(IV.2). Les variables d’états estimées par l’observateur adaptatif, (a) le flux rotorique, (b) la vitesse de rotation et (c) le couple de charge
80
Figure (IV.3) erreur d’estimation pour la vitesse et flux rotorique 81 Figure (IV.4). Erreur d’estimation pour couple de charge ̂ 82 Figure (IV.5). Les deux paramètres estimés ̂ et ̂ 83 Figure (IV.6). Résistances statoriques et rotoriques estimées ̂ et
Liste des tableaux
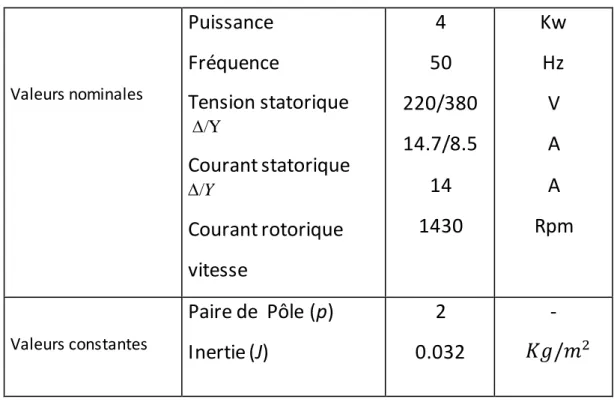
Tableau A.1 : Caractéristiques de la machine asynchrone utilisée 96 Tableau A.2. Caractéristiques physiques de la machine asynchrone
utilisée
96 Figure (IV.8). Zoom sur la région de fonctionnement critique à
basse vitesse pour Les paramètres estimées ̂ et ̂ pour les deux tests
87
Figure(IV.9). Les deux termes de la condition d’observabilité donnée par l’équation (I.44), (a) pour et (b) pour
les deux tests
88
Figure (B.1). Schéma de principe du groupe convertisseur 97 Figure (B.2). Redresseur triphasé à diodes. 98
Figure (B.3). La tension de sortie du redresseur et les tensions
triphasées 99
Figure (B.4). Représentation du filtre passe-bas 100 Figure (B.5). Les tensions d'entrée et de sortie du filtre 101
Figure (B.6). Onduleur de tension à 2 niveaux 103 Figure (B.7). Principe de modulation de la technique
triongulo-sinusoïdale 107
Figure (B.8). Les tensions simples à la sortie de l'onduleur 108
est
estiméFOC
Commande à flux orientéCVT
Commande par variation de tensionMLI
Modulation de largeur d’impulsionIndices
a, b, c
Indices indiquant les trois phases statoriques de la machine
A, B, C
Indices indiquant les trois phases rotoriques de la machine
Axes
et
du repère diphasé lié au statord, q
Axes d, q du repère diphasé de Parck
s, r
Indices indiquant le stator et le rotor respectivement
Principaux Grandeurs et paramètres
Position angulaire du rotor par rapport au stator
Position angulaire du stator par rapport au repère tournant(
dq)
Position angulaire du rotor par rapport au repère tournant(
dq)
Vitesse mécanique du rotor
Pulsation électrique du stator par rapport au repère tournant (dq)
Tension statorique
Tension rotorique
Flux statorique
Flux rotorique
Couple de charge
Couple électromagnétique
Résistance statorique
Résistance rotorique
Inductance statorique
Inductance rotorique
nombre des paires de pôles
Inductance mutuelle stator-rotor
Coefficient de dispersion ou de BlondelJ
Moment d'inertie du rotorf coefficient de frottement visqueux.
Chapitre I : Modélisation et observabilité de la
machine asynchrone
I.1. Introduction ...3
I.2. Description ...3
I.2.1. Principe de fonctionnement ...3
I.2.2. Le stator : ...4
I.2.3. Le rotor ...4
I.3. Modélisation de la machine asynchrone triphasée ...5
I.3.1. Hypothèses simplificatrices...5
I.3.2. Modèle mathématique de la machine asynchrone ...6
I.3.2.1. Les équations électriques ...7
I.3.2.2. Equation magnétique ...8
I.3.2.3. Equation mécanique ...9
I.3.2.4. Transformation de Park... 10
I.3.2.5. Choix de référentiels ... 12
I.3.2.5.1. Référentiel fixe par rapport au stator... 12
I.3.2.5.2. Référentiel fixe par rapport au rotor ... 13
I.3.2.5.3. Référentiel fixe par rapport au champ tournant ... 14
I.3.2.6. Expression du modèle linéaire de la machine ... 14
I.3.2.7. Modèle non linéaire de la machine asynchrone ... 16
I.3.2.8. Choix des sorties ... 17
I.4. Observabilité de la machine asynchrone ... 18
I.5. Résultats de Simulation ... 24
asynchrone
II.1. Introduction ... 27
II.2. Notion d’observateur d’état ... 27
II.3. Observateurs pour systèmes linéaires ... 28
II.3.1. Observateur de Luenberger ... 29
II.3.2. Observateur de type Kalman ... 30
II.3.3. Observateur de type grand gain ... 32
II.4. Application de l’observation d’état à la machine asynchrone .. 33
II.4.1.
Conception d’observateur à grand gain pour la machine
asynchrone ... 34
II.5. Résultats de la simulation ... 39
II.2.5.1. Discussion des résultats ... 48
II.2.6. Conclusion ... 48
Chapitre III :
Application de l’observateur
adaptative à la machine asynchrone
III.1. Introduction ... 50
III.2. Présentation de l’observateur adaptatif ... 50
III.2.1. Introduction ... 50
III.2.2. Modèle de l’observateur adaptative ... 51
III.3. Application de l’observateur adaptatif à la MAS avec mesure
de la vitesse ... 53
(après transformation) ... 55
III.3.2 Conception de l’observateur ... 59
III.3.2.a Expression de l’observateur dans les nouvelles
cordonnées ... 59
III.3.2.b Expression de l’observateur dans les cordonnées
originales ... 61
III.4 Résultats de simulation ... 65
III.5 Discutions des résultats ... 69
Chapitre IV : Observation adaptative de la machine
sans capteur de vitesse
IV.1. Introduction ... 70
IV.2. Application de l’observateur adaptatif sans mesure de
vitesse ... 70
IV.2.1 Modélisation de la machine ... 71
IV.2.2 Modèle de la machines dans les nouvelles cordonnées .... 73
IV.2.3 Expression de l’observateur dans les cordonnées
originales ... 74
IV.3 Résultats de simulation ... 79
IV.4 Discutions des résultats ... 89
IV.5. Conclusion ... 89
Bibliographie ... 92
Page : 1
Introduction générale
La simplicité dans la conception mécanique et électrique des machines à courant alternatif (contrairement à la machine à courant continu contenant un collecteur mécanique) en plus de la disponibilité des sources d'énergie électriques sous la forme alternative ont permis leur emploi dans de nombreux domaines de l'industrie notamment la machine asynchrone. Néanmoins, cette simplicité apparente de conception et d’utilisation cache une grande complexité dans les études de commande et de surveillance de ce type de machines, [1]. Du point de vue de l'automatique, la machine asynchrone est un système dynamique qui pose un certain nombre de problèmes à cause de ses caractéristiques: système non linéaire, multivariable, fortement couplé et en plus ses paramètres physiques peuvent varier sous l'effet thermique et aussi sous l’effet de la charge, [2]. A cela, il faut ajouter que certaines variables ne sont pas accessibles directement à la mesure, et que d'autres, leur mesure coûte chère ou affecte la fiabilité et la robustesse des systèmes d'entrainements, notamment les flux et la vitesse de rotation, ce qui oblige l'utilisation d’estimateurs ou d'observateurs d’état pour reconstruire ces variables non mesurables qui sont nécessaires aux procédures de commande et de surveillance des systèmes motorisés , [1], [3] , [4-8].
Dans ce contexte, les travaux présentés dans ce mémoire portent sur l’élaboration d'algorithmes d'observation et d’observation adaptatif, sujets à de nombreux travaux récents, [19], [21], [24], pour la machine asynchrone dédiés aux systèmes non linéaires, et pour atteindre cela, nous allons procéder comme dans [7] et [21].
Pour atteindre notre objectif nous avons organisé notre mémoire de la façon suivante :
Dans le premier chapitre nous présentons deux parties principaux, le premier est un état de l’art de la machine asynchrone, le deuxième nous présentons la modélisation et le modèle non linéaire de la machine asynchrone, où nous utilisons la transformation triphasé-biphasé pour aboutir à un modèle simplifié. Ensuite, une étude d'observabilité du modèle de la machine pour
Page : 2
aboutir à un modèle observable qui sera utilisé pour la synthèse des observateurs.
Le deuxième chapitre est consacré aux observateurs des systèmes non linéaires. Une classe de modèles de systèmes non linéaires est d’abord considérée, ensuite, nous présentons l’observateur à grand gain pour la machine asynchrone pour but de réaliser une estimation consistante des variables d’état sans capteur mécanique, à la fin de ce chapitre nous avons présenté les résultats de simulation.
Le troisième chapitre consacré à l’observateur adaptatif à grand gain, ensuite, nous présentons le modèle de la machine asynchrone avec mesure de vitesse avec l’observateur adaptatif qui donne les paramètres physique plus les grandeurs magnétiques de la MAS. À la fin nous présentons les résultats de simulation.
Dans le quatrième chapitre nous présentons l’étude de l’observateur à grand gain susceptibles de fournir l'estimation de l'état de la machine asynchrone, notamment le flux rotorique, la vitesse de rotation et couple de charge plus les paramètres physiques dans toute la plage de fonctionnement de la machine asynchrone sans mesure de la vitesse.
Enfin, quelques remarques et perspectives sont données dans la conclusion.
Page 3
I.1. Introduction
La machine asynchrone est très utilisée dans les applications industrielles, à cause de sa simplicité de conception et entretien, son coût qui est relativement inférieur à celui des autres machines et à cause de sa grande robustesse au niveau des grandeurs électromagnétique. La machine asynchrone est utilisée dans des nombreuses applications industrielles y compris les applications à puissances supérieures à quelques kilowatts. La machine est constituée d’un stator et d’un rotor avec une interaction électromagnétique entre eux [Figure (I.1)].
Figure (I.1). Stator et rotor d’une MAS
I.2. Description
La machine asynchrone est une machine à courant alternatif appelée aussi machine à induction [1], elle est constitué d’une partie fixe appelé stator et d’une partie mobile dite le rotor, il est généralement en court-circuit. Les deux parties sont séparées entre eux par l’entrefer.
I.2.1. Principe de fonctionnement
Le principe de fonctionnement du moteur asynchrone est basé sur l’induction des courants dans les bobinages du rotor par un champ tournant dans l’entrefer dû à la circulation des courant polyphasés au stator, ce champ tournant va créer un couple moteur que s’exerce sur les conducteurs des
Page 4
courants induits, il provoque ainsi le démarrage et la rotation du rotor dans le même sens que le champ tournant.
I.2.2. Le stator
Le stator comporte une carcasse en acier renfermant un empilage de tôles minces identiques en forme de couronne qui constituent un cylindre vide ; ces tôles sont percées de trous à leur périphérie intérieure. L’alignement de ces trous forme des encoches dans lesquelles on loge un bobinage triphasé. Cette couronne est serrée dans une carcasse en fonte, [2], [Figure (I.2)].
Figure (I.2). Stator d’une MAS I.2.3. Le rotor
Le rotor, monté sur l’arbre moteur se compose d’un cylindre fait de tôles empilées. Des encoches sont percées à la périphérie extérieure destinées à recevoir des conducteurs. Il est séparé du stator par un entrefer très court de l’ordre de 0,4 à 2 mm seulement. Il existe deux types de rotor : le rotor à cage d’écureuil et le rotor bobiné, [2].
rotor bobiné : un ensemble d’enroulement, généralement triphasé, connecté à des bagues isolées sur lesquelles frottent des ballais en charbon, [1].
Page 5
A cage d’écureuil : formée d’un ensemble de barres conductrices reliées entre elles à chaque extrémité par des anneaux (généralement en cuivre), [1].
Figure (I.3). Différents types de rotor d’une MAS
I.3. Modélisation de la machine asynchrone triphasée
Le modèle de la machine asynchrone est d’abord explicité dans le repère triphasé, ensuite, la transformation mathématique de Park est présentée afin de substituer aux grandeurs électriques des composantes qui vont faciliter les calculs et les représentations.
Le modèle dynamique de la machine asynchrone doit représenter tous les comportements et dynamiques rencontrés durant les régimes permanents ou transitoires. Un tel modèle peut être obtenu au moyen de la théorie des deux axes. Pour ce faire, il est indispensable de poser certaines hypothèses qui ont pour but de faciliter la mise en équations des circuits électriques de la machine. I.3.1. Hypothèses simplificatrices
L'étude de la modélisation des machines asynchrones repose sur le contexte habituel des hypothèses simplificatrices, à savoir :
Page 6
Hypothèse 1 : L'entrefer constant.
Hypothèse 2 : L'effet des encoches négligé.
Hypothèse 3 : La distribution spatiale et sinusoïdale des forces magnétomotrices d'entrefer.
Hypothèse 4 : Le circuit magnétique non saturé et à perméabilité constante.
Hypothèse 5 : L'influence de l'effet de peau et de l'échauffement sur les caractéristiques n'est pas prise en compte.
Parmi les conséquences importantes de ces hypothèses, on peut citer: La constance des inductances propres de la machine. La loi de variation sinusoïdale des inductances mutuelles
entre les enroulements statoriques et rotoriques en fonction
de l'angle électrique de leurs axes magnétiques, [1].
I.3.2. Modèle mathématique de la machine asynchrone
Un modèle mathématique de la machine asynchrone est une traduction du comportement des différents éléments et grandeurs de la machine en utilisant les techniques et les théories mathématiques disponibles, dont le but est de permettre l’application des différents outils de commande, observation, diagnostique,…etc.
La machine asynchrone se compose, comme nous avons déjà parler, d’un stator, portant un bobinage logé dans des encoches et relié à la source d’alimentation et d’un rotor.
Dans notre travail, le moteur asynchrone utilisé est caractérisé par :
la présence d’un seul bobinage triphasé alimenté par une source extérieure au stator.
la présence d’un « bobinage » massif en court-circuit au rotor.
On peut représenter la machine par deux circuits couplés électro- magnétiquement.
Page 7
Figure (I.4). Représentation triphasée simplifiée d’une machine asynchrone Les enroulements des trois phases statorique et des trois phases rotorique dans l’espace peuvent être représentés sur la figure
ci-dessus, [Figure (I.4)]. Les phases rotoriques sont court-circuitées sur
elles-mêmes. est l’angle électrique entre l’axe de la phase ‘a’ statorique et la phase ‘A’ rotorique.
I.3.2.1. Les équations électriques
Les enroulements des trois phases statoriques et également les enroulements des trois phases rotoriques sont décalés dans l’espace d’un angle de En appliquant la loi d’Ohm généralisée à chaque phase du stator (Respectivement rotor), on aura les expressions des tensions des trois phases statoriques et rotoriques , elles s’écrivent sous la forme matricielle suivante :
[
] [
][
]
[
] (I.1.a)
[
] [
][
]
Page 8 Avec :
[
] [
]
;[
] [
]
[
] [
]
;[
] [
]
et :[
] [
] [
] [
].
I.3.2.2. Les équations magnétiques
Les flux et des phases statoriques et rotoriques s’expriment sous la forme suivante:
[
] [
][
] [
][
] (I.2.a)
[
] [
][
]
][
] (I.2.b)
Avec :
[
] [
]
et[
] [
]
.
Les inductances propres des phases statoriques sont égales. Les matrices et s’écrivent :
[
] [
]
,[
] [
]
Avec : : inductance propre d'une phase statorique et d'une phase rotorique,
: inductance mutuelle entre phases statoriques : inductance mutuelle entre phases rotoriques
La matrice des inductances mutuelles entre phases du stator et du rotor [Msr] (telle que [ ] [ ] ) dépend de la position angulaire θ entre l’axe du stator et celui du rotor, [3].
Page 9 Elle s'écrit :
[
] [
]
[
]
(I.3)
étant le maximum de l’inductance mutuelle entre une phase du stator et une phase du rotor.
I.3.2.3. L’équation mécanique
Pour étudier les caractéristiques dynamiques, on introduit l’équation du mouvement suivante :
(I.4)
Avec :
: Moment d’inertie de la partie tournante.
: vitesse mécanique du moteur. : Coefficient de frottement visqueux.
: Couple de charge.
: Couple électromagnétique.
(I.5)
Les expressions de tensions obtenues au dessus sont d’ordre élevé. Ainsi, la matrice [ ] des inductances mutuelles étant à éléments non constants, la résolution de ce système d’équations se heurte à des difficultés insurmontables, particulièrement lors de l’étude des phénomènes transitoires. L’utilisation de la transformation de Park permet de contourner ce problème et d’obtenir un système d’équations à coefficients constants, ce qui facilite sa résolution.
Page 10
La représentation des différentes enroulements et phases, statoriques et rotoriques, en passant vers la représentation biphasée est représentée par la figure suivante :
Figure (I.5). Modèle de Park de la machine asynchrone
I.3.2.4. Transformation de Park
La transformation de Park est constituée d’une transformation triphasée-biphasée suivie d’une rotation. Elle permet de passer du repère (abc) vers le repère ( ) (direct, quadrature et homopolaire) Pour chaque ensemble de grandeur (statorique et rotorique). Pour simplifier les équations (et le modèle par conséquence), le repère de la transformation de Park des gradeurs statoriques et celle des grandeurs rotoriques doivent Coïncider. La transformation de Park est la même pour les courants, les tensions et les flux. Avec la matrice de transformation de Park :
[ θ ] √
[
θ
θ
θ
θ θ
θ
√ √ √]
(I.6)
Avec :Page 11
θ: L’angle entre l’axe d et l’axe As de la figure pour une transformation au stator, ou l’angle entre d et Ar pour une transformation au rotor. Cette angle est égale à :
θ = θ pour la transformation des grandeurs statoriques. θ = θ pour la transformation des grandeurs rotoriques.
Les deux axes d et q, qui serviront à transformer les expressions de la machine sont perpendiculaires et leur position peut être quelconque vue la symétrie cylindrique de la machine, [3].
Figure (I.6). Représentation schématique de la transformation des enroulements réels en enroulements équivalents (Transformation de Park) Les grandeurs (courants, tensions et flux) transformées du système biphasé sont égales à la matrice de Park multipliée par les grandeurs du système triphasé. Dans le cas où le neutre de la machine n’est pas relié, les composantes homopolaires sont nulles. Après avoir effectué les transformations précédentes, les expressions des tensions de la machine asynchrone triphasée dans le référentiel de Park généralisé seront données par les expressions suivantes :
[
] [ ][
]
(I.7)
Page 12 Au stator
(I.9.a)
(I.9.b)
Au rotor(I.10.a)
(I.10.b)
AvecDe plus, les composantes des flux statoriques et rotoriques peut êtres données par les expressions suivantes :
Au stator
(I.11.a)
(I.11.b)
Au rotor(I.11.c)
(I.11.d)
I.3.2.5. Choix du référentiel
Le référentiel est le système (d, q). Dans notre cas, nous adoptons un seul référentiel pour le rotor et le stator. Il existe trois possibilités de choix du référentiel, [4]. Parmi les relations que nous venons de présenter, les seules qui soient affectées par le choix du référentiel sont les équations électriques (tension statorique et tension rotorique).
I.3.2.5.1. Référentiel fixe par rapport au stator
Ce système d'axe lié au stator est immobile, dans ce cas θ ce qui implique que Le repère d’axe est, maintenant, nommé , avec d →α et q→β, le modèle de la machine peut être donné (selon les deux axes par les équations électriques suivantes:
Page 13
(I.12.a)
(I.12.b)
(I.13.a)
(I.13.b)
I.3.2.5.2. Référentiel fixe par rapport au rotor
Il correspond aux transformations des grandeurs de la machine dans un référentiel tournant à la vitesse de synchronisme, c.-à-d. :
Les équations électriques sont données par :
(I.14.a)
(I.14.b)
Pour les tensions rotoriques:
(I.15.a)
(I.15.b)
Ce référentiel est particulièrement avantageux dans l’étude des régimes transitoires où la vitesse de rotation du rotor est considérée comme constante, par exemple pour l’étude des contraintes résultant d’un court-circuit.
I.3.2.5.3. Référentiel fixe par rapport au champ tournant
La condition qui régit ce cas est: a
=
s.Les équations électriques du moteur sont données par :
(I.16.a)
(I.16.b)
Page 14
(I.17.a)
(I.17.b)
C'est le seul référentiel qui n'introduit pas de simplification dans les équations de la machine. Il est utilisé pour les technique de commande à flux orienté, dans les problèmes d'alimentation des machines asynchrones par convertisseur statique de fréquence, et lorsqu'on veut étudier la fonction de transfert du moteur par rapport à de petites variations de la vitesse autour d'un régime donné.
I.3.2.6. Expression du modèle linéaire de la machine
Le modèle linéaire est une forme mathématique, où, on cherche à exprimer les variables en fonction d’une variable explicative, mais d’une manière linéaire. Pour la machine asynchrone le modèle linéaire sera exprimé dans le cas où le référentiel est considéré lié au stator (le repère . On peut choisir les flux rotorique
et
en plus des courants statoriques
et comme variables d’état, en se basant sur les équations précédentes, de
(I.11)
jusqu’à (I.13)
.Pour exprimer les équations différentielles de ces deux grandeurs nous procédons de la manière suivante :
A partir des équations
(I.11)
on obtient :(I.18.a)
(I.18.b)
Et de l’équation(I.12),
on a:
(I.19.a)
(I.19.b)
On utilise
(I.11)
pour déduire les expressions des courants rotoriques, qu’ils s’écrivent :Page 15
(I.20.a)
(I.20.b)
Et après dérivation, on aura:
(I.21.a)
(I.21.b)
Si on remplace les équations
(I.19.a)
et(I.21.a)
dans(I.18.a),
on obtient :
(I.22.a)
De la même manier, on remplace
(I.19.b) et (I.21.b)
dans(I.18.b)
on obtient :
(I.22.b)
Pour les équations des flux rotoriques, on obtient ces deux expressions à partir de l’équation (I.13) :
(I.23.a)
(I.23.b)
On remplace
(I.20.a)
dans(I.23.a)
et(I.20.b)
dans(I.23.b)
pour obtient :(I.24.a)
(I.24.b)
Donc, après avoir déterminé les équations des courants statoriques et des flux rotoriques, on aura le système linéaire dynamique de la machine (d’ordre 4) :{
(I.25)
Page 16
Où :
,
,
,
et en fin
.
Ce système peut être donné sous la forme matricielle standard des systèmes linéaire suivante :
(I.26)
Avec :[
]
,
[
]
,
[
]
et
[
]
: Le vecteur d’état.: La matrice d’évolution du système. : La matrice de command.
: Le vecteur de command.
I.3.2.7. Modèle non linéaire de la machine asynchrone
Basé sur le système linéaire (I.25) on peut déduire un système non linéaire seulement en ajoutant l’équation de vitesse
suivante :
Page 17
{
(I.27)
Le modèle non linéaire de la machine asynchrone s’exprime sous la forme non linéaire globale de la façon suivante :
(I.28)
Avec : [ ] [] [ ] , [ ]. : Le vecteur d’état.
: La fonction dynamique du système. : La matrice de command.
: Le vecteur de command. I.3.2.8. Choix des sorties
Le choix des sorties est effectué en fonction de l’objectif du travaille, c.-à-d. le choix sera pour la commande ou pour l’observation.
Pour l'observation, les sorties (états mesurables) sont les courants statoriques et la vitesse :
(
) (I.29)
Page 18
(
)
Mais pour les techniques sans capteurs on choisit comme vecteur de sorties mesurés les courants statoriques (parce qu'ils sont disponibles et faciles à mesurer), alors :
(
) (I.30)
Maintenant, et après avoir effectué le choix des grandeurs de sortie, le modèle de la machine peut être redonné sous la forme standard et étendue des systèmes non linéaires perturbés suivante :
{ ̇
(I.31)
Où :(
)
(
)
(
),
(
)
*
+
et[
]
.
Les variables
et sont respectivement les courants statoriques , les fluxes rotoriques , la vitesse et le couple de charge. Les matrices intervenantes dans le modèle au dessus sont :
[
],
*
+
*
+,
(
) *
+.
I.4. Observabilité de la machine asynchrone
Pour étudier l’observabilité de la machine asynchrone, il faut écrire le modèle de la machine
(I.31)
sous la forme canonique observable considérée, écrite dans les nouvelles cordonnées, elle est donnée par :Page 19
{ ̇
(I.32)
(
) ,
(
) ,
(
) ,
(
) , [
] ,
(
)
Maintenant, et afin de pouvoir mettre le modèle de la machine sous cette forme canonique observable
(I.32)
, nous allons effectuer un changement de variables (de cordonnées). Pour ce faire, on utilisera une transformation usuelle qui permet de récrire le modèle du moteur sous une la forme triangulaire observable :,
(
)
(
)
(I.33)
Où les transformations { } [ ] est définie par :̇
̇
((
)
(
))
(I.34)
En dérivant les nouvelles variables
par rapport au temps, on obtient : ̇ ̇ ( )
(I.35.a)
̇
̇
(
) ̇
( ) ( ) ( )
Page 20
(
)
((
)
(
))
(
)
(I.35.b)
̇
̇
̇
̇
̇
(I.35.c)
Par conséquent, on peut montrer que la transformation de l'état ci-dessus
met le système
(I.31)
sous la forme canonique observable(I.32)
, avec :̇
̇
(
)
̇ ̇ ̇ ̇ ̇
(I.36)
La transformation considérée
permet ainsi de récrire le modèle du moteur asynchrone
(I.31)
sous la forme triangulaire :,
̇
̇
̇
(I.37)
Et comme la forme triangulaire donnée par
(I.32)
est observable pour toute entrée, on peut conclure que le modèle(I.36)
du moteur asynchrone est observable pour toute entrée si et seulement si la transformation est un difféomorphisme ou d’une manière équivalente si et seulement sa matrice jacobéenne est inversible.Compte tenu des relations
(I.34)
de définition de la transformation, la matrice jacobéenne est donnée par :
[
]
(I.38.a)
Page 21
[
[
]
[
]
*
+ *
+
]
[
]
Cette matrice est régulière si et seulement si la matrice suivante est régulière :
[
] *
+ (I.38.b)
Où :( ̇
)
(
)
Une telle décomposition montre clairement que la matrice est de rang plein si et seulement si sa sous-matrice est aussi de rang plein. Dans la suite de cette analyse, on doit se concentrer sur la matrice afin de présenter une condition suffisante sous laquelle cette matrice, ou de manière équivalente , est de rang plein (inversible). Et à partir de la structure de
qui dépend de
donnée précédemment, il est clair que la matrice
est une matrice carrée inversible pour tout
.
La matrice peut-être factorisée de la manière suivante :
(I.39)
Avec :
*
Page 22
Et tenant compte des structures de ces deux dernières matrices et
, on peut en déduire que est régulière si et seulement si la matrice suivante est de rang plein :
[
] [
]
(I.40)
D’une manière équivalente, ces deux colonnes et sont linéairement dépendantes. Sachant que et de la matrice sont déterminées à partir des expressions
(I.38) et (I.40) :
( ̇ ( ̇ ) ) ( ̇ ( ̇ ) ) ( ̇ ( ̇ ) )
Avec :
( ) ()
(I.41)
Maintenant et à partir des expressions et
, il apparaît clairement qu'elles sont linéairement dépendantes si et seulement si les variables et sont aussi linéairement dépendantes. Cela est équivalent à . Cette condition peut être exprimée sous la forme plus explicite suivante :
((
̇
(
̇
)
))
̇
̇ ( )(I.42)
Page 23
On peut conclure que la transformation est difféomorphisme (ce qui
implique que le modèle considéré de la machine est observable) si et seulement si :
̇
̇( )
(I.43)
Ou d’une manière équivalente en utilisant les variables originales du moteur :
̇
̇
(I.44)
La condition
(I.44)
peut être exprimée sous différentes forme, par exemple en fonction de la phase de flux rotorique définie par(
)
soit :̇
̇( )
(I.45)
D’une manière équivalente, en prenant l’intégrale des deux membres, l’expression suivante :
(
)
ne doit pas être constante.
(I.46)
Cette condition a été obtenue en utilisant le modèle du moteur qui permet de déterminer la dérivée par rapport au temps de la phase du flux du rotor, soit ̇ ̇
,
tout en excluant le cas qui n’a aucun sens physique. La condition(I.45)
est aussi similaire à celle obtenue dans [5] et que cette condition stipule que le modèle de la machine est observable. Comme il a été montré, aussi, qu'il est possible d'exprimer la condition(I.43)
en fonction du couple de charge comme il est montré dans [6], on peut aboutir à la condition suivante :
(
Page 24
Enfin, une démarche compréhensive a été adoptée pour exhiber des conditions équivalentes d’observabilité du moteur asynchrone. Ces conditions peuvent être utilisées pour réaliser une synthèse ingénieuse d’observation ou de commande sans capteurs mécaniques et de concevoir des expériences adéquates pour étudier les performances du moteur asynchrone.
I.4. Résultats de Simulation
Dans ce qui suit, nous allons essayer de représenter les résultats de simulation pour une machine asynchrone (les paramètres sont donnés sur Annexe A), cette machine est supposée alimentée directement par le réseau triphasé (220/380 V). Nous avons utilisé le programme Matlab afin de simuler le fonctionnement de la machine et de visualiser la vitesse mécanique, et le courant statorique qui sont considérés (par la suite) comme des mesure. Les autres variables, tels que les flux, le couple électromagnétique sont aussi disponible en simulation, mais, on a préféré de ne pas les mettre, pour garder dans notre esprit que nous ne disposons que de la mesure du courant statorique et de la vitesse de rotation.
En simulation, nous avons insérer après le démarrage de la machine, un couple de charge en augmentation (Cr =8N.m) appliqué à l'instant (t=2.5 s). Les résultats de simulation sont représentés par les figures suivantes :
Figure (I.7). Vitesse de la MAS
0 1 2 3 4 5 0 50 100 150 temps (sec)
(
ra
d
/se
c)
Cr est appliquéPage 25
Figure (I.8). Courant
statorique de la MAS
0 1 2 3 4 5 -30 -20 -10 0 10 20 30 temps(sec) Is (A ) Is alpha Is beta 1 1.02 1.04 1.06 1.08 1.1 -10 -5 0 5 10 Is alpha Is beta ZOOME
temps (sec)
Is
(
A
)
Page 26
Lors du démarrage de la MAS, on remarque une augmentation importante du courant statorique, cette augmentation s’atténue avec l’évolution du régime transitoire, et c’est tout à fait normal pendant le démarrage des machines électriques. En régime transitoire, on remarque une augmentation linéaire de vitesse, avec une tendance à osciller à cause de l’inertie des masses tournantes et du coefficient d’amortissement du aux faibles valeurs des flux. Mais aussi une diminution de la vitesse à l’instant 2.5 seconds, la raison bien sûr c’est l’insertion du couple en cette instant, en conséquence, une augmentation du courant est enregistré.
I.5. Conclusion
Ce chapitre a été consacré à la modélisation de la MAS. Le passage du modèle triphasé au modèle de Park, facilite la manipulation des équations et réduit le nombre de variables dans le modèle, et enfin le modèle non linéaire de la machine asynchrone sous forme de représentation d'état, par la suite, l'observabilité de la machine est mise en examen, ce qui nous a permis de mettre un modèle et une condition d'observabilité suffisante du moteur asynchrone. Cette condition sera prise en compte dans le prochain chapitre pour réaliser une synthèse d’un observateur pour le moteur asynchrone.
Page 27
II.1 Introduction
Au cours des dernières années, une importante activité de recherche a été consacrée à la conception et l'amélioration des techniques sans capteurs pour la commande et la surveillance des machines électriques. Beaucoup de problèmes d'observation et de commande ont été étudiés par l'application des différentes techniques utilisant les modes glissants, les principes du grand gain et leur version adaptative, ce qui a conduit à diverses contributions fondamentales avec des évaluations expérimentales réussit, [7-16].
Dans ce chapitre, nous allons présenter d'abord la classe des systèmes non linéaires considérés, qui est une forme canonique d'observabilité proposé par [17], ensuite, nous allons donner la structure de l'observateur à grand gain correspondant qui se distingue par sa simplicité, [17-20]. Ensuite, nous allons entamer la présentation de notre contribution faite à partir de la théorie de cet observateur qui est : L’étude et l’application à la machine asynchrone d’un observateur du type grand gain qui permet de réaliser une estimation relativement consistante des grandeurs magnétiques et mécaniques, uniquement à partir des courants et tensions statoriques disponibles à la mesure. Cet observateur peut être ensuite utilisé pour la synthèse de n’importe quel système de commande pour réaliser les performances requises d’un asservissement des moteurs asynchrones.
II.2. Notion d’observateur d’état
Un observateur est un système dynamique qui permet de réaliser une estimation admissible des variables d´état d’un système à partir des mesures des signaux d’entré et de sorties les plus simple [Figure (II.1)]. Si nous considérons la classe générale des systèmes non linéaire, l’équation
(II.1)
est une représentation simplifiée du système dynamique dit observateur qui donne l’estimation ̂ de tous les variables du système :Page 28
Figure (II.1). Schéma de principe d’un système observateur
La conception et la synthèse d’observateurs pour les systèmes dynamiques a introduit une nouvelle notion et dimension pour le développement des systèmes de commande ou d’observation. En effet, la notion d’observabilité des systèmes constitue une étape préalable avant la conception ou la synthèse d’un observateur pour un système dynamique donné. Cela signifie que l’observabilité d’un système doit nécessairement être étudiée avant de justifier de l’existence ou non d’un observateur pour ce système.
Dans le chapitre précédent, nous avons donné la définition de l’observabilité d’un système, et dans ce qui suit, nous rappelons certains observateurs les plus communément utilisés, d’abord pour des systèmes linéaires et ensuite pour des systèmes non linéaires.
II.3 Observateurs pour systèmes linéaires
Il existe plusieurs types d’observateurs pour les systèmes linéaires, mais, les plus connus et les plus ancien sont : l’observateur de Luenberger destiné pour les systèmes linéaires stationnaires (LTI Systèmes) et l’observateur de Kalman pour les systèmes linéaires variantes (LTV Systèmes). La structure de ces deux observateurs représente la forme de base sur laquelle repose le développement de tous les autres observateurs.
Observateur
Système
( )
L’état estimé ̂( )
( )
Page 29
II.3.1 Observateur de Luenberger
L'estimation d'état est réalisée par un modèle dynamique dont la sortie sera précisément ̂( ) et l'entrée sera constituée de l'ensemble des informations disponibles, c'est-à-dire, l’entrée du système à observer ( )
( )
. La structure de l’observateur de Luenberger est de la forme :, ̂
̇( ) ̂( ) ( ) ( ( ) ̂( ))
̂( ) ̂( )
(II.2)
Où, il apparaît clairement le terme correctif en fonction de l'erreur de reconstruction de la sortie
( ) ̂( )
et le gain de correction appelé gain de l'observateur de Luenberger, il est à déterminer en imposant des pôles choisis après un placement des pôles du système, [21]. Cette structure peut être écrite sous la forme suivante :̂̇( ) ( ) ̂( ) ( ) ( ) ( ) (II.3)
Le principe de l’observateur de Luenberger peut être représenté par la figure suivante [Figure (II.2)] :Figure (II.2). Principe de l'observateur de Luenberger Observateur ∫
Système (A, B, C) + + +
( )
( )
̂( )
Page 30
II.3.2 Observateur de type Kalman
Cette classe d’observateurs convient aux systèmes linéaires variant dans le temps de la forme:
{ ̇
( ) ( )
( ) ( ) ( ) ( ) ( )
(II.4)
Où les matrices
( )
et( )
sont des matrices variables et connues à chaque instant. La particularité de cet observateur est son gain variant avec le temps, il est obtenu par la résolution de l’équation algébrique différentielle de Ricatti, [21]. L’observateur de type Kalman est représenté par le système suivant :, ̂
̇( ) ̂( ) ( )
( ̂( ) ( ))
̂( ) ̂( )
(II.5)
Avec est la solution de l’équation suivant :
̇
(II.6)
Le paramètre est une constante positive. Notant que, pour tout
suffisamment grand, le système dynamique donné par l’équation (II.5) est un observateur pour le système donné par l’équation (II.4). Le principe de l’observateur de type Kalman peut être donné par la figure suivante [Figure(II.3)] :Figure(II.3). Principe de l'observateur de type Kalman Système ( ( ) ( ) ) ( ) ∫
( )
( )
̂( )
( )
Page 31
Dans ce qui suit, nous allons présenter un troisième type d’observateur, c’est l’observateur de type grand gain, que nous allons particulièrement utilisés dans notre travail d’estimation de l’état, dans ce chapitre, et des paramètres du système au chapitre suivant.
II.3.3. Observateur de type grand gain
La synthèse des observateurs du type grand gain a reçu une attention particulière comme l’indique le nombre de contributions fondamentales qui lui ont été consacrées [23], [21]. On présente, dans ce qui suit, un résultat fondamental sur la conception d’un observateur qui se distingue par sa simplicité de mise en œuvre et son caractère unificateur des synthèses des observateurs de type grand gain [22], [21]. Il concerne la classe des systèmes non linéaires multi-variables uniformément observables qui peuvent se réécrire sous la forme canonique observable modulo un changement de coordonnées suivante :
{ ̇ ( )
(II.7)
où :(
,
( )
(
( ) ( ) ( ))
,
(
+
(
)
Avec
,
pour
et
,
désigne l’état du système. Les grandeursun compacte dans et
désignent respectivement l’entrée du système et la sortie mesurée du système et est une fonction qui vérifie l’hypothèse intrinsèque à une synthèse du type grand gain, en l’occurrence, la fonction a une forme particulière exigée par rapport à
,
uniformément en.
Page 32
L’observateur proposé dans [21], permet de réaliser une estimation précise des variables d’état du système
(II.7), il
est décrit par ce système : ,̂̇( )̂ ( ̂) (̂( )
( ))
̂( )
̂( )
(II.8)
où
̂
n’est autre que l’´etat estimé du système que l’on peut décomposercomme suit :
̂
(
̂ ̂ ̂)
avec
̂
.
La matrice
est une matrice diagonale donnée par :
(
) (II.9)
Le paramètre est un scalaire positif comme nous avons déjà dit, la matrice est la solution de l’équation algébrique de Lyapunov suivante :
(II.10)
Le principe de l’observateur à grand gain est donné par la figure suivante [Figure(II.4)] :
Figure(II.4). Principe de l’observateur à grand gain
̇ ( )
Système
C
( ̂)
∫
̂̇
̂
Page 33
II.4. Application de l’observation d’état à la machine asynchrone
Cette partie est consacrée à l’application de l’observation à grand gain de l’état à la machine asynchrone, sans capteur mécanique. Cet observateur permet de réaliser une estimation relativement consistante des grandeurs magnétiques et mécaniques, uniquement, à partir des mesures disponibles des courants et des tensions statoriques. Cette partie concerne, également, la synthèse d’un observateur de type grand gain pour la classe des systèmes perturbés donnée au chapitre précédent [6]. La classe des systèmes perturbés considérée est redonnée par le système dynamique (II.11), cette classe concerne le modèle étendu non linéaire de la machine asynchrone en tenant compte des perturbations venant de la charge, par conséquence, les performances de l'observateur à réaliser seront assurées, notamment la robustesse en stabilité par rapport aux perturbations et à la perte d’observabilité dans certaines conditions de fonctionnement, voire le modèle de la machine donné par l’équation (I.31). Le schéma suivant illustre les étapes que nous devons suivre pour pouvoir mettre en œuvre cet observateur [Figure(II.5)].
Figure(II.5). Diagramme descriptif des étapes de conception de l'observateur. Modèle de la MAS (Cordonnés Originales
) Transformation Doit être un difféomorphisme Modèle de la MAS sous une forme triangulaire
(Nouvelles Cordonnées )
Vérification de la condition d'observabilité
Conception d'observateur pour la forme triangulaire
(Nouvelles Cordonnées ̂) Transformation ̂ ̂ Observateur pour la machine (Cordonnés Originales
̂
)Page 34
II.4.1. Conception d’observateur à grand gain pour la machine asynchrone Dans ce qui suit, nous allons présenter l’observateur à grand gain pour la classe des systèmes non linéaires perturbés décrits par :
{ ̇
( )
(II.11)
Avec :(
,
, ( ) , () ( (
) (
) (
)) ,
( ) et
(
)
où , pour et , et désignent respectivement l’entrée et la sortie du système et est une fonction bornée qui représente les perturbations qui affectent le système dues au variations de la charge. Ce système doit être réécrit sous la forme canonique d’observabilité après avoir effectué une transformation basée sur un changement de variable (le principe est donné par la figure au-dessus) qui représente un difféomorphisme, cette transformation est la suivante :
(II.12)
elle permet d’obtenir la forme triangulaire d’observabilité suivante :
{ ̇
( ) ( )
(II.13)
Avec :(
,
,(
)
, () ( (
) (
) (
)) ,
(
( ) * en
Page 35
(
)
et
( )
est une matrice de perturbationbornée.
Comme la forme triangulaire (II.13) est observable pour toute entrée, [17], il est possible de concevoir un observateur du système dans les coordonnées en
,
on peut noter que les cordonnées enn’ont pas un sens physique, et c’est pour cette raison que nous devrons revenir au coordonnées originales avec l’écriture du modèle de l’observateur dans les cordonnées d’origine
x
. Cette étape est essentielle pour avoir des résulta exploitable et ayant un sens physique. Cette opération nécessite la détermination de l'inverse de la matrice Jacobéenne de ta transformation , Cette inversion matricielle pourrait induire des problèmes de singularité. Pour éviter ce problème on peut calculer seulement une partie de l’inverse de la matrice Jacobéenne, on utilise la décomposition suivante :(
( ))
( )
( ) (II.14)
Où
( )
est une matrice bloc triangulaire supérieure et( )
est une matrice bloc triangulaire inférieure satisfaisant la condition structurelle suivante :( ) (
( ))
( ) (II.15)
qui est une matrice bloc triangulaire inferieure avec des zéros sur la diagonale. En effet, le système dynamique suivant est un observateur du système considéré, il est caractérisé par une simplicité de mise en œuvre et une convergence admissible de l’erreur d’estimation des grandeurs observer :
̂̇
(
̂)
(
̂)
(
̂)
̂
̂
(II.16)
Page 36
̂ (
̂
̂
̂
,
,̂
(
̂
̂
̂
)
, (̂) ( (
̂) (
̂) (
̂))
.
Encore une fois, sont les variables de l’état estimé, les termes
, et sont des éléments liés à la conception des observateurs à grand gain,et enfin, est un scalaire positif.
Pour pouvoir revenir au coordonnés originales nous devons rappeler que :
̇
( )
̇ (II.17)
Si nous multiplions les deux termes de l’équation
(II.16)
par le terme on obtient : ̂̇ ̂ ( ̂) ( ( ̂)* ( ̂ ) ̂ ( ̂) ( ̂ ) ( ( ̂)* (( ( ̂)* ( ̂) ) ( ̂ )(II.18)
On peut maintenant retrouver l’expression de (II.16) à partir de cette équation, mais, si en utilisant l’inverse du Jacobine
(
)
,
on obtient l’observateur dans le cordonnées d’origine :̂̇ ( ̂) ( ( ̂)* ( ̂ )
(( ( ̂)* ( ̂)+ ( ̂ )
( ̂) ( ̂) ( ̂ )
(II.19)
Alors, si on arrive à déterminer l’inverse de la matrice Jacobéenne, on peut donner le modèle de l’observateur dans les cordonnées d’origine. On a déjà vu