Objets matériels fabriqués
et développement cognitif
Approches psychogénétiques
de l'instrumentation de l'action
Pierre Vérillon
L'épistémologie, notamment l'épistémologie génétique, a montré que seule une transformation contrôlée du réel permet à l'intelligence d'en mettre en évidence les aspects invariants et variationnels et donc d'en élaborer les propriétés.Dans la réalité, les contextes, les buts poursuivis lors d'activités de transformation du réel étant multiples, la genèse des connaissances qui en résulte relève de voies et de situations d'une grande variété.
Par exemple, la construction du réel et de ses propriétés peut constituer en soi la finalité de démarches systématiques de recherche et d'expérimentation : les sciences et leur enseignement représentent des formes institutionnalisées et paradigmatiques de ce rapport savant au réel.
Mais des connaissances peuvent également s'élaborer dans des situations dans lesquelles l'action sur le réel par le sujet n'est pas orientée par un projet épistémique mais par un projet pragmatique de conformation du milieu (notamment pour satisfaire aux exigences de la sphère bio-économique). Dans ce contexte, la transformation du réel apparaît comme une solution anticipée à un, ou plusieurs, problème pratique que pose le processus d'appropriation matérielle de l'environnement.
C'est à l'étude de la formation et de l'utilisation de connaissances dans de telles situations – que l'on pourrait convenir d'appeler de manière globale : techniques – que je m'intéresse au sein de l'unité « Processus cognitifs et didactique des enseignements technologiques » à 1'INRP.
conceptuel de mes travaux, il a paru intéressant, bien qu'elle soit à présent terminée, d'en présenter quelques aspects.
Dans un premier temps, j'évoquerai succinctement le cadre de la recherche. Je donnerai ensuite trois exemples de travaux empiriques auxquels elle a donné lieu. Enfin, je terminerai sur des considérations d'ordre théorique.
La recherche « objets matériels fabriqués
et développement cognitif »
La recherche « Objets matériels fabriqués et développement cognitif » a été constituée en 1984 sous la forme d'une recherche coopérative sur programme (RCP) de l'INRP dont la responsabilité était assurée par P. Rabardel (INRP, aujourd'hui au CNAM) et F. Léonard (Université de Nice). Elle s'est donné pour but d'étudier des points de vue de la psychologie cognitive et de la didactique, des situations d'interaction sujet/réel dans lesquelles les transformations opérées sur le réel par les sujets sont médiatisées par des objets conçus et fabriqués pour réaliser ces transformations. On a proposé d'appeler cette catégorie très large d'objets : les objets matériels fabriqués (OMF). Elle regroupe de fait tous les objets – ustensiles, outils, machines, etc. – qu'une société humaine produit et utilise pour assurer son existence dans la nature et que les auteurs anglo-saxons désignent par le terme « artifact ».
La spécificité de ces objets réside dans leur intrumentalité. En effet, chaque OMF a été conçu et finalisé fonctionnellement pour produire un effet, et son utilisation, dans les conditions prévues par son concepteur, vise à actualiser cet effet. Autrement dit, à chaque OMF correspond une transformation du milieu (ou un ensemble de transformations du milieu) qui a été anticipée, recherchée, et que la mise en œuvre de l'objet permet de réaliser. Dans ces conditions, les OMF constituent, au sens le plus large du terme, des instruments. Ils matérialisent dans leur structure, dans leur fonctionnement et dans les schèmes d'utilisation qui leur sont associés, une solution à un problème ou à une classe de problèmes posés dans le réel.
De toute évidence, une grande partie des activités quotidiennes des enfants et des adultes relève de situations dans lesquelles des OMF interviennent : travail, transports, tâches domestiques,
loisirs, etc. Leur mise en œuvre sollicite des sujets un fonctionnement sensori-moteur et opératoire varié, souvent complexe, voire problématique, moyennant lequel elle leur procure des possibilités étendues d'action sur l'environnement.
Ce constat a conduit à formuler l'hypothèse centrale de la recherche selon laquelle les interactions avec des OMF pouvaient être pour les sujets source d'acquis sur le plan cognitif. Quelle serait la nature de ces acquis ? Au sein de quels processus seraientils engendrés ? Quels sont les types d'activité qui favoriseraient leur apparition ? Telles sont les questions qui ont rassemblé les différents travaux menés dans le cadre de cette RCP.
Un double intérêt, éducatif et scientifique, justifiaient qu'elles soient posées.
Au plan éducatif, un des objectifs visés était de documenter par la recherche le projet, alors encore à l'étude, d'instituer un enseignement de la technologie au collège. Cet enseignement allait introduire dans l'univers scolaire des classes d'objets (les OMF) y ayant traditionnellement peu droit de cité, si ce n'est marginalement dans les « petites classes » et dans l'enseignement technique. On pouvait attendre de ces objets que, du fait de leur spécificité (matérialité, finalisation fonctionnelle…), ils engagent et stimulent le fonctionnement cognitif des élèves de manière originale par rapport aux objets scolaires traditionnels. Notamment, il paraissait intéressant d'explorer et de valoriser au plan pédagogique les différentes relations possibles aux OMF : conception, fabrication, étude, et, plus particulièrement, utilisation.
Au plan scientifique, on attendait de cette recherche une meilleure connaissance des processus cognitifs dans des situations d'apprentissage et d'utilisation d'OMF. En effet, la psychologie cognitive (hormis en psychologie du travail et en ergonomie, et ce de manière relativement récente) a assez peu investi les interactions sujet/instrument.
La recherche OMF a rassemblé un ensemble de travaux empiriques au cours desquels des élèves du collège étaient confrontés à des tâches impliquant qu'ils s'approprient et mettent en œuvre des OMF. Le plus souvent ces travaux ont donné lieu à une description fine de l'activité des sujets et à la recherche d'un effet de cette activité sur leurs représentations, conceptions et/ou connaissances.
Les trois expériences que nous allons plus particulièrement détailler ont été conduites par l'équipe de l'INRP (RABARDEL & VÉRILLON, 1985).
Apprentissage de la conduite du robot
La première expérience (RA B A R D E L, 1989) consiste en l'observation de situations d'apprentissage par la découverte de la conduite d'un bras manipulateur de type YOUPI que l'on peut caractériser comme une machine à déplacer des objets dans l'espace. Dans la tâche que nous décrirons le dispositif de pilotage consiste en un boîtier de commande à trois curseurs mobiles. Chaque curseur, de couleur différente, correspond à un axe du repère tridimensionnel XYZ de l'espace de travail du robot, de sorte que chaque position relative des trois curseurs détermine une position de l'extrémité de sa pince dans cet espace. L'ouverture et la fermeture de la pince sont commandées par l'intermédiaire du clavier du micro-ordinateur.
Comme les rails de déplacement des curseurs sont orthogonaux entre eux et qu'ils sont situés sur le boîtier par rapport à une zone figurant la place occupée par le socle du robot dans son espace de travail (cette dernière indication étant fournie aux élèves), on peut considérer que « l'espace de commande » (ex. : les curseurs orthogonaux et la représentation de l'emprise du socle) constitue une représentation de l'espace de travail du robot. Compte tenu de cette propriété, on pouvait penser que l'apprentissage du robot serait relativement aisé et qu'il conduirait les élèves à des conceptualisations de l'espace en terme de repères tridimen-sionnels. En fait on verra que cette construction s'effectue par étapes et non sans difficulté pour les élèves.
La tâche consistait à déplacer des plots à l'aide du robot. Les situations étaient enregistrées au magnétoscope. Les représentations et conceptions relatives au dispositif successivement élaborées par les élèves sont inférées de leurs graphismes et verbalisations spontanés ou provoqués par l'expérimentateur.
Résultats
L'analyse met en évidence cinq moments par lesquels semble passer l'ensemble des élèves dans la microgenèse des propriétés du dispositif.
1) Au premier niveau, l'atteinte du plot et son transport sont obtenus par une gestion de proche en proche des déplacements de la pince grâce à la manipulation sous contrôle visuo-moteur des différents curseurs. Ceux-ci sont considérés comme commandant chacun le mouvement d'une articulation ou d'une partie du robot.
Par exemple :
– le curseur bleu fait tourner la base, – le rouge fait bouger le coude,
– le jaune fait bouger l'épaule.
Cette représentation s'avère fonctionnelle mais très localement : elle permet de prévoir et de justifier de manière approximativement correcte le comportement du robot dans sa zone frontale.
2) Cette représentation s'avère vite non pertinente pour rendre compte du fonctionnement du robot dans les zones latérales. La modélisation initiale va donc évoluer en se spécifiant selon la zone considérée : les curseurs gardent chacun une fonction dominante (celle définie pour la zone frontale), mais à celle-ci se superpose un effet supplémentaire dans la zone latérale. Par exemple, le déplacement du curseur rouge lorsque la pince est dans cette zone provoque toujours un mouvement du coude mais aussi un mouvement supplémentaire de la base. L'intérêt de cette étape réside donc dans le fait que les sujets opèrent une première différenciation de l'espace de travail du robot qui n'est plus considéré comme homogène.
3) La troisième étape est caractérisée par la constatation que font les élèves qu'il existe une interaction entre curseurs dans certaines zones. Par exemple, l'action simultanée du curseur rouge lors du déplacement du curseur bleu semble, à la frontière des zones latérales et frontales amplifier l'effet dominant qui lui est attribué (faire tourner la base).
4) La quatrième étape est marquée par une modification radicale de la représentation de la situation. La lecture des effets de la commande n'est plus effectuée en fonction de modifications de la configuration du robot mais par référence aux déplacements de la
pince dans l'espace de travail : par exemple, le curseur bleu permet d'aller de gauche à droite, le rouge, d'avant en arrière.
Corrélativement apparaît le constat d'une proportionnalité dans l'ampleur des déplacements conjoints des curseurs et de la pince. On assiste donc à la prise de conscience progressive d'un homomorphisme entre la géométrie des actions de commande et la géométrie des déplacements, c'est à dire à la constitution et à la mise en relation par les élèves d'un espace de commande et d'un espace de travail.
5) La dernière étape marque l'accession à une représentation où le dispositif de commande n'est plus conçu comme générant des déplacements de la pince dans l'espace de travail mais comme y définissant sa position la position relative des curseurs détermine la position de la pince. Dans un premier temps, ces positions sont repérées par rapport au socle dans l'espace de travail et par rapport à sa représentation dans l'espace de commande (ce n'est qu'à présent qu'elle peut prendre sa signification pour l'élève alors qu'elle était indiquée dès le début par l'expérimentateur). Dans un second temps les positions sont définies par un système d'axes : la position simultanée des trois curseurs déterminant dans le repère de l'espace de commande un point ayant pour correspondant dans le repère de l'espace de travail la position de l'extrémité de la pince.
Anticipation de moyens d'engendrement de surfaces
Cette expérience (VÉRILLON, 1988) a consisté à demander à des élèves de 5e de concevoir des moyens d'engendrement de surfaces
planes et de révolution sur des pièces en bois.
L'objectif était de repérer, grâce à l'analyse des dispositifs techniques imaginés par les élèves les solutions à la fois physiques et géométriques mises en œuvre pour gérer le processus de transformation.
Pour cela nous leur avons demandé d'imaginer des moyens permettant de transformer une pièce de bois prismatique en un cylindre (ou à l'inverse un cylindre en parallélépipède, ou encore un parallélépipède en cône, etc.). Pour minimiser les biais liés à l'emploi d'une terminologie savante, la question effectivement posée était « Comment ferais-tu, toi, pour fabriquer un objet ayant cette forme-là, à partir d'un objet comme celui-ci ? » Les pièces
montrées aux sujets, et qu'ils pouvaient manipuler à leur guise, étaient des solides en bois d'approximativement 100 x 30 x 30 mm. Les entretiens étaient enregistrés en vidéo et les analyses ont porté sur les verbalisations et les graphismes produits par les élèves en cours d'entretien.
Résultats
La première procédure invariablement évoquée par les sujets pour obtenir la forme visée, consiste à éliminer d'abord grossièrement l'excès de matière, le plus souvent grâce à un outil tranchant (couteau ou cutter) ou à l'aide d'une scie, puis à assurer la finition par abrasion : lime, « ponçoir », papier de verre…
Certains élèves proposent de tracer sur les bases du solide de départ des repères permettant de guider leur action. Par exemple, pour produire un cône à partir d'un parallélépipède, ils dessineraient un cercle sur une base et un point au centre de la base opposée. Ce tracé permet « quand on le regarde » de contrôler, lors de l'enlèvement de matière, « que ce soit bien droit » et « que ça ne parte pas sur le côté » (« ce » et « ça » désignent une droite de visée – donc projective – qui dans une conceptualisation euclidienne, manifestement non mise en œuvre ici (cf. PIAGET & INHELDER, 1948), correspondrait à la génératrice du cône).
En définitive, la solution systématiquement proposée consiste en une conformation progressive de la pièce de départ, par enlèvement manuel de la matière, de proche en proche, jusqu'à imiter, en l'épousant au plus près, la forme visée qui se trouve pendant l'opération en quelque sorte projetée mentalement dans le « brut ».
Néanmoins, aucun des élèves ne pense que ce procédé soit celui utilisé sur le plan industriel pour produire les formes demandées : « Ça se fait avec des machines, sinon ils en mettraient du temps… Et puis une machine, c'est quand même plus juste ! »
Nous leur avons donc demandé, dans un deuxième temps, comment ils se représentaient de telles machines.
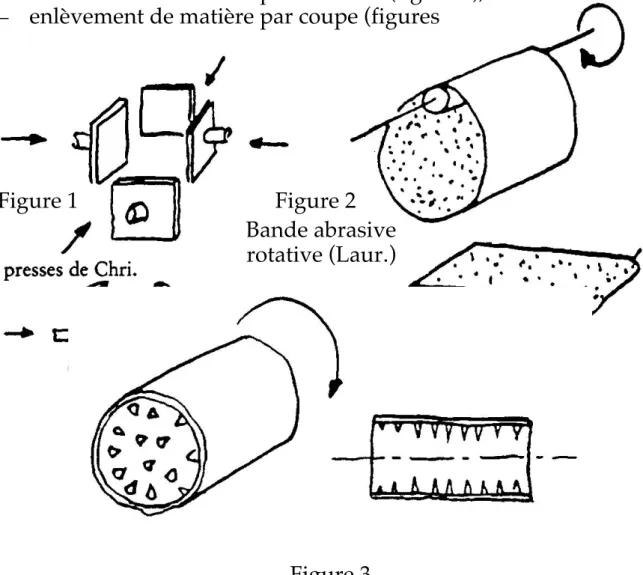
À l'examen de leurs réponses, on constate une relative diversité des solutions mécanisées proposées qui contraste avec la procédure, quasi identique d'un sujet à l'autre, anticipée pour la fabrication manuelle. Si l'on écarte une première proposition d'un sujet consistant en une sorte de télémanipulateur permettant,
procédure manuelle, on peut les regrouper en trois catégories selon le schème technique de conformation de la matière mis en œuvre :
– moulage ou déformation (figure 1),
– enlèvement de matière par abrasion (figure 2), – enlèvement de matière par coupe (figures
Figure 1 Figure 2
Bande abrasive rotative (Laur.)
Figure 3
Cylindre muni de dents (Marc)
L'enjeu principal et la difficulté de la tâche résident dans la gestion des aspects spatiaux de la transformation. Dans les procédures non mécanisées, la régulation en force et en direction de l'action transformatrice se fait de manière rétroactive, en gérant au coup par coup, sous le contrôle de visées successives éventuellement facilitées par des repères tracés sur la pièce, l'écart à l'état final. Mais ceci en l'absence d'une coordination spatiale générale de l'action. C'est d'ailleurs essentiellement parce qu'elles permettent de faire l'économie d'une géométrisation d'ensemble du dispositif de fabrication que ces procédures sont spontanément proposées.
Figure 4
scie cylindrique (Poch, Irit, Besm)
Figure 5
lames rotatives (Do.)
Figure 6
« compas » à lame (Aure)
Figure 7
lames rotatives pour produire des cônes (Do.)
En revanche, la consigne de mécaniser la tâche est interprétée comme entraînant la dévolution à la machine de la gestion des aspects énergétiques et spatiaux de la transformation. D'où la nécessité de la doter d'opérateurs physiques et géométriques lui permettant à coup sûr, de manière proactive, de produire la forme voulue. La réponse de type télémanipulateur, qui permet de conserver le réglage rétroactif et au coup par coup de l'enlèvement de matière, constitue une tentative de contourner la difficulté que constitue pour les élèves la conception de tels opérateurs. Leur élaboration nécessite en effet une analyse des propriétés géométriques des formes visées, la conception de la forme des outils et des trajectoires ainsi qu'une coordination spatiale anticipée des actions.
Or, dans ce sens, on constate que les autres dispositifs proposés témoignent de manière plus ou moins poussée d'une dissociation
moins grande des moyens de son engendrement. Ainsi, par exemple, la géométrie des presses conserve-t-elle, en l'inversant simplement, la forme à produire : comme le dit une élève, « pour obtenir cette forme-là, il faut bien que la machine ait la même forme ». En revanche, l'engendrement par bandes abrasives en translation, tout en conservant encore la forme, implique une analyse en terme de surface. De même les autres dispositifs mettant en œuvre sous différentes géométries des arêtes et points coupants animés de mouvements règlés révèlent une capacité, au moins « en acte » (VERGNAUD, 1985), à dissocier la forme initiale en lignes ou points générateurs en liaison avec des directrices et des axes de symétrie.
Apprentissage de la conduite du tour
Comme pour la première expérience, il s'agit d'une situation d'apprentissage par la découverte, en l'occurrence de l'utilisation d'un minitour EMCO CompactS (VÉRILLON, 1988).
L'expérimentateur effectuait d'abord une présentation minimale de la machine consistant à designer la pièce à usiner (en place dans le mandrin), l'interrupteur commandant sa mise en rotation, l'outil (présenté comme l'opérateur de l'enlèvement de matière) et les volants, transversal (T) et longitudinal (L), commandant ses déplacements. Ensuite, chaque sujet (les mêmes que dans l'expérience précédente) était invité à proposer, et si possible à exécuter, une procédure pour reproduire, sans prise en compte des dimensions, une pièce modèle comportant des surfaces cylindrique et conique.
L'outil monté était un outil à charioter, donc conçu pour un travail d'enveloppe, c'est à dire de génération de surface par un point (en l'occurrence théorique) : le bec de l'outil (figure 8).
L'objectif était de tenter de suivre dans son évolution la construction par les sujets d'une représentation fonctionnelle de cet instrument, en l'éclairant si possible des enseignements tirés de l'expérience précédente.
Ici encore, l'analyse a porté sur l'enregistrement vidéo du comportement et des verbalisations des élèves.
Résultats
Si l'on exclut quelques premières réponses guidées par la conviction d'une hyper-automatisation de la machine (il suffirait de placer l'outil en contact avec la pièce pour que le tour prenne en charge la totalité du processus de transformation), les stratégies spontanées initiales des élèves paraissent être orientées par deux conceptions générales du fonctionnement du tour.
Une première procédure conduit les sujets à venir, grâce au volant T, mettre l'outil en contact avec la pièce, provoquant ainsi une légère coupe. L'enlèvement de matière est ensuite prolongé sur une certaine longueur de la pièce à l'aide du volant L, déterminant, de fait, une légère « passe » cylindrique.
Cependant, on constate lors de l'entretien que la forme obtenue n'est pas nécessairement cylindrique pour les élèves et que d'ailleurs la même procédure peut être utilisée pour obtenir une forme conique. En effet, il s'avère que sous cette conception, l'outil est imaginé comme exerçant en continu une force dirigée vers la pièce. En conséquence, l'action d'enlèvement de matière, qualifiée « d'usure » par les sujets, peut se trouver distribuée plus ou moins régulièrement le long de la pièce selon la vitesse de rotation imprimée au volant L.
La quantité de matière enlevée en un point de la pièce étant conçue comme dépendant de la durée de contact de l'outil en ce lieu, l'obtention de différentes formes peut effectivement être anticipée. Elles résultent, soit d'un manque d'adresse : on doute de la cylindricité de la pièce parce qu'on a « ralenti » pendant la passe, soit d'une stratégie délibérée : on obtient un cône en « usant » progressivement davantage la pièce lorsqu'on s'approche de son extrémité.
Sous la seconde conception, l'obtention de la forme désirée est prévue et réalisée par une série de coupes – les élèves parlent de « tailler » – produites à l'aide du volant T et réitérées
successive-ment le long de la pièce en décalant chaque fois l'outil d'un cran à l'aide du volant L.
Le problème, souvent anticipé par les élèves, étant données la forme et la disposition de l'outil, est celui de la forme conique du sillon obtenu à chaque passe transversale (figure 10).
Aussi réclament-ils une modification – jugée selon eux néces-saire – de l'orientation de l'outil de façon à pouvoir usiner soit, pour certains avec sa cuvette concave (figure 8) : « ça a la même forme », soit pour d'autres, avec l'arête rectiligne orientée parallèlement à la pièce (figure 9). À défaut, ils se proposent d'arriver progressivement à la forme cylindrique en « attaquant » avec le bec de l'outil les sommets des sillons, dont ils prévoient, après plusieurs cycles, la disparition (figure 10).
Figure 9
Figure 10
Pour la plupart des élèves, l'idée de pouvoir générer une surface cylindrique grâce à une seule coupe rectiligne n'apparaît que tardivement (et, a fortiori, plus tardivement encore pour le cône dont la génératrice est oblique par rapport à l'axe de rotation).
Elle nécessite en effet la prise de conscience de certaines propriétés spatiales invariantes – par sa conception même – du tour : par exemple, la conservation, sous l'action du volant L, de la distance de l'outil à l'axe de rotation de la pièce.
Mais, solidairement, elle nécessite également une décentration du sujet par rapport à ses propres actions afin de pouvoir les resituer et les coordonner dans un espace d'ensemble. En effet seule la découverte consciente ou « en acte » des structures spatiales sous jacentes à ses procédures, souvent liée à leur mise en échec, permet de les recomposer et, par exemple, de prendre conscience de relations d'équivalence entre un outil de forme et un
point générateur muni d'une trajectoire adéquate ou encore entre l'itération d'opérations élémentaires et leur forme composée.
En définitive, un enjeu essentiel présent dans ces trois tâches consiste pour le sujet à se représenter la nature et les conditions de la transformation en jeu et à spécifier la part relative qui revient, pour la conduire, à ses propres actions et à celles de la machine. C'est notamment les aspects génétiques de cette répartition de l'action entre l'élève et différents dispositifs techniques que ces expériences ont mis en évidence. On a vu qu'elle est l'histoire de la dévolution progressive à l'instrument, de manière parfois insuffisante ou excessive, de tâches initialement conçues comme relevant de l'utilisateur
– réglage des mouvements articulaires, puis des trajectoires de la pince, dans le cas du robot,
– réglage des trajectoires de l'outil pour le tour.
Comment rendre compte de ce processus ? Au sein de quel cadre théorique ? Telles sont quelques interrogations que ces observations adressent à la psychologie et dont nous discuterons brièvement pour terminer.
Aspects théoriques
Problématiser l'étude des relations sujet/OMF dans le champ de la psychologie n'est pas sans soulever des difficultés dans la mesure où les théories dominantes dans le champ – empiristes, gestaltistes, constructivistes – restent très marquées au niveau de leur cadre conceptuel par leur fondement naturaliste. Ainsi le dualisme organisme/milieu hérité de la biologie constitue en psy-chologie le formalisme implicite sous-jacent à tout un ensemble de relations dyadiques : sujet/réel, homme/machine, élève/savoir, etc. Ces modélisations bi-polaires ainsi que les différentes théories explicatives du fonctionnement cognitif qui leur sont associées : schéma stimulus-réponse, préformisme, équilibration s'avèrent le plus souvent réductrices lorsqu'elles sont mobilisées pour rendre compte de conduites impliquant des OME Comme le font remarquer LEPLAT et PAILHOUS (1973), « l'appropriation d'un tel objet est impossible par adaptation, par simple "équilibration" avec ses propriétés physiques ». De fait, leur statut de médiateurs externes, artificiels, relayant et potentialisant les fonctions
adaptatives endogènes à l'organisme les rend relativement inclassables pour les psychologies naturalistes.
Les psychologies qui ont cherché leur ancrage épistémologique davantage du côté de l'anthropologie que de la biologie ouvrent en revanche des perspectives permettant d'articuler développement cognitif et médiation artificielle du sujet à la nature. VYGOTSKI (1985), notamment, accorde à l'instrument – « nouvel élément intermédiaire s'intercalant entre l'objet et l'opération psychique dirigée sur celui-ci » – un rôle déterminant dans la formation des « fonctions psychiques supérieures » (perception, mémoire, résolution de problèmes, etc.), et à « l'acte instrumental », le statut « d'unité élémentaire d'analyse » de ces fonctions. Rompant avec les conceptions dualistes, il dégage pour l'instrument un espace intermédiaire dans lequel, selon la formule de MOUNOUD (1970), celui-ci constitue « simultanément un contenu par rapport aux actions du sujet et une forme par rapport aux objets auxquels il s'applique ». Il permet de restituer ainsi la complexité de « l'acte instrumental ». En effet, celui-ci, comme le fait apparaître une modélisation dés lors nécessairement ternaire (RABARDEL & VÉRILLON, 1985), engage l'activité représentative et opératoire du sujet par rapport à trois zones d'interaction : interaction sujet/instrument, interaction instrument/réel et interaction sujet/réel médiatisée par l'instrument.
Une telle modélisation s'avère particulièrement éclairante pour analyser les données recueillies en nos trois situations problème. En effet, ni les microgenèses observées lors de la découverte du tour et du robot, ni les évolutions constatées lorsque les élèves passent d'une anticipation de fabrication manuelle à une
anticipation de moyens mécanisés, ne nous paraissent résulter d'un simple processus d'assimilation-accomodation de l'instrument par le sujet. Au contraire, elles témoignent d'une double élaboration progressive et solidaire : celle des propriétés du dispositif technique et celle des propriétés du réel à transformer, ici essentiellement d'ordre spatial en raison de la nature des tâches. Les prises d'information sur l'instrument, l'activité représentative et opératoire des élèves lors de la conduite de celui-ci (interaction sujet/instrument) se sont toujours avérées être en interdépendance avec leurs conceptions relatives à la nature du processus transfor-matif (interaction instrument/réel), l'instrument médiatisant l'action du sujet sur le réel mais, en retour médiatisant son appréhension du réel (interaction sujet/réel médiatisée par l'instrument).
Bibliographie
LEPLAT J., PAILHOUS J. (1973), « Conditions cognitives de l'exercice et de l'acquisition des habiletés sensori-motrices », Bulletin de
psychologie.
MOUNOUD J. (1970), Structuration de l'instrument chez l'enfant, Delachaux et Niestié.
PIAGET J., INHELDER B. (1948), La représentation de l'espace chez
l'enfant, PUF.
RABARDEL P. (1989), « Analyse de l'activité cognitive et modélisation des situations pour l'évaluation et la conception de robots pédagogiques », Actes du 1 congrès francophone de robotique
pédagogique, Le Mans.
RABARDEL P., VÉRILLON P. (1985), « Relation aux objets et développement cognitif », Actes des 7e journées internationales sur
l'éducation scientifique, Chamonix.
VERGNAUD G. (1985), « Concepts et schèmes dans une théorie opératoire de la représentation », Psychologie française.
VÉRILLONP. (1988), Conceptualisation géométrique et activités
d'usinage, Coll. Études et recherches en enseignements
technologiques, INRP.
VYGOTSKI L. S. (1985), « La méthode instrumentale », in Schneuwly B., BronckartJ.-P., Vygotski aujourd'hui, Delachaux et Niestlé.