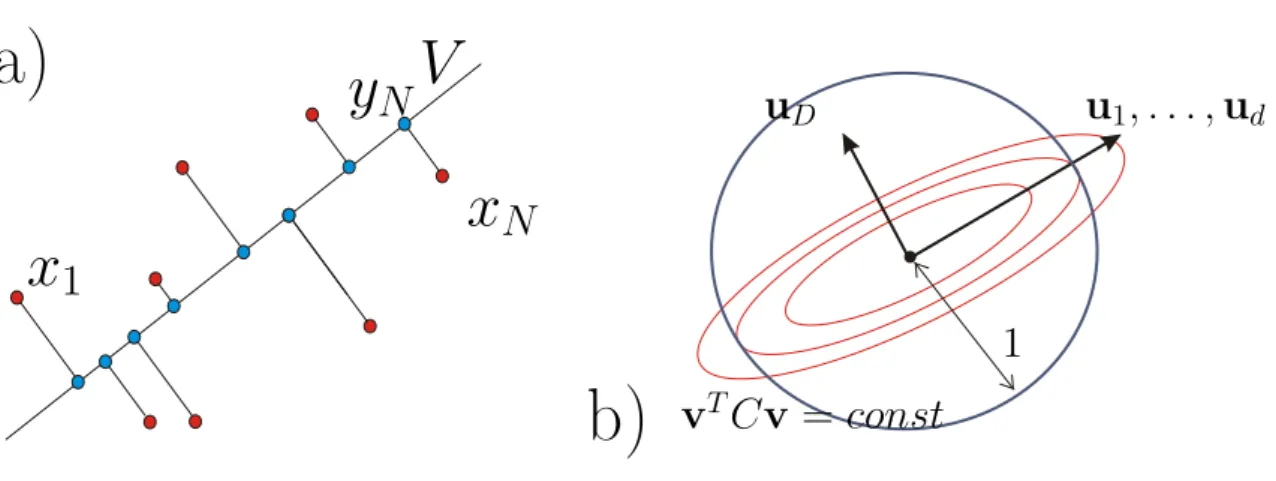
Manifold learning and applications to shape and image processing
176
0
0
Texte intégral
Figure

+7


Documents relatifs