Egalisation aveugle et turbo égalisation dans les
canaux sélectifs en fréquence invariants et variants
dans le temps.
Mémoire présenté
à la Faculté des études supérieures de l'Université Laval dans le cadre du programme de
maîtrise en génie électrique pour l'obtention
du grade de Maître es science (M.Se)
FACULTE DE SCIENCES ET DE GENIE UNIVERSITÉ LAVAL
QUÉBEC
2006
Nous étudions à travers ce travail de recherche les méthodes d'égalisation entraînée et aveugle dans les canaux de communications sélectifs en fréquence invariants et va-riants dans le temps. Ces méthodes d'égalisation trouvent leur place dans un grand nombre d'applications telles que les télécommunications sans fil, le traitement de la parole, etc. L'objectif de l'égalisation entraînée est d'identifier les données émises à par-tir des observations issues de l'antenne et des séquences d'apprentissage préalablement connues par le récepteur. Alors que l'égalisation aveugle consiste à identifier les données émises uniquement à partir des observations issues de l'antenne. Les méthodes aveugles n'ont donc connaissance a priori ni des signaux émis ni du canal de transmission. Dans le cadre de notre recherche, nous proposons trois modèles d'égalisation : deux modèles autodidactes (sans séquence d'apprentissage) pour l'égalisation dans les canaux sélectifs en fréquence et invariants, et un modèle entraîné (avec séquence d'apprentis-sage) pour l'égalisation dans les canaux sélectifs en fréquence et variants dans le temps.
In this research work, we study the blind and trained equalization methods over stationary and time varying frequency sélective channels. Thèse equalization methods find their place in a large number of applications such as wireless Systems, speech processing, etc. The objective of trained equalization is to identify the transmitted data from the received signais and from training séquences known beforehand by the receiver, whereas blind equalization identifies the transmitted data only from the received signais. Blind methods do not hâve a prior information about transmitted signais, nor the channel.
Within the framework of our research, we propose three equalization models : two blind models (without training séquence) for the equalization over stationary frequency sélective channels, and a trained model (with a training séquence) for the equalization over time varying frequency sélective channels.
Je tiens tout d'abord à remercier mon directeur de recherche, le Professeur Huu Tué Huynh et mon codirecteur, le Professeur Jean-Yves Chouinard, pour l'honneur qu'ils m'ont fait en acceptant de diriger mes travaux de recherche et qui m'ont fait découvrir et partager leur vision de recherche.
Mes plus vifs remerciements s'adressent aux membres du jury, Professeur Paul For-tier et Professeur Dominic Grenier de l'Université Laval. Leurs commentaires et leurs suggestions sont très importants pour le développement de mon travail de recherche. J'adresse aussi mes remerciements à tout le personnel du Laboratoire de radiocommu-nications et de traitement du signal (LRTS), professeurs et étudiants et à tous ceux qui m'ont aidé de près ou de loin pour l'accomplissement de ce travail de recherche.
Je souhaite exprimer toute ma reconnaissance à l'état algérien de leur soutien finan-cier.
Je remercie chaleureusement mes parents, mon épouse Karima et mes filles Sabrine et Sarah qui ont fait de mes études leur premier souci.
Résumé i
Abstract ii
Avant-propos iii
Table des matières iv
Liste des figures vii
Liste des tableaux xi
Abréviations xii
Notation xiii
1 Introduction générale 1
1.1 Motivation et problématique 3 1.1.1 Canaux sélectifs en fréquence et invariants 3 1.1.2 Canaux sélectifs en fréquence et variants dans le temps 3 1.2 Contributions de notre recherche 4 1.3 Plan du mémoire 5
2 Revue de la littérature 6
2.1 Introduction 6 2.2 Modèle en temps discret du canal AWGN avec l'interférence entre symboles 7 2.3 Caractérisation du canal radio mobile 11
2.3.1 Fonction d'autocorrélation et densité spectrale de puissance du canal radio mobile 12 2.3.2 Sélectivité fréquentielle 14 2.3.3 Sélectivité temporelle 14 2.3.4 Modèle du canal de Rayleigh 15
2.4 Codage de canal 16 2.4.1 Les codeurs turbo 17 2.4.2 Décodage itératif des codes turbo ' 18 2.5 Principales structures d'égaliseurs 20 2.5.1 Égaliseur linéaire (LE) 21 2.5.2 Égaliseur à retour de décision (DFE) 21 2.5.3 Egaliseur annuleur d'interférences (AI) 22 2.5.4 Egaliseur basé sur une structure en treillis 24 2.6 Algorithmes d'égalisation entraînée 25 2.6.1 Algorithme LMS 25 2.6.2 Algorithme RLS 26 2.7 Comparaison des principales structures d'égaliseurs 27 2.7.1 Comparaisons des égaliseurs LE, DFE et AI 27 2.7.2 Comparaison des égaliseurs DFE et MLSE 28 2.8 Algorithmes d'égalisation autodidacte 30
2.8.1 Egaliseurs utilisant les algorithmes des moindres carrés LMS et RLS en mode de décision directe 30 2.8.2 Algorithme de Sato 31 2.8.3 Algorithme de Godard 31 2.8.4 Algorithme BGR 32 2.9 Conclusion 33 3 Egalisation aveugle dans les canaux invariants sélectifs en fréquence 34 3.1 Introduction 34 3.2 Principe de fonctionnement de l'égaliseur bidirectionnel autodidacte
pro-posé 36 3.3 Evaluation des performances de l'égaliseur bidirectionnel autodidacte . 38 3.3.1 Chaîne de transmission 39 3.3.2 Egaliseur bidirectionnel DD.DFE.LMS - DD.DFE.LMS 40 3.3.3 Egaliseur bidirectionnel DFE.CMA - DD.DFE.LMS 46 3.3.4 Egaliseur bidirectionnel DFE.SATO - DD.DFE.LMS 51 3.3.5 Complexité calculatoire des égaliseurs proposés 56 3.4 Conclusion 57 4 Turbo égalisation aveugle dans les canaux sélectifs en fréquence et
invariants 58 4.1 Introduction 58 4.2 État de l'art en turbo égalisation 59 4.2.1 Turbo égaliseur MAP - MAP 61 4.2.2 Turbo égaliseur AI - MAP 62
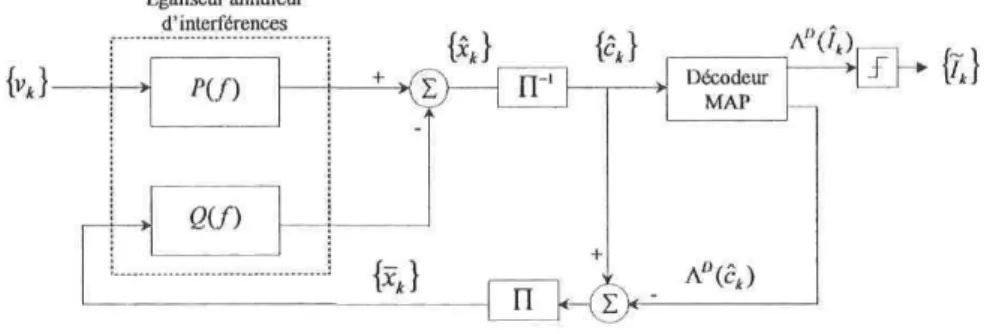
4.2.3 Turbo égaliseur DFE - MAP 63 4.3 Turbo égaliseur aveugle proposé 64 4.3.1 Chaîne de transmission pour le turbo égaliseur aveugle proposé 64 4.3.2 Principe de fonctionnement du turbo égaliseur aveugle 65 4.3.3 Décodage des données 66 4.3.4 Egaliseur annuleur d'interférences 68 4.3.5 Initialisation du turbo égaliseur 73 4.4 Performances du turbo égaliseur proposé . . . 74 4.4.1 Résultats dans le canal A de Proakis 75 4.4.2 Résultats dans le canal B de Proakis 76 4.4.3 Influence de l'égaliseur de la première itération 78 4.4.4 Influence du filtrage d'erreur 79 4.4.5 Influence du facteur de fiabilité de canal . . 79 4.4.6 Complexité calculatoire du turbo égaliseur proposé 81 4.5 Conclusion 82
5 Turbo égalisation dans les canaux sélectifs en fréquence et variants dans le temps 84
5.1 Introduction 84 5.2 Turbo égalisation dans un canal de Rayleigh sélectif en fréquence . . . 85
5.2.1 Chaîne de transmission du turbo égaliseur pour un canal sélectif en fréquence et non stationnaire 86 5.2.2 Architecture globale du turbo égaliseur 86 5.2.3 Egaliseur annuleur d'interférences 88 5.2.4 Estimateur de canal 89 5.2.5 Décodage des données 90 5.2.6 Initialisation du turbo égaliseur 92 5.3 Analyse des performances du turbo égaliseur 94 5.3.1 Performances en terme de taux d'erreur binaire 96 5.3.2 Estimation de canal 102 5.3.3 Erreur quadratique en sortie de l'égaliseur annuleur d'interférences 103 5.3.4 Influence de la vitesse du mobile 103 5.4 Conclusion 104
6 Conclusion et perspectives 106
Bibliographie 108
A Factorisation spectrale d'un canal avec interférences entre symboles 113
2.1 Chaîne de communication pour un canal AWGN avec interférence entre symboles 7 2.2 Modèle discret équivalent de l'interférence entre symboles dans un canal
AWGN 8 2.3 Caractéristiques du canal A de Proakis. a) Réponse en amplitude, b)
Réponse en phase, c) Les zéros de canal 10 2.4 Caractéristiques du canal B de Proakis. a) Réponse en amplitude, b)
Réponse en phase, c) Les zéros de canal 10 2.5 Caractéristiques du canal C de Proakis. a) Réponse en amplitude, b)
Réponse en phase, c) Les zéros de canal 11 2.6 Architecture d'un codeur turbo 17 2.7 Schéma du décodeur turbo 19 2.8 Egaliseur linéaire (LE) 21 2.9 Egaliseur à retour de décision (DFE) 22 2.10 Egaliseur annuleur d'interférences (AI) 23 2.11 a) Modèle d'un canal discret équivalent (L = 2). b) Codeur convolutif
de rendement R = 1/2 24 2.12 Canal B de Proakis. a) Canal discret équivalent, b) Diagramme d'état. 24 2.13 TES des égaliseurs MLSE et DFE pour le modèle de canal B de Proakis. 29 2.14 TES des égaliseurs MLSE et DFE pour le modèle de canal C de Proakis. 29 3.1 Architecture de l'égaliseur bidirectionnel autodidacte proposé 36 3.2 Egaliseur DD.DFE.LMS. a) Evolution de l'erreur quadratique moyenne.
b) Evolution des erreurs de décision 36 3.3 Chaine de transmission pour l'évaluation de l'égaliseur autodidacte
pro-posé 39 3.4 Schéma de l'égaliseur bidirectionnel DD.DFE.LMS - DD.DFE.LMS. . . 41
3.5 Résultats dans le canal A de Proakis. a) Constellation des symboles reçus. b) Constellation des symboles égalisés par l'égaliseur DD.DFE.LMS (1). c) Constellation des symboles égalisés par l'égaliseur DD.DFE.LMS (2). d) Constellation des symboles sélectionnés, e) Evolution de l'EQM de
l'égaliseur DD.DFE.LMS (1). f) Evolution de l'EQM de l'égaliseur DD.DFE.LMS (2) 43 3.6 TES de l'égaliseur bidirectionnel DD.DFE.LMS - DD.DFE.LMS (Canal
A de Proakis) 45 3.7 TES de l'égaliseur bidirectionnel DD.DFE.LMS - DD.DFE.LMS (Canal
B de Proakis) 45 3.8 Schéma de l'égaliseur bidirectionnel DFE.CMA - DD.DFE.LMS 47 3.9 Résultats dans le canal A de Proakis. a) Constellation des symboles
reçus, b) Constellation des symboles égalisés par l'égaliseur DFE.CMA. c) Constellation des symboles égalisés par l'égaliseur DD.DFE.LMS. d) Constellation des symboles sélectionnés, e) Evolution de l'EQM de l'égaliseur DFE.CMA. f) Evolution de l'EQM de l'égaliseur DD.DFE.LMS 48 3.10 TES de l'égaliseur bidirectionnel DFE.CMA - DD.DFE.LMS (Canal A
de Proakis) 50 3.11 TES de l'égaliseur bidirectionnel DFE.CMA - DD.DFE.LMS (Canal B
de Proakis) 50 3.12 Schéma de l'égaliseur bidirectionnel DFE.SATO - DD.DFE.LMS. . . . 52 3.13 Résultats dans le canal A de Proakis. a) constellation des symboles
reçus, b) constellation des symboles égalisés par l'égaliseur DFE.SATO. c) constellation des symboles égalisés par l'égaliseur DD.DFE.LMS. d) Constellation des symboles sélectionnés, e) Evolution de l'EQM de l'égaliseur DFE.SATO. f) Evolution de l'EQM de l'égaliseur DD.DFE.LMS. . . . 53 3.14 TES de l'égaliseur bidirectionnel DFE.SATO - DD.DFE.LMS (Canal A
de Proakis) 55 3.15 TES de l'égaliseur bidirectionnel DFE.SATO - DD.DFE.LMS (Canal B
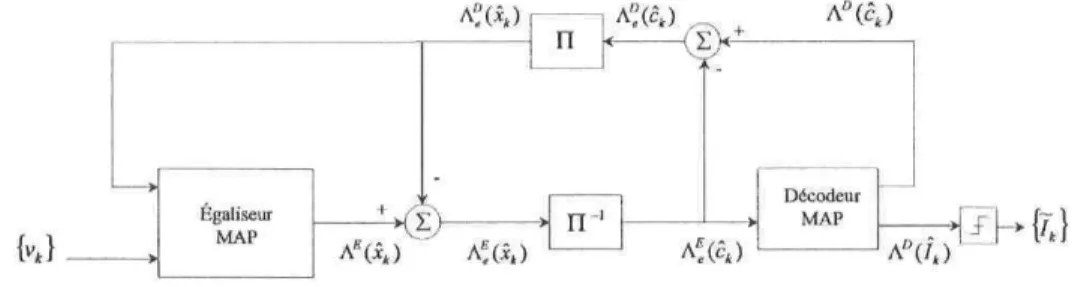
de Proakis) 55 4.1 Chaîne de communication avec un turbo égaliseur 60 4.2 Schéma de principe de la turbo égalisation 60 4.3 Schéma d'un module de turbo égalisation 61 4.4 Turbo égaliseur de type MAP-MAP 61 4.5 Turbo égaliseur de type AI-MAP 62 4.6 Turbo égaliseur de type DFE-MAP 63 4.7 Schéma de la chaîne de transmission pour le turbo égaliseur proposé. . 65 4.8 Schéma du turbo égaliseur aveugle proposé. 66 4.9 Egaliseur AI conventionnel 69 4.10 Egaliseur AI utilisant le retour d'erreur (proposé) 69
4.11 TEB en sortie de l'égaliseur de la première itération et l'égaliseur AI (canal A de Proakis) 75 4.12 TEB en sortie du décodeur LOG-MAP (canal A de Proakis) 76 4.13 TEB en sortie de l'égaliseur de la première itération et l'égaliseur AI
(canal B de Proakis) 77 4.14 TEB en sortie du décodeur LOG-MAP (canal B de Proakis) 77 4.15 Influence de l'égaliseur de la première itération (canal A de Proakis). . 78 4.16 Évolution de l'erreur quadratique moyenne en sortie de l'égaliseur AI
pour un canal B de Proakis et un rapport Eb/No = 5 dB en fonction du nombre de symboles (itérations) 79 4.17 Influence du facteur de fiabilité de canal 80 5.1 Schéma de la chaîne de transmission pour le turbo égaliseur proposé. . 86 5.2 Structure du turbo égaliseur proposé pour les canaux variants dans le
temps, sélectifs en fréquence 87 5.3 Schéma de l'annuleur d'interférences pour le canal non stationnaire, sélectif
en fréquence 89 5.4 Estimateur de canal avec l'algorithme des moindres carrés récursifs (RLS). 90 5.5 Egaliseur à la première itération 93 5.6 Circuit de commande automatique de gain (CAG) 94 5.7 a) Constellation des symboles reçus, b) Constellation des symboles en
sortie de l'égaliseur DFE.RLS, itération 1. c) Constellation des symboles en sortie de l'Ai, itération 2. d) Constellation des symboles en sortie de
l'Ai, itération 3. Eb/N0 = 4 dB, fm = 0.0005 96
5.8 a) Constellation des symboles reçus, b) Constellation des symboles en sortie de l'égaliseur DFE.RLS, itération 1. c) Constellation des symboles en sortie de l'Ai, itération 2. d) Constellation des symboles en sortie de
l'Ai, itération 3. Eb/NQ = 5 dB, fm = 0.001 97
5.9 a) Constellation des symboles reçus, b) Constellation des symboles en sortie de l'égaliseur DFE.RLS, itération 1. c) Constellation des symboles en sortie de l'Ai, itération 2. d) Constellation des symboles en sortie de
l'Ai, itération 3. Eb/N0 = 10 dB, fm = 0.002 97
5.10 TEB en sortie de l'égaliseur à la première itération et en sortie de l'Ai,
fm = 0.0005, trois trajets 98
5.11 TEB en sortie de l'égaliseur à la première itération et en sortie de l'Ai,
fm = 0.001, trois trajets 99
5.12 TEB en sortie de l'égaliseur à la première itération et en sortie de l'Ai,
fm = 0.002, trois trajets 99
5.13 TEB en sortie du décodeur de canal, fm = 0.0005, trois trajets 100 5.14 TEB en sortie du décodeur de canal, fm = 0.001, trois trajets 101 5.15 TEB en sortie du décodeur de canal, fm = 0.002, trois trajets 101
5.16 Enveloppe estimée et réelle du 3i è m e trajet, Eb/N0 =5 dB, fm = 0.001. . 102
5.17 Enveloppe estimée et réelle du 3i è m e trajet, Eb/NQ =8 dB, fm = 0.002. . 102
5.18 Comparaison de l'erreur quadratique moyenne (EQM) en sortie de l'Ai (Iter 2) avec et sans filtrage de l'erreur, Eb/N0 =5 dB, fm = 0.002, trois trajets 103 5.19 TEB en sortie du décodeur de canal, (a) fm = 0.0005, (b) fm = 0.001,
(c) fm = 0.0015, (d) fm = 0.002, (e) fm = 0.0025, (f) fm = 0.003. . . . 104 A.l Modèle de transmission avec interférence entre symboles 113 B.l Egaliseur annuleur d'interférences (AI) 115 B.2 Représentation de l'erreur {efc} pour l'égaliseur annuleur d'interférences. 117
2.1 Coefficients du canal A de Proakis 9 2.2 Coefficients du canal B de Proakis. . 9 2.3 Coefficients du canal C de Proakis. . 11 2.4 Paramètres des égaliseurs DFE.LMS et MLSE (estimateur RLS). . . . 28 3.1 Les paramètres optimaux des égaliseurs DD.DFE.LMS 43 3.2 Paramètres des égaliseurs DD.DFE.LMS 44 3.3 Paramètres de l'égaliseur DFE.LMS entraîné 44 3.4 Paramètres optimaux de l'égaliseur DFE.CMA pour un SNR = 15 dB,
canal A de Proakis 47 3.5 Paramètres de l'égaliseur DFE.CMA 49 3.6 Paramètres optimaux de l'égaliseur DFE.SATO pour un SNR = 15 dB,
canal A de Proakis 52 3.7 Paramètres de l'égaliseur DFE.SATO 54 3.8 Complexité calculatoire des égaliseurs autodidactes 57 4.1 Paramètres du turbo égaliseur proposé 74 4.2 Complexité calculatoire des turbo égaliseurs (TE) 82 5.1 Paramètres de simulation du turbo égaliseur pour les canaux variants,
AI Annuleur d'interférences « Interférences canceller (IC) »
CAG Commande automatique de gain « Automatique gain command (AGC) » CMA Algorithme à module constant « Constant modulus algorithm »
DFE Egaliseur à retour de décision « Décision feedback equalizer » DD.DFE DFE en mode de décision directe « DFE in direct décision mode » DD.LMS Algorithme LMS en mode de décision directe
« LMS algorithm in direct décision mode »
DD.RLS Algorithme RLS en mode de décision directe
« RLS algorithm in direct décision mode »
DFE.LMS DFE adapté par algorithme LMS « DFE adapted by LMS algorithm » DFE.CMA DFE adapté par algorithme CMA « DFE adapted by CMA algorithm » DFE.SATO DFE adapté par algorithme SATO « DFE adapted by SATO algorithm » EQM Erreur quadratique moyenne « Mean square error (MSE) »
EQMM Erreur quadratique moyenne minimale
« Minimum mean Square Error (MMSE) »
ISI Interférence entre symboles « Inter symbol interférence » LE Egaliseur linéaire « Linear equalizer »
LMS Moindre carré moyen « Least mean square » MAP a posteriori maximale « Maximum a posteriori » MLSE Estimation de séquence à vraisemblance maximale
« Maximum likelihood séquence estimation »
NRNSC Codeur convolutif non récursif non systématique
« Non recursive non systematic convolutional code »
RLS Moindre carré récursif « Recursive least square » RSC Codeur convolutif systématique et récursif
« Recursive systematic convolutional code »
SNR Rapport signal à bruit « Signal to noise ratio » TC Codeur turbo « Turbo code »
TD Décodeur turbo « Turbo décoder » TE Egaliseur Turbo « Turbo equalizer »
TEB Taux d'erreur binaire « Binary error rate » TES Taux d'erreur par symbole « Symbol error rate »
Variables utilisées
Bs largeur de bande du signal émis
Ds débit des symboles
efc erreur d e décision
fc fréquence porteuse
fd fréquence Doppler
fm fréquence Doppler normalisée
hn coefficient d u canal discret équivalent
h(t, T) réponse impulsionnelle d u canal
/fc symbole d'information I matrice identité
J erreur q u a d r a t i q u e moyenne
Jmin erreur q u a d r a t i q u e moyenne minimale Lc facteur de fiabilité d u canal de transmission
rik bruit blanc additif gaussien « Additive white gaussian noise » r]k bruit coloré
R rendement de codage
S (/) densité spectrale de puissance
Ts durée d'un symbole
v vitesse d u mobile
Vk échantillon du signal reçu Xk échantillon du signal transmis Xk échantillon du signal égalisé Xk échantillon du signal estimé
Dk échantillon du signal à la sortie du filtre de réception
A pas d'adaptation
a\ variance du bruit additif a2x variance du signal transmis A facteur d'oubli
Notation mathématique
E [x] espérance mathématique de la variable aléatoire x
Q[x] &[x] s s* V v' <g> partie imaginaire de x partie réelle de x scalaire scalaire conjugué vecteur vecteur transposé produit de convolution
Introduction générale
Le traitement du signal est une discipline récente qui a développé ses propres méthodes et a montré son applicabilité dans des contextes variés. Parmi ses domaines d'application privilégiés est la conception de la couche physique des systèmes de com-munications numériques. Dans ce cadre, les outils du traitement du signal sont couplés avec ceux issus de la théorie de l'information pour permettre la conception des émetteurs et mettre en place les algorithmes de réception possédant les meilleurs compromis per-formances/complexité.
Ces systèmes de communications numériques nécessitent généralement la transmis-sion de quantités importantes d'information dans des bandes de fréquence les plus étroites possibles. L'optimisation du rapport débit/largeur de bande nécessite l'utili-sation de modulations à grand nombre d'états. Ces modulations sont assez sensibles aux interférences entre symboles introduites par la sélectivité fréquentielle du canal de transmission multi trajets. Cette contrainte impose aux concepteurs des systèmes de communication de mettre en oeuvre des méthodes de traitement permettant de com-battre l'interférence entre symboles générée par ces canaux.
Il existe plusieurs techniques pour réduire les interférences entre symboles, parmi les-quelles on peut citer : les techniques de transmission multi porteuses, les techniques d'étalement de spectre, l'égalisation, etc. Ce travail de recherche étant consacré à l'égalisation et au codage de canal.
La technique d'égalisation apparaît comme une technique de traitement de l'interférence entre symboles efficace lorsque les canaux de transmission sont sélectifs en fréquence
et invariants ou variants dans le temps. Les égaliseurs les plus utilisés en pratique sont les égaliseurs adaptatifs. Ils sont les plus simples à mettre en oeuvre et peuvent être construits à partir des filtres transverses dont les coefficients sont optimisés par un al-gorithme des moindres carrés moyens (LMS) ou des moindres carrés récursifs (RLS). Pour forcer la convergence de ces algorithmes vers la solution optimale recherchée, on utilise une séquence d'apprentissage, c'est-à-dire un préambule constitué de données connues au récepteur. Il est clair que l'efficacité spectrale de ces systèmes entraînés est notablement affectée à cause de la présence de la séquence d'apprentissage.
Lorsque l'utilisation de la séquence d'apprentissage n'est pas possible, ou quand il est nécessaire d'augmenter la capacité de transmission des systèmes de communications, on doit recourir à des égaliseurs autodidactes (aveugles) qui basent leur traitement sur la connaissance a priori des propriétés statistiques des signaux émis.
Ces égaliseurs autodidactes présentent un intérêt pratique non négligeable. En effet, la suppression de la séquence d'apprentissage augmente considérablement la capacité de transmission des systèmes de communications. C'est en ce sens que les égaliseurs autodi-dactes présentent un intérêt majeur. Dans la littérature, on trouve plusieurs approches d'égalisation autodidacte. On peut citer quelques algorithmes tels que ceux de Sato [1], Godard [2], Benveniste et Goursat [3], Picchi [4], etc. La vitesse de convergence de ces types d'algorithmes dépend de la fonction de coût utilisée. Généralement, les égaliseurs autodidactes présentent des convergences lentes et des performances en régime établi nettement inférieures à celles obtenues avec les égaliseurs pilotés par séquences d'ap-prentissage. La principale raison est la difficulté à tenir compte du phénomène de pro-pagation d'erreurs durant la phase de convergence des algorithmes. Pour cette raison, plusieurs auteurs ont cherché à combiner l'égalisation et le décodage dans un système itératif afin de s'affranchir des interférences entre symboles. Ces systèmes itératifs sont nommés « turbo égaliseurs ». La première architecture du turbo égaliseur a été proposée en 1995 par Berrou [5] et dont le principe trouve ses fondements dans les turbo codes [6]. Elle associe un détecteur à maximum de vraisemblance avec un décodeur de canal. La deuxième architecture a été introduite en 1997 par Laot [7] : celle-ci est formée d'un égaliseur annuleur d'interférences et un décodeur MAP. La troisième architecture peu utilisée, met en oeuvre un égaliseur à retour de décision et un décodeur de canal : elle ne conduit pas cependant aux performances optimales [8].
1.1 Motivation et problématique
Nous nous intéressons, dans notre recherche à l'égalisation dans les canaux sélectifs en fréquence invariants et variants dans le temps. Nous traitons le cas de la transmission des symboles non codés dans un premier temps. Puis, nous étudions le cas des symboles turbo codés.
1.1.1 Canaux sélectifs en fréquence et invariants
Pour les canaux sélectifs en fréquence et invariants, il est possible de transmettre des quantités importantes des données sans que le canal de transmission change de manière significative. C'est pour cette raison que ces canaux sont considérés invariants (stationnaires) dans le temps. Pour la simulation de ces canaux invariants, on trouve plusieurs modèles dans [9, 10]. Ces modèles sont utiles pour simuler les environnements de propagation stationnaires (exemple : les canaux téléphoniques). Pour ces canaux multi trajets, le signal reçu est affecté par les interférences entre symboles, il est donc primordial d'égaliser les signaux issus de ces canaux.
Dans le cadre de notre recherche, nous traitons l'égalisation dans les canaux invariants dans le cas de la modulation d'amplitude en quadrature à quatre signaux (4QAM) et non codés. Ensuite nous traitons le cas de la modulation par déplacement de phase linéaire (BPSK) et turbo codée. Pour chaque cas, nous cherchons à proposer et évaluer une architecture aveugle qui permette de réduire les interférences entre symboles de ces canaux sans l'utilisation de la séquence d'apprentissage.
Nos approches d'égalisation dans les canaux invariants et sélectifs en fréquence sont inspirées des travaux effectués par : Laot [11, 12], Xiang [13] et Kim [14].
1.1.2 Canaux sélectifs en fréquence et variants dans le temps
Pour les canaux sélectifs en fréquence et variants dans le temps, les délais de propa-gation sont très importants, la vitesse de transmission est affectée et réduite à cause de l'effet produit par les obstacles des milieux de propagation. Un autre facteur important
pour ces canaux est la vitesse de déplacement de l'émetteur ou du récepteur qui cause les changements rapides du canal de transmission.
Dans le cadre de notre travail de recherche, nous nous intéressons plus particulièrement aux canaux de Rayleigh corrélés et sélectifs en fréquence et aux symboles turbo codés. Nous cherchons à proposer une architecture de turbo égaliseur qui permette de te-nir compte de la sélectivité temporelle et fréquentielle du canal de Rayleigh avec une réduction de la longueur de la séquence d'apprentissage. Notre approche d'égalisation est inspirée des travaux effectués par : Huynh et Fortier [15], Ammari [16], Kim [14] et Laot [11].
1.2 Contributions de notre recherche
En utilisant les principes de l'égalisation entraînée, de l'égalisation autodidactes et de la turbo égalisation, nous avons proposé quelques modifications pour combattre l'effet des interférences entre symboles dû à la sélectivité des canaux de transmissions. Pour l'égalisation des symboles non codés dans les canaux sélectifs en fréquence et invariants, les contributions originales de notre travail de recherche sont :
- la proposition et l'évaluation des performances d'une architecture autodidacte (bidirectionnelle) pour trois types de configurations.
Pour l'égalisation des symboles turbo codés dans les canaux invariants et sélectifs en fréquence, les contributions originales de notre travail de recherche sont :
- la modification de l'architecture de l'égaliseur annuleur d'interférences,
- la proposition d'une procédure aveugle pour l'initialisation du turbo égaliseur, et - l'évaluation des performances du turbo égaliseur avec l'architecture de l'égaliseur
annuleur d'interférence modifiée dans les modèles de Proakis [10].
Pour la turbo égalisation des symboles turbo codés dans les canaux variants dans le temps et sélectifs en fréquence, les contributions originales de notre travail de recherche sont :
- la modification de l'architecture de l'égaliseur annuleur d'interférences, - la proposition d'une procédure pour initialiser le turbo égaliseur, et
- l'évaluation des performances du turbo égaliseur dans les canaux de Rayleigh corrélés et sélectifs en fréquence.
1.3 Plan du mémoire
Ce mémoire comporte une introduction générale, quatre chapitres et une conclusion générale. Le présent chapitre consiste en une introduction décrivant le cadre général de notre recherche.
Le deuxième chapitre est une revue de littérature qui introduit la définition du ca-nal de transmission. Nous présentons les techniques statistiques permettant l'étude et la simulation du canal radio mobile, ainsi que les techniques de codage et décodage itératif des codes turbo. Nous exposons brièvement, les structures de : l'égaliseur linéaire (LE), l'égaliseur à retour de décision (DFE), l'égaliseur annuleur d'interférences (AI) et l'égaliseur basé sur une structure en treillis. Nous donnons aussi un aperçu sur les algo-rithmes d'égalisation entraînée (avec séquence d'apprentissage) LMS et RLS. Nous ver-rons aussi qu'il existe des algorithmes autodidactes utilisés pour suspendre la séquence d'apprentissage afin d'augmenter la capacité de transmission des systèmes de commu-nication.
Au chapitre 3, nous proposons une nouvelle architecture pour l'égalisation autodidacte. Nous évaluons les performances de cette architecture pour trois configurations et pour une modulation 4QAM non codée. Pour générer les interférences entre symboles, nous utilisons les modèles des canaux présentés par Proakis [10].
Au chapitre 4, nous présentons l'état de l'art en turbo égalisation. Nous exposons les différentes architectures des turbos égaliseurs utilisés pour combattre l'effet des in-terférences entre symboles générés par la sélectivité des canaux invariants. Nous propo-sons et analypropo-sons par la suite, une architecture du turbo égaliseur utilisant l'annuleur d'interférences. Nous proposons certaines modifications dans un souci d'améliorer le taux d'erreur binaire.
Le cinquième chapitre, concerne l'égalisation des canaux de Rayleigh corrélés et sélectifs en fréquence. Nous apportons quelques modifications au modèle de la turbo égalisation des canaux invariants de point de vue structure et algorithme afin de tenir compte de la sélectivité temporelle du canal de Rayleigh.
Enfin, le dernier chapitre est une conclusion générale qui présente une synthèse des travaux de recherche élaborés dans ce mémoire, récapitule les contributions apportées et propose des suggestions pour des travaux de recherche futurs.
Revue de la littérature
2.1 Introduction
L'objectif des systèmes de réception pour les transmissions numériques est de re-constituer le signal émis qui a été perturbé par le canal de transmission. Donc il est nécessaire de connaître la nature des perturbations qu'il a subi afin de dimensionner les fonctions élémentaires de l'émetteur et du récepteur.
Dans la deuxième section de ce chapitre, nous introduisons le modèle du canal discret équivalent à bruit blanc et nous présentons quelques modèles discrets des canaux inva-riants et sélectifs en fréquence. A la troisième section, nous présentons les techniques statistiques et la méthode de simulation du canal radio mobile. Dans la quatrième sec-tion, nous donnons un aperçu sur les codes turbo et leur décodage itératif.
Dans les sections 2.5, 2.6 et 2.7, nous présentons les principales structures d'égaliseurs utilisés en pratique pour lutter contre la sélectivité fréquentielle des canaux de trans-missions et nous donnons un aperçu sur les algorithmes d'égalisation entraînée LMS et RLS. A la dernière section, nous verrons qu'il existe plusieurs approches d'égalisation autodidacte (aveugle) qui basent leur traitement sur les statistiques des signaux émis.
2.2 Modèle en temps discret du canal AWGN avec
l'interférence entre symboles
Filtre de
X2 transmission
C(t)
* i
FlG. 2.1 - Chaîne de communication pour un canal AWGN avec interférence entre symboles.
La chaîne de communication numérique de la figure 2.1 est constituée d'un émetteur, d'un canal de transmission et d'un récepteur. Le signal reçu v(t) est donné par [10] :
v{t) = - nT) + n(t) (2.1)
n = 0
où xn représente l'échantillon du signal à transmettre, n(t) est le bruit blanc additif
gaussien et h(t) la réponse impulsionnelle du canal, contenant c(t) : f+OO
/•+OO
h{t) = c(t) ® f{t) - / c(r)f(t - r)d (2.2)
Le signal reçu passe à travers le filtre de réception, et est ensuite échantillonné à une cadence de 1/T échantillons/s. Le signal à la sortie du filtre de réception est :
(2.3)
n = 0
où q(t) est la réponse impulsionnelle du filtre de réception, contenant h(t), et rj(t) est bruit coloré. Le signal échantillonné y^ est donné par :
(2.4)
n = 0
où Çfc et rjk sont respectivement les versions échantillonnées de q(t) et r](t).
Puisque l'émetteur transmet des symboles discrets dans le temps à une vitesse de 1/T symboles/s et que les échantillons du signal reçu à la sortie du filtre de réception sont aussi échantillonnés à 1/T symboles/s, il est donc pratique de représenter la cascade
des filtres : de l'émetteur, du canal, du récepteur et de l'échantillonneur, par un filtre discret équivalent gk. Dans cette situation, le signal échantillonné yk s'exprime [8] :
yk = Y] xngk-n + nk (2.5)
II est donc possible de trouver les données xn en utilisant un traitement approprié
d'égalisation ou de détection. Toutefois, la séquence de bruit {r]k} est colorée ce qui n'en
facilite pas l'analyse théorique. Il est donc désirable de blanchir la séquence {77/J par un autre filtrage de la séquence {yk}. Utilisant la transformée en z, le filtre blanchisseur
est réalisé par H*(l/z*) tel que :
= H(z)H*(l/z*) (2.6)
Nous choisissons pour H (z) les L racines de G (z) situées à l'intérieur du cercle unitaire.
H (z) est donc un filtre à phase minimale et H* (1/z*) est un filtre à phase maximale.
La sortie du canal s'exprime alors sous la forme :
nk (2.7)
n=0
Ce modèle est appelé « canal discret équivalent à bruit blanc » . Avec ce modèle, la
mise en oeuvre des égaliseurs est plus facile car l'égaliseur approprié devra reproduire l'inverse de la réponse du canal H (z). Si la dispersion du canal est finie, on obtient :
Vk = (2.8)
n=0
Le modèle du canal discret équivalent à bruit blanc est donné à la figure 2.2.
FlG. 2.2 - Modèle discret équivalent de l'interférence entre symboles dans un canal
Exemples illustratifs des canaux discrets de Proakis
Pendant les années 1970 et 1990, la recherche en égalisation vise à égaliser des canaux téléphoniques dispersifs. Une fois discrétisés, ces canaux admettent un modèle mathématique semblable aux canaux sans fil. C'est une des raisons pour lesquelles de nombreux chercheurs dans le domaine de l'égalisation utilisent les modèles de canaux proposés par Proakis dans la comparaison des performances des égaliseurs, Proakis étant l'un des précurseurs les plus connus du domaine de communication numérique. Pour illustrer le comportement des égaliseurs que nous proposons, nous utilisons également ces modèles de canaux dans le contexte stationnaire.
Canal A de Proakis Les coefficients du canal A de Proakis sont donnés au tableau
2.1 et ses caractéristiques sont illustrées à la figure 2.3. Il possède dix zéros dont cinq sont à l'intérieur du cercle unité et cinq sont à l'extérieur. La réponse en amplitude de ce canal présente un évanouissement de profondeur moyenne et sa réponse en phase est presque linéaire. Ce canal peut être utilisé comme un modèle pour les canaux téléphoniques.
TAB, 2.1 - Coefficients du canal A de Proakis.
h0 0.04 hi -0.05 h2 0.07 h3 -0.21 hA -0.5 h5 0.72 h6 0.36 h7 0 h8 0.21 hg 0.03 h io 0.07
Canal B de Proakis Les coefficients du canal B de Proakis sont donnés au tableau
2.2 et ses caractéristiques sont illustrées à la figure 2.4. Il possède deux zéros, dont l'un est à l'intérieur du cercle unité et l'autre est à l'extérieur. La réponse en amplitude de ce canal présente un évanouissement très profond et sa réponse en phase est quasi linéaire. Ce canal résulte des interférences entre symboles sévères.
TAB. 2.2 - Coefficients du canal B de Proakis.
h0 0.407 h1 0.815 h2 0.407
0.4 0.6 Fréquence normalisée (b) Partie réelle 0.4 0.6 Fréquence normalisée 0.8
FlG. 2.3 -- Caractéristiques du canal A de Proakis. a) Réponse en amplitude, b) Réponse en phase, c) Les zéros de canal.
0.2 0.4 0.6 Fréquence normalisée (b) 0.8 c: BBLU I Parti e 2 1 0 - 1 o (c) - 2 0 Partie réelle 0.2 0.4 0.6 Fréquence normalisée 0.8
FlG. 2.4 - Caractéristiques du canal B de Proakis. a) Réponse en amplitude, b) Réponse en phase, c) Les zéros de canal.
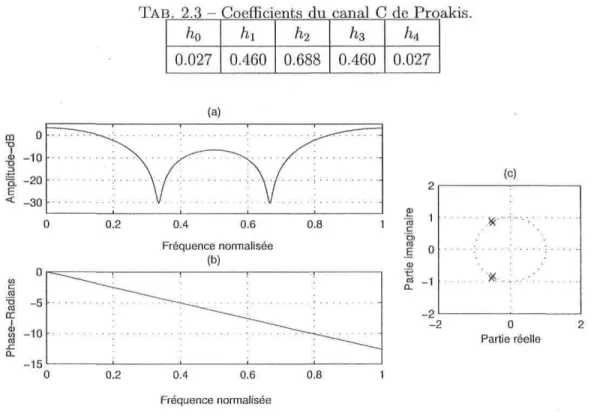
Canal C de Proakis Les coefficients du canal C de Proakis sont donnés au tableau
2.3 et ses caractéristiques sont illustrées à la figure 2.5. Il possède quatre zéros, dont deux sont à l'intérieur du cercle unité et deux sont à l'extérieur. La réponse en amplitude de ce canal présente un évanouissement très profond et sa réponse en phase est quasi linéaire. Ce canal résulte des interférences entre symboles très sévères.
TAB. 2.3 - Coefficients du canal C de Proakis.
h0 0.027 0.460 0.688 0.460 0.027 -15 0.2 0.4 0.6 0.8 Fréquence normalisée (b) 0.4 0.6 Fréquence normalisée 0.8 ar e c ( >) im a u> rt i oï n. 2 1 0 -1 _o (c) ;.*••"! •••••: -2 0 Partie réelle
FlG. 2.5 - Caractéristiques du canal C de Proakis. a) Réponse en amplitude, b) Réponse en phase, c) Les zéros de canal.
2.3 Caractérisât ion du canal radio mobile
Les milieux de propagation des systèmes radio de communications mobiles en-gendrent des variations de la puissance du signal émis. Ces variations sont causées par la présence des obstacles dans les milieux de propagation et du phénomène des trajets multiples. Il y a trois phénomènes principaux qui influencent la propagation du signal des systèmes de communications mobiles : la réflexion, la diffraction et la dispersion du
signal. Il y a aussi la vitesse de déplacement des utilisateurs qui cause une dégradation des signaux émis.
On suppose que l'antenne est en déplacement : il y a donc de multiples trajets et chaque trajet est associé à une propagation de délai rn{t) et un facteur multiplicateur de
puis-sance an(t). Si on néglige le bruit, le signal reçu en bande passante s'exprime par [17] :
v(t) = ]T an(t)e-^^^x(t - rn(t)) (2.9)
n
où x(t) représente le signal transmis et fc est la fréquence porteuse.
Puisque v(t) est la réponse du filtre de canal à un signal x(t) on peut en conclure que :
h(t,r) = £>n(t)e-j2ir/<!r"(t)<ï(* - rn(t)) (2.10)
On peut écrire aussi :
h(t,r) ^ ^ û n ^ e - ^ ' ^ t - rn(t)) (2.11)
où ôn(t) représente la phase du chemin d'indice n. Les fonctions de distribution de
probabilité des variables aléatoires an (t), 6n (t) et rn (t) dépendent des caractéristiques
des milieux de propagation. Généralement, la variable an (t), dite enveloppe du signal
reçu, suit une distribution de Rayleigh, de Rice, de Nakagami, lognormale ou une com-binaison de ces lois probabilistes. La phase 9n (t) est souvent considérée uniformément
distribuée sur l'intervalle [0, 2n) et le délai rn (t) est approximé par un processus de
Poisson.
2.3.1 Fonction d'autocorrélation et densité spectrale de puis-sance du canal radio mobile
On suppose que la réponse impulsionnelle du canal radio mobile h(t,r) est station-naire au sens large (WSS). Cette hypothèse, nous permet de définir certaines statistiques pour caractériser les variations du canal radio mobile.
La fonction d'autocorrélation temps-retard de propagation est définie par [10] :
Le canal étant supposé stationnaire au sens large, t\ = t et t<i = t + At, et l'équation (2.12) s'exprime :
Rh{Tl,r2;At) - ^E[h*{n-t)h{T2;t + At)] (2.13) Dans la plupart des systèmes radio de transmission, l'atténuation et le déphasage du canal associé au trajet de délais T\ sont non corrélés avec l'atténuation et le déphasage du canal associé au trajet de délais ri- Donc l'équation (2.13) est équivalente à :
Rh(n; At)5(T! - r2) = l-E [h*(n; t)h(r2; t + At)} (2.14) Si At = 0, nous avons .ft/^rjO) = Rhij) est tout simplement la puissance moyenne en sortie du canal en fonction du délai r et Rh{r) est appelé profil de puissance multivoies. La gamme des valeurs de r pour lesquelles Rh{,r) ^ 0 est appelée valeur efficace de la réponse impulsionnelle du canal et est notée rmax. On définit la largeur de bande de
cohérence du canal par :
(A/)c = J - (2.15)
<max
Une autre caractérisation du canal radio mobile multi trajets peut être obtenue dans le domaine fréquentiel. Si on fait la transformée de Fourier de h(r; t) on obtient la fonction de transfert H(f;t) :
roo
H(f-t)= h(T]t)e~j2*lTdT (2.16) J — oo
Sous l'hypothèse que le canal est stationnaire au sens large, on définit la fonction d'au-tocorrélation temps-fréquence de propagation par [10] :
Rh(fu j2- A(t)) - i / ^ JZ E [H*{n; t)H{h-1 + At)} e^^-^drxdr2 - r2)e^^-hr,)dTldT2 (2,17)
Posons A / = /2 — / i l'équation (2.17) s'exprime :
(2.18) La fonction d'autocorrélation temps-fréquence de propagation peut être mesurée en pra-tique par la transmission de deux signaux sinusoïdaux espacés de A / , et à la réception on réalise l'intercorrélation des signaux reçus avec un délai At.
On définit la transformée de Fourier de la fonction d'autocorrélation temps-fréquence de propagation Rh(Af; At) par :
Sh(Af;\d)= Rh(Af;\d)e-^AtdAt (2.19)
Si:
A / = 0 => Sfc(A/; Ad) = Sh(Ad) (2.20)
Sh(Xd) représente la densité spectrale de puissance du spectre Doppler de canal : elle
caractérise l'élargissement Doppler. La gamme des valeurs Xd pour lesquelles Sh{Xd) ^ 0 est appelée spectre Doppler du canal, dénotée Bd- À partir du paramètre Bd, on définit le temps de cohérence du canal par :
( A t )c» i - (2.21)
Od
Le temps de cohérence caractérise l'évolution temporelle du canal et représente la durée pour laquelle le canal est considéré invariant.
2.3.2 Sélectivité fréquentielle
Le canal est modélisé par un filtre de réponse en fréquence H (/) tel que H (/) = 0 pour / > W. Un canal est dit sélectif en fréquence vis-à-vis un signal occupant une bande Bs « ^ (Ta est la durée d'un symbole) si sa largeur de bande de cohérence (A/)c
est inférieure à la largeur de bande Bs du signal :
(A/)c < Bs (2.22)
Dans le cas contraire où (A/)c >> Ba, le canal est dit non sélectif en fréquence.
Plus le débit des symboles Ds = ^- du signal transmis est élevé, plus le canal est sélectif
en fréquence pour ce signal.
2.3.3 Sélectivité temporelle
L'effet Doppler est quantifié par la largeur de bande Doppler, ou dispersion Doppler
Bd- On considère que le canal est invariant sur une durée T si le temps de cohérence
du canal est supérieur à la durée T :
(At)c » T (2.23)
2.3.4 Modèle du canal de Rayleigh
A cause de l'effet Doppler, la fréquence du signal transmis subit un décalage qui dépend de la vitesse v du mobile (en m/s), de la longueur d'onde Ao = c/fc et de l'angle d'incidence 8n de l'onde par rapport à la direction du déplacement de mobile. Le décalage Doppler de l'onde d'indice n est donnée par : fn = v/\0cos6n.
Le champ électrique reçu est donné par :
E(t) = E\t) COS(2TTfct) - EQ(t) sin(27r/ct) (2.24) E1 est la composante en phase et E® est la composante en quadrature.
E\t) = Eo E L i Cn COS{2TT fnt + 4>n) E® (t) = Eo E L i Cn sm(27rfnt + <f>n)
où Cn est l'amplitude du champ transmis supposée constante, fn et <fin sont respective-ment, le décalage Doppler et la phase d'onde d'indice n, et L est le nombre de trajets suivis par l'onde. Selon le théorème de limite centrale, si L est suffisamment grand, les 'composantes Er(t) et E®(t) sont des variables aléatoires gaussiennes indépendantes.
Si les deux amplitudes sont gaussiennes, de moyennes nulles et de même variance. L'en-veloppe du signal reçu peut être calculée à partir de ces deux amplitudes.
r(t) = \EZ\ = ^(E'(t)Y + (EQ(t)Y. (2.26)
Puisque les deux amplitudes sont gaussiennes, l'enveloppe r (t) suit une loi de Rayleigh et sa densité de probabilité est donnée par :
fr(r) = ~exp(-~) (2.27)
La fonction de distribution de probabilité des coefficients hk(t) est donnée par [16] :
/ x i (
h (hk (t)) = fh, (h{) fhQ (h?) - ^ â exp (2-28)
Clarke a démontré que la densité spectrale de puissance du signal reçu est [18] : (1/ " /cl < h)
S(f)={ 4*fd V i - C f / - / . ) / / , )2 VU JCl~Ja/ (2.29)
Simulation du canal de Rayleigh
La méthode la plus utilisée pour générer le canal de Rayleigh est celle proposée en 1968 par Clarke [18]. Elle consiste à générer deux processus gaussiens indépendants et identiquement distribués (i.i.d) et de les filtrer par deux filtres passe-bas identiques de réponse fréquentielle H (/) = \JS (/) afin d'obtenir des signaux corrélés. La sortie de chaque filtre est injectée, ensuite, dans un module de transformée inverse de Fourier rapide (IFFT). La sortie du canal est alors obtenue en prenant la somme de deux signaux à la sortie des modules (IFFT). En 1975, Smith [19] a proposé-un programme en FORTRAN pour simuler le canal de Rayleigh corrélé. En 2000, Beaulieu [20], suggère de sommer les signaux à la sortie du filtre passe bas avant d'appliquer la IFFT. La méthode de Beaulieu consiste à générer deux processus gaussiens (i.i.d) de JV composantes et de les faire passer à travers le filtre Doppler. Une fois les deux composantes filtrées, les composantes en phase et en quadrature sont additionnées et le résultat est injecté dans un module IFFT. La sortie du canal est obtenue à la sortie du module IFFT. Dans le cadre de notre recherche, nous utilisons la méthode de Beaulieu, celle-ci nécessite moins d'opérations IFFT.
2.4 Codage de canal
Le but des communications numériques est de transmettre des données binaires de façon fiable sur un canal bruité. Dans une chaîne de communication, le codeur de canal joue un rôle très important. C'est l'élément principal permettant de combattre les er-reurs de transmissions résultant des perturbations du canal, ou en d'autres termes, d'as-surer un TEB (taux d'erreurs binaire) faible sous la contrainte de puissance d'émission. Le principe de codage de canal consiste à insérer parmi les éléments d'information, des données supplémentaires suivant une structure connue afin de pouvoir en réception, détecter ou corriger les éventuelles erreurs. Il existe plusieurs types de codes correcteurs. Dans [21, 22], on trouve les différentes classes des codes correcteurs en détail.
Dans le cadre de notre recherche, nous nous intéressons plus particulièrement aux codes turbo et leur décodage itératif.
2.4.1 Les codeurs turbo
Depuis les travaux de C. Shannon, la limite théorique de la capacité de correction des codes correcteurs d'erreurs est connue. Pendant 50 ans, et jusqu'aux années 1990, cette limite est restée inaccessible. En effet, l'invention des codes turbo par C. Berrou et A. Glavieux [6] a enfin permis de disposer de codes de complexité raisonnable ayant des performances très proches de la limite de Shannon. Le terme turbo vient de la notion de bouclage semblable à celle utilisée dans les moteurs turbo. L'idée est d'utiliser plusieurs séquences redondantes d'un même message. L'originalité du codeur turbo est d'effectuer une opération d'entrelacement (permutation) sur les données avant de les traiter par le deuxième codeur, si bien que les erreurs qui ne sont pas corrigées par le premier codeur ne seront en général pas identiques aux erreurs non corrigées par le deuxième codeur. La séquence d'information {csk = h} est entièrement transmise comme étant la séquence
systématique. Deux autres versions de la séquence d'information sont transmises après codage, la première version codée sans entrelacement {c^1}, la deuxième version codée
après entrelacement {c^2}. Le rendement R global du codeur turbo vérifiera la relation
suivante :
iï = -k
+
i-
1 (230
»
Ri et R2 sont respectivement les rendements des codeurs Cl et C2.
h
Codeur ClCodeur C2
k2ln2
FlG. 2.6 - Architecture d'un codeur turbo.
Le codeur En pratique, on prend souvent les deux codeurs identiques. De plus
les codes constituant le code turbo sont toujours des codes convolutifs récursifs et systématiques (RSC). Les codes turbo parallèles utilisant les codes convolutifs non
systématiques et non récursifs (NRNSC) ne présentent pas de gain d'entrelacement. Le choix des codes convolutifs récursifs nécessite certaines précautions car il existe des codeurs RSCs qui ne présentent pas de bonnes performances pour être utilisés dans les structures des codes turbo.
Poinçonnage II est possible de réduire la quantité des données transmises par
poinç-onnage de manière à optimiser la redondance et à l'adapter à la probabilité d'erreur caractérisant la ligne de transmission. Au décodage, les bits perforés sont remplacés par des zéros.
L'entrelacement L'entrelacement est nécessaire lors du transfert des bits d'un co-deur (ou décoco-deur) vers le suivant. Tout le principe des codes turbo est basé sur cette notion. L'entrelacement consiste à permuter les données émises. Plusieurs méthodes de permutation sont possibles. Le choix de la structure de l'entrelaceur est un facteur clé qui détermine les performances d'un code turbo.
2.4.2 Décodage itératif des codes turbo
II existe deux types d'algorithmes principaux qui peuvent être appliqués au décodage itératif des codes turbo. Le premier algorithme est celui de Viterbi, il a été introduit en 1967 pour le décodage des codes convolutifs [23], il détermine la séquence codée {c^} la plus vraisemblable transmise à partir de la séquence reçue
{vk}-Le deuxième est l'algorithme MAP : il permet de maximiser la probabilité de décodage correct du bit émis par la source d'information. L'algorithme MAP proposé en 1974 par Bahl, Cocke, Jelinek et Raviv [24] a été conçu pour le décodage des codes linéaires. Il est connu sous le nom MAP-BCJR ou algorithme aller-retour. La complexité est légèrement supérieure à l'algorithme de Viterbi, mais donne des meilleurs résultats. L'opération de décodage des codes turbo est itérative : on utilise l'entrée estimée par le deuxième décodeur pour améliorer le résultat de l'estimation du premier codeur (au sens de maximum de vraisemblance a posteriori), puis le résultat de ce nouveau décodage est utilisé pour améliorer le décodage par le deuxième décodeur et ainsi de suite. Cette
combinaison donne des résultats remarquablement efficaces. Toutefois la quantité de calculs à effectuer est importante. La figure 2.7 donne le schéma du décodeur turbo.
FlG. 2.7 - Schéma du décodeur turbo.
Le décodeur turbo se décompose en deux modules identiques, DEC1 et DEC2 associés respectivement aux codeurs Cl et C2. A la réception, la séquence reçue est démultiplexée et chaque élément v\ est envoyé au décodeur correspondant. Disposant des symboles systématiques vsk et de ceux de parité vpkl et vpk , chaque décodeur tente de calculer
les valeurs de vraisemblance de bit Ik. Pour ce faire, les deux décodeurs s'échangent de l'information souple par un processus itératif qui prend fin quand on obtient les performances requises. La valeur de vraisemblance à la sortie du décodeur peut s'écrire comme la somme de trois termes :
A (Ik) = Lcvsk + Aa (/fe) + Ae (2.31)
A" (Jfc) représente le rapport de vraisemblance de l'information a priori, Lc est le
fac-teur de fiabilité du canal de transmission et le terme Ae (/&) est appelé information
extrinsèque du décodeur. Cette information extrinsèque induite sera fournie à l'autre décodeur et lui servira comme information a priori. Lors de la première itération, le décodeur DEC1 ne dispose pas d'information sur le bit émis. Il considère a priori que les symboles 1 et 0 sont équiprobables et prend le rapport de vraisemblance Aa (Ik) = 0.
On peut constater sur le schéma de la figure 2.7 que l'information extrinsèque d'un décodeur à entrée et sortie souples (SISO) est obtenue par la différence entre la valeur à sa sortie et celle à son entrée.
Ae(Ik) = h(h)-Lcvsk-Aa(Ik) (2.32) En tenant compte de la permutation engendrée par l'entrelaceur entre les deux décodeurs
La valeur de vraisemblance à la sortie de chaque décodeur s'exprime comme suit : A1 (Ik) = Lcvi + A| (Ik) + Af (Ik)
A2(h) = Lcvsk + Ai(Ik) + Ae2(Ik)
Ces deux équations résument le principe du décodage itératif des codes turbo. Après un nombre prédéfini d'itérations (en général), le décodeur turbo estime le bit Ik en prenant le signe du rapport de vraisemblance à la sortie du décodeur DEC2.
2.5 Principales structures d'égaliseurs
La fonction principale des égaliseurs est d'inverser la réponse impulsionnelle estimée du canal de transmission sélectif en fréquence. Les architectures des égaliseurs employées en pratique sont nombreuses, on peut citer :
- une première technique appelée détection suivant la séquence la plus vraisem-blable « Maximum likelihood séquence estimation (MLSE) » qui donne d'excel-lents résultats sous réserve que le canal soit connu ou bien estimé,
- les égaliseurs linéaires « Linear Equalizer (LE) » : les performances de ces égaliseurs dégradent remarquablement lorsque les conditions de propagation se dégradent, et
- les égaliseurs à retour de décision « Décision feedback equalizer (DFE) » : em-ployés pour les canaux sévèrement dégradés.
Pour l'optimisation des coefficients d'égaliseurs, il existe essentiellement deux critères : - le premier critère consiste à forcer la réponse impulsionnelle du couple canal/ égaliseur à zéro sauf à t = 0 : cette approche d'égalisation est appelée forçage à zéro « Zéro forcing (ZF) » . Elle est extrêmement sensible au bruit.
- Le deuxième critère consiste à adapter les coefficients de l'égaliseur par la rninimi-sation de l'erreur quadratique moyenne entre la séquence égalisée et la séquence es-timée. Cette approche est appelée erreur quadratique moyenne minimale (EQMM)
« Minimum mean Square Error (MMSE) » .
Dans cette section, nous présentons brièvement les structures d'égaliseurs : l'égaliseur linéaire (LE), l'égaliseur à retour de décision (DFE), l'égaliseur annuleur d'interférence (AI) et l'égaliseur basé sur une structure en treillis.
2.5.1 Égaliseur linéaire (LE)
L'égaliseurs linéaire est le plus simple à mettre en oeuvre. En effet, il s'agit tout simplement d'utiliser un filtre numérique à réponse impulsionnelle finie, pour lequel les méthodes de calcul et d'implantation sont bien connues. La figure 2.8, illustre le principe de l'égaliseur linéaire. Pour l'optimisation des coefficients de l'égaliseur, nous adoptons le critère de minimisation de l'erreur quadratique moyenne entre la séquence d'entrée et la séquence estimée à la sortie de l'égaliseur. Cette erreur est donnée par :
L'erreur quadratique moyenne (EQM) s'exprime par :
J = E [\ek\2] (2.36) Le signal à la sortie de l'égaliseur LE est donné par :
xk= Y^ CjVk-j (2.37)
J— — OQ
H(z)
Canal Égaliseur
FlG. 2.8 - Egaliseur linéaire (LE).
L'erreur quadratique moyenne minimale de l'égaliseur linéaire est donnée par [12] :
/
1/2T 2 2
ô (II I Z.oo
iT2 I H ( f) I A- rfî
où a\ et o\ sont respectivement les variances des données {xk} et du bruit {nk
}-2.5.2 Égaliseur à retour de décision (DFE)
L'égaliseur à retour de décision (DFE) est constitué de deux filtres transverses : un filtre direct C (z) et un filtre de retour Q (z) (récursif). L'entrée du filtre direct
est la séquence reçue {vk} et l'entrée du filtre de retour est la séquence de symboles estimés {xk}- Le filtre direct est tout simplement un filtre linéaire tel que mentionné précédemment et le filtre de retour est utilisé pour éliminer l'interférence entre symboles de l'estimation courante causée par l'estimation précédente. On note ici que le filtre de retour est strictement causal. Le schéma de principe de l'égaliseur à retour de décision est donné à la figure 2.9.
rj / _ \ Canal
*(ï
\n M Vkl y—* C(z) - ^ + Filtre directJ
O(2) Donnée de sortie Filtre de retourFlG. 2.9 - Egaliseur à retour de décision (DFE).
A partir de la définition de l'égaliseur DFE, sa sortie s'exprime comme suit :
0 oo
(2.39)
j=-oo
L'erreur quadratique moyenne minimale de l'égaliseur DFE s'exprime par [12] :
>min,DFE —
9 9 9 9
(2.40)
où a est le gain du canal donné par la relation (A.8) :
' - V 2 T k=0
Rgg (0) et S\ sont donnés respectivement par les relations (A.9) et (A. 11) :
(2.41)
Rga{0) = T$_[J2T\GxU)\df Sx = exp (T f!{%T In {al \H (/)|2 + a*) df
(2.42)
2.5.3 Egaliseur annuleur d'interférences (AI)
L'égaliseur annuleur d'interférences (AI) est relativement très peu utilisé [16, 12] jusqu'à maintenant en égalisation. La structure de l'annuleur d'interférences est donnée
à la figure 2.10, il est formé d'un filtre C (z) adapté à la réponse en fréquence du canal et d'un filtre W (z) permettant la reconstitution de l'interférence entre symboles présente à la sortie du filtre adapté (on note ici que le coefficient central du filtre W (z) est nul,
Canal
FlG. 2.10 - Egaliseur annuleur d'interférences (AI). A partir de la définition de l'égaliseur AI, la sortie îk s'exprime :
(2.43)
où {xk} est la séquence des symboles estimés. Les expressions optimales des filtres de l'égaliseur annuleur d'interférences sont données par (voir annexe B) :
COpt (/) = -H* (/) (2.44) Wopt(f) = ~H(f)H*(f) 1
« I
avec (3=+
L'erreur quadratique moyenne minimale de l'Ai est donnée par (voir annexe B) :
2 2 "min,AI ô ! ô" aai + ai, (2.45) (2.46) (2.47)
On suppose que Xk = Xk, ce qui nous conduit à la solution optimale sans contrainte. Dans ce cas, l'expression de la sortie égalisée est donnée par :
1 V- 1
k + a
h>
lnUk+n
\
D'après l'équation (2.48), les interférences entre symboles sont totalement supprimées sans amplification du bruit.
2.5.4 Egaliseur basé sur une structure en treillis
Si nous regardons les figures 2.11(a) et 2.11(b) de près, nous constatons facilement que le modèle discret équivalent du canal peut être vu comme un codeur convolutif de rendement R = 1/1. Pour un alphabet bipolaire {+1,-1}, un canal de longueur
L + 1 peut être représenté par un diagramme d'états composé de 2L états et l'évolution
de transmission des symboles à travers le canal, peut être représentée sur un treillis. Donc, si le canal est parfaitement estimé (ou connu), on peut appliquer l'algorithme d'estimation de séquence à vraisemblance maximale (MLSE) ou l'algorithme a posteriori maximale (MAP) pour estimer les symboles transmis.
(a)
FlG. 2.11 - a) Modèle d'un canal discret équivalent (L = 2). b) Codeur convolutif de rendement R= 1/2.
Exemple : La figure 2.12(a) montre le modèle discret équivalent du canal B de Proakis et la figure 2.12(b) représente son diagramme d'états.
2.6 Algorithmes d'égalisation entraînée
A la section précédente, nous avons défini plusieurs structures d'égalisation linéaires et non linéaires sans présenter les méthodes de calcul des coefficients d'égaliseurs. Dans cette section, nous présentons les algorithmes adaptatifs qui assurent l'ajustement auto-matique des coefficients d'égaliseurs par minimisation de l'erreur quadratique moyenne. Il existe deux grandes familles d'algorithmes d'adaptation : l'algorithme des moindres carrés moyens (LMS) et l'algorithme des moindres carrés récursifs (RLS). Le premier algorithme est largement utilisé pour sa simplicité de mise en oeuvre et pour sa stabilité numérique. Le deuxième algorithme est connu par sa rapidité de convergence. Ces deux algorithmes d'adaptation sont commandés par une prédiction d'erreur. Cette erreur est déterminée par la comparaison de la sortie de l'égaliseur xk avec la valeur désirée xk à chaque itération de l'algorithme. Cette erreur est donnée par :
ek = xk - xk (2.49)
Le symbole désiré, xk doit être connu au récepteur. Malheureusement, dans les si-tuations pratiques, la séquence émise {xk} est inconnue (c'est ce qu'on cherche à
ob-tenir). Pour cette raison, ces algorithmes d'adaptation utilisent une séquence d'ap-prentissage (séquence de données de durée limitée connue au récepteur) pour favori-ser la convergence. La période durant laquelle l'algorithme utilise les symboles de la séquence d'apprentissage s'appelle période d'apprentissage. Après cette période d'ap-prentissage, l'égaliseur passe à la période adaptation, et est supposé correctement adapté précédemment. Durant la période d'adaptation, les données décidées présentent un taux d'erreurs faible si la période d'apprentissage était suffisante pour la convergence des co-efficients vers la solution optimale recherchée.
2.6.1 Algorithme LMS
L'algorithme LMS est une procédure itérative d'ajustement du vecteur des coeffi-cients d'égaliseur. La mise à jour des coefficoeffi-cients est basée sur une fonction de coût : cette fonction de coût dépend de la sortie de l'égaliseur. Chaque vecteur de coefficients d'égaliseur est associé à une valeur d'erreur entre la sortie estimée et la sortie égalisée.
En utilisant cette erreur, l'algorithme LMS tente de trouver le vecteur désiré. L'équation récursive utilisée par l'algorithme LMS est donnée par [10] :
cfc+1 = cfc + A (xk - xk) Vfc (2.50)
où [.]* désigne le conjugué de [.]. c^ est le vecteur des coefficients d'égaliseur de longueur
K, Vfc est le vecteur des échantillons du signal reçu de longueur K et le paramètre A
est le pas d'adaptation de l'algorithme LMS : il contrôle la stabilité et la convergence de l'algorithme. L'algorithme LMS est très simple : il nécessite 2K + 1 opérations par itération (K étant le nombre de coefficients d'égaliseur).
2.6.2 Algorithme RLS
L'algorithme RLS converge plus rapidement mais est plus complexe que l'algorithme LMS. Il commence par une initialisation des coefficients du vecteur d'égaliseur à zéro :
c_! = 0 . (2.51)
et
P_i = pi (2.52) où P est la matrice d'adaptation de dimension K x K, I est la matrice identité et fi est un entier positif généralement élevé. L'algorithme commence au temps k = 0. Il fonctionne de la manière suivante [25] :
Le signal est filtré par les coefficients de l'itération en cours par la relation suivante :
xk = Cfc_ivfc (2.53)
Une fois l'erreur calculée, on calcule la constante de Kalman Kk et la matrice d'adap-tation Pfc pour ajuster les coefficients d'égaliseur :
K — p
k ~ -ivfc (2.54)
Pk = { (Pfe-i - KkvkPk^)
La mise à jour des coefficients de l'égaliseur est donnée par la relation suivante : CA; = cfc_i + Pfcv^ (xk - xk) = êfc_i + Kk (xfc - xk) (2.55)
où [.]* désigne le transposé de [.]. A est un facteur d'oubli : il contrôle les variations des propriétés de l'algorithme RLS. Chaque itération de l'algorithme RLS nécessite
2.7 Comparaison des principales structures
d'égal-iseurs
Pour illustrer les sections 2.5 et 2.6, nous comparons les structures de : l'égaliseur linéaire (LE), l'égaliseur à retour de décision (DFE), l'égaliseur annuleur d'interférence (AI) et l'égaliseur utilisant l'algorithme d'estimation de séquence à vraisemblance maxi-male (MLSE).
2.7.1 Comparaisons des égaliseurs LE, DFE et AI
D'après les relations : (2.40) (2.47) et (A.5), l'erreur quadratique moyenne minimale pour les égaliseurs AI et DFE est caractérisée par :
Jmin,AI < Jmin,DFE (2.56)
Pour comparer les égaliseurs DFE et LE, on utilise l'inégalité suivante [12] :
exp / / / (:r) dx j < f exp (/ (x)) dx (2.57) Nous avons (A. 11) :
Sx = exp (T jl_[J2T In (a» \H (/)|2 + <£) df)
t (2-58)
k
On applique l'inégalité (2.57) à l'expression (2.58) :
t
°**<
df (2-
59)Jmin,LE
Donc :
L'égaliseur annuleur d'interférences (AI) permet d'obtenir la plus petite erreur quadra-tique moyenne minimale. Sa structure est très proche de celle de l'égaliseur à retour de décision (DFE). Ainsi l'Ai possède un filtre de retour qui permet de corriger l'in-terférence entre symboles (ISI) comme le DFE. Toutefois, l'égaliseur DFE réalise un compromis entre la minimisation du bruit et l'annulation des ISI alors que l'Ai sup-prime entièrement les ISI si les données de références sont bien estimées.
2.7.2 Comparaison des égaliseurs DFE et MLSE
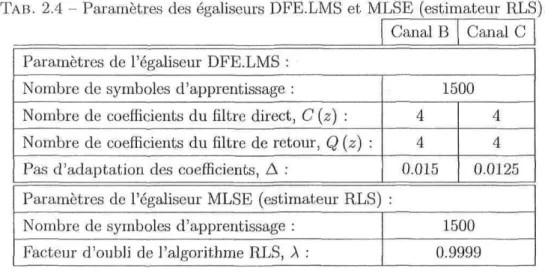
Pour comparer ces deux algorithmes, nous utilisons l'outil de simulation Matlab. Nous comparons les courbes de taux d'erreur par symbole (TES) de ces deux égaliseurs pour une modulation 4QAM non codée. Les performances en terme de TES sont évaluées par une méthode de type Monte-Carlo, et chaque valeur du TES a été obtenue par la transmission de 106 symboles d'information. La longueur de la séquence des données est
fixée à 4000 symboles. Les coefficients de l'égaliseur DFE sont adaptés par l'algorithme LMS. Pour l'égaliseur MLSE, nous utilisons l'algorithme RLS pour estimer le canal de transmission. Les interférences entre symboles (ISI) sont générées selon les modèles1 B
et C de Proakis. Les paramètres de simulation sont donnés au tableau 2.4.
TAB. 2.4 - Paramètres des égaliseurs DFE.LMS et MLSE (estimateur RLS). Canal B Canal C Paramètres de l'égaliseur DFE.LMS :
Nombre de symboles d'apprentissage :
Nombre de coefficients du filtre direct, C (z) : Nombre de coefficients du filtre de retour, Q (z) : Pas d'adaptation des coefficients, A :
1500 4 4 0.015 4 4 0.0125 Paramètres de l'égaliseur MLSE (estimateur RLS) :
Nombre de symboles d'apprentissage : Facteur d'oubli de l'algorithme RLS, A :
1500 0.9999
Les figures 2.13 et 2.14, indiquent que les deux structures donnent de bonnes perfor-mances même sur des canaux sévèrement affectés par de la propagation par trajets
tiples. L'égaliseur le plus performant est l'égaliseur MLSE : il donne d'excellentes per-formances (supérieures aux perper-formances de l'égaliseur DFE.LMS). L'inconvénient de l'égaliseur MLSE est sa complexité pour des modulations à plusieurs niveaux (16QAM, 64QAM, etc) et il devient aussi plus complexe pour les canaux à trajets multiples et variants dans le temps. Alors que l'égaliseur DFE.LMS donne des performances proches de celles obtenues avec l'égaliseur MLSE avec une complexité raisonnable.
10 • DFE.LMS
•MLSE • Canal sans ISI
10
10 12 14
SNR (dB)
16 18
FlG. 2.13 - TES des égaliseurs MLSE et DFE pour le modèle de canal B de Proakis.
i
s
10"
2 10-3 10-4 • - . -s. N S, — O — DFE.LMS \ : : : : i : : : : : : : : : : : : : : : : : : : : itîi: : : : : : : -10 15 SNR (dB) 202.8 Algorithmes d'égalisation autodidacte
Dans cette section, nous présentons les algorithmes autodidactes. Pour ces algo-rithmes, l'approche est différente au sens où il n'existe pas de séquences d'apprentis-sage. La seule connaissance à priori disponible au niveau du récepteur est les statis-tiques du signal émis. Il existe plusieurs approches d'égalisation autodidacte, on peut citer quelques algorithmes autodidactes tels que ceux de Sato [1], CMA de Godard [2], MCMA de Lin He [26], BCGR de Benveniste et Goursat [3], Stop-and-Go de G. Picchi [4], Shalvi et Wienstein [27], etc. La plupart de ces algorithmes ne convergent pas vers les solutions optimales recherchées. Les performances de ces algorithmes sont inférieures à celles entraînés. Ces algorithmes autodidactes sont bien détaillés dans [28, 29].
2.8.1 Egaliseurs utilisant les algorithmes des moindres carrés
LMS et RLS en mode de décision directe
Pour ce mode, le mode décision directe d'égalisation, les algorithmes DD.LMS2 et
DD.RLS3 convergent vers une solution unique qui coïncide avec la solution optimale au
sens de la minimisation de l'erreur quadratique moyenne. Toutefois, les performances de ces algorithmes ne sont pas optimales du fait du bruit dû à l'adaptation des coefficients. Les algorithmes DD.LMS et DD.RLS sont généralement plus bruités que les algorithmes LMS te RLS entraînés du fait de la présence possible d'erreurs de décision.
Pour la modulation BPSK, les algorithmes LMS et RLS classiques en mode de décision directe [10, 30] utilisent la fonction de l'erreur entre le symbole égalisé et le symbole estimé pour adapter les coefficients du filtre. Cette erreur est donnée par :
ek = crxsign (xk) - xk (2.61)
En 1993, Nowlan propose dans [31], une nouvelle forme de l'erreur ek- Cette erreur est calculée à partir des informations souples (rapport des valeurs de vraisemblance) :
\
Xk (2.62)
2Algorithme des moindres carrés moyens en mode de décision directe. 3 Algorithme des moindres carrés récursifs en mode de décision directe.