Conditional expected likelihood technique for compound Gaussian and Gaussian distributed noise mixtures
11
0
0
Texte intégral
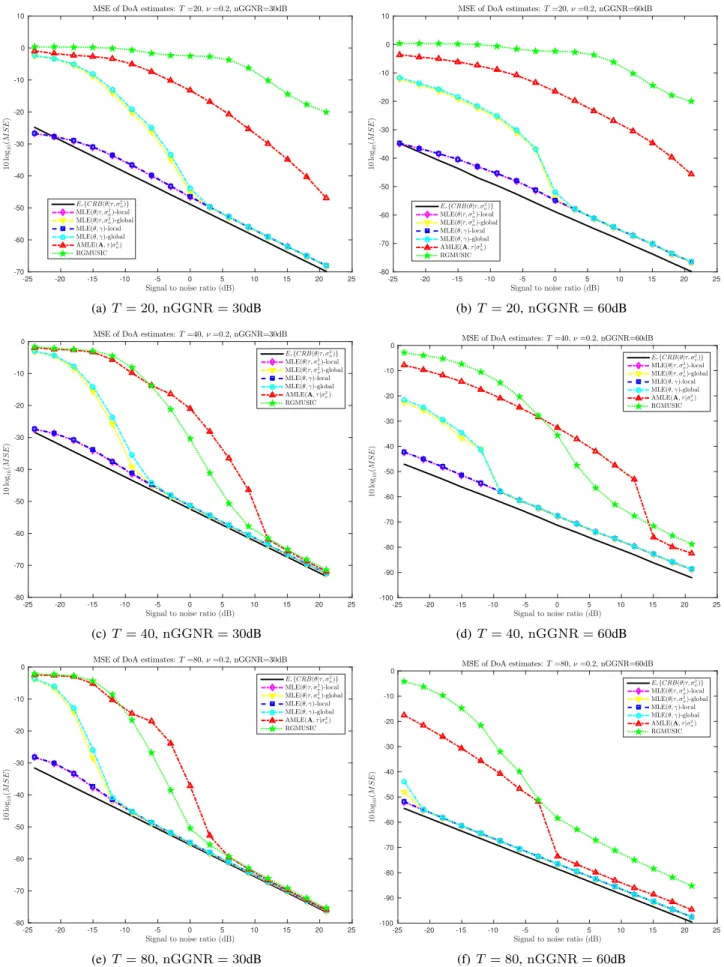
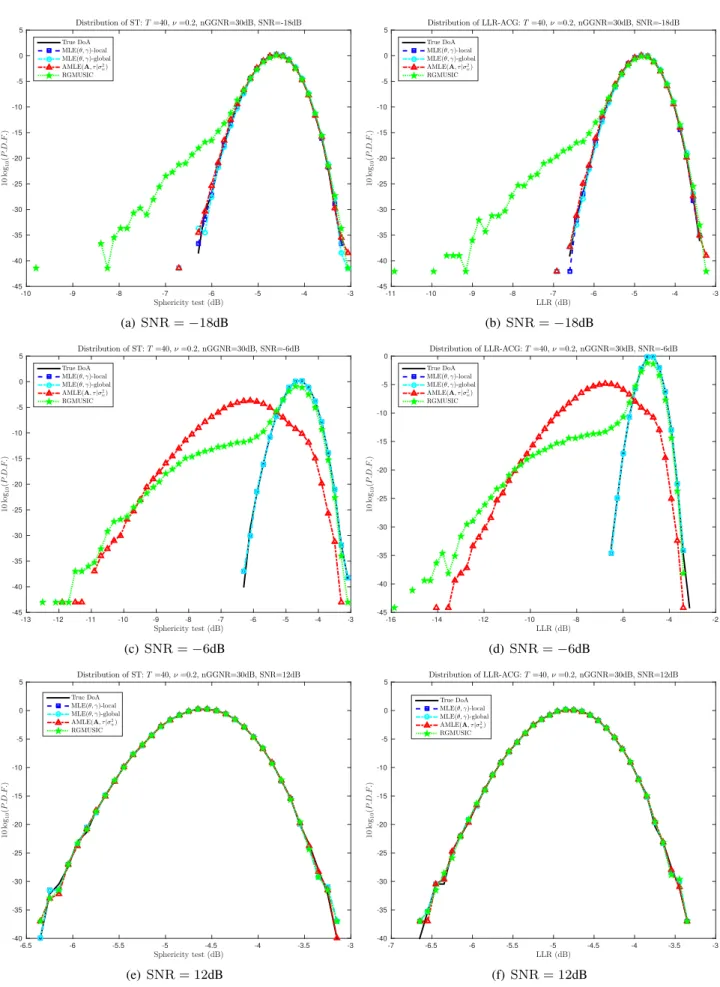
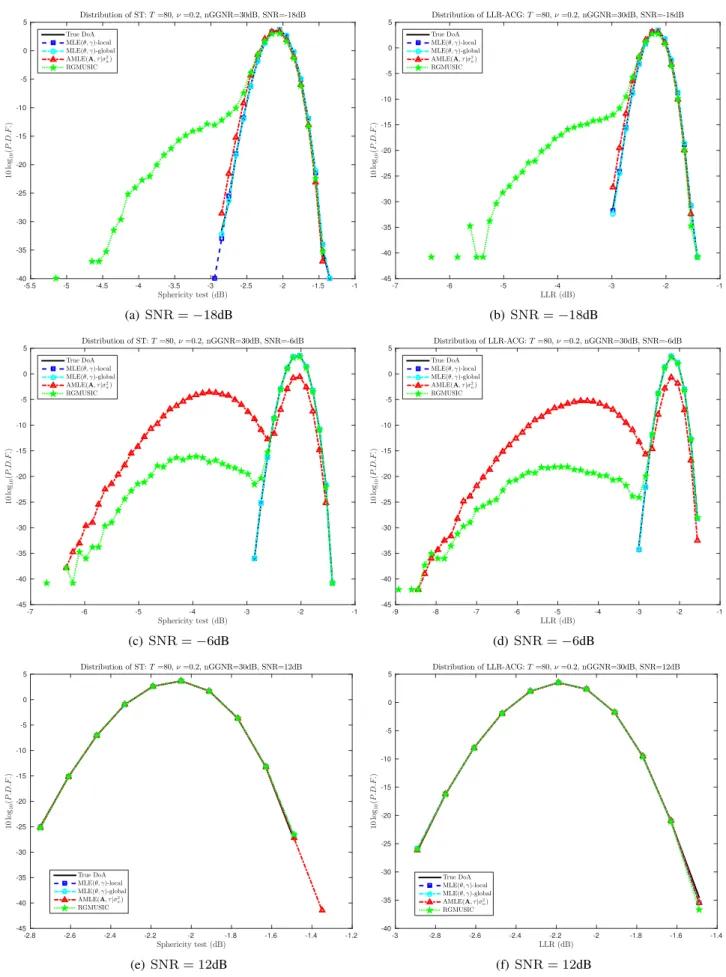
Figure
+2
Documents relatifs