Contribution à l’optimisation de trajectoires des robots mobiles
Texte intégral
Figure
Documents relatifs
They depend on the network topology and exhibit a transi- tion depending on the initial conditions, i.e., one needs to activate initially a minimum number of nodes to ensure that
Thanks to cable actuation, forces are applied on the mechanism and modify its equilibrium configuration.. The computation of the input forces in made thanks to a dynamic
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
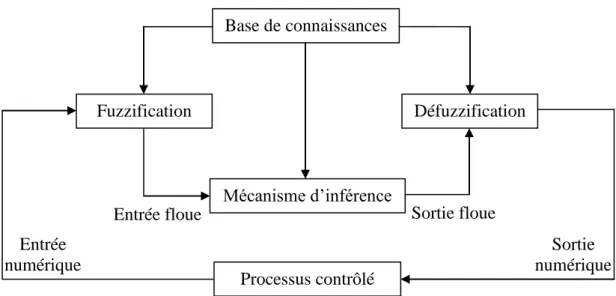
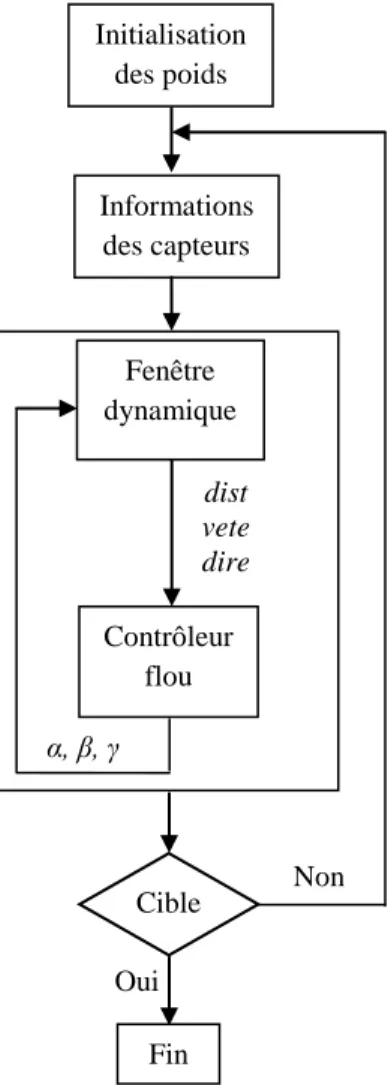
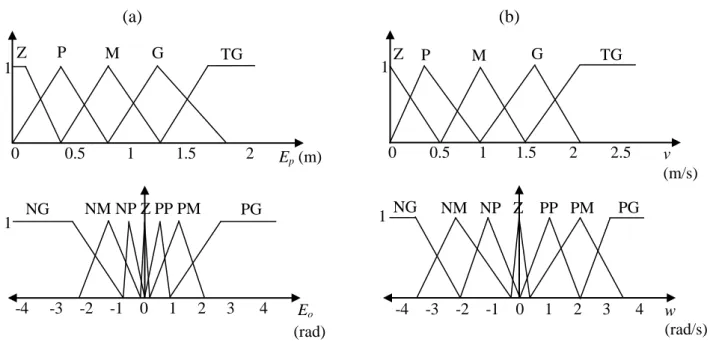
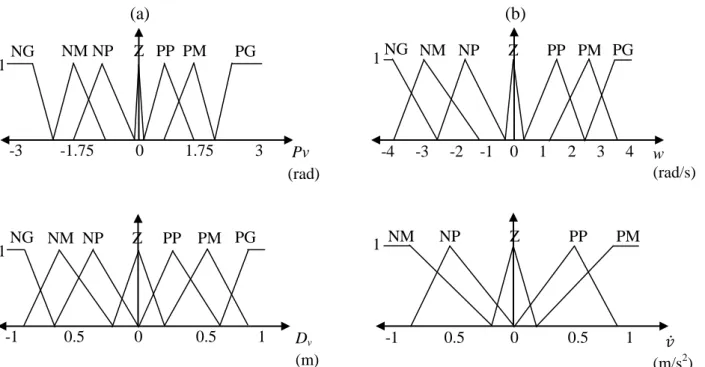
Il comprend principalement deux niveaux; un mécanisme basé sur le système flou et un algorithme modifié des colonies de fourmis pour le réglage autonome des
geodesic exp m (tv) starting at m with tangent vector v is a straight line in this chart going from point p at time -1 to point q at time 1.. One could think of averaging the
(1.5) We prove for any ω > 0 the existence of an unique spherically symmetric ground state by solving an appropriate minimization problem.. We also prove the existence of
Literatur 1. Timmermann B (2010) Proton beam therapy for childhood malignancies: status report. Klin Padiatr 222:127–133
