Sur la solution numérique d’équations différentielles d’ordre fractionnaire
65
0
0
Texte intégral
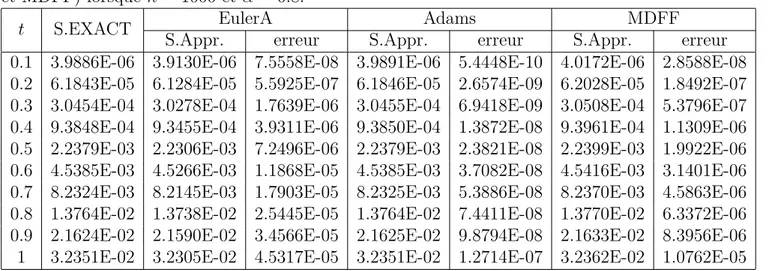
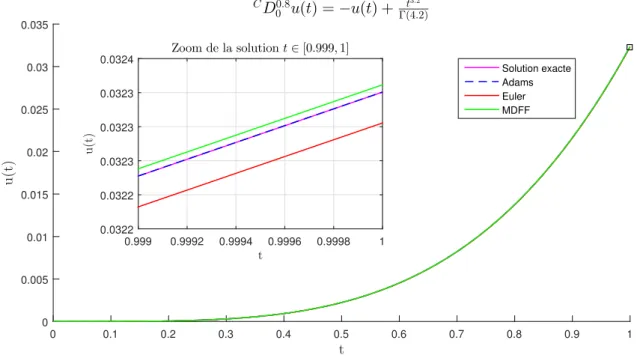
Figure
+7
Documents relatifs