Generation of whole-body motion for humanoid robots with the complete dynamics
Texte intégral
Figure




Documents relatifs
traitement de la maladie de Freiberg, mais la technique la plus conservatrice et de choix même à un stade avancé reste l’ostéotomie cunéiforme à base dorsale et à
This document is the final report of the PROMISE research project that focuses on developing a federal strategy for the preservation of the Belgian web. The web has become
Induction magnétique Coeff de bobinage du premier harmonique relatif à l’enroulement de l’inducteur Induction dans l'entrefer Induction magnétique de l’aimant Niveau bas des
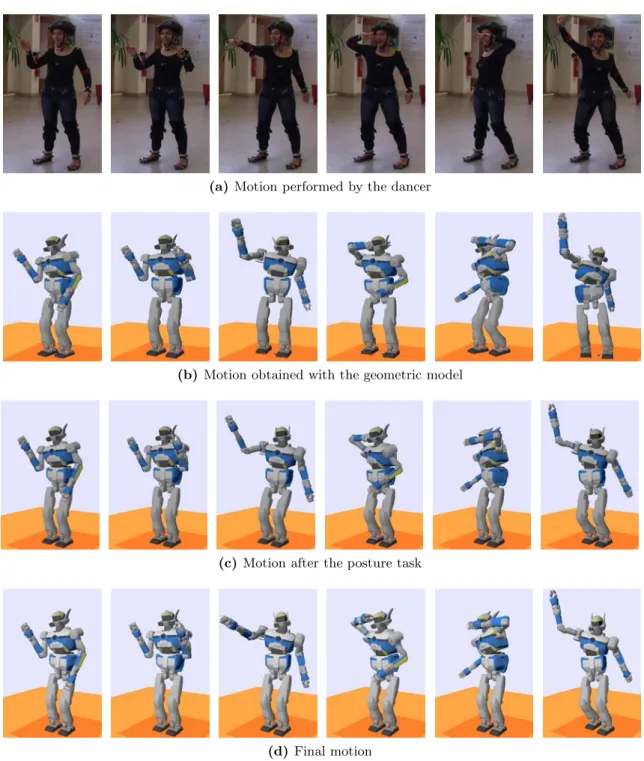
Figure 6.3: Path reshaping considering a dynamic task (a) Three-step strategy applied to the problem of humanoid robot motion generation.. (b) Motion
Both the contact forces and momenta are crucial for ensuring balance in motion anticipation: control over the former allows to avoid tipping and slipping, over the latter – to
The first stage of our algorithm uses a sampling-based constrained motion planner and computes a collision-free statically balanced path for a robot which can be fixed or sliding on
To achieve these tasks that challenge the robot balance, this paper proposes the integration of the capture point in the operational- space inverse dynamics control framework so
2) The Centroidal Optimizer: It solves the trajectory optimization problem over the centroidal dynamics using feasibility measures to enforce the kinematic feasibility of the
