Commande predictive a base de programmation semi definie
Texte intégral
Figure







Outline
Documents relatifs
La méthode que nous proposons est basée sur l'utilisation de la technique de placement de pôle pour déterminer les gains de régulateur et les gains de l'observateur
On note q la forme
Systèmes d'équations diérentielles linéaires.. Exemple
Réponse : s’assurer avant de déterminer l’estimer de l’état que les capteurs (mesures) sont bien placées sur le système pour que le système soit observable ou
Si dans les quinze quadrilatères que forment les six côtés d'un hexagone, les quinze droites qui passent par les milieux des diagonales, concourent en un même point, l'hexagone
Il suffit d'établir les tables de vérité de ces deux propositions et de vérifier qu'elles sont identiques... En revanche, la réciproque
Cette idée laisse penser que pour un système qui n’est pas stabilisable par un re- tour de sortie statique classique, l’introduction d’un retard dans une loi de commande par retour
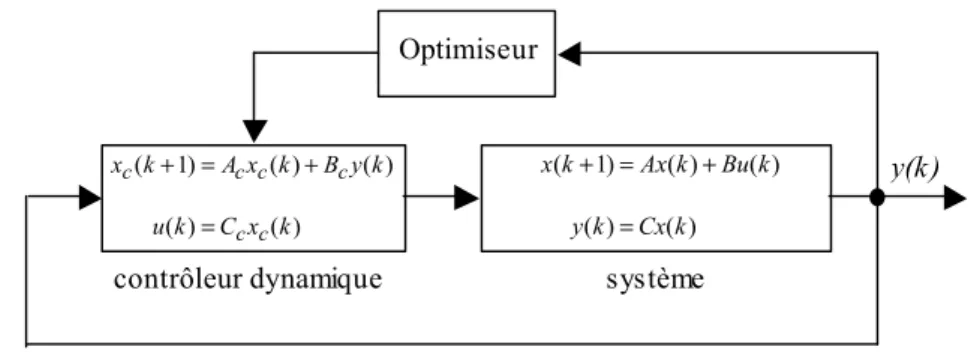
On énonce un théorème qui donne des conditions suffisantes pour obtenir un contrôleur dynamique de retour de sortie, qui assure la stabilité d'un système nominal avec restrictions
