Embedding explicit representation of cyber-physical elements in task models
Texte intégral
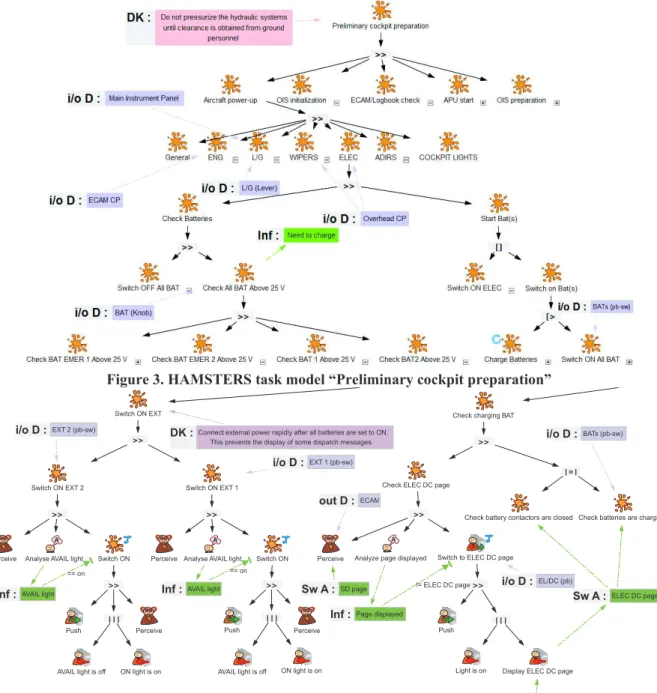
Figure

Documents relatifs
Given: (i ) the DTHS model for the plant of a CPS C; (ii ) the number of bits used for AD and DA conversions (quantisation schema), describing how the control software may read
Besides, from the definition of the block B 2 it follows that the signal 1 can be produced on its output channel o 2 if and only if this block is activated, and some fault in
Multi-paradigm Modelling (MPM) proposes to model every part and aspect of such complex systems explicitly, at the most appropriate level(s) of abstraction, using the most
In the work, the source model is the IEC61499 application while the destination model is the formal Net Condition/Event System (NCES) model and the transformation
We apply IHYDE to identify network models in real-time and to infer transition logic for model changes using data from advanced metering infrastructure. The 33-bus
In fact, to achieve the purpose of the cooperation between the different Information Systems, information must be physically exchanged (technical interoperability), must
Since SysML [28], the OMG 1 standard for sys- tems engineering, is a modeling language commonly used in the industry, and Simulink is a de facto standard for what is referred to
In 5th International Robotic Sailing Conference, pages 107–119, Cardiff, Wales, England, 2012..
