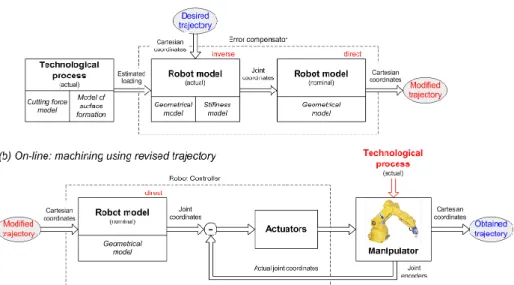
Compliance error compensation in robotic-based milling
Texte intégral
Figure
![Table 1. Initial data for robotic-based milling Joint coordinates, [deg]](https://thumb-eu.123doks.com/thumbv2/123doknet/7795501.260460/15.892.281.612.814.992/table-initial-data-robotic-based-milling-joint-coordinates.webp)
Documents relatifs
Result of segmentation using Active Contours based on Splines using good initialization: (left) original image, (middle) evolution of spline.. curves, (right) the
Ministère de l’enseignement supérieur et de la recherche Université D’Oran2 Ahmed Benahmed. Faculté des
Keywords: Real Time (RT), Service Component Architecture (SCA), Service Oriented Architecture (SOA), Component Based Software Engineering (CBSE), Model Driven Software
The proposed approach breaks the problem into two scheduling problems that are solved sequentially: a ‡ow shop problem with additional constraints (blocking and transportation
To summarize the current state of the art, the convergence of the discrete penalized solution towards both the solution to the penalized problem and of the Signorini problem are
The details of Lémeray’s rise to prominence in France throw light on the re- ception of Einstein’s theory. Archival documents reveal that Lémeray sought the Paris Academy’s
Treatment with pertuzumab (24 h) led to HER3 protein increase, which could be involved in bypassing the pertuzumab-induced HER2 inhibition, as observed by Garrett et al [24]
