Modélisation et planification de trajectoire d’un robot humanoïde dans un environnement virtuel
Texte intégral
Figure





Documents relatifs
C'est ainsi que l'artiste fait son intrusion dans la réalité, en cherchant les rapports harmonieux entre les choses.. Cette réalité seconde de l'objet est donc
The results of the oedometric test showed that the material I2 has An average oedometric modulus of 10,045 kPa, a low compressibility index of 0.125 and a very low swelling index
Nous avons volontairement mis au singulier le système décisionnel et le lac de données dans nos différentes figures, mais comme nous le verrons dans le chapitre suivant 5.1 ,
L’entreprise doit essayer agir avec, par et sur la personne : il faut pour cela comprendre un peu mieux les comportements, les attentes, les motivations des personnes, et
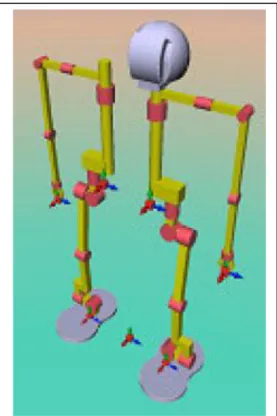
Le chronogramme de la figure 4 donne la commande du moteur de hanche durant la phase de lever de la jambe gauche.. Etude du réducteur de moteur
Le modèle de Mélange Parfait et le modèle de balayage Hybride (combinant mélange parfait et déplacement parfait) sous-estiment les gaz résiduels pour la plupart des
Penser l’égalité dans les représentations du métier de professeur d’EPS consiste, au-delà du nombre de filles et de garçons en Staps, à appréhender les mécanismes de
ةمتاخلا 45 ةمتاخلا تاقيبطتلاو تلااجملا نم ديدعلا ةمدخ يف ةسوملم جئاتن تطعأ يتلا مولعلا مهأ نم تارولبلا ملع ربتعي ملاعلإا لئاسوو تاقاطلا لاجمك لاصتلااو
