CAPTEURS DE DEPLACEMENT A FIBRE
OPTIQUE À MODULATION D'INTENSITÉ BASÉE
SUR LA PRÉSENCE DE DÉSALIGNEMENTS
ENTRE FIBRES MONOMODES
Mémoire présenté
à la Faculté des études supérieures de l'Université Laval
dans le cadre du programme de maîtrise en génie mécanique
pour l'obtention du grade de Maître es sciences (M.Se.)
DEPARTEMENT DE GENIE MECANIQUE
FACULTÉ DE SCIENCES ET DE GÉNIE
UNIVERSITÉ LAVAL
QUÉBEC
JUIN 2007
Ces présents travaux de recherche portent sur le développement de nouveaux capteurs de déplacements à fibre optique monomode à modulation d'intensité causée par la présence de désalignements entre les fibres. À partir d'un fondement théorique rigoureux, des nouveaux principes de fonctionnement de capteurs sont développés. Des modèles analytiques d'efficacité de couplage optique entre faisceaux gaussiens .sont utilisés. Un modèle ba.sé sur une expression plus juste du mode de propagation fondamental de la fibre monomode et sur le phénomène de propagation d'un champ optique dans l'air libre est aussi développé à l'aide de la méthode de l'intégrale de recouvrement. Les performances expérimentales de deux capteurs sont évaluées et des directives de conception sont proposées. Ces capteurs sont caractérisés par un comportement linéaire, des possibilités de mesure multidimensionnelle, des performances adaptables à différentes applications et l'évitement des désavantages classiques des capteurs à modulation d'intensité. Une étude principalement théorique de quelques autres solutions est également réalisée.
The present research work relates to the development of novel fiber optic displacement sensors based on intensity modulation caused by the presence of misalignments between single-mode fibers. Starting from a rigorous theoretical base, working principles of new sensors are developed. Analytical models for the optical coupling efficiency of gaussian beams are used. A model based on a better expression of the fundamental propagation mode of single-mode fibers and on the optical field propagation phenomenon is developed using the overlap integral method. The experimental performances of two sensors are evaluated and design guidelines are proposed. These sensors are characterized by a linear behavior, possibilities of multidimensional measurement, adaptable performances to various applications and the avoidance of the classical drawbacks of intensity modulation based fiber optic sensors. A mainly theoretical study of other sensors is also achieved.
Ce projet de maîtrise fut pour moi une expérience extrêmement formatrice au cours de laquelle je crois avoir beaucoup progressé. Cette expérience n'aurait pas pu être possible sans la contribution de personnes et organismes que je tiens à remercier.
Merci tout d'abord à mon directeur de recherche, Yves St-Amant, qui a cru en moi en me confiant ce projet et qui fut, tout au long de ce dernier, absolument irréprochable. J'ai appris énormément de lui et ce, sur de nombreux plans. Je me sens privilégié d'avoir travaillé avec quelqu'un d'aussi dynamique et généreux de son temps et d'une si grande rigueur. N'oublie pas de prendre des vacances de temps en temps Yves!
Merci également à Frédéric D'Amours pour son aide dans la réalisation des tests en laboratoire et dans le développement de l'interface utilisée avec le montage expérimental.
Merci à Nathalie McCarthy et Michel Piché du département de physique qui se sont montrés di.sponibles et ont su répondre aux questions d'un gars de génie mécanique qui venait faire un cours d'optique gradué sans les cours préalables.
Merci au CRSNG qui ont soutenu financièrement le projet.
Merci finalement à mes amis et mes proches pour la constance de leur support et de leurs encouragements sans lesquels je n'aurais peut être pas tenu le coup. Merci particulièrement à ma famille de m'avoir supporté, à mon père pour son expertise en français et à ma copine Marie-Michelle de m'avoir enduré même quand je travaillais beaucoup et que j'avais moins de temps à lui accorder.
Vincent
RESUME
ABSTRACT i AVANT-PROPOS ii TABLE DES MATIÈRES iv LISTE DES FIGURES vii TERMINOLOGIE xi
CHAPITRE L INTRODUCTION
.1 Revue de documentation scientifique 1
.1.1 Quantités mesurables 1 1.2 Propriétés et applications de la fibre optique 2
1.3 Capteurs intrinsèques ou extrinsèques 2 1.4 Classification des capteurs à fibre optique 3
1.5 Capteurs à modulation de la phase 3 1.6 Capteurs à modulation de l'état de polarisation 6
1.7 Capteurs à modulation de la longueur d'onde 6
1.8 Capteurs à modulation d'intensité 8 1.9 Capteurs à modulation d'intensité intrinsèques 9
1.10 Capteurs à modulation d'intensité extrinsèques 10 1.11 Capteurs à modulation d'intensité basés sur la réflexion 10
1.12 Capteurs à modulation d'intensité causée pivr la présence d'un obturateur 11 1.13 Capteurs à modulation d'intensité causée par la présence de désalignements
entre les fibres 11 1.2 Problématique de recherche 13
1.3 Objectifs de recherche 13 1.4 Présentation du mémoire 14
2.2 Théorie 17 2.2.1 Structure du capteur proposé 18
2.2.2 Champ optique émis par une fibre optique monomode 18
2.2.3 Propagation du champ optique dans l'air libre 20
2.2.4 Efficacité de couplage optique 21 2.2.5 Calcul numérique de l'efficacité de couplage optique 23
2.2.6 Simulation numérique du comportement du capteur 24
2.3 Performances expérimentales 29 2.3.1 Montage expérimental 30 2.3.2 Performances du capteur 32
2.4 Discussion 43 2.5 Conclusion 43
CHAPITRE 3. CAPTEUR LINÉAIRE DIFFÉRENTIEL À UNE OU DEUX
DIMENSIONS 45
3.1 Introduction 45 3.2 Théorie 47
3.2.1 Structure du capteur à une dimension proposé 47
3.2.2 Faisceau gaussien 48 3.2.3 Modèle analytique d'efficacité de couplage en deux dimensions 50
3.2.4 Comportement théorique du capteur à une dimension 52 3.2.5 Structure du capteur à deux dimensions proposé 54 3.2.6 Modèle analytique d'efficacité de couplage en trois dimensions 56
3.2.7 Comportement théorique du capteur à deux dimension 57 3.3 Performances expérimentales du capteur à une dimension 59 3.4 Validation expérimentale du comportement à deux dimensions 72
3.5 Discussion 76 3.6 Conclusion 77
CHAPITRE 4. AUTRES CONCEPTS DE CAPTEURS 79
4.1 Introduction 79 4.2 Capteur différentiel de déplacement axial 79
4.2.3 Extension à un capteur à trois dimensions 84
4.3 Capteur différentiel angulaire 87 4.3.1 Structure du capteur proposé 87 4.3.2 Comportement théorique du capteur angulaire 89
4.3.3 Extension à un capteur angulaire à 2 dimensions 94 4.4 Capteur non linéaire utilisant des réseaux neuroniques 96
4.4.1 Réseaux neuroniques 97 4.4.2 Capteur proposé 99 4.4.3 Réseau neuronique proposé 101
4.4.4 Tests préliminaires du réseau 102
4.5 Conclusion 102
CHAPITRE 5. CONCLUSION 105
RÉFÉRENCES BIBLIOGRAPHIQUES 109 ANNEXE A : SPÉCIFICATIONS TECHNIQUES 115
ANNEXE B : COURBES EXPÉRIMENTALES 130 ANNEXE C : NOTIONS MATHÉMATIQUES 163
Figure 1.1 Interféromètre de Fabry-Perot 4 Figure 1.2 Interféromètres de Mach-Zehnder; deMichelson; de Sagnac 5
Figure 1.3 Réflexion et transmission d'un faisceau passant par un réseau de Bragg sur
fibre 7 Figure 1.4 Classification des capteurs à fibre optique à modulation d'intensité 9
Figure 1.5 Sonde d'un capteur à modulation d'intensité basée sur la réflexion 10 Figure 1.6 Capteurs à fibre optique à modulation d'intensité causée par la présence de
désalignements : latéral, axial, angulaire, latéral (capteur différentiel) 12 Figure 1.7 Fibre optique en porte-à-faux utilisée comme élément sensible d'un
accéléromètre 12 Figure 2.1 Distribution latérale d'efficacité de couplage théorique basée sur des faisceaux
gaussiens et distribution expérimentale 17 Figure 2.2 Structure de base et principe de fonctionnement du capteur proposé 18
Figure 2.3 Comparaison entre le champ optique propagé dans la fibre et un faisceau
gaussien sur une échelle linéaire et en décibels 19 Figure 2.4 Faisceau optique divergeant à mesure qu'il se propage dans l'air libre 20
Figure 2.5 Couplage optique entre une fibre émettrice et une fibre réceptrice 22 Figure 2.6 Efficacité de couplage optique théorique en fonction de x pour un espacement
nul entre deux fibres SMF-28® de Corning® 25 Figure 2.7 Évolution de l'efficacité de couplage optique théorique en fonction de x après
propagation 26 Figure 2.8 Sensibilité théorique du capteur en fonction de l'espacement entre les fibres
pour une zone considérée linéaire entre -50 et -70 dB 27 Figure 2.9 Course théorique du capteur en fonction de l'espacement entre les fibres pour
une zone considérée linéaire entre -50 et -70 dB 28 Figure 2. i 0 Erreur de non linéarité théorique du capteur en fonction de l'espacement entre
les fibres pour une zone considérée linéaire entre -50 et -10 dB 29
Figure 2.12 Robot de nanopositionnement, fibres optiques et caméras 31 Figure 2.13 Balayages effectués pour caractériser le comportement de l'efficacité de
couplage transversale en fonction de l'espacement (z) entre les fibres émettrice
et réceptrices 33 Figure 2.14 Distribution expérimentale transversale de puissance transmise pour des fibres
espacées de \0 jum 34 Figure 2.15 Distribution expérimentale transversale de puissance transmise pour des fibres
espacées de 150 jUm 34 Figure 2.16 Distribution expérimentale transversale de puissance transmise pour des fibres
espacées de 10 mm 35 Figure 2.17 Exemples de zones linéaires possibles dans la distribution expérimentale de
pu issance transmise à <;= 10 jU)n 36 Figure 2.18 Sensibilité en fonction de l'espacement entre les fibres pour différentes erreurs
de non linéarité 38 Figure 2.19 Comparaison des sensibilités théorique et expérimentale (avec 1 % d'erreur de
non linéarité) du capteur proposé 39 Figure 2.20 Course maximaie du capteur en fonction de l'espacement entre les fibres et
directives de conception pour différentes erreurs de non linéarité 40 Figure 2.21 Résolution possible du capteur en fonction de l'espacement axial entre les
fibres considérant un photodétecteur de 0,001 dB de résolution 41 Figure 2.22 Graphe de conception du capteur linéaire à une dimension 43 Figure 3.1 Distribution d'efficacité de couplage théorique, distribution théorique basée sur
des faisceaux gaussiens et distribution expérimentale 46 Figure 3.2 Structure du capteur différentiel à une dimension 47 Figure 3.3 Comportement linéaire comme principe de fonctionnement du capteur 48
Figure 3.4 Front d'onde d'un faisceau gaussien et divergence du faisceau après
propagation 49 Figure 3.5 Désalignements latéral (x), axial (z) et angulaire (^v) considérés dans le modèle
de Nemoto 51 Figure 3.6 Sensibilité adimensionnelle du capteur (échelle logarithmique) en fonction de
l'espacement axial adimensionnel entre les fibres 53
Figure 3.9 Configuration des fibres réceptrices du capteur différentiel à deux
dimensions 55 Figure 3.10 Désalignements latéraux {x et y), axial (z) et angulaires (0., et 6^) situés dans un
espace tridimensionnel considérés dans le modèle de Wang-Nemoto 56 Figure 3.11 Puissance transmise et différence de puissance transmise entre deux fibres en
fonction de x à z= 10 jiim 60 Figure 3.12 Puissance transmise et différence de puissance transmi.se entre deux fibres en
fonction de x à ; = 150//m 61 Figure 3.13 Puissance transmise et différence de puissance transmise entre deux fibres en
fonction de x à z = 10 mm 62 Figure 3.14 Exemples de zones linéaires possibles dans la distribution expérimentale de
différence de puissance transmise à z = 10 m?n 64 Figure 3.15 Sensibilité du capteur différentiel en fonction de l'espacement z entre les fibres
pour différentes erreurs de non linéarité 66 Figure 3.16 Comparaison des sensibilités théorique et expérimentale (pour une erreur de
non linéarité de 1 %) du capteur proposé 67 Figure 3.17 Comparaison des résultats théoriques et expérimentaux de la variation de la
pente de la dérivée de la distribution de puissance optique en fonction de z... 68 Figure 3.18 Cour.se maximale expérimentale du capteur en fonction de l'espacement
entre les fibres et approximation quadratique pour différentes erreurs de
non Iinéarité 69 Figure 3.19 Ré.solution possible du capteur en fonction de l'espacement entre les fibres
considérant un photodétecteur de 0,001 cIB de résolution 70
Figure 3.20 Graphe de conception du capteur différentiel 72 Figure 3.21 Comportement linéaire théorique des différences de puissance tran.smise .selon
X en présence de dé.salignements y 73 Figure 3.22 Balayages effectués pour valider le comportement du capteur à deux
dimensions 73 Figure 3.23 Distributions de puissance optique transmise des 13 balayages considérés... 74
Figure 3.24 Distributions de différence de puissance transmise calculées à partir des 13
balayages considérés 75 IX
Figure 4.2 Vue isométrique du capteur à trois dimensions 85 Figure 4.3 Vues en plan et en élévation du capteur à trois dimensions 85
Figure 4.4 Configuration des fibres réceptrices du capteur à trois dimensions 86
Figure 4.5 Structure du capteur différentiel angulaire 88 Figure 4.6 Comportement à la base du capteur différentiel angulaire 89
Figure 4.7 Équivalence des désalignements référencés à l'une ou l'autre des fibres pour le
calcul d'efficacité de couplage 89 Figure 4.8 Sensibilité adimensionnelle du capteur en fonction de l'espacement axial
adimensionnel entre les fibres 91 Figure 4.9 Configuration du capteur angulaire avec un angle minimum entre les fibres
réceptrices 92 Figure 4.10 Angle minimum entre les fibres réceptrices en fonction de r pour un diamètre
de gaine de 125 /Mn 94 Figure 4.11 Vues en élévation et en plan du capteur angulaire à deux dimensions 95
Figure 4.12 Analogie entre un neurone artificiel et un neurone biologique 98 Figure 4.13 Réseau neuronique à trois couches avec cinq neurones dans la couche d'entrée,
huit dans la couche cachée et quatre dans la couche de sortie 98 Figure 4.14 Configuration des fibres réceptrices du capteur proposé 100 Figure 4.15 Principe de fonctionnement d'un capteur composé de ir+\ fibres
Puisque les présents travaux impliquent la recherche de nouveaux appareils de mesure et l'évaluation de leurs performances, il importe de définir quelques termes de métrologie qui seront employés ultérieurement.
Mesurage
Le mesurage comprend l'ensemble d'opérations ayant pour but de déterminer une valeur d'une grandeur [ISO (1993), p. 19]. Il s'agit de l'action de mesurer.
Mesurande
Un mesurande est une grandeur particulière soumise à mesurage [ISO (1993), p. 20]. Il s'agit de la quantité physique que l'on désire mesurer et qui module le phénomène qui permet de le faire. Pour les capteurs développés dans ce projet, le mesurande est le déplacement.
Capteur
Formellement, un capteur est l'élément d'un appareil de mesure ou d'une chaîne de mesure qui est directement soumis à l'action d'un mesurande [ISO (1993), p. 33]. Un transducteur est un synonyme de capteur.
C o u r s e
La course d'un capteur est sa plage de fonctionnement, c'est-à-dire la distance sur laquelle le capteur permet la prise de mesure. Mathématiquement, la course est le module de la différence entre les 2 limites d'une étendue [ISO (1993), p. 37].
Linéarité
Une zone linéaire est une plage dans laquelle la longueur et la valeur de chaque division sont reliées par un coefficient de proportionnalité constant le long de l'échelle [ISO (1993), p. 35]. L'erreur de non linéarité est typiquement utilisée pour quantifier un comportement linéaire [Coope (2006)]. Elle est définie comme le quotient en pourcentage de l'erreur absolue maximale (le point qui dévie le plus de la droite de régression) par la course totale du capteur.
La sensibilité d'un capteur est calculée par le quotient de l'accroissement de la réponse d'un instrument de mesure par l'accroissement correspondant du signal d'entrée [ISO (1993), p. 39]. Pour un capteur linéaire, la sensibilité correspond à la pente de la droite de régression.
Erreur absolue de mesure
L'erreur absolue de mesure peut être définie comme étant le résultat d'un mesurage moins une vraie valeur du mesurande [ISO (1993), p. 26]. Certes la vraie valeur du mesurande est toujours inconnue, mais elle peut être posée comme correspondant à une mesure prise par un capteur très précis. Pour le cas des capteurs développés dans les présents travaux, la mesure utilisée comme référence est celle des encodeurs du robot de nanoposifionnement utilisé pour les essais expérimentaux (voir section 2.3.1 ).
Résolution
La résolution est définie comme étant la plus petite différence entre les indications d'un capteur pouvant être distinguée de manière significative [Culshaw (2004)]. La résolution est définie par le système de mesure en entier (photodétecteur, chaîne d'acquisition de données, etc.), pas seulement par le capteur.
INTRODUCTION
1.1 Revue de documentation scientifique
Depuis l'arrivée du laser dans les années 1960, la fibre optique suscite un grand intérêt dans le domaine des télécommunications pour ses propriétés uniques et sa capacité à transmettre de grandes quantités d'informations sur de très longues distances. En effet, elle peut transmettre environ 100 000 fois plus d'information que les micro-ondes, avec une perte de signal dans la fibre qui est allée en diminuant avec les années (de 99%/hn dans les années 1970 à 4%/km environ 20 ans plus tard pour la fibre de Corning) [Hecht (2002)]. Cet intérêt est devenu considérable avec les nouvelles possibilités que condnue d'offrir la fibre optique à mesure que la recherche progresse. En effet, dans les années 1970, de nombreux chercheurs lui ont porté une attention particulière dans leur recherche et développement d'une nouvelle technologie de capteurs. Ce sont les années 1980 et 1990 qui ont vu l'émergence des capteurs à fibre optique sur le marché et depuis, leur accessibilité est grandissante [Udd (1993)]. Actuellement, le monde des capteurs à fibre optique est en pleine effervescence et leur usage est de plus en plus répandu, quoiqu'on commence à peine à normaliser leur développement et leur usage [Habel (2006)].
1.1.1 Quantités mesurables
La diversité des quantités physiques mesurables avec les capteurs à fibre optique n'a d'égal que l'imagination de leurs concepteurs. En effet, la fibre optique constitue un élément sensible particulièrement versatile, permettant autant la mesure de déplacements, déformations, accélérations, pressions, températures, débits, voltages, champs magnétiques, indices de réfraction, etc. que la détection de produits chimiques, du niveau d'un liquide ou même d'anomalies biologiques, tout dépendant du principe de fonctionnement du capteur.
fibre optique qui en font souvent la seule option envisageable pour certaines applications. Premièrement, l'une des vertus les plus connues de la fibre optique est certainement son immunité à l'interférence électromagnétique et à l'interférence radio. Comme les environnements électromagnétiques perturbent les mesures de bien des capteurs conventionnels (capacitifs, piézoélectriques, jauges de déformation, potentiomètres, LVDT, etc.), on retrouve des capteurs à fibre optique dans des générateurs électriques [Brenci et al. (1991)] ou sur des grosses machines tournantes [Lopez-Higuera et al. (1997)] comme des foreuses ou des alternateurs de haute puissance. Dans un même ordre d'idées, comme la fibre est parcourue par de la lumière et que les photons ne portent pas de charge électrique [Hecht (2002)], elle n'est pas affectée par les courts-circuits et l'électricité statique et peut être utili-sée sans risque dans des milieux fortement inflammables, comme des puits de pétrole [Zeng et al. (2004)] ou des usines pétrochimiques. Également, sa grande résistance à la corrosion et la possibilité d'utiliser diverses enveloppes protégeant la fibre rendent les capteurs à fibre optique fonctionnels même dans des environnements sévères [Xiao et al. (2005)] contenant de hautes concentrations d'éléments corrosifs ou soumis à des températures élevées. En effet, la température de fusion du verre étant d'environ 1500 "C, Brandt et al. (1982) ont pris des mesures à des températures allant jusqu'à 700 "C sans problème. De plus, la fibre optique est très compacte, son diamètre pouvant être de l'ordre de celui d'un cheveu humain. Cela implique conséquemment peu ou pas d'interférence mécanique avec les systèmes dans lesquels elle est implantée ainsi que des possibilités intéressantes dans les domaines des systèmes microélectromécaniques [Wang et al. (2005)] et de la médecine moderne [Motz et al. (2004)], la fibre optique étant également biocompatible. Un autre atout spécifique aux capteurs à fibre optique est de permettre le multiplexage, c'est-à-dire, la prise de plusieurs mesures simultanées avec la même fibre [Bao (2001)]. Finalement, la fibre optique est de plus en plus abordable, étant passée de 5-10 $US/m à environ 0,10 $US/m entre
1980 et 1990 [Udd (1991)]. La fibre optique a plusieurs autres propriétés intéressantes, mais nous nous limiterons ici à ces dernières.
1.1.3 Capteurs intrinsèques ou extrinsèques
Dans la caractérisation des capteurs à fibre optique, plusieurs distinctions peuvent être faites. Premièrement, Culshaw et al. (1988) énoncent qu'un capteur à tlbre optique est intrinsèque s'il utilise la fibre elle-même comme élément sensible et extrinsèque si un
extrinsèque, la lumière est émise hors de la fibre avant d'être modulée séparément pour finalement être transmise à nouveau dans une fibre (la même ou une autre).
1.1.4 Classification des capteurs à fibre optique
Hecht (1999) résume la raison d'être des capteurs comme étant la modulation d'une grandeur physique dont la quantité est facilement observable pour permettre de tirer des conclusions sur une autre grandeur physique plus difficile à mesurer. Par exemple, pour le cas d'un accéléromètre à piézoélectrique, on module la charge émise par la céramique piézoélectrique qui se déforme, une quantité directement mesurable, pour tirer des conclusions sur l'accélération, une quantité impossible à mesurer sans intermédiaire. Dans cet ordre d'idées, les capteurs à fibre optique sont classifies par la base de leur principe de fonctionnement : la quantité optique modulée. Cette méthode de classification est reprise par la commission électrotechnique internationale (CEI) [ANSI (1998)]. Les principaux types de capteurs à fibre optique sont donc :
• à modulation de la phase ;
• à modulation de l'état de polarisation ; • à modulation de la longueur d'onde ; • à modulation d'intensité.
1.1.5 C a p t e u r s à modulation de la phase
Les capteurs à modulation de la phase font appel à la nature ondulatoire de la lumière qui implique la notion d'interférence. En effet, le point commun à ces types de capteurs est le fait que leur élément sensible soit inclus dans un interféromètre. À la base, un interféromètre est composé de deux ondes lumineuses cohérentes, c'est-à-dire de même fréquence et longueur d'onde avec un déphasage constant [Auger (1998)] dont l'une est le faisceau référence et l'autre le faisceau sensible. Après superposition, les faisceaux interfèrent en fonction de leur phase relative. Cette phase est modulée par la différence entre les distances parcourues par les faisceaux (appelées chemins optiques) causée par le mesurande'. Pour
' Le mesurande est une grandeur particulière soumise à mesurage, selon le groupe de métrologie de l'organisation internationale de normalisation [ISO (1993)].
Cavité de
Fabry-Perot
%V.
%-<^ ^ ^Miroir
semi-transparent
<r
^¥,
Surface
réfléchissante
Figure 1.1 Interferometre de Fabry-Perot.Le faisceau y/o est séparé en un faisceau référence i//i et un faisceau sensible (^2 et leur phase relative mesurée par interférométrie est modulée par la longueur de l'espace entre les deux miroirs (appelée cavité de Fabry-Perot). Ce type d'interféromètre est entre autres à la base de capteurs de pression [Totsu el al. (2005), Cibula et al. (2005)], de détecteurs acoustiques
[Park et al. (2005)] et d'hydrophones à fibre optique [Cielo et al. (1985)]. La figure 1.2 présente les autres interféromètres les plus répandus'^. Il s'agit des interféromètres de Mach-Zehnder, Michelson, et de Sagnac.
Séparateurs
"> %m
Séparateur '/< (c) Séparateur-Figure 1.2 Interféromètres (a) de Mach-Zehnder; (b) de Michelson; (c) de Sagnac.
Tous ces interféromètres sont composés d'un faisceau initial ^o divisé en deux faisceaux t/// et y/2 empruntant des chemins différents puis superposés en un faisceau final y/. À titre d'exemples de capteurs basés sur ces interféromètres, Tveten et al. (1980) et Wu et al. (2004), utilisent respectivement des interféromètres de Mach-Zehnder et de Michelson à la base d'accéléromètres à fibre optique. Pour sa part, l'interféromètre de Sagnac implique une configuration en anneau et la circulation de deux faisceaux, dans le sens horaire et antihoraire respectivement. Il est surtout utilisé comme principe de fonctionnement du gyroscope à fibre optique, un capteur ayant une grande part du marché des capteurs à fibre optique [Udd (1993)] utilisés en navigation. Le gyroscope à fibre optique est un appareil permettant de
rapport à un axe perpendiculaire passant par son centre, le chemin optique d'un des faisceaux va raccourcir par rapport au deuxième [Hecht (2002)]. La modulation de la phase entre les 2 faisceaux superposés permet de mesurer la vitesse de rotation de F interféromètre de Sagnac. II est à noter qu'un autre point commun aux capteurs à modulation de la phase est une haute résolution au prix de systèmes de détection complexes et coûteux.
1.1.6 Capteurs à modulation de l'état de polarisation
Les capteurs à modulation de l'état de polarisation font appel à la nature ondulatoire et électromagnétique de la lumière et impliquent la notion de biréfringence. La polarisation dépend de l'orientation du champ électrique du faisceau et est définie comme le phénomène par lequel la lumière est restreinte dans l'orientation de son plan d'oscillation par rapport à sa direction de propagation [Hecht (2002)]. La biréfringence est une mesure de la perturbation de cet état de polarisation qui apparaît lorsqu'un faisceau émis a directions de propagation polarisées différemment [Saieh (1991)]. Cet effet peut être causé par une distribution de contraintes non uniformes dans la fibre ou par des défauts internes (ellipticité du cœur de la fibre, anisotropic de la distribution de l'indice de réfraction, etc.). En pratique, les variations de l'état de polarisation sont difficiles à interpréter [Culshaw (1982)] et des fibres spécialisées maintenant leur état de polarisation dans une certaine direction sont conçues pour obtenir une meilleure sensibilité. Un bon exemple est le capteur de déformation de Chmielewska et al. (2004) utilisant une fibre avec cœur elliptique comme élément sensible. Il est à noter que les capteurs à modulation de l'état de polarisation sont parfois regroupés avec les capteurs à modulation de pha.se, puisqu'ils nécessitent des techniques interférométriques pour détecter les changements de pha.se de différentes polarisations [Kyuma (1982)]. C'est le cas pour l'accéléromètre à fibre optique de Castro et al. (1992) qui fait usage d'un interféromètre de Mach-Zehnder. Les capteurs à modulation de l'état de polarisation impliquent également de très hautes résolutions mais les systèmes de détection requis sont complexes et coiiteux.
1.1.7 Capteurs à modulation de la longueur d'onde
Les capteurs à modulation de la longueur d'onde utilisent des réseaux de Bragg sur fibre comme élément sensible. Ces derniers découlent de la photosensibilité des fibres dopées au germanium découverte au Canada par Hill et al. (1978). Ils sont fabriqués en exposant le cœur de ces fibres à un patron d'interférence d'ultraviolets, ce qui y in.scrit un changement
V,-^r
-^X
> < ■ '^t > ^rK
->ÀFigure 1.3 Réflexion et transmission d'un faisceau passant par un réseau de Bragg sur fibre.
Tout faisceau incident i//; passant par le réseau ainsi formé voit une fraction de son spectre ^, être réfléchie à une longueur d'onde An spécifique alors que le reste du signal i//, est transmis. La longueur d'onde An est dépendante entre autres du pas du réseau. Conséquemment, les réseaux de Bragg sur fibre sont très sensibles aux déformations et par extension aux variations de température (un changement de 1 "C correspond à \0 /j£ [Culshaw (2004)]) puisqu'elles changent le pas du réseau. Ils sont donc appliqués à la mesure de déformations [Lawrence et al. (1999)], température [Monzon-Hernandez et al. (2004)], force [Zhao et al. (2005)], déplacement [Dong et al. (2005)], pressions [Swart et al. (2005)], etc. De plus, l'une des possibilités les plus intéressantes des réseaux de Bragg sur fibre est le multiplexage. Il est en effet possible d'inclure sur une même fibre plusieurs réseaux de Bragg réfléchissant la lumière à des longueurs d'onde différentes (À/si, ÀB2, ^B.U ■■■) et de récupérer et traiter tous les signaux avec un seul démodulateur. Dans cet ordre d'idées, Sun et al. (2006) installent des fibres contenant plusieurs réseaux de Bragg sur un pont pour prendre des mesures simultanées de déformation à différents endroits de la structure. Tel que mentionné précédemment, pour extraire l'information du signal d'un capteur à base de réseau de Bragg sur fibre, on doit utiliser des démodulateurs. Ces derniers peuvent être simples (avec une résolution limitée), mais comme ils deviennent complexes et dispendieux lorsque de meilleures performances
sont requises [Lee (2003)], les capteurs à modulation de la longueur d'onde ne sont pas toujours abordables. Enfin, notons que les réseaux de Bragg sur fibre sont très répandus. Selon le centre de recherche sur les communications du Canada, depuis leur introduction sur le marché en 1995, leur utilisation commerciale croît exponentiellement [Lance (2006)].
1.1.8 Capteurs à modulation d'intensité
Tel qu'énoncé précédemment, les trois premiers types de capteurs présentés jusqu'ici (à modulation de la phase, de l'état de polarisation et de la longueur d'onde) offrent de très bonnes résolutions, mais au détriment de leur accessibilité en termes de coût. Par opposition, les capteurs à modulation d'intensité impliquent généralement des sensibilités et résolutions moins importantes, mais offrent des solutions beaucoup plus abordables, ce pourquoi nous nous intéresserons ici davantage à ce type de capteur. En effet, ces derniers utilisent la modulation de l'intensité (ou de la puissance) optique comme principe de fonctionnement et ne requièrent principalement qu'une source et des photodétecteurs, d'oii leur grande simplicité et leur faible coût. Par contre, les capteurs à modulation de l'intensité sont parfois rejetés puisqu'ils présentent classiquement les désavantages suivants :
• mesure affectée par l'instabilité de la source ; • faible sensibilité ;
• mesure sensible aux pertes d'insertion des fibres (présentes à chaque fois que les fibres
sont connectées ou déconnectées et différentes d'une fois à l'autre) ; • comportement du phénomène modulé pas nécessairement linéaire. Nous verrons plus loin que ces désavantages peuvent être contournés.
Tel que mentionné précédemment, les capteurs à fibre opfique peuvent être intrinsèques ou extrinsèques. Pour les capteurs à modulation d'intensité, on peut ajouter un niveau de classification en regroupant les capteurs selon cette dernière distinction et leur principe de fonctionnement, tel qu'illustré à la figure 1.4.
INTRINSÈQUES ATTÉNUATION DU SIGNAL DANS LA FIBRE (section 1.1.9) EXTRINSÈQUES COUPLAGE OPTIQUE ENTRE FIBRES (section 1.1.10) VARIATION DE L'INDICE DE RÉFRACTION COURBURE DE LA FIBRE
y ï
RÉFLEXION (section 1.1.11) OBTURATEUR ENTRE LES FIBRES (section 1.1.12) DÉSALIGNEMENTS ENTRE LES FIBRES (section 1.1.13)Figure 1.4 Classification des capteurs à fibre optique à modulation d'intensité.
Notons que les capteurs à fibre optique peuvent utiliser des fibres monomodes ou multimodes. Le diamètre du coeur des fibres optiques multimodes est suffisamment important (typiquement de plus de ."iO jMn) pour permettre la propagation de plusieurs modes simultanément (allant parfois jusqu'à des milliers). Cela implique par contre le phénomène de dispersion intermodale qui rend la distribution d'intensité encore plus instable et discontinue [Hecht (2002)]. Pour les fibres optiques monomodes (ayant typiquement un cœur de moins de 10 jAm de diamètre), un seul mode de propagation est possible. Le problème de la dispersion intermodale est alors évité au prix d'une utilisation plus difficile, l'ordre de grandeur du cœur de la fibre monomode impliquant un alignement très précis, de l'ordre du micron.
1.1.9 Capteurs à modulation d'intensité intrinsèques
Les capteurs à modulation d'intensité intrinsèques sont basés sur l'atténuation du signal dans la fibre causée par la quantité à mesurer. Certes le signal transmis dans toute fibre optique est atténué, mais c'est lorsque la condition de réflexion totale interne n'est plus respectée que la perte de signal devient suffisamment importante pour être modulée en fonction d'un mesurande. Rappelons que le phénomène de réflexion totale interne permet d'expliquer le confinement et le guidage de la lumière dans la fibre. Lorsque la lumière atteint une interface entre deux milieux, elle est normalement réfléchie et réfractée. Par contre, si l'angle d'incidence est plus grand qu'un certain angle critique, la lumière est totalement réfléchie. L'angle critique est fonction du rapport des indices de réfraction des deux milieux
[Hecht (1999)]. Dans cet ordre d'idées, l'atténuation de signal modulée dans les capteurs à modulation d'intensité intrinsèques peut avoir deux causes : un changement d'indice de réfraction (comme pour le capteur de niveau de liquide de Raatikainen et al. (1997)) ou des courbures de la fibre (comme pour les capteurs de déplacement de Lagakos et al. (1981) et Li et al. (2003)). Ces dernières causes impliquent un changement respectivement de l'angle critique ou de l'angle de réflexion qui peuvent amener la fibre à ne plus respecter les conditions permettant la réflexion totale interne du signal tran.smis.
1.1.10 Capteurs à modulation d'intensité extrinsèques
Les capteurs à modulation d'intensité extrin.sèques sont basés .sur le phénomène de couplage optique entre fibres. Essentiellement, ce sont des capteurs de déplacement et ils peuvent être regroupés selon leurs principes de fonctionnement, tel que présentés par Culshaw étal. (1988), c'est-à-dire:
• la réflexion de faisceaux de lumière ; • la présence d'un obturateur entre les fibres ; • la présence de désalignements entre les fibres.
1.1.11 Capteurs à modulation d'intensité basés sur la réflexion
Parmi les capteurs à modulation d'intensité, les capteurs basés sur la réflexion de faisceaux de lumière sont, à la connaissance de l'auteur, ceux qui ont fait l'objet du plus grand nombre de publication depuis les années 1970. Dans ce cas, le capteur est constitué d'une sonde composée de fibres parallèles par laquelle la lumière e.st émise puis captée après réflexion sur une surface, tel qu'illustré à la figure 1.5.
SONDE
(FIBRES ÉMETTRICES
ET RÉCEPTRICES)
SURFACE
RÉFLÉCHISSANTE
Le faisceau émis est divergent et l'augmentation de la distance entre la sonde et la surface étudiée module la quantité de lumière captée par les fibres réceptrices. Le brevet original du premier à avoir été développé, un capteur de déplacement avec une fibre réceptrice et une fibre émettrice, revient à Kissinger (1967) et depuis, plusieurs autres en ont été dérivés. En effet, à titre d'exemple, Cook et al. (1979) et Johnson et al. (1985) sont parmi ceux à avoir proposé une variante avec six fibres réceptrices placées autour de la fibre émettrice pour une mesure de déplacement respectivement à une et deux dimensions et Shimamoto et al. (1996) ont proposé l'utilisation d'un large groupe de fibres émettrices et réceptrices dans la sonde pour capter de plus en plus de lumière et augmenter la course du capteur.
1.1.12 Capteurs à modulation d'intensité causée par la présence d'un
obturateur
Pour les capteurs à modulation d'intensité causée par la présence d'un obturateur entre les fibres, la lumière est également transmise d'une fibre émettrice à une fibre réceptrice, mais est affectée par la présence d'éléments optiques (écran, prisme, réseau, lentille, etc.) qui transforment le faisceau transmis en fonction de leur position. Un exemple simple est l'accéléromètre proposé par Lee et al. (2004) qui utilise le déplacement d'un élément en porte-à-faux entre 2 fibres pour bloquer une partie du signal et moduler l'intensité captée par la fibre réceptrice.
1.1.13 Capteurs à modulation d'intensité causée par la présence de
désalignements entre les fibres
Finalement, la modulation d'intensité peut être causée par la présence de désalignements entre les fibres qui peuvent être, latéral, axial ou angulaire, tel qu'illustré à la figure 1.6 (a), (b) et {cf.
Source
0^
Fibre A Fibre Détecteur s Fibre Fibre J C 0 (a) Latéral S (b) Axial (c) Angulaire DO
A O (d) DifférentielFigure 1.6 Capteurs à fibre optique à modulation d'intensité causée par la présence de
désalignements : (a) latéral, (b) axial, (c) angulaire, (d) latéral (capteur différentiel).
Plutôt que d'être basés directement sur la modulation d'intensité transmise, les capteurs différentiels (voir figure 1.6 (d)) utilisent comme information des différences d'informations provenant de différentes fibres réceptrices, ce qui mène à des propriétés intéressantes dont l'immunité à l'instabilité de la source [Lu et al. (1996)]. A la connaissance de l'auteur, les capteurs à fibre optique à modulation d'intensité basée sur la présence de désalignements entre les fibres semblent être strictement utilisés comme accéléromètres à basse fréquence utilisant le déplacement d'une fibre émettrice en porte-à-faux pour moduler l'intensité du faisceau transmis, te! qu'illustré à la figure 1.7.
FIBRE ÉMETTRICE ^ FIBRE RÉCEPTRICE /
/y /y///// /^^/^//////yy//////
Figure 1.7 Fibre optique en porte-à-faux utilisée comme élément sensible d'un accéléromètre.
Dans la majorité des applications, la fibre multimode est utilisée pour des mesures à une dimension [Rines (1981), Morante et al (1996), Lopez-Higuera eï al. (1997), Kalenik et al. (1998)]. Les applications avec fibre monomode [Yang et al. (2000)] ou à multiples axes semblent très limitées. En effet, l'accéléromètre différentiel à fibre multimode proposé par
Doyle et al. (2000) est un des rares capteurs à modulation d'intensité basée sur la présence de désalignements entre les fibres à permettre une mesure à deux dimensions.
1.2 Problématique de recherche
À ce jour, à la connaissance de l'auteur, le développement de capteurs à fibre optique à modulation d'intensité causée par la présence de désalignements entre les fibres est donc plutôt limité. 11 en est de même pour les possibilités de capteurs simples multidimensionnels. Par contre, dans sa thèse, St-Amant (2004) a dérivé un nouveau contenu théorique concernant l'alignement optique entre fibres monomodes. Il aborde notamment la problématique de couplage optique en présence de désalignements selon cinq axes simultanément. Basés entre autres sur ces nouveaux éléments de compréhension en matière d'alignement, les présents travaux de recherche visent à explorer les possibilités de développement de nouveaux capteurs de déplacements à fibre optique monomode à modulation d'intensité causée par la présence de désalignements entre les fibres. Cette nouvelle génération de capteurs devrait permettre des solutions abordables en évitant les désavantages classiques des capteurs à modulation d'intensité cités précédemment, soit une mesure affectée par l'instabilité de la source, une faible sensibilité du capteur, une mesure sensible aux pertes d'insertion des fibres et un comportement pas nécessairement linéaire.
1.3 Objectifs de recherche
L'objectif principal est de développer des nouveaux principes de fonctionnement de capteurs de déplacements à fibre optique monomode à modulation d'intensité causée par la présence de désalignements entre les fibres. Puisque le développement de tels capteurs est plutôt limité à ce jour, la démarche de ce projet se veut tout d'abord exploratoire avec un fondement théorique et une compréhension accrue des phénomènes impliqués. Notons que les applications visées impliquent des courses faibles (inférieures à 1 mm) comme c'est le cas pour un grand nombre de systèmes de micropositionnement. Les visées secondaires de ces travaux sont :
• de contourner les désavantages classiques des capteurs à modulation d'intensité ; • d'obtenir des comportements linéaires autant que possible ;
• de repousser les limites de la mesure multidimensionnelle ;
• d'obtenir les meilleures performances possibles (haute résolution, course et sensibilité importantes, faible erreur de mesure).
Notons que le choix du déplacement comme mesurande implique un large éventail d'applications puisque plusieurs quantités peuvent en être dérivées (déformation, pression, vibrations, accélération, etc.) tout dépendant des performances du capteur. Pour l'évaluation quantitative de la performance des capteurs développés dans le cadre de ce projet de recherche, les critères de performance suivants seront considérés (voir terminologie) :
• Erreur de non linéarité ; • Sensibilité ;
• Course ; • Résolution.
1.4 Présentation du mémoire
Chapitre 2 : Capteur linéaire à une dimension
Le chapitre 2 présente la structure d'un nouveau capteur basé sur une zone linéaire du comportement de la puissance optique transmise entre des fibres désalignées latéralement. La structure du capteur proposé est présentée. Le champ optique de la fibre monomode, sa propagation dans l'air libre et la notion d'efficacité de couplage sont détaillés. Les performances expérimentales et les possibilités du capteur sont évaluées quantitativement par une étude de l'erreur de non linéarité, de la sensibilité, de la course et de la résolution.
Chapitre 3 : Capteur différentiel linéaire à une ou deux dimensions
Le chapitre 3 présente le principe de fonctionnement de capteurs différentiels linéaires à une et deux dimensions basés sur la zone gaussienne du comportement du phénomène d'efficacité de couplage entre fibre désalignées latéralement. La structure des capteurs proposés, la théorie associée au faisceau gaussien, des modèles analytiques d'efficacité de couplage en deux ou trois dimensions et le comportement théorique des capteurs propo.sés sont décrits de même que les avantages liés aux capteurs différentiels. Les performances et les possibilités des capteurs sont ensuite validées expérimentalement par une étude de l'erreur de non linéarité, de la sensibilité, de la course et de la résolution.
Chapitre 4 : Autres concepts de capteurs
Le chapitre 4 présente une étude sommaire de quelques autres solutions de capteurs potentiels considérées dans les présents travaux de recherche sans en approfondir l'étude de performances. Un capteur différentiel de déplacement axial et son extension à un capteur à trois dimensions, un capteur différentiel de déplacement angulaire et son extension à un
capteur à deux dimensions ainsi qu'un capteur non linéaire utilisant des réseaux neuroniques pour une mesure potentielle à six dimensions sont proposés.
Chapitre 5 : Conclusion
Le chapitre 5 revient sur les éléments les plus pertinents du mémoire et oriente
Chapitre 2
CAPTEUR LINEAIRE A UNE
DIMENSION
2.1 Introduction
À la base du principe de fonctionnement d'un capteur, il est particulièrement intéressant de trouver une relation linéaire entre le phénomène modulé et le mesurande. En effet, un tel comportement est grandement souhaité puisqu'il implique entre autres une sensibilité constante et une plus grande facilité d'utilisation. Ce chapitre présente un nouveau principe de fonctionnement linéaire pour un capteur de déplacement à une dimension. Jusqu'à maintenant, des modèles théoriques basés sur des faisceaux gaussiens ont été développés pour prédire l'efficacité du couplage optique entre fibres monomodes. Ces modèles sont entre autres utilisés pour étudier des problématiques d'alignement de composantes optiques et ils approximent le mode de propagation des fibres par des faisceaux gaussiens. La plus grande particularité de ces modèles est qu'ils ne sont valables que pour de faibles désalignements latéraux.
Ce chapitre présente en premier lieu la structure d'un nouveau capteur ainsi que la théorie et les éléments de compréhension à la base de son comportement. Dans cette section, la structure du capteur proposé est tout d'abord présentée, puis le champ optique de la fibre monomode, sa propagation dans l'air libre et la notion d'efficacité de couplage sont décrits. Ensuite, le calcul numérique de l'efficacité de couplage optique est effectué et le comportement du capteur est simulé numériquement. Finalement, les performances expérimentales et les possibilités du capteur sont évaluées quantitativement par une étude de l'erreur de non linéarité, de la sensibilité, de la course et de la résolution.
2.2 Théorie
Dans la littérature scientifique, on approxime souvent le champ optique propagé par une fibre monomode par un champ ayant une distribution gaussienne. Cette approximation comporte de nombreux avantages d'un point de vue analytique, mais sa validité est limitée à une faible zone autour de l'axe de la fibre optique. À partir de cette approximation, on peut déterminer la distribution d'efficacité de couplage (;;) en fonction d'un désalignement latéral (x) entre deux fibres (voir figure 2.2). La figure 2.1 compare cette distribution d'efficacité de couplage théorique (en décibels) avec celle mesurée expérimentalement pour un balayage transversai typique (avec la fibre SMF-28® de Corning®).
m -a u 10 20 30 40 50 60 7 0 ♦ > ■♦ ♦ * y • / ♦ / / * / ♦ / • / / / / / / / / / / / / \ ♦ \ \ ♦ \ . \ \ ♦ \ \ \ y \ \ \ \ 1 1 1 ^ * ♦ ♦ ♦ ♦ 1 -30 -20 -10 0 X (i.i.m) 10 20 30
Figure 2.1 Distribution latérale d'efficacité de couplage théorique basée sur des faisceaux gaussiens (trait discontinu) et distribution expérimentale (points).
D'une part, on remarque que l'approximation gaussienne n'est valable que pour des désalignements latéraux {x) faibles, ce qui est souvent le cas dans des problématiques d'alignement. D'autre part, on remarque des zones linéaires dans la distribution expérimentale pour des désalignements latéraux (A) plus importants. Pour un capteur de déplacement basé
sur le couplage optique de fibres, la zone de mesure n'est pas nécessairement limitée à des désalignements latéraux faibles et un modèle plus adapté doit donc être développé, ce qui est présenté dans les sous-sections suivantes.
2.2.1 Structure du capteur proposé
La figure 2.2 présente la structure d'un capteur de déplacement basé sur ce comportement linéaire observé précédemment.
X
^ z
Figure 2.2 Structure de base et principe de fonctionnement du capteur proposé.
Le capteur est composé d'une fibre émettrice et d'une fibre réceptrice espacées d'une distance axiale constante (z). Un désalignement latéral initial situe la fibre réceptrice dans une zone linéaire de la distribution d'efficacité de couplage optique. Notons que c'est l'étendue de cette zone qui limite la course du capteur et sa linéarité qui limite sa précision.
2.2.2 C h a m p optique émis par une fibre optique m o n o m o d e
Une expression plus juste que la distribution gaussienne du champ optique de la fibre monomode est formulée par Buck (1995). Selon ce dernier, l'expression de ce champ est donnée par :
^{r)=^,J,
itrip
AMy^
' ^''
r < a r>a (2.1)'KM
\a
où ^ocst l'amplitude du champ optique, r est le rayon du champ optique considéré par rapport à l'axe optique du faisceau, Jo et Ko sont respectivement les fonctions de Bessei de première et de seconde espèce d'ordre 0, a est le rayon du cœur de la fibre optique et w et w sont
respectivement les constantes de propagation et d'atténuation transverses normalisées . La figure 2.3 compiire le champ optique propagé dans une fibre monomode et un faisceau gaussien. 05 o 10 15 x([j.m) 10 15 x([j.m)
Figure 2.3 Comparaison entre le champ optique propagé dans la fibre (trait plein) et un faisceau gaussien (trait discontinu) sur une échelle linéaire et en décibels.
L'approximation gaussienne n'est valable que pour une faible zone autour de l'axe de la fibre optique {x faible) et ne peut donc pas être utilisée pour faire l'analyse d'un capteur faisant intervenir d'importants désalignements latéraux.
2.2.3 Propagation du c h a m p optique dans l'air libre
Lorsque le couplage optique s'effectue entre deux fibres espacées axialement, le faisceau émis par la fibre émettrice doit se propager dans l'air libre jusqu'à la fibre réceptrice.
u et w sont les solutions d'équations aux valeurs propres qui reviennent à la condition suivante :
y,(M) W K^{W)
J(){u) u K„{w)
en considérant
W = yJV' - M "
où Ji cl Kl sont respectivement les fonctions de Bessel de première et de seconde espèce d'ordre I, V = akçj-^n^ — «T est le paramètre de fréquence normalisé, k^^ = ^ ' ^ ; est le nombre d'onde, À est la longueur d'onde et »; et /ij sont respectivemenl les indices de réfraction du cœur et de la gaine de la fibre. A titre indicatif, pour un faisceau guidé à 1550 nm dans la fibre SMF-28® de Corning®, le paramètre de fréquence normalisé V est 1,9648, Ixs expressions (2.2) et (2.3) forment un système de deux équations et deux inconnues. Pour la libre monomcxie, u et w sont uniques. Pour la SMF-28® à 1550/I/TJ, OU trouve (( = 1,5194 et w= 1,2457.
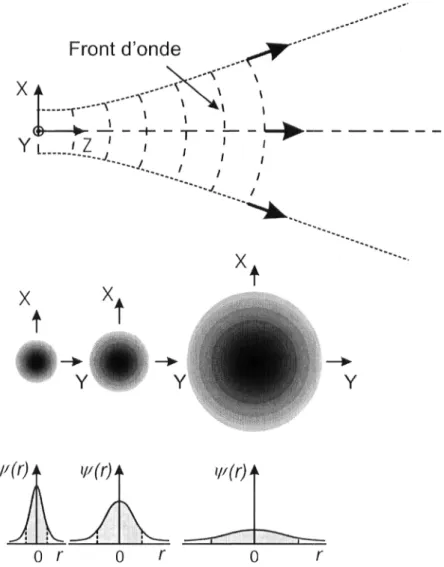
À mesure que le faisceau émis se propage hors de la fibre, il diverge et la distribution radiale du champ optique change. La figure 2.4 illustre ce phénomène".
X
Front d'onde
A" Y L >Z , I / Y , aX
t
ê
Y
'{r). J% w(r)i 1 ^ — - ^ k '//Cr)A Q r Q r 0 rFigure 2.4 Faisceau optique divergeant à mesure qu'il se propage dans l'air libre.
Pour connaître l'expression d'un champ optique quelconque après propagation dans l'air libre, on peut utiliser l'intégrale de Huygens-Fresnel (aussi appelée intégrale de Fresnel-Kirchhoff). Selon Sicgman (1986), en coordonnées cylindriques circulaires, on décompose le champ optique émis en harmoniques circulaires et son expression avant et après propagation est donnée par :
^,„(-',^')=i:n„;('-'>"'"
(2.2)'V,Jr,û)^J]^,„Jry
jie (2.3) ou'V.^Jr)-.
^ 2 ^ Àz \r'e 7.mr '\ \ Az ) (2.4)y/in et \j/„ut sont respectivement les champs optiques avant et après propagation, / est l'harmonique circulaire considérée, z e.st la distance de propagation et r et r' sont respectivement le rayon du champ optique considéré avant et après propagation. Pour les faisceaux à symétrie de révolution (comme le champ optique émis par une fibre monomode axisymétrique), seule l'harmonique / = 0 est non nulle et le champ propagé devient donc :
"V (r,^)=H'„,„(/-) = 2 ^
Xz jr'e J,
2nrr ' \
4>,,(r'K' (2.5)
Par conséquent, en injectant l'équation (2.1 ) dans l'équation (2.5), le champ optique émis par une fibre monomode après propagation dans l'air libre sur une distance z devient :
r,„»^^F.-^'-"-'A,
+ — ^]re Àz J,Ur'^
dr'h3'
\ a J iTtrr'"AT
\K, (2.6) {r')dr' ^^- ^oM! A ^z J \ a JÀ la connais.sance de l'auteur, les intégrales précédentes sont insolubles analytiquement. Une discrétisation numérique sera donc utilisée (voir section 2.2.5) à l'aide du logiciel MATLAB® pour évaluer l'expression du champ optique propagé.
2.2.4 Efficacité de couplage optique
La puissance optique transmise à une fibre réceptrice est calculée à l'aide de l'efficacité de couplage optique. La figure 2.5 présente le couplage optique entre deux fibres optiques en présence d'un désalignement axial (z) et d'un désalignement latéral (x). Pi et P2 sont respectivement les puissances optiques émise et transmise.
A
Pi
z = z.
Pz
Figure 2.5 Couplage optique entre une fibre émettrice et une fibre réceptrice.
Par définition, l'efficacité de couplage optique est donnée par le rapport de la puissance transmise sur la puissance émise exprimées en watts :
P\W] (2.7)
J jî^iU}',^
LL^'(-^'>''^^
'■i,)wlix,y,Zi,)dxdy ,)y/l{x,y,Zi,)dxdyj lw2i^,y,z,,)
1 y/^ix,} ),Zi,)dxdyMathématiquement, une méthode couramment utilisée pour calculer l'efficacité de couplage entre deux fibres dont on connaît le champ optique est celle de l'intégrale de recouvrement [Neumann (1988)]. Cette méthode implique de superposer les champs optiques normalisés des fibres émettrice et réceptrice sur un plan quelconque entre elles et d'intégrer leur produit, ce qui peut être exprimé de la façon suivante :
(2.8)
oii y/i(x,y, Zp) et y/2(x,y, Zp) sont les expressions des champs optiques au plan z = Zp (illustré à la figure 2.5) des fibres émettrice et réceptrice respectivement. (// i(x, y, Zp) et i// 2(x, y, Zp) sont leurs conjugués complexes. Pour connaître l'efficacité de couplage optique entre deux fibres monomodes, il suffit donc d'appliquer la méthode de l'intégrale de recouvrement en superposant les champs optiques des fibres. Pour réduire les calculs, le plan de la surface de la fibre réceptrice {z.=Zp) e.st utilisé, cas illustré à la figure 2.5. Dans ce cas, les deux champs superposés sont le champ optique de la fibre émettrice propagé dans l'air libre jusqu'au plan z=Zp et le champ guidé dans la fibre (son mode de propagation fondamental).
Il est courant d'exprimer l'efficacité de couplage optique en décibels, soit :
;7[â'fi] = 101og;7 = 101og
^pJivP
(2.9)De plus, notons que la puissance optique captée par un photodétecteur est habituellement donnée en milliwatt (inW) ou en dBm. La puissance optique en dBm est une unité de mesure représentant une puissance relative à 1 mW. La puissance transmise en mWpeut être convertie en dBm à partir de la relation suivante :
P,[dBm]= \0\og ^Pj/wH/p (2.10)
\mW
Compte tenu des propriétés des fonctions logarithmiques de l'équation (2.9), l'efficacité de couplage optique en décibels peut être calculée à partir des données de puissances émise et transmise :
Jj[dB] = P, [dBm]- P, [dBm] (2.11) Cette relation indique que le comportement de la puissance optique transmise (P2) en dBm est
le même que celui de l'efficacité de couplage (;;) en dB à une constante près, c'est-à-dire avec une différence correspondant à la valeur de la puissance optique émise {Pi) en dBm. Par conséquent, en recherche de relations linéaires, le fait d'étudier le comportement de la puissance optique transmise en dBm ou de l'efficacité de couplage en dB revient au même. Ainsi, pour des raisons pratiques, on quantifiera le couplage optique en termes d'efficacité de couplage (77) théoriquement et en termes de puissance optique transmise {P2) expérimentalement.
2.2.5 Calcul n u m é r i q u e de l'efficacité de couplage optique
Le calcul de l'efficacité de couplage est réalisé avec l'équation (2.7) dans laquelle iffj est donné par l'expression (2.1) et y/i est défini par l'intégrale (2.5) qui, tel que mentionné précédemment, est insoluble analytiquement. Une approche numérique est donc privilégiée et pour ce faire, du code est développé dans MATLAB®. Les spécifications de la fibre SMF-28® de Corning® sont considérées puisque c'est la fibre utilisée pour la validation expérimentale. Pour une configuration donnée, on évalue numériquement par discrétisation la distribution du champ optique propagé d'une fibre à l'autre (par l'intégrale de Huygens-Fresnel), puis on fait de même en procédant à l'intégrale de recouvrement sur l'aire du pian de superposition de ce champ propagé et du champ de la fibre réceptrice. Les discrétisations liées à la résolution des
intégrales qui mènent au calcul de l'efficacité de couplage impliquent la considération d'un nombre très important de points pour chaque configuration étudiée.
Également, par opposition à une résolution analytique, dans le cadre d'une évaluation numérique, on doit considérer des limites finies d'intégration. Il a été vérifié qu'un rayon de \0 fim pour l'intégrale de Huygens-Fresnel est suffisant. En effet, dans la fibre monomode, la puissance guidée est concentrée dans le coeur et chute rapidement dans la gaine, peu importe l'espacement entre les fibres (z) considéré et le rayon du cœur de la fibre SMF-28®est de 4,1 jUm. Plus l'espacement (z) entre les fibres est important, plus le faisceau émis diverge (voir figure 2.4) et plus le rayon à considérer dans l'intégrale de recouvrement est grand. À titre indicatif, dans les simulations réalisées ici, pour un espacement de 50 /uin et de 10 mm entre les fibres, le rayon d'intégration nécessaire était respectivement de 50 jUm et 1,5 mm.
Pour une résolution constante de l'intégrale de recouvrement, le nombre de points à calculer devient considérable à mesure que l'espacement entre les fibres (z) considéré augmente, de même que le temps de calcul. Pour évaluer la distribution d'efficacité de couplage pour des espacements importants, étant limités en puissance de calcul disponible, les résolutions de l'intégrale de Huygens-Fresnel et de l'intégrale de recouvrement ont dû être diminuées, ce qui est une cause certaine d'imprécision. En effet, pour un espacement de 50 jL/m, ces résolutions étaient respectivement de 0,1 jUm et 0,5 //m alors qu'elles ont été limitées à 1 ^m et 5 jUm pour un espacement de 10 mm, ce qui est considérablement important comparativement à la longueur d'onde propagée (1,55 jUm).
En somme, .seule une évaluation qualitative du potentiel théorique linéaire du principe à la base du capteur est considérée. La présente étude théorique n'est pas exhaustive et a pour but de dégager des tendances réalistes. Seules les performances expérimentales du capteur proposé (sensibilité, résolution, course et erreur de non linéarité) seront évaluées rigoureusement.
2.2.6 Simulation numérique du c o m p o r t e m e n t du capteur
La figure 2.6 présente donc la distribution d'efficacité de couplage optique en décibels calculée en fonction de x pour un espacement axial nul (sans propagation) entre deux fibres SMF-28® de Corning® ( voir spécifications techniques à l'annexe A). La fibre SMF-28® est une fibre optique commerciale et sera utilisée dans l'ensemble de ce mémoire pour faire les preuves de concepts.
Figure 2.6 Efficacité de couplage optique théorique en fonction de x pour un espacement nul entre deux fibres SMF-28® de Corning®.
On remarque que la distribution d'efficacité de couplage théorique (en décibels) de la fibre SMF-28" comporte deux zones qui semblent fortement linéaires (une ascendante et une descendante). Par symétrie, on peut analyser seulement la pente ascendante. En limitant l'étendue de cette zone, une régression linéaire peut être utilisée pour déterminer la sensibilité et calculer l'erreur de non linéarité pour une zone .spécifique de la distribution. À titre d'exemple, si on limite l'étendue de la zone linéaire à la portion de la distribution théorique comprise entre 40 et 80 dB (voir figure 2.6), on utilise l'ensemble des points situés entre -37,7.5 //m et -21,755 //m pour calculer la droite de régression. La sensibilité du capteur est donnée par la pente de la droite de régression (en dB/jUm) et l'erreur de non linéarité est donnée par le quotient (en pourcentage) de la position (en jum) qui dévie le plus de la droite de régression par la course totale du capteur (en fim). Pour ce cas, on trouve donc une course de 16 //m, une erreur absolue maximale de 0,05 ///?/, une erreur de non linéarité de 0,3125% et une sensibilité de 2,5 dS/flm.
La figure 2.7 présente la distribution d'efficacité de couplage simulée pour différents espacements (<) entre les fibres. Notons qu'il y a un changement d'échelle en abscisse pour les deux dernières rangées de graphiques.
z = 25 (.im 2 = 75 unn "40 -20 0 20 40 xatm) -40 - 2 0 0 20 40 x(Mm) 0 -10 -20 m - 3 0 B - 4 0 50 -60 -70 Z--- lOOum •D, J — > 40 - 2 0 0 20 40 x(nm) z = 150 M m - 4 0 -20 0 20 40 x(|im) -40 - 2 0 0 20 40 x(i-im) -40 - 2 0 0 20 40 x(i-im) 1 - 1 0 -20 -.Î0 ' ^ - S O -60 -70 z = 250 (jm A
A
i.i. ..M ^ , n,-.JUu ^ — > z= 1 mm -200 -100 0 100 200 x(Mm) -200 -100 0 100 200 x(Mm) -200 -100 0 100 200 x ( | j m ) - 2 5 - 3 0 - 3 5 _— - 4 0 TJ - 4 5 ^ - 5 0 - 5 5 ■60 -65 - 7 0 z = }> mm1
- 2 5 - 3 0 - 3 5 - 4 0 - 4 5 - 5 0 - 5 5 - 6 0 65 - 7 0 z = 5 mm 0 mm -1.5 - 1 -0.5 0 0.5 1 1.5 -1.5 - 1 -0.5 0 0.5 I 1.5 -1.5 -1 -O.S 0 0.5 1 1.5 x(mm) x(mm) x(mm)Figure 2.7 Évolution de l'efficacité de couplage optique théorique en fonction de x après
D'une part, on remarque l'existence du comportement linéaire observé précédemment pour des espacements (z) entre les fibres inférieurs à 50 juin et supérieurs à 250 jUm. D'autre part, pour un espacement entre 50 et 250 juin, la distribution d'efficacité de couplage semble dominée par un comportement parabolique et présente des irrégularités. Intuitivement, on pourrait penser que ces irrégularités sont l'effet d'erreurs causées par les discrétisations numériques. Par contre, ce comportement est observé expérimentalement (voir section 2.3.2).
Le modèle théorique prédit donc des zones linéaires particulièrement intéressantes. Ces zones présentent des linéarités, sensibilités et courses différentes selon l'espacement (z.) entre les fibres considéré puisque le faisceau optique émis par la fibre diverge en se propageant, ce qui fait diminuer entre autres la pente de la zone linéaire. À titre d'exemple, les figures 2.8, 2.9 et 2.10 présentent la sensibilité, la course et l'erreur de non linéarité tracées en fonction de l'espacement entre les fibres pour des zones linéaires limitées à la portion comprise entre -50 et -70 JB de chaque distribution théorique calculée (présentées à la figure 2.7). On utilise une plage de puissance fixe impliquant un comportement relativement linéaire à des fins d'analyse préliminaire.
z (mm)
Figure 2.8 Sensibilité théorique du capteur (échelle logarithmique) en fonction de
700
4 5 6 z(min)
10
Figure 2.9 Course théorique du capteur en fonction de l'espacement entre les fibres pour une
zone considérée linéaire entre -50 et -70 dB.
À mesure qu'un faisceau se propage, il diverge (voir figure 2.4) et sa distribution d'efficacité de couplage latérale s'élargit, ce qui fait augmenter la course et diminuer la sensibilité lorsque l'espacement entre les fibres augmente. Notons que la position de la zone linéaire (considérée fixe en termes d'intervalle de puissance jusqu'à maintenant) dans la distribution influe également sur sa linéarité.
45 40 35 30 25 20 15
Figure 2.10 Erreur de non linéarité théorique du capteur en fonction de l'espacement entre les fibres pour une zone considérée linéaire entre -50 et -70 dB.
On remarque que l'erreur de non linéarité est relativement du même ordre pour les zones limitées à la portion comprise entre -50 et -70 dB, sauf dans la zone à dominance parabolique identifiée précédemment.
Cette analyse des performances théoriques du capteur est assez limitée, entre autres parce que la plage de puissance considérée est fixe. Théoriquement, chaque distribution calculée implique une erreur de simulation numérique. En fait, le but de cette section n'était pas de générer un modèle théorique performant, mais de vérifier si les tendances ob.servées expérimentalement pouvaient être corroborées par la théorie. Les performances et le potentiel du capteur proposé seront quantifiés expérimentalement à la section suivante.
2.3 Performances expérimentales
Cette section présente l'évaluation quantitative des performances et des possibilités du capteur proposé. D'abord, le montage expérimental utilisé est présenté. Ensuite, une étude d'erreur de non linéarité, de sensibilité, de course et de résolution est effectuée à partir de données d'essais expérimentaux.
2.3.1 Montage expérimental
Le principe du capteur développé est basé sur la modulation de la puissance transmise par le désalignement latéral entre les fibres. Afin d'évaluer les performances atteignables du capteur, on doit mesurer la puissance optique transmise (P) et le désalignement latéral (JC). On choisit donc de simuler le comportement des capteurs développés en imposant des désalignements connus entre une fibre émettrice et une fibre réceptrice à l'aide d'un robot de positionnement d'une grande précision. La figure 2.11 présente le montage expérimental utilisé pour évaluer les performances du capteur proposé. Les spécifications respectives des différents éléments du montage sont présentées à l'annexe A.
Figure 2.11 Montage expérimental utilisé.
Lors de cette simulation expérimentale, la fibre émettrice est maintenue fixe et des déplacements sont imposés à la fibre réceptrice. Le robot de positionnement Fr-3000 nanorobot^'^ d'EXFO Burleigh Products Group est utilisé. Il s'agit d'un robot sériel à 6 degrés de liberté {x, y, z, 6x, ôy, 9:) présenté à la figure 2.12.
Figure 2.12 Robot de nanopositionnement, fibres optiques et caméras.
Notons que le robot est basé sur la technologie Inchworm®. Il comporte une course de 25 mm pour chaque platine translationnelle (x, y, z.) de même qu'une résolution de l'encodeur de ± 20 nm et une vitesse maximale de 1,5 mm/s. Les platines angulaires ont une course de 10 degrés, une résolution de l'encodeur de 0,2" (environ 0,00006 degrés) et une vitesse maximale de un degréAv. De plus, le robot est monté sur un bloc de granit afin de minimiser la transmission des vibrations au montage.
La source laser accordable du module IQ-2600 d'EXFO" est utilisée pour émettre le faisceau de lumière de la fibre émettrice. Il s'agit d'un laser en anneau sur fibre dopée à l'erbium, de cohérence moyenne et ayant une longueur d'onde nominale de 1550 nm. La source est utilisée en mode émission spontanée amplifiée et émet une puissance d'environ 5 ilBm. Notons qu'une source de cohérence moyenne est utilisée pour prévenir le phénomène d'interférence [St-Amant (2004)].