Exploiting Value Prediction With Quasi-Unlimited Resources
Texte intégral
Figure
![Figure 1.4: 2-level FCM predictor. From [26]](https://thumb-eu.123doks.com/thumbv2/123doknet/5551666.132856/11.918.248.671.106.484/figure-level-fcm-predictor-from.webp)
![Figure 1.5: Per-path Stride Predictors. From [14].](https://thumb-eu.123doks.com/thumbv2/123doknet/5551666.132856/12.918.144.781.110.349/figure-per-path-stride-predictors-from.webp)
![Figure 1.7: Per-Path Stride Previous-Instruction Hybrid Value Predictor. From [14].](https://thumb-eu.123doks.com/thumbv2/123doknet/5551666.132856/14.918.211.710.115.518/figure-path-stride-previous-instruction-hybrid-value-predictor.webp)

Documents relatifs
s evadent de la realite quotidienne. Au debut du XVIIeme siecle, s'impose egalement le gout pour le roman historique mauresque, tres marque par le realisme
Analyse formelle de concepts et règles d’association pour la gestion de contexte dans des
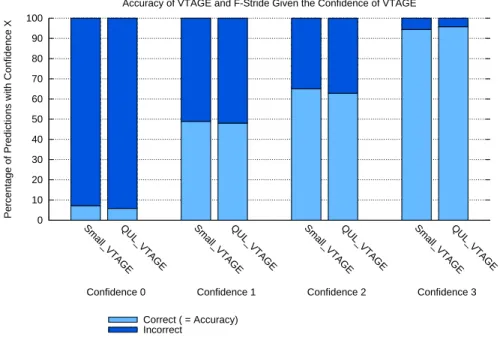
When equality is predicted with high confidence, if no other occurrence is present in the window of in-flight instructions, then the last committed value read on LCVT is used;
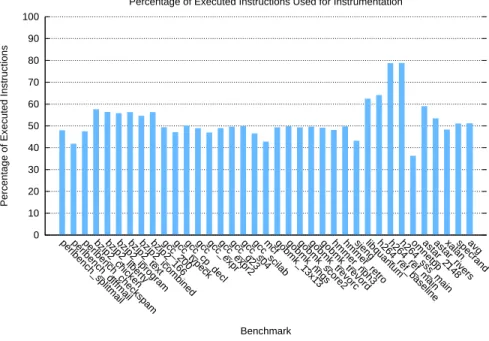
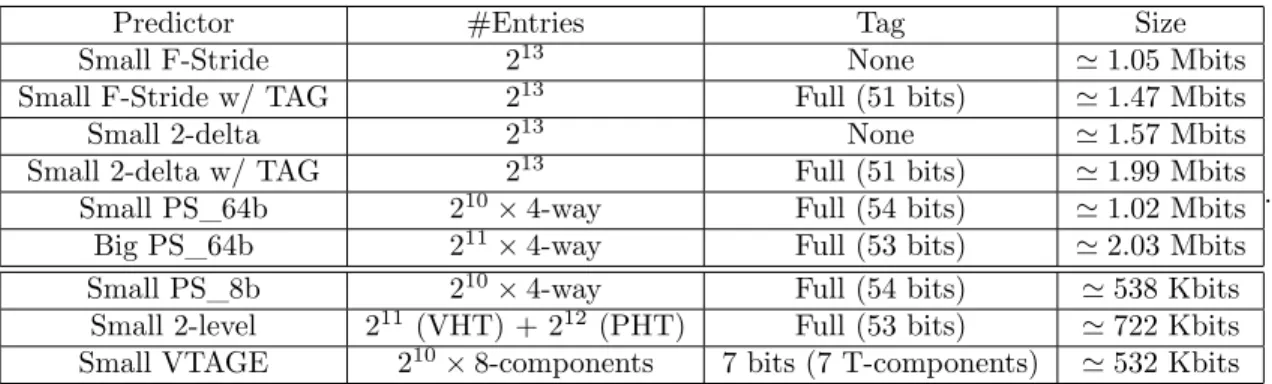
In this study we explore the performance limits of value prediction for small value predictors (8KB and 32KB) in the context of a processor assuming a large instruction win-
We present an historical review on radio observations of comets, focusing on the results from our group, and including recent observations with the Nançay radio telescope, the
Results: Using simulated data, we show that PCRR and PCIG models, using chromosome-wise SVD of a core sample of individuals, are appropriate for genomic prediction in a
In addition, based on the observation that the full range of floating point accuracy may not be always needed, we propose and implement an initial design of the tolerance value
[1] addresses two main issues: the links between belowground and aboveground plant traits and the links between plant strategies (as defined by these traits) and the
