LA RECUPERATION DES DERIVEES
Développement d'une nouvelle méthode d'estimation des
dérivées avec une étude de convergence
Mémoire présenté
à la Faculté des études supérieures de l'Université Laval dans le cadre du programme de maîtrise en mathématiques
pour l'obtention du grade de Maître es sciences (M.Sc.)
FACULTÉ DES SCIENCES ET DE GÉNIE UNIVERSITÉ LAVAL
QUÉBEC
2010
L'adaptation de maillage peut être très utile dans l'application de la méthode des éléments finis à certains problèmes physico-mathématiques. L'adaptation est une pro-cédure qui nécessite, entre autres, des algorithmes efficaces de calcul des dérivées de fonctions de type Pk ou Qk- Des méthodes d'estimation des dérivées ont donc été éla-borées pour résoudre ce problème. Ce travail consiste à expliquer au lecteur ce qu'est exactement la récupération des dérivées et à dresser une liste des méthodes classiques qui sont utilisées de nos jours. Nous développons aussi une nouvelle méthode de ré-cupération pour les fonctions de type Pi qui est, à plusieurs égards, beaucoup plus performante que les méthodes classiques. Un aspect intéressant de cette nouvelle mé-thode est qu'elle est globale et qu'elle n'a ainsi pas besoin de traitement spécial sur le bord des maillages.
En tout premier lieu, je tiens à mentionner que ce mémoire a été élaboré en col-laboration avec le groupe interdisciplinaire de recherche en éléments finis (GIREF) de l'Université Laval. Je tiens donc à souligner le professionnalisme et la grande cama-raderie de ces gens qui ont travaillé avec moi durant mes années d'études de second cycle. Pour mes tests numériques, j'ai utilisé, en autres, le code maison du GIREF qui est MEF++. Grâce à MEF++, j'ai pu coder rapidement les améliorations et les tests nécessaires à ce travail. J'ai aussi été le bénéficiaire d'une bourse d'études du CRSNG durant mes deux années de maîtrise et j'en remercie donc cette institution.
Je veux tout particulièrement remercier André Fortin, Michel Fortin et Éric Cham-berland qui m'ont fait découvrir ce sujet si intéressant qu'est la récupération des déri-vées. Ils m'ont permis de travailler sur leur nouvelle méthode de récupération qu'ils ont élaborée en 2009. Grâce à eux, j'ai pu modifier et améliorer à ma guise cette méthode pour pouvoir présenter mes résultats et mes conclusions dans ce mémoire. André, qui a été mon directeur de mémoire, a toujours été très disponible, et ce, surtout quand rien ne fonctionnait dans mes algorithmes. Je le remercie grandement pour ses nombreux conseils et sa disponibilité inconditionnelle. Michel, quant à lui, passait régulièrement dans les locaux du GIREF pour voir les avancements des travaux des étudiants. Il a toujours été très patient avec moi et il me proposait toujours de très bonnes idées pour améliorer la méthode de récupération. Finalement, Éric m'a fourni ses codes, ses scripts et ses tests numériques pour que je puisse continuer le travail qu'il avait commencé sur la méthode de récupération. Il m'a été d'une aide immense à chaque fois que j'éprouvais de la difficulté avec le système informatique.
Je veux dédier ce mémoire à mes amis. C'est avec eux que j'ai eu autant de plaisir à vivre et à découvrir. C'est avec eux que ma vie a été et est enrichissante. Je pense tout particulièrement à mes collègues et amis de ma cohorte du baccalauréat en mathéma-tiques (en statismathéma-tiques aussi). On a toujours été un groupe très serré et j'ai beaucoup aimé étudier et fêter avec eux. On se voit encore après deux ans et j'espère que cela continuera. Je ne veux pas nommer de noms de peur d'en oublier, mais les intéressés se
reconnaîtront sans aucun doute.
Je veux remercier tous les professeurs du département de mathématiques de l'Uni-versité Laval. J'ai adoré suivre mes cours dans ce département avec eux et je suis content de m'être enrichi des notions et des idées que les mathématiques m'ont apportées. Les mathématiques n'ont jamais été pour moi qu'une simple matière académique, mais plu-tôt une philosophie de vie. J'espère toujours travailler dans le futur avec des gens aussi passionnés que mes professeurs de mathématiques.
Je veux remercier mes parents Hélène et Donald d'avoir lu ce mémoire et de m'avoir donné des remarques précieuses sur ce dernier. Je veux aussi remercier André Fortin, Diane Pouliot et Alexandre Couët pour avoir lu et corrigé ce travail. J'en profite du même coup pour remercier les examinateurs de mon mémoire.
Wisdom is not a product of schooling, but of the lifelong attempt to acquire it. Albert Einstein
Résumé ii Avant-Propos iii
Table des matières vii Liste des tableaux viii Table des figures ix 1 Introduction 1
1 La récupération des dérivées : les concepts 3
2 Préliminaires 4 2.1 Objectif 4 2.2 Définitions et notations 6
2.3 La méthode des éléments finis 13 2.4 L'ordre de convergence d'une méthode de récupération 17
2.5 Points superconvergents 18 2.6 Fonctions utilisées dans les exemples 21
3 Les méthodes classiques de récupération des dérivées 24
3.1 La méthode par patch de Zienkiewicz et Zhu 24 3.2 La méthode par patch de Zhang et Naga 28 3.3 La méthode par patch de Belhamadia, Fortin et Chamberland 35
3.4 Autres méthodes de récupération 38
II Une nouvelle méthode de récupération 40
4 Les bases de la méthode F F C 41 4.1 La méthode FFC unidimensionnelle 41
4.1.1 FFC avec des éléments linéaires sur le segment 43 4.1.2 FFC avec des éléments quadratiques sur le segment 46 4.1.3 FFC avec des éléments cubiques sur le segment 49
4.2 Analyse de la superconvergence de FFC 53
4.2.1 Analyse du cas linéaire 54 4.2.2 Analyse du cas quadratique 57 4.3 La méthode FFC en plusieurs dimensions 59
4.3.1 FFC avec les quadrangles et les hexaèdres 62
4.4 Quelques exemples et résultats numériques 63
5 Stabilisation de la méthode F F C 70 5.1 La méthode FFC avec patch 71 5.2 La méthode FFC avec un nouveau terme de stabilisation 72
5.3 Résultats numériques 76
6 Conclusion 80 Bibliographie 82 A Résultats numériques en norme infinie 84
2.1 Points superconvergents et points de Gauss sur le segment [—1,1]. . . . 21
5.1 Paramètres utilisés pour les tests numériques 76 A.l Paramètres utilisés pour les tests numériques 84
2.1 Fonction//, continue et derivable par morceaux 5
2.2 Représentation de / ' et de f'h 5
2.3 Maillage régulier 9 2.4 Maillage hasardé à 15% 10
2.5 Maillage non régulier 10 2.6 Maillage adapté à partir de la fonction fix, y) = e-ioo[(*-i/2)2+(j,-i/2)*] n
2.7 Élément de type Px 14
2.8 Élément de type P2 14
df2
2.9 Fonction f2 et sa dérivée partielle --r— 22
ox
dfs
2.10 Fonction U et sa dérivée partielle —— 23
ox
3.1 Patchs sur un maillage régulier 25 3.2 Points d'évaluation (triangles) sur un patch pour le Pi et le P2 26
3.3 Points d'évaluation (triangles) sur un patch pour le Qi et le Q2 26
3.4 Patchs élargis de la figure 3.1 27 3.5 ZZ en Pi appliquée à /i sur un maillage uniforme de 4 éléments et courbe
d'erreurs en norme L2 28
3.6 ZZ en Pi appliquée à f2 (dérivée partielle en x) sur un maillage régulier
de 8192 éléments et courbe d'erreurs en norme L2 29
3.7 ZZ en Pi appliquée à /3 (dérivée partielle en x) sur un maillage régulier
de 8192 éléments et courbe d'erreurs en norme L2 29
3.8 Différence ol —— obtenue avec ZZ. 30
ox v
3.9 ZN en Pi appliquée à /i sur un maillage uniforme de 4 éléments et courbe
d'erreurs en norme L2 33
3.10 ZN en Px appliquée à /2 (dérivée partielle en x) sur un maillage régulier
de 8192 éléments et courbe d'erreurs en norme L2 33
3.11 ZN en Pi appliquée à /3 (dérivée partielle en x) sur un maillage régulier
de 8192 éléments et courbe d'erreurs en norme L2 34
d h
3.12 Différence ol ——- obtenue avec ZN. 34 dx
3.13 BFC en Pi appliquée à f2 (dérivée partielle en x) sur un maillage régulier
df3
3.15 Différence ol —-— obtenue avec BFC. 38 4.1 FFC en Pi appliquée à /x avec e^ = 10~6/i sur un maillage uniforme de
4 éléments et courbes d'erreurs en norme L2 44
4.2 Fonction propre du noyau de la méthode FFC en Pi 45 4.3 Courbes d'erreurs en norme L°° pour la récupération de la fonction /i
en Pi avec e/j = 10~6h pour la méthode FFC. 45
4.4 FFC en P2 appliquée à f\ avec t\, = 10-6/i sur un maillage uniforme de
4 éléments et courbes d'erreurs en norme L2 48
4.5 FFC en P2 appliquée à f\ avec eh = 0 et Ohiyo) = ""'(i/o) sur un maillage
uniforme de 4 éléments et courbes d'erreurs en norme L2 48 4.6 FFC en P3 appliquée à /i avec e/i = 10~6h sur un maillage uniforme de
4 éléments et courbes d'erreurs en norme L2 51
4.7 FFC en P3 appliquée à /i avec eh = 0 et Ohiyo) = u'iîJo) sur un maillage
uniforme de 4 éléments et courbes d'erreurs en norme L2 51 4.8 Courbes d'erreurs en norme L°° pour la récupération de la fonction fi
en P3 avec e/j = 10~6h pour la méthode FFC. 52
4.9 Courbes d'erreurs en norme L°° pour la récupération de la fonction /i
en P3 avec e/i = 0 et Ohiî/o) = u'iyo) pour la méthode FFC. 53
4.10 Points d'interpolation du maillage en Pi 54
4.11 Points d'interpolation du maillage en P2 57
4.12 Le vecteur w sur une arête entre deux éléments Pi 60
4.13 Ajout d'«arêtes» sur le quadrangle 63 4.14 FFC en Pi appliquée à f2 (dérivée partielle en x) avec e^ = 10~6/i sur
un maillage régulier de 8192 éléments et courbes d'erreurs en norme L2. 64 4.15 FFC en Pi appliquée à f2 (dérivée partielle en x) avec €h = 10~6/i sur un
maillage hasardé à 15% de 8192 éléments et courbes d'erreurs en norme
L2 64
4.16 FFC en Pi appliquée à f2 (dérivée partielle en x) avec e/j = 10-6/i sur
un maillage adapté de 6344 éléments et courbes d'erreurs en norme L2. 65 4.17 FFC en Pi appliquée à /3 (dérivée partielle en x) avec e/i = 10"6/i sur un
maillage hasardé à 15% de 8192 éléments et courbes d'erreurs en norme
L2 66
4.18 FFC en Pi appliquée à /3 (dérivée partielle en x) avec eh = I0~6h sur
un maillage régulier de 8192 éléments et courbes d'erreurs en norme L2. 66 d h
4.19 Différence ol — — obtenue avec FFC. 67 dx
4.20 Courbes d'erreurs en norme L°° pour les méthodes de récupération en Pi appliquées à f2 sur une suite de maillages réguliers avec eh = 10~6/i
pour FFC. 68 4.21 Courbes d'erreurs en norme L2 pour les méthodes de récupération en Pi
appliquées à /3 sur une suite de maillages réguliers avec e^ = 10~2h pour
FFC. 68 4.22 Courbes d'erreurs en norme L°° pour les méthodes de récupération en
Pi appliquées à /3 sur une suite de maillages réguliers avec eh = 10~2/i
pour FFC. 69 5.1 Patch T typique sur lequel nous imposons les valeurs de BFC aux noeuds. 71
5.2 Fonction distance fdist sur le carré 73 5.3 Fonction distance à la puissance 8 sur le carré : /|i s t 74
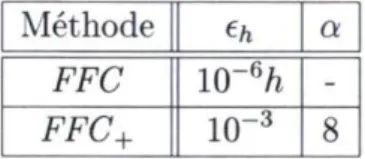
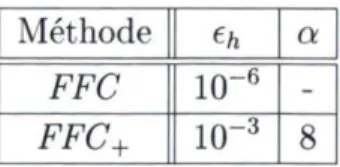
5.4 Courbes d'erreurs en norme L2 (gauche) et L°° (droite) pour les méthodes de récupération en P3 appliquées à /i avec e/, = 10- 3 et a = 8 pour FFC+
iOmeth = OZN) 75
5.5 Courbes d'erreurs en norme L2 pour les méthodes de récupération en Pi
appliquées à f2 sur une suite de maillages réguliers 77
5.6 Courbes d'erreurs en norme L2 pour les méthodes de récupération en Pi
appliquées à f2 sur une suite de maillages hasardés à 15% 77 5.7 Courbes d'erreurs en norme L2 pour les méthodes de récupération en Pi
appliquées à f2 sur une suite de maillages adaptés 78
5.8 Courbes d'erreurs en norme L2 pour les méthodes de récupération en Pi
appliquées à /3 sur une suite de maillages réguliers 78
5.9 Courbes d'erreurs en norme L2 pour les méthodes de récupération en Px
appliquées à /3 sur une suite de maillages hasardés à 15% 79 5.10 FFC+ en Pi appliquée à /3 (dérivée partielle en x) avec e/j = 10- 3 et
df3
a = 8 sur un maillage régulier de 8192 éléments et différence al — — . 79 ox
A.l Courbes d'erreurs en norme L°° pour les méthodes de récupération en
Pi appliquées à f2 sur une suite de maillages réguliers 85 A.2 Courbes d'erreurs en norme L°° pour les méthodes de récupération en
Pi appliquées à f2 sur une suite de maillages hasardés à 15% 85 A.3 Courbes d'erreurs en norme L°° pour les méthodes de récupération en
Pi appliquées à f2 sur une suite de maillages adaptés 86 A.4 Courbes d'erreurs en norme L°° pour les méthodes de récupération en
Pi appliquées à /3 sur une suite de maillages réguliers 86 A.5 Courbes d'erreurs en norme L°° pour les méthodes de récupération en
Introduction
Une vaste majorité des lois de la physique et des sciences sont constituées d'équa-tions différentielles qui contiennent une multitude de variables et qui s'appliquent sur l'espace et le temps. Ces variables sont des fonctions qui peuvent représenter la vi-tesse, la pression, la température, l'humidité, des champs magnétiques/électriques et bien d'autres valeurs. Un grand défi des mathématiciens appliqués est de trouver les solutions de ces équations. La réputation quant à la difficulté de certains problèmes n'est plus à faire et, plus souvent qu'autrement, ceux-ci n'ont même pas de solutions analytiques. C'est pourquoi les mathématiques appliquées s'emploient méthodiquement à trouver des méthodes pour les résoudre et obtenir ainsi des solutions approchées.
Il est clair qu'à notre époque, l'ordinateur est un outil essentiel pour faire les cal-culs numériques requis aux méthodes et aux algorithmes que nous utilisons. Avec les capacités et les vitesses de calculs des ordinateurs d'aujourd'hui, nous pourrions nous attendre à pouvoir résoudre, d'une manière adéquate, tous les problèmes d'équations différentielles possibles. Or, il n'en est rien. En effet, comme les méthodes numériques donnent des solutions approximatives, il faut la plupart du temps, pour pouvoir aug-menter la précision des solutions, augaug-menter aussi le nombre de calculs que doit faire l'ordinateur. Cependant, avec les problèmes complexes auxquels nous faisons face au-jourd'hui, ce nombre de calculs est beaucoup trop important et cela nécessite des jours, voire des semaines pour ne résoudre qu'un seul de ces problèmes.
Un exemple de méthode numérique sur laquelle nous nous attarderons est la méthode des éléments finis. Cette méthode a fait ses preuves et plusieurs théorèmes démontrent son efficacité et sa flexibilité. Pour pouvoir appliquer cette méthode, il faut d'abord découper le domaine sur lequel nous cherchons les variables. Nous appelons éléments les petits morceaux que nous découpons. Le regroupement de ces éléments est ce que
nous appelons le maillage. Plus le découpage est fin, plus la solution sera précise, mais plus le calcul sera important et donc prendra du temps. En contrepartie, pour diminuer le temps de calcul, il suffit de réduire le nombre d'éléments. Il faut donc bien choisir le nombre d'éléments utilisés et faire des compromis.
Généralement, les compromis s'avèrent mauvais tant pour le temps de calcul que pour la précision. Une solution a donc été proposée. Au lieu de prendre des éléments de même taille, il suffit de prendre des éléments de grandes tailles là où la solution varie peu et de prendre beaucoup d'éléments de petite taille là où elle change de valeur subitement. Nous appelons cette procédure l'adaptation de maillage. C'est une façon de découper le domaine qui permet de calculer convenablement la solution, mais en ne conservant qu'un nombre raisonnable d'éléments et donc en ayant un temps de calcul assez court.
Un nouveau problème est donc apparu pour les mathématiciens appliqués. Com-ment bien adapter le maillage? Cette question est loin d'être simple et nous ne nous y attarderons pas précisément. Il faut savoir cependant que la notion de «variation» de la solution est importante. En effet, les méthodes d'adaptation utilisent en général les dérivées premières et secondes de la fonction pour fournir un maillage convenable. La principale méthode utilise la notion de métrique définie à partir du hessien de la solution (Hecht et Mohammadi [6]). Des méthodes plus récentes n'ont besoin que des dérivées premières (Bois et al. [2]). Plus les dérivées premières et secondes sont impor-tantes autour d'un point, plus il faut adapter autour de celui-ci. Et si la dérivée est nulle ou presque dans une région, il n'est généralement pas nécessaire de mettre beau-coup d'éléments pour y capter la solution de manière adéquate. C'est précisément sur le calcul des dérivées que ce travail est basé. Comment calculons-nous convenablement les dérivées partielles d'une solution numérique définie sur un maillage ? Voilà la question à laquelle nous tenterons de répondre.
Beaucoup de travail a été fait dans le domaine de la récupération des dérivées de fonctions définies par morceaux. Ce qui est intéressant, c'est que nous avons réussi à obtenir de très bonnes approximations des dérivées. Nous allons montrer qu'elles convergent de la même manière que la fonction d'origine.
Dans les chapitres suivants, nous commencerons d'abord par passer en revue cer-taines méthodes classiques utilisées à l'heure actuelle. Cela nous permettra de bien faire comprendre au lecteur la mécanique qu'il y a derrière la récupération des dérivées. Par la suite, nous élaborerons une nouvelle méthode de récupération qui se base sur un concept différent des méthodes utilisées jusqu'alors. Plusieurs exemples suivront pour montrer l'efficacité et la faisabilité de cette méthode.
La récupération des dérivées :
les concepts
Préliminaires
Nous utilisons dans ce mémoire les notations les plus fréquemment utilisées dans la littérature. Certaines notations conventionnelles sont employées sans définition préa-lable pour ne pas surcharger ce chapitre. Nous redirigeons le lecteur à un livre d'intro-duction aux éléments finis comme celui de Ciarlet [3] s'il éprouve des difficultés dans ce contexte.
2.1 Objectif
L'objectif principal de ce travail est de faire une «bonne» estimation des dérivées d'une fonction fn continue et derivable par morceaux définie sur un maillage. Nous allons montrer ici pourquoi ce problème n'est pas évident. Nous avons représenté gra-phiquement la réinterpolation fh de la fonction /(x) = x2 — sinh(4x)/ sinh(4) sur un maillage \ D linéaire par morceaux (voir la figure 2.1). Nous remarquons que la réin-terpolation fh est dans ce cas-ci constituée de segments sur chaque élément. Plus les éléments sont petits, plus la fonction ressemble à son expression algébrique / . Cepen-dant, si nous dérivons fh sur chacun des éléments du maillage, alors nous obtenons une représentation de la dérivée f'h un peu décevante (voir la figure 2.2). Comme nous pouvons le voir, la dérivée f'h n'est pas continue et diffère passablement de la vraie déri-vée algébrique f i x ) = 2x — 4cosh(4x)/sinh(4). Cela s'explique par le fait que fh n'est pas assez régulière sur le maillage. Cependant, si nous ne possédons pas de meilleure représentation que fh comme approximation de / , alors il est plutôt difficile de trouver une bonne représentation pour / ' .
0 1 5
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
FlG. 2.1 - Fonction fh continue et derivable par morceaux.
0 5
°.
s — ® -Dérivée de / Dérivée de //, 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 FlG. 2.2 - Représentation de / ' et de f'h.Heureusement, plusieurs chercheurs ont publié des articles qui donnent des solutions au problème d'irrégularité de f'h. Leurs méthodes d'estimation des dérivées sont aussi appelées des méthodes de récupération des dérivées. Notre objectif principal dans ce travail sera de développer une nouvelle méthode de récupération des dérivées. Nous voulons obtenir des dérivées qui seront du même «type» que leur fonction d'origine fh- L'aspect du problème qui nous intéressera le plus sera lorsque fh est linéaire par élément (de type Pi), et ce, dans une, deux ou trois dimensions.
Dans les sections suivantes, nous allons définir rigoureusement ce que nous voulons dire par fonctions de type Pk/Qk- Cela nous permettra de bien expliquer la forme des fonctions tracées sur les figures 2.1 et 2.2.
2.2 Définitions et notations
Tout d'abord, le problème que nous avons présenté se place dans un contexte qui em-ploie en général la méthode des éléments finis (Ciarlet [3]). Il faut donc bien comprendre les principes de base de cette méthode numérique. Cependant, la théorie derrière celle-ci est très riche. L'analyse fonctionnelle est au coeur des grands théorèmes qui démontrent l'existence de solutions et la convergence des approximations numériques vers ces so-lutions analytiques. Comme nous parlerons de convergence dans les chapitres suivants, il est primordial que les espaces fonctionnels et les normes associées qui sont utilisées soient bien définies.
Le plus simple ensemble fonctionnel sur lequel nous travaillons est l'espace des fonc-tions intégrables.
Définition 1
Soit tt Ç R™ un ensemble ouvert, l'espace des fonctions intégrables sur ft est,
L\tt) := If : tt -> R | f \f\dtt < oo} .
Si l < p < oo, l'espace des fonctions dont la p, e m e puissance est intégrable sur ft est noté,
L
pitt) := {/ : tt -> R | f
p€ L\tt)} .
Finalement, l'espace des fonctions L°° sur fi est noté,
- { '
L°°itt) := { f : tt -* R | sup |/| < oo n
Lorsque tt est borné, nous avons L°°(Q) Ç L?(Çt) Ç Lqitt) (p > q > 1). Dans le contexte des éléments finis, le domaine tt est plus souvent qu'autrement borné. Donc, tous ces espaces de fonctions se retrouvent dans L1. Cependant, c'est l'espace L2 qui nous intéressera le plus. Ces espaces vectoriels sont des espaces de Banach avec les normes respectives suivantes,
Lijn := f \f\dtt,
»
:
= [/„iH'
/P
-L P
L^n := sup|/|. n
Si / : tt —> Rm est une fonction vectorielle / = ( / i , . . . , /m) , nous utilisons alors l'abus de notation suivante :
"m T 1/P LP,Q '■= Z^\\fi\\PLP,n
i=l
Nous avons aussi besoin d'espaces un peu plus fins qui incluent les dérivées des fonctions / . Nous les nommons les espaces de Sobolev et ils sont définis de manière similaire aux espaces LP.
Définition 2
Soit tt Ç Rn un ensemble ouvert, l ' e s p a c e d e S o b o l e v Wm , p défini s u r ft est
Wm>pitt) := {/ G Lpitt) | Daf e Lpi t t ) , 0 < \a\ < m } ,
où m > 0 et où oo > p > 1. De plus, a est un multiindice et Daf représente une
dérivée partielle de f au sens des distributions.
Encore une fois, ces espaces sont des espaces de Banach. Leurs normes sont les suivantes : I/P E \\Daf\\PLP,n wm<p,n _0<|a|<m wn.oo Q : = m a x | | Z )a/ | | z , c » n. 0<|a|<m
Comme pour les espaces IP, le cas le plus important est p = 2. Les espaces de Sobolev Wm'2 sont tous des espaces de Hilbert et nous utilisons une notation spéciale pour les représenter,
Hmitt) := Wm'2(Q), Vm > 0.
Nous remarquons alors que L2(Q) = H°itt) = W°'2itt). Pour simplifier, nous notons aussi les normes des espaces de Sobolev,
a,2 Q, Vm > 0.
m,n •— \\J \\w
Nous avons alors que ||/||y:2,n = ||/||o,n Par exemple, si tt Ç R", nous pouvons écrire les normes explicitement de la façon suivante :
J U i = l OXi
où les dérivées sont prises au sens des distributions. Nous utilisons aussi quelques fois une semi-norme sur iP(f2),
-,1/2
l/lu» :=
Pour terminer avec les espaces de Sobolev, nous utilisons aussi un sous-ensemble pratique de /^(fi). Si F est un sous-ensemble de dtt qui est la frontière de tt, alors nous considérons l'ensemble suivant,
Hftll) := {/ € H\Sl) | / |r = 0 p.p.}
Ici, le symbole p.p. signifie presque partout, c'est-à-dire que / est nulle partout sur T sauf, peut-être, sur un sous-ensemble de F de mesure nulle. La mesure employée ici est bien sûr la mesure de Lebesgue. Nous utilisons aussi la notation H^itt) :— Hg^itt). De plus, la semi-norme |/|i,n devient une norme sur H^tt), si F n'est pas un ensemble de mesure nulle.
Nous avons défini les espaces fonctionnels précédents en considérant que tt était un sous-ensemble ouvert de R". En pratique, nous allons toujours prendre tt borné. Dans l'étude de l'efficacité et de la précision des méthodes que nous allons développer, il est très important de posséder de bonnes normes afin de calculer les erreurs engendrées. En général, nous utiliserons la norme L2 et la norme L°°. Il est à noter que la norme L°° est un supremum. Les suprémums sont en général difficile à évaluer exactement. Il faut donc utiliser beaucoup de points d'évaluation pour s'approcher de la bonne valeur. Ces normes sont fréquemment utilisées pour déterminer l'importance des erreurs dans le contexte de la méthode des éléments finis.
Pour pouvoir appliquer la méthode des éléments finis, il faut en premier lieu scinder tt en une collection disjointe finie de sous-ensembles que nous appelons éléments Ki. La réunion de tous ces éléments forme ce que nous appelons un maillage de tt. En pratique, les éléments Kj sont des formes géométriques simples comme des pavés ou des simplexes (des quadrangles et des triangles en 2 dimensions), et ce, pour des raisons évidentes de calculs numériques. En effet, il est plus facile de calculer précisément une intégrale sur un triangle que sur une forme géométrique quelconque.
Nous noterons en général ces discrétisations tth- Le terme h signifie tout simplement que le domaine a été maillé plus ou moins finement. Par contre, il arrive souvent qu'on attribue une longueur h à un maillage pour désigner la taille moyenne des éléments. Il y a plusieurs façons de calculer la taille d'un élément. Pour ne pas compliquer les
choses, nous dirons que h représente la longueur de la plus grande ou de la plus petite des arêtes du maillage. Dans un maillage régulier, les arêtes sont en général toutes du même ordre de grandeur, donc prendre la plus grande longueur ou la plus petite ne change pas grand chose.
Quatre grands types de maillages retiennent notre attention pour ce travail. Les tous premiers maillages utilisés avec la méthode des éléments finis étaient faits à la main et représentaient des pavés uniformes sur tt. Nous appelons maillages réguliers les maillages dont les éléments sont tous les mêmes à un retournement près (voir la figure 2.3). Ces maillages sont donc périodiques et ils sont, encore aujourd'hui, largement utilisés dans les geometries simples.
FlG. 2.3 - Maillage régulier.
Les maillages hasardés sont des maillages réguliers que nous avons modifiés en dé-plaçant aléatoirement les sommets tout en gardant la structure du domaine tt (voir la figure 2.4). Les sommets sont déplacés avec au plus une certaine proportion de h. Ces maillages sont intéressants, car, sans être trop déformés, ils permettent de supprimer la périodicité des maillages réguliers. Cette périodicité peut parfois donner des résultats superconvergents qui ne tiennent plus sur des maillages non réguliers et hasardés.
Ensuite, il y a les maillages non réguliers (voir la figure 2.5). Ces maillages sont générés à l'aide d'algorithmes qui placent les sommets des éléments un peu n'importe où dans tt tout en respectant une certaine homogénéité dans la position de ces som-mets. Bien que les éléments n'aient pas la même taille h, ils sont toutefois presque de la même dimension et nous pouvons encore utiliser un h pour désigner la taille moyenne
FlG. 2.4 - Maillage hasardé à 15%.
des éléments. Ces maillages sont incontournables lorsque tt est un domaine de forme complexe. Par exemple, tt pourrait représenter une pièce mécanique. Dans ces situa-tions, il est quasiment impossible de construire un maillage à la main et encore moins un maillage régulier.
FlG. 2.5 - Maillage non régulier.
Finalement, il y a les maillages adaptés (voir la figure 2.6). Ces maillages sont gé-nérés à partir d'une fonction / de base. Le but d'un maillage adapté est de réduire l'erreur d'interpolation commise sur / . Les algorithmes qui génèrent les maillages
adap-tés mettent beaucoup d'éléments là où / varie grandement et peu là où / est presque régulière. Les maillages adaptés sont de plus en plus utilisés, car ils ont démontré leur efficacité dans maints problèmes. Les dérivées partielles sont utilisées dans la majo-rité des algorithmes d'adaptation de maillage et ce mémoire développe justement une méthode pour récupérer ces valeurs.
X ^ 7 \ . ^ " / ^ v ,~-^" / \ t f ^ /
/ms
v X<c
\WÊË sfl\
H \
"<ss \xVM9i5^ \ \ - ^ \ \X ^
^ \ \ y^x\
FIG. 2.6 - Maillage adapté à partir de la fonction fix,y) = e-"»[(*-i/2)2+(i/-i/2)2]
Nous utiliserons le maillage régulier de la figure 2.3 comme maillage de base pour nos tests pour plusieurs raisons. Premièrement, pour pouvoir comparer nos résultats avec les autres publications qui emploient des maillages réguliers. Deuxièmement, pour obtenir une méthode qui est efficace même sur les maillages réguliers, car, en raison de leur périodicité, il arrive parfois que certains algorithmes ne soient pas efficaces sur ces maillages. Troisièmement, pour pouvoir faire des études de convergence. Bien sûr, nous allons faire des tests sur des maillages non réguliers pour montrer que notre méthode y est tout aussi efficace.
Avant d'expliquer les principes de la méthode des éléments finis, il faut aussi cons-truire les fonctions que nous utiliserons sur les maillages en question. Nous travaillons avec les plus simples fonctions d'interpolations utilisées. Ce sont les fonctions de La-grange, c'est-à-dire des fonctions qui sont des polynômes sur chaque élément.
Définition 3
Soit un maillage tth composé de triangles en 2D ou de tétrahèdres en 3D. On dit qu'une fonction f définie sur tth est de type Pk p a r morceaux si, sur chaque élément de tth, f est un polynôme de degré au plus k. De plus, on dit que f est de type Pk si elle est aussi continue.
Il est à noter que pour une fonction de plusieurs variables, nous considérons le degré d'un polynôme comme étant le maximum des sommes des puissances de ses monômes, c'est-à-dire, par exemple, que le polynôme /(x, y) = 3x3y + y2 est de degré 4. Nous pouvons aussi regarder le degré d'un polynôme en fonction de chacune de ses variables et nous utilisons en général la notation Qk.
Définition 4
Soit un maillage tth composé de carrés en 2D ou de cubes en 3D. On dit qu'une fonction f définie sur tth est de t y p e Qk p a r morceaux si, sur chaque élément de tth, f est un polynôme de degré au plus k par rapport à chaque variable. De plus, on dit que f est de type Qk si elle est aussi continue.
La définition 4 n'est pas assez générale étant donné que nous avons souvent des maillages qui sont constitués de parallélogrammes ou de parallélépipèdes plutôt que de carrés ou de cubes. Cependant, nous pouvons étendre cette définition pour englober ces éléments.
Définition 5
Soit un maillage tth composé de parallélogrammes en 2D ou de parallélépipèdes en 3D. On dit qu'une fonction f définie sur tth est de type Qk p a r morceaux si, sur chaque élément K de tth, f ° TK est un polynôme de degré au plus k par rapport à chaque variable (Tx est une transformation linéaire entre un carré ou un cube selon la dimension et l'élément K). De plus, on dit que f est de t y p e Qk si elle est aussi continue.
Par exemple, le polynôme /(x, y) = 3x3y est de type Q3 sur le maillage [0, l]2 consti-tué de carrés. La distinction entre ces types de fonctions est utile pour la construction des polynômes d'interpolation dans la méthode des éléments finis, car les éléments em-ployés ne sont pas toujours les mêmes. Pour ce qui est des fonctions en une dimension, les définitions de Pk et de Qk se recoupent et nous employons seulement la notation P^. Définition 6
Soit un maillage tth unidimensionnel. On dit qu'une fonction f définie sur tth est de t y p e Pk p a r morceaux si, sur chaque élément de tth, f est un polynôme de degré au plus k. De plus, on dit que f est de type Pk si elle est aussi continue.
2.3 La méthode des éléments finis
Nous allons maintenant esquisser les grandes lignes de la méthode des éléments finis (Ciarlet [3]). Pour illustrer cette méthode, nous montrons un exemple d'un problème résoluble par la méthode des éléments finis. Soit T une fonction de type C2(fi) qui est la solution d'une équation différentielle aux dérivées partielles d'ordre 2 avec des conditions aux limites.
' - V - (fc(x)VT(x)) = - r(x)
Vxett,
T(x) = = 0
vx € r
0,
l *(*)*£> -
= 9i%)
Vx G Ti.(2.1)
Cette équation est appelée l'équation de la chaleur où T représente la température et A;(x) est le coefficient de conductivité thermique. Cette équation est aussi appelée l'équation de Laplace. De plus, tt représente un domaine de R" fermé et borné tandis que la frontière de tt est notée dtt. Nous supposons que r0 et Ti forment une partition dedtt.
La méthode des éléments finis n'est pas la seule alternative pour résoudre cette équation. Par contre, le procédé par lequel nous discrétisons tt vu dans la section 2.2 est très général. Cette équation différentielle est ce que nous appelons la formulation forte du problème. Nous savons de plus que (2.1) possède une solution unique (Ciarlet [3]). De l'équation différentielle (2.1), nous obtenons une formulation variationnelle standard que nous appelons aussi formulation faible du problème,
( aiT,4>) = m V 0 € / #o( n ) , . . T|r o = 0 p.p., { 2 J } ou, aiT,(j)) := / kVT-V(t)dtt, Jn lifjf) ■= [ r (p d t t + [ g(j)dFi Jn JTI
Par le théorème de Lax-Milgram (Ciarlet [3]), nous savons que (2.2) possède une solution unique. Ici, nous ne cherchons plus T G C2(Q), mais plutôt T G i/p()(Q) pour que (2.2) ait un sens. Cette formulation se trouve dans un espace de fonctions de dimension infinie. Pour ramener ce problème à un espace de dimension finie, c'est ici que la construction des polynômes de type Pk ou de type Qk nous est utile. Nous discrétisons d'abord tt en un maillage tth- Nous supposons ici que le domaine est dans le plan R2 et nous construisons un maillage constitué de triangles.
Comme les fonctions que nous utilisons sur tth sont des polynômes sur chaque élé-ment, il est inutile de conserver ces fonctions à proprement parler. Il suffit de ne conser-ver que certaines valeurs de ces fonctions sur des points bien choisis que nous appelons points d'interpolation. Ainsi, avec les valeurs des fonctions en ces points, il est possible de reconstruire les fonctions entièrement. Cette façon de faire est très pratique et très générale en interpolation. Par exemple, si nous avons un élément triangulaire et qu'une fonction / est de type Pi sur celui-ci, il suffit de conserver les valeurs de / aux som-mets du triangle. Pour une fonction de type P2, par contre, il faut aussi prendre plus de points d'interpolation. Les points situés au milieu des arêtes font l'affaire (voir la figure 2.7). Il y a beaucoup de façons de choisir les points d'interpolation. Pour plus de
FlG. 2.7 - Elément de type Pi. FlG. 2.8 - Elément de type P2.
détails, nous invitons le lecteur à se référer à un ouvrage sur les éléments finis (Ciarlet [3]). L'important ici est de savoir que ces points existent et que ce sont sur eux que nous voudrons éventuellement récupérer les valeurs des dérivées.
Ainsi, après avoir construit le maillage tth qui nous convient et en ayant choisi les points d'interpolation des éléments, nous pouvons simplifier le problème (2.2) de dimension infinie en un problème de dimension finie,
a(Th,d>h) = li<f>h)
Th\r o = 0
y<t>h G pki t t h ) ,
p.p. (2.3)
Bien sûr, nous ne cherchons plus une fonction T directement dans Hk (fî), mais plutôt dans les sous-espaces Pk ou Qk pour être strictement dans un espace de di-mension finie. Les solutions pour différents maillages tth seront notés 2V Ces solutions existent et sont uniques selon le théorème de Lax-Milgram qui s'applique encore ici. Évidemment, puisque nous résolvons dans des sous-espaces de dimension finie, nous ne
pouvons qu'espérer que les Th soient de bonnes approximations de la solution T. Par contre, pour ce problème précis, nous savons que T/, —» T (/i —» 0) sous la norme H1 si k > 1 (Ciarlet [3]).
Il y a beaucoup de théories relatives à la méthode des éléments finis pour déterminer si une suite de fonctions T/,, solutions de l'équation faible sur tth, convergera vers la solution de l'équation forte sur tt. Nous ne nous attarderons pas sur ce sujet et nous considérerons toujours, lors de la récupération des dérivées, que nous avons déjà la solution T que nous réinterpolerons au besoin sur l'espace P* ou
Qk-Puisque les fonctions que nous utilisons sont maintenant de type Pk ou de type Qk, nous pouvons maintenant les expliciter selon une combinaison linéaire de fonctions bien choisies. En considérant que Nh est le nombre de points d'interpolation de tth et qu'une fonction fh est de type Pk/Qk, nous pouvons écrire,
Nh
fh(x) = EiMMx)- (2-4)
j = i
Les fonctions fy que nous utilisons sont les fonctions d'interpolation de Lagrange de type Pk/Qk,
i i \ 1 si i = j ^ ) : = | o si i ^ j '
où les yi sont les points d'interpolation. De nombreuses variantes existent pour le choix des fy comme les fonctions d'Hermite ou les bases hiérarchiques.
Nous remarquons donc que fhiljj) = ifh)j- De plus, toutes les fonctions fy forment une base de l'espace P ^ t t ^ / Q k ^ h ) - Pour les fonctions Pk/Qk par morceaux, l'écriture est un peu plus délicate. En effet, entre deux éléments, la continuité n'est pas forcément assurée. Ainsi, à l'intérieur d'un élément K Ç tth, nous aurons,
Nh
hix) = tf(x) =
Y.(fh)iM*)-3 = 1Sur le bord dK d'un élément, il faut faire attention. Pour que fh soit bien définie, il faut porter une attention particulière sur chaque partie du maillage commune à plusieurs éléments. Par contre, plusieurs types de calculs relatifs à la méthode des éléments finis comme l'intégration ne portent que sur l'intérieur des éléments. Donc, le calcul des valeurs de fh sur dK n'est pas nécessaire dans ces situations.
L'équation (2.3) peut être réécrite en un grand système linéaire. Pour simplifier la notation, nous allons considérer que nous utilisons du type Pk. Alors, si nous utilisons
les fonctions d'interpolation de Lagrange fy, nous obtenons,
( " h
Y,(Th)A<t>j,<t>i) = l(<f>i) v ^ e Pf c( f ih) ,
n\
r o= 0
(2.5)
Il existe bien sûr d'autres façons de faire. Par exemple, nous ne sommes pas obligés de prendre les fonctions fy de cette façon dans (2.5). Par contre, toutes les méthodes de ce type forment un système linéaire,
ou, b, ATh = b, = aify,(j)i), = K<f>i), = i(Th)1,...1{Th)N h)t.
Les inconnues sont les iThjj, mais la matrice A n'est pas inversible à priori. En fait, il faut utiliser les conditions aux limites sur r0. Cela sert à fixer certaines valeurs de (T/Jj. Nous rendons ainsi le système linéaire résoluble.
Nous avons expliqué beaucoup de concepts ici qui ne sont pas primordiaux pour le sujet de ce travail. Pour ne pas perdre de vue l'objectif initial, nous allons expliquer pourquoi il est important d'étudier minutieusement les méthodes de récupération des dérivées. L'écriture de (2.4) nous donne un moyen simple de calculer la dérivée de fh,
Nh
V/„(X) = J2ifh)3^fyix). (2.6)
3=1
Il faut faire attention ici, car les fonctions 4>j ne sont pas dérivables à priori sur le bord des éléments. Pour remédier à ce problème, nous pouvons utiliser le concept de limite. Si la limite n'est pas unique sur l'intersection de deux éléments, il suffit de choisir l'une des deux limites. Comme nous l'avons dit un peu plus tôt, les valeurs de fh et de Vfh sur le bord des éléments ne sont pas importantes pour les calculs que nous en faisons.
Ainsi, nous remarquons que si fy est de type Pk/Qk, alors Vfy est de type Pk-i/Qk-i par morceaux. Ceci est un peu désagréable si nous désirons récupérer les dérivées de fh de même type que fh elle-même. De plus, nous allons voir dans la section suivante pourquoi cette façon de calculer les dérivées n'est pas efficace.
2.4 L'ordre de convergence d'une méthode de
récu-pération
En termes généraux, une méthode numérique est dite d'ordre l si l'erreur qu'elle engendre est au moins 0(/i') dans la norme appropriée. Le paramètre h est générale-ment une longueur entre deux points d'interpolation. Plus cette longueur est petite, plus l'approximation obtenue est bonne. Ainsi, il est important, lorsque c'est possible, d'utiliser des méthodes numériques d'ordre élevé.
Dans le contexte de la méthode des éléments finis, il est d'autant plus crucial d'avoir une bonne méthode avec un bon ordre de convergence, car le nombre de calculs à effectuer en plusieurs dimensions devient rapidement important en fonction de h. En général, si nous utilisons une interpolation de type Pk/Qk, alors les approximations Th obtenues en (2.5) sont d'ordre fc + 1 en norme L2(Q). Nous avons donc,
\\T-Th\\0,çi<Citt)hk + l. (2.7)
Par contre, un point important et un problème que nous voulons résoudre est la perte d'un ordre lorsque nous prenons les dérivées,
||VT - VTft||0,n = \ T - Th\hn < C(Q)/ifc. (2.8)
Il est impossible pour une suite de fonctions Pk/Qk d'avoir un ordre de convergence plus élevé que k + 1 en norme L2 sauf si la fonction dont nous faisons une approximation est aussi de type Pk/Qk- Dans ce dernier cas, l'erreur sera évidemment nulle. Ainsi, si Uh est une suite de fonctions de type Pk/Qk qui sont des approximations de u, alors || Vu — Vufc||o,n ne pourra converger qu'au plus à l'ordre k. Cependant, si nous tentons de récupérer les dérivées de la suite Uh, alors la perte d'un ordre en norme L2 n'est pas inévitable.
Définition 7
Soit un maillage tth d'un domaine tt dont les éléments sont de taille h. Soit Uh une suite de fonctions de type P* sur tth qui sont des approximations de u de degré k. Soit Oh une suite de fonctions de type Pk récupérée (i.e. calculée) à l'aide de la suite de fonctions Uh, alors on dit que la suite Oh est superconvergente s'il existe C(fi) G R telle que,
\ \ V u - oh\ W n < C i t t ) hh + 1. (2.9)
Certaines publications (Pinto [10], Zienkiewicz et Zhu [13]) utilisent la notion de superconvergence sous une autre norme, et ce, dans un autre contexte. Un point xp sera
dit superconvergent, ultraconvergent ou hyperconvergent sous la suite 07, si nous avons respectivement,
\\Vu{xp) - ah(xp)\\2 < C hk +\ \\Vu(xp) - ah(xp)\\2 < Chk + 2, \\Vu{xp)-ah{xp)\\2 < Chk + 3,
où ||.||2 est la norme euclidienne standard ||(a, b, c)\\2 := \/a2 + b2 + c2.
Le comportement numérique de ||Vu(xp) — Ohixp)||2 ne nous intéressera pas pour ce travail, car il change trop selon le point xp choisi. Nous désirons plutôt regarder le comportement des méthodes de récupération d'une façon globale sous les normes L2 et L°°. Par contre, pour développer la nouvelle méthode de récupération de la partie II, nous nous intéresserons aux points superconvergents et à leurs positions sur les éléments.
2.5 Points superconvergents
Comme nous l'avons vu dans la section 2.4, les points dits superconvergents ont une propriété particulière qui peut être définie plus rigoureusement.
Définition 8
Si KfcU est la réinterpolation Pk de u sur un maillage dont les éléments sont de taille h. Alors, on dit que le point xp est superconvergent si,
Vu(xp) = V5Rfcu(xp) + Oihk + 1). (2.10)
La définition 8 porte seulement sur du P*, mais nous pouvons étendre cette définition sur du Qk sans problème. La réinterpolation SR^u est facile à calculer quand nous avons la base des fonctions d'interpolation de Pk,
3Rfcu(x) := ^2uiyj)fyix).
Nous verrons qu'il est pratique d'utiliser les points de superconvergence dans nos calculs de récupération des dérivées. Nous allons donc construire quelques points de superconvergence dans cette section. Nous commencerons par le cas Pi sur un simplexe non dégénéré.
Nous supposons que les sommets du simplexe F Ç Rn sont y0, y\, ■. ■, yn Nous avons alors n + 1 fonctions de réinterpolation pour le type Pi. Soit u une fonction quadratique de type P2 que nous exprimons en développement de Taylor autour de y0,
u(x) = u(uo)+ < d(yo), x y0 > + < //(x y0), x y0 > .
Nous remarquons que H est la matrice hessienne de u et qu'elle est constante, car u est de type P2. Dans ce cas précis, pour trouver les points de superconvergence, nous devons résoudre,
Vu(x) = V3îiu(x). (2.11)
Le terme 0(/i2) n'est pas présent, car nous avons pris u de type P2 justement pour le retirer. Si nous développons le terme de droite de (2.11), nous avons,
V3ftiu(x) = V5ti (u{yo)+ < d i y0) , x y0 > + < H ( x y o ) , x y0 > ) = V (u(y0)+ < d(îfo), x y0 > + < Hy0, y0 > < Hy0, x > +SRi— < Hx,x >J = V (u(y0)+ < d(yo), x y0 > + < Hy0, y0 > < Hy0, x > n j + E ô <HV i i y j > MX) 3 = 0 Z n i = rf(y0) Hy0 + J 2 ô < HVvVj > V<t>j(x) j = o A
Si nous réécrivons cette formule dans (2.11), nous obtenons,
n j
d(y0) + Hix y0) = diy0) Hy0 + ]T < Hy}, yj > Vfyix). 3=0 ~
Finalement, en simplifiant, nous trouvons les points de superconvergence xp, car les V0j(x) = V0i sont des fonctions constantes,
Hxp = J T < HV j, Vj > Vfy. (2.12) 3=0
-Bien sûr, nous remarquons que ces points dépendent à priori du choix de H et donc de la fonction u qui est de type P2. D'après la définition 8, nous ne savons pas si les points xp sont indépendants de u. Cela est très fâcheux pour le calcul des points de
superconvergence en plusieurs dimensions. Par contre, en dimension 1, nous avons une simplification qui intervient, car H est une constante que nous prenons non nulle. Ainsi, sur le simplexe de dimension 1 (le segment), nous obtenons un point superconvergent,
*p = \ { M + M ) = \(yo + Î/I) , (2.13) qui n'est rien d'autre que le point milieu. En effet, <j>'0 = ~_} et fy =
v\ y o ^L Î/I y o
Nous pouvons aussi calculer les points superconvergents pour k > 1, mais il est plus difficile de faire une étude sur le simplexe en général dans ces cas. Nous nous limiterons donc au segment. Nous prenons u de type Pk+i Ainsi, nous devons avoir l'égalité suivante aux points de superconvergence selon la définition 8,
u'(x) = 0Rfeu(x))'. (2.14)
Nous pouvons écrire u(x) = Kfcu(x) +Ub(x). Ici, ub est une fonction «bulle» qui est nulle aux points d'interpolation {yo,yi, ■ ■ ■ ,yk} de P^. Donc,
k
ub(x) = CQf l ( x y j) . (2.15)
j = 0
Puisque u(x) = 3?fcu(x) + u&(x), l'équation (2.14) devient,
u'b(x) = 0. (2.16)
Autrement dit, nous cherchons les points où u'b est nulle. Ces k zéros sont uniques et ne dépendent pas de u. De plus, ils peuvent être calculés en résolvant l'équation suivante,
Uixyj)) =0. (2.17)
Kj=0 j
Il est à noter que les points de superconvergence dans le cas d'un maillage en une dimension, en plus de ne pas dépendre de u, peuvent être calculés sur chaque élément séparément. En d'autres mots, ces points ne dépendent pas de la structure générale du maillage. Ils peuvent donc être calculés une fois pour toutes et ensuite mis en mémoire. Bien que nous n'ayons pas explicitement l'expression pour les points superconvergents, nous pouvons toutefois calculer numériquement leur valeur si nous en avons besoin grâce à la formule (2.17). Dans le tableau 2.1, nous avons inscrit quelques points superconver gents et quelques points de Gauss sur l'intervalle [—1,1] pour montrer que ces valeurs ne sont pas du tout les mêmes.
degré Points superconvergents degré Points de Gauss 2 0 1 0 3 ±v/3/3 3 i v 7 ^ 4 0, ± \ / l / 3 5 0, ± ^ 3 / 5 5 J 3 ± y/29/5 ± 2fî 7 ■ I 3 , 2 V E ±V 7±7 V 5 6 9 0 ±A / 5 ± 2V V /1 0 / 7 U , L 3 6 U' ± Sv^S 9 A / 5 ± 2V /1 0 / 7 0 ±V U , L 3
T A B . 2.1 Points superconvergents et points de Gauss sur le segment [—1,1].
La valeur du degré indique pour quels polynômes au plus ces points donnent des valeurs exactes selon leurs utilisations respectives. Par exemple, les points de Gauss servent à l'intégration numérique (Davis et Rabinowitz [4]). Nous remarquons que pour le degré 2, nous obtenons le point milieu du segment. Cette valeur concorde avec les calculs sur le simplexe.
Pour ce qui est des points de superconvergence en deux et trois dimensions, il est beaucoup plus difficile de les calculer. L'équation (2.12) donne une formule pour les trouver sur le simplexe. Par contre, ces points dépendent de u et ils ne sont donc pas uniques. De plus, il faut connaître le hessien de u pour utiliser (2.12). Comme notre objectif est de calculer les dérivées de u, nous ne connaissons donc pas le hessien de u à priori. Nous avons alors décidé de ne pas utiliser ces points de superconvergence après quelques tentatives infructueuses pour les calculer de façon itérative.
2.6 Fonctions utilisées dans les exemples
Nous utiliserons en grande majorité trois fonctions pour nos tests numériques. Il est certain que, dans le cadre de ce mémoire, nous avons fait beaucoup de tests avec plusieurs fonctions différentes. Par contre, pour ne pas passer trop de temps en analyse de convergence, nous nous limiterons qu'à trois fonctions qui sont toutefois intéressantes. La première fonction notée /i(x) := x2 — sinh(4x)/sinh(4) définie sur [0,1] est une fonction d'une variable que nous avons déjà rencontrée dans la section 2.1 (voir la figure 2.1). Nous privilégions cette fonction pour nos tests unidimensionnels, car elle a été utilisée par Zienkiewicz et Zhu [13] en 1992 lors de l'une de leurs premières publications sur la récupération des dérivées. Nous pourrons donc comparer facilement nos résultats.
La dérivée de /i est représentée sur la figure 2.2.
La seconde fonction notée /2(x, y) := e~100^x~1'2' +^-1/2) ] définie sur le carré [0, l]2 représente une gaussienne (voir la figure 2.9). Cette fonction a été utilisée par Vallet et al. [11] en 2007. Puisque cette fonction est une gaussienne, alors elle représente une forte variation dans la région intérieure au maillage. Cela permet de vérifier l'efficacité des méthodes de récupération avec une fonction régulière, mais qui n'est pas polynômiale.
ufle775? W T T s r 0» sm\ mn mn 5.0821
df2 FlG. 2.9 - Fonction f2 et sa dérivée partielle -^—.
ox
La dernière fonction notée /3(x,u) := e~25x + e~~2by définie sur [0, l]2 ressemble à une couche limite (voir la figure 2.10). Cette fonction a aussi été utilisée par Vallet et al. [11] en 2007. En général, les méthodes de récupération des dérivées sont moins performantes sur le bord des maillages. Cette fonction permet donc de trouver quelles méthodes sont les plus efficaces dans ces situations, car /3 varie presque seulement au bord.
2.777Bm—n ra n n r ■& 3H ro ro T472e-1
FlG. 2.10 - Fonction /3 et sa dérivée partielle
Les méthodes classiques de
récupération des dérivées
Ce n'est pas un exercice évident que de développer une méthode de récupération des dérivées sur un maillage quelconque. Dériver directement la solution numérique Uh sur chacun de ses éléments est loin d'être une méthode efficace, surtout si l'on veut que Vu/i soit du même ordre que u/j. Par contre, plusieurs chercheurs nous ont donné des méthodes hors du commun pour calculer efficacement et de façon surperconvergente les dérivées.
3.1 La m é t h o d e par patch de Zienkiewicz et Zhu
L'une des premières méthodes de récupération des dérivées a été développée par Zienkiewicz et Zhu [13]. Cette méthode que nous notons ZZ date de 1992 et elle utilise une approche inusitée pour calculer de façon superconvergente les dérivées. Même s'il s'avérera plus tard que cette méthode n'est pas aussi efficace que ce que prétendaient les auteurs, elle sera tout de même une référence importante pour les futurs développements dans ce domaine.L'idée principale de Zienkiewicz et Zhu fut de tenter une récupération en utilisant des «patchs» autour de chaque sommet du maillage. Nous désignons patch un ensemble d'éléments dont l'union est connexe (voir la figure 3.1). Nous disons qu'un patch est associé à un sommet du maillage et vice-versa si tous les éléments touchant à ce sommet sont dans le patch.
FlG. 3.1 - Patchs sur un maillage régulier.
Étant donné u une fonction sur tt Ç Rn, nous notons Uh la réinterpolation de u de type Pk sur tth- Nous voulons trouver Oh une approximation de Vu qui soit aussi de type Pk- Il est clair que nous ne pouvons pas utiliser Oh :— Vu/j construite dans la section 2.4, car cette approximation est de type Pfe_i par morceaux et d'ordre k. Ainsi, l'idée de la méthode ZZ est la suivante : nous voulons obtenir «autour» de chaque sommet du maillage une expression Oh qui sera localement notre dérivée récupérée o~h-Pour ce faire, sur chacun des plus petits patchs Fs associés à chacun des sommets s, nous minimisons l'expression,
min ^2 IIVitft(Xi) - dhixi
êhe P k :
\l
(3.1) où les points Xj sont des points d'évaluation (samplings points) (voir les figures 3.2 et 3.3).
D'une certaine façon, nous utilisons l'information de Vu/j pour construire 07,. Cela est logique, puisque Vu/j est une approximation de Vu. Il est proposé d'utiliser les points de Gauss s'ils existent comme points d'évaluation, car ils sont reconnus comme étant superconvergents. Cela n'est vrai que pour les cas k = 1 et k = 2 (voir tableau 2.1). Les auteurs proposent, au lieu de minimiser la grande expression (3.1), de minimiser plusieurs petites expressions corespondant à chaque dimension,
-mJS E l(V ui(zi))j - (ôh(xi))j\
* f ce /* j=i
Vi = 1, ,n. (3.2)
FlG. 3.2 - Points d'évaluation (triangles) sur un patch pour le Pi et le P2. i p i A A I O ( A A i 0 ' i 0 Q O i A A A A I • O • I A A A A > • O • ( A A A A • O • A A A A ' 0 0 O i
FlG. 3.3 - Points d'évaluation (triangles) sur un patch pour le Qi et le Q2. théorème de Schwarz impose que diâh)i/dy = diâh)2/dx si n = 2 et k > 2. Cependant, nous n'en tenons pas compte dans cette méthode. Si nous transformons (3.2) en une formule de moindres carrés, nous trouvons l'expression,
/
j = i
_T PUxAPkixAa^ = _T PtixJiVuhixiVj , Vj = 1,..., n. (3.3) i = l
Nous posons (â/,(x))j = Pfc(x)a^', où ay> est le vecteur des coefficients de iôhjj- Cela nous donne n systèmes (n£fc) x (n£ J à résoudre,
A a{ j ) = b{ j ).
Il est à noter que la matrice A est la même pour chaque composante j du gradient. Il est clair qu'il faut avoir au moins ("£*) points d'évaluation pour que la matrice
A1 A soit inversible. Cependant, il n'est pas toujours possible qu'en prenant le plus petit patch d'un sommet, nous puissions prendre assez de points d'évaluation. En effet, n'oublions pas que sur chaque patch, le polynôme est de degré A;. Donc, il est inutile de prendre plus qu'un certain nombre de points d'évaluation sur un même élément, car sinon, nous obtiendrons des systèmes dépendants. Lorsqu'il n'y a pas assez de points, les auteurs proposent d'élargir le patch d'une couche d'éléments (voir la figure 3.4). Cela se produit lorsque les points utilisés sont sur la frontière par exemple. Il est assez paradoxal de constater que c'est lorsque les patchs sont les plus gros et que les systèmes d'équations sont les plus grands que les erreurs sont les plus importantes. Nous verrons des exemples plus loin.
FlG. 3.4 - Patchs élargis de la figure 3.1.
Lorsque tous les coefficients de ay> ont été calculés sur les patchs associés à chaque sommet du maillage, il faut ensuite combiner le tout. Pour un patch donné, seules les valeurs de â/, aux points d'interpolation qui sont à l'intérieur du patch sont conservées. Les valeurs des dérivées sur le bord du patch ne sont pas considérées, car elles seront calculées par un autre patch associé à un sommet voisin. Les auteurs proposent de faire une moyenne pondérée si un point d'interpolation est situé dans l'intersection de deux patchs ou plus. Par exemple, pour la cas du patch P2 sur la figure 3.2, les points d'interpolation au milieu des arêtes se retrouvent entre deux patchs. La valeur de Ohiyî) sur un point d'interpolation v* situé au milieu d'un arête sera la moyenne des valeurs calculées par ôhiyi) des deux patchs aussociés aux deux sommets de l'arête. Ainsi, nous obtenons les dérivées récupérées Oh sur tout le domaine tth à partir des
être superconvergente en Px (voir la figure 3.5). Cependant, bien que les auteurs pré-tendent que leurs résultats sont aussi superconvergents en deux dimensions et plus, nos calculs démontrent que l'ordre de convergence en norme L2 n'est que de 3/2 pour certaines fonctions comme /3 sur les maillages réguliers (voir la figure 3.7). Ce résultat est un peu décevant, mais n'oublions pas que c'est cette méthode qui a ouvert la voie à d'autres façons de faire qui seront encore plus efficaces. ZZ est beaucoup moins précise aux bords. La figure 3.8 représente l'erreur de la composante en x de Oh pour /3 et nous remarquons que l'erreur est très grande sur l'un des bords. En fait, la plupart des méthodes par patchs sont moins précises aux bords. Heureusement, en plusieurs dimensions, nous obtenons parfois de la superconvergence. En effet, ZZ est d'ordre 2 avec la fonction f2 (voir la figure 3.6). Il est à noter que sur les graphiques de courbes de convergence, nous employons la notation Vhk :=
Pkitth)-h • 2.50e-01 - Courbe exacte
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
FlG. 3.5 - ZZ en Pi appliquée à f\ sur un maillage uniforme de 4 éléments et courbe d'erreurs en norme L2.
3.2 La méthode par patch de Zhang et Naga
Quoique très semblable à la méthode de Zienkiewicz et Zhu, la méthode de Zhang et Naga [12] parue en 2005 que nous notons ZN est de loin supérieure. Nous remarquons la grande efficacité de cette méthode surtout en dimension 2 ou plus. Contrairement à ZZ, les auteurs n'utilisent pas Vu/j. Ils préfèrent plutôt reconstruire Uh en une fonction de type Pfc+i. Ainsi, avec ce procédé, ils pourront calculer le gradient de cette reconstruction et le résultat obtenu sera de type Pk par morceaux.
Erreur relative sur (Tj; e v j en norme L2 ( | V u - O J | q o / l V u | g ^ ) . tih e V'k en fonction de la taille des éléments (nf pour
Méthodes : ZZ (m2.00)
-FlG. 3.6 - ZZ en Pi appliquée à f2 (dérivée partielle en x) sur un maillage régulier de 8192 éléments et courbe d'erreurs en norme L2.
Erreur relative sur <y£ e V£ en norme L (|vFu-CT^CUv//]Vu|0',ri )> uft € ^A en fonction de la taille des éléments (hf pour
exp( 25x) I exp(-25y)
Méthodes : ZZ (m 1.46)
-FlG. 3.7 - ZZ en Pi appliquée à /3 (dérivée partielle en x) sur un maillage régulier de 8192 éléments et courbe d'erreurs en norme L2.
■3fm ÏÏÏ38 S5B& H — 2à8J? ÎSMB
dfz
FlG. 3.8 Différence ol — — obtenue avec ZZ. dx
reconstruire S7uh en type P* de ZZ. Nous notons cette reconstruction Pu/, et nous le faisons pour chaque sommet du maillage, et ce, sur leur patch respectif. Nous trouverons ainsi sur chaque patch une expression du type,
Fuh = Pit+ia, (3.4)
où a est le vecteur des coefficients de Pu/,.
Il n'est en aucun cas question de réinterpolation ici, car nous cherchons à transformer une fonction de degré k en une fonction de degré plus élevé k + 1. Dans [12], il est aussi proposé de multiplier les paramètres de a par hm. Ici, h est la longueur de la plus grande arête du patch et m est la multiplicité du monôme associé au coefficient de a. Il faut donc, par la même occasion, diviser les paramètres de Pfc+i par les mêmes valeurs respectivement. Cela améliore nettement le conditionnement de la matrice du système que nous aurons. Il est fondamental pour obtenir une bonne précision de faire cette manipulation. Ainsi, les auteurs proposent, comme pour ZZ, de minimiser sur chaque patch,
p uv a m+^ \ uhiy i) F uh(y i) \2. (3.5)
la méthode des moindres carrés, l'équation (3.5) devient,
Z K + M P m + M a = EPk+MMVi)- (3.6)
Ce qui nous donne un seul système ("fc+l1) x ("fc+î1) ^ résoudre, Aa = b.
Bien entendu, nous calculons ce système sur chaque patch. Si des patchs se révèlent insuffisants, nous procédons d'une façon légèrement différente de celle de ZZ. En se fixant un sommet central au patch, nous prenons les points du maillage qui sont dans un rayon r du sommet fixé. Donc, lorsque nous agrandissons le patch, il suffit d'augmenter r jusqu'à capter au moins un autre sommet. Cette façon de faire ne change pas grand chose dans les résultats numériques par rapport à l'agrandissement de patchs utilisé par ZZ.
Pour récupérer les dérivées par la suite, il suffit de calculer le gradient aux points d'interpolation des éléments,
VPU„(Î/0- (3.7)
Pour reconstruire finalement les dérivées et s'assurer qu'ils seront de type Pk, nous calculons les valeurs selon trois cas différents.
Cas 1 : Si le point d'interpolation v* est un sommet du maillage, nous prenons la valeur donnée par le patch P associé à ce sommet,
ohiyi) = VFuhiyi). (3.8)
Cas 2 : Si le point d'interpolation yt est sur une arête du maillage, nous prenons la moyenne pondérée des valeurs données par les patchs P1 et P2 qui sont associés aux deux sommets de cette arête,
OhiVi) = aVF'uhiyi) + (1 - a)VP2u/l(?/i). (3-9) Le terme a est un paramètre pour pondérer la moyenne en fonction de la distance de
î/i aux deux sommets.
Cas 3 : Si le point d'interpolation u, est à l'intérieur d'un élément du maillage, nous prenons encore la moyenne pondérée des valeurs données par les patchs F3 qui sont associés aux sommets de cet élément,
N j N j
MVi) = E d^Uhiyi), £ > ; = 1. (3.10) 3 = 1 j = l
Encore une fois, les a, sont des paramètres pour pondérer la moyenne en fonction de la distance de yi aux sommets.
Exemple :
Soit Uh une fonction Pi définie sur le maillage régulier de la figure 2.3. Nous allons construire Pu/, qui est de type P2 sur le patch centré à l'origine. Les sept points d'in-terpolation sont donc {(0,0), (/i, 0), (/i, h), (0, h), (—h, 0), (—h, —h), (0, — h)}. Ainsi, nous cherchons les composantes de a qui respectent 3.5. Pu/, est de la forme suivante :
Fuh = P2a = il, x,y,x2,xy,y2)iai,a2,a3,0,4,0,5, a6y
= (1, x/h, y/h, x2/h2, xy/h2, y2/h2)iax, a2h, a3/i, a4/i2, a5h2, a6/i2)f = P2(âi,â2,â3,â4,â5,â6)'
= P2â.
La matrice du système 3.6 avec la «normalisation» en h s'écrit alors :
7 0 0 0 4 2 0 2 4 4 0 0 2 0 0 4 0 0
Pour trouver les coefficients â, il ne reste qu'à résoudre le système linéaire,
7
Ââ = Y,Pt2iyi)u
hivi)-i = l
Finalement, nous avons construit un polynôme de degré 2 sur le patch qui est une approximation de u/,,
Fuh = P2ô.
Il suffit de dériver ce polynôme pour trouver une estimation des dérivées premières en Pi sur le patch. Il faut suivre les trois cas énoncés plus haut pour récupérer crh sur le maillage au complet. oh := VFuh. i = ^P2%,)A(2/i) i = i 4 2 4 " 0 0 0 0 0 0 4 2 2 2 2 2 2 2 4
Nous remarquons que si n > 2, le nombre d'opérations à effectuer pour calculer ZN est moindre que celui de la méthode ZZ. Ceci est un autre avantage de ZN. Dans les exemples suivants (voir les figures 3.9, 3.10 et 3.11), nous remarquons que ZN est superconvergente. Nous remarquons aussi qu'il y a très peu de différences entre ZZ et ZN pour la récupération Pi en une dimension. C'est pour cela que nous avons les mêmes
df3
courbes de convergence. La figure 3.12 représente l'erreur ol —TT— obtenue. Comme avec la méthode ZZ, c'est aux bords que l'erreur est la plus grande.
0 0 1 0.2 0.3 0.4 0.5 0 6 0.7 0.8 0.9 1
FlG. 3.9 - ZN en Pi appliquée à /i sur un maillage uniforme de 4 éléments et courbe d'erreurs en norme L2.
Erreur relative sur (TjJ e Vjj en norme L (|^u-ff£lon /1^ufo iï )• uh e *h en fonction de la taille des éléments (nf pour
u = exp( - 1 0 0 ( ( x - l / 2 ) ' X ( y - l / 2 )2) )
FlG. 3.10 - ZN en Pi appliquée à f2 (dérivée partielle en x) sur un maillage régulier de 8192 éléments et courbe d'erreurs en norme L2.
Erreur relative sur Of, e \rh en norme Û (|Vu <7|î1rtû./l^ulo.a )> UA e ^ i en fonction de la taille des éléments (Kf pour
u = exp( 2 5 x ) exp( 25y)
*asr
FlG. 3.11 ZN en Pi appliquée à /3 (dérivée partielle en x) sur un maillage régulier de 8192 éléments et courbe d'erreurs en norme L2.
■055555 333933 bStm A.W7I3 1.5904 J5337
dh
FlG. 3.12 Différence ol — — obtenue avec ZN. dx
3.3 La méthode par patch de Belhamadia, Fortin et
Chamberland
La méthode élaborée dans [1] par Belhamadia, Fortin et Chamberland que nous notons BFC est, tout comme ZN, une amélioration de la méthode ZZ. Nous utiliserons cette méthode pour fin de comparaison. BFC a été élaborée en 2003 avant ZN et se révèle superconvergente sur les maillages à plusieurs dimensions contrairement à ZZ. Sans entrer trop dans les détails, nous allons en tirer les grandes lignes. Il est à noter que ZN et BFC ont quelques ressemblances dans leur algorithme, mais les résultats obtenus diffèrent quelque peu. La plus grande différence se fait surtout sentir sur la frontière du domaine.
Les auteurs proposent, pour récupérer les dérivées, de trouver sur chacun des patchs une fonction uapp qui sera un polynôme de degré k + 1 si u^ est de type Pfc. En fait, nous ne calculons pas complètement ce polynôme. Nous trouvons seulement les k + 1 premières dérivées de uapp au sommet associé au patch. Par la suite, pour la construction de oh, nous utilisons une moyenne pondérée des valeurs trouvées comme dans ZZ.
La première étape consiste à écrire uapp en développement de Taylor de degré k + 1 autour de xp qui est le sommet associé au patch. Ce n'est pas un développement de Taylor à proprement parler, car uappixp) est inconnue et ne nous intéresse pas. Par contre, nous estimons cette valeur par Uhixp). Par exemple, si Uh est de type P\,
uappix) « uhixp)+ < Vua p PixP),x - xP > + - < Ha p PixP)ix - xP), x - xP > .
Ici, Happ est la matrice hessienne de uapp. Pour pouvoir trouver les inconnues qui sont Vuapp(xp) et Pa p p(xp), il faut minimiser la norme du vecteur d'erreur suivant,
ua p pi x i ) - UhiXi)
uappix2) - Uhix2) uappixn) - Uhixn)
Il est à noter que les sommets Xi,...,xr a sont les sommets constituant le patch excluant le point xp lui-même. Omettre Xp permet une meilleure souplesse pour la résolution du système et de meilleurs résultats. Comme nous ne possédons pas les valeurs uapp(xj), il est alors proposé de minimiser la fonction suivante,
où, si nous sommes en deux dimensions (x,u), a = v T i xP, y p ) v-Tixp.Vp) ua™ixp,yP) *2?(XP,VP)
[
U^>ixp,y
P)
b = Uhixi,yi) - uhi x p , yP) Uhix2,yi) -UhixP,yp)Uhixn,yn) - U h i xP, yP)
A =
( x i - xF) ( u i - u p ) | ( x i - x p )2 (xi - xp)(yi - up) \(yx - yPf ( x2- xP) i y2- yP) \ i x2- xP)2 (x2 - xP)(y2 - yP) \ i y2~ yPf
_ ( x „ - x p ) i yn- yP) \ i xn- xP)2 (xn - xP)iyn - yP) \ i yn- y p f
Nous remarquons que Fia) est bel et bien la norme au carré du vecteur d'erreur. Dans le sens des moindres carrés, il suffit de résoudre le système,
AlAa = A%.
Bien sûr, si le système est singulier, il faut élargir le patch comme pour ZZ. Un des avantages de la méthode BFC est que nous calculons les dérivées secondes en plus des dérivées premières pour le cas Pi. La matrice des dérivées secondes notées H h sera moins précise que les dérivées premières. Cependant, nous pouvons constater qu'elle a un comportement «superconvergent», c'est-à-dire que l'ordre de convergence terme à terme de Hh sera linéaire si Uh est de type Pi. Cela est un gain significatif, car les dérivées secondes de Uh sont nulles sur tt et donc ne convergent pas vers la vraie solution. Nous avons donc le comportement,
||V«-a
h||
0,
n< Citt)h
2,
d2u
dxidxj - (Hh)ij
< Citt)h.
o,n
Nous avons la généralisation de cette propriété si nous prenons une fonction de type Pk. Bien sûr, le développement de Taylor requis sera plus grand si k est grand et donc, le système à résoudre sera plus important. Comme avec ZN, les résultats numériques sont intéressants, car BFC est superconvergente (voir les figures 3.13 et 3.14). De plus, l'erreur obtenue avec /3 est de la même forme que celle avec ZZ et ZN (voir la figure 3.15). L'erreur est très importante aux bords.
Erreur relative sur Of, e Vj en norme î } (|Vu Oft]no./lVu|ofû ) , U | E VJ[ en fonction de la taille des éléments ( n j pour
Méthodes : BFC (m 2.00)
* B R
FlG. 3.13 BFC en Pi appliquée à /2 (dérivée partielle en x) sur un maillage régulier de 8192 éléments et courbe d'erreurs en norme L2.
Erreur relative sur ofc e V£ en norme L ( | V U < 7 £ | Q O / 1 V U | Q O ), uh e Vh en fonction de la taille des éléments (Kfpoui
u — exp( 2 5 x ) exp( 25y)
Méthodes : BFC (m 1.96)
■743SS
FlG. 3.14 BFC en Pi appliquée à /3 (dérivée partielle en x) sur un maillage régulier de 8192 éléments et courbe d'erreurs en norme L2.
![FIG. 2.6 - Maillage adapté à partir de la fonction fix,y) = e -"»[(*-i/2) 2 +(i/-i/2)2]](https://thumb-eu.123doks.com/thumbv2/123doknet/5567889.133464/22.898.363.593.275.513/fig-maillage-adapté-partir-fonction-fix.webp)