Multi-lane Vehicle-to-Vehicle Networks with Time-Varying Radio Ranges: Information Propagation Speed Properties
Texte intégral
Figure
Documents relatifs
When both vision-based and map-based lane markings of current lane is obtained, vehicle positions are optimized using a multi-kernel based estimation method.. 4 shows the
The GVRPTW consists in finding M vehicle routes such that the traveling cost is minimized and : (i) every route starts and ends at the depot; (ii) each cluster is visited exactly
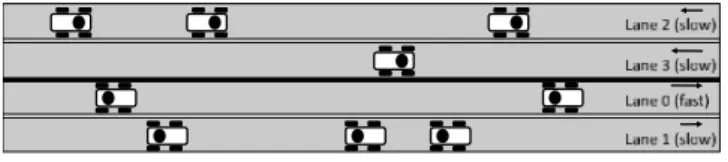
In this context, our contributions are as follows: (1) in Section 2 we present a time-varying radio range model for information propagation in multi-lane vehicle-to-vehicle
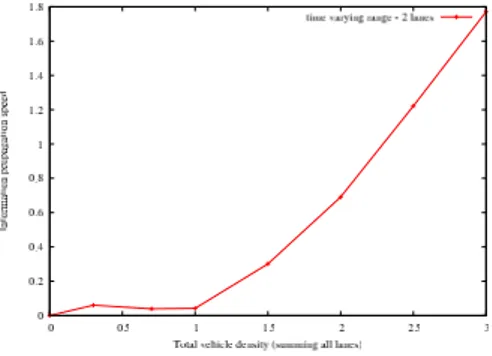
(2) we show the existence of a threshold (with respect to the vehicle density), above which the information speed increases dramatically over the vehicle speed, and below which
In this paper we have initiated a partial characterisation of the information propagation speed of Delay/Disruption Tolerant mobile Networks (DTNs) and Intermittently Connected
In this paper we address the Multi Trip Vehicle Routing Problem with Time Windows and Release Dates (MTVRPTWR).. It is noteworthy that the problem is deterministic even if
When the vehicle is traveling on a lane with lane markings, the camera is supposed to be able to detect one or both border lines of the lane. Map-matching here is to determine which
Experimental results show that this tightly coupled approach clearly improves the performance in terms of accuracy and integrity compared to a loosely coupled method that uses GPS
